

GMA_Microprocess_systems_1
.pdfвисимо от сложности системы индицируется информация не старше одной секунды.
Команды на открытие/закрытие клапанов, пуска/остановки насосов осуществляются с помощью курсора.
Отметки времени аварийных сигналов и событий запоминаются, индицируются и печатаются через ROS.
Операторские станции управления с простыми нажимными кнопками могут заменяться стандартной клавиатурой с функциональными клавишами.
Data Chief С20 c дистанционными операторскими станциями ROS применяются в системах, имеющих от 1000 до 2000 каналов на судах с высокой степенью автоматизации: танкерах, балкерах, контейнеровозах, химовозах и других судах специального назначения.
Для пассажирских судов, паромов и ро-ро Data Chief С20 имеет от
2000 до 20000 каналов.
4.4. ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНАЯ СИСТЕМА
GEAMIC-90
Система GEAMIC-90 разработана фирмой Systemtechnic Nord,
построена по модульному принципу и предназначена для контроля параметров и аварийной сигнализации при неисправностях судовых вспомогательных дизелей.
Система GEAMIC-90 состоит из следующих модулей: ДЕ32,
ДЕ56; АЕ16, АЕ32; АЕ40; МТ32.
Модули ДЕ32 и ДЕ56 предназначены для сбора и обработки информации от 32 дискретных (двоичных) датчиков. Входы модулей имеют оптоэлектронную гальваническую развязку. Для управления внешними индикаторными лампами, реле и т. п., каждый модуль имеет восемь выходных реле. Модуль ДЕ56 дополнительно имеет 24 программируемых входных/выходных сигнала. Модули ДЕ32 и ДЕ56 могут быть использованы как самостоятельные информаци- онно-измерительные блоки. Для соединения с другими модулями или интеграции в главную информационно-измерительную систему
401
используется интерфейс RS422 или RS232. Приемник и передатчик дублируются и находятся в горячем резерве. При обрыве в соединительном кабеле или повреждении в передающем модуле другая линия остается в рабочем состоянии.
Состояние входов и выходов модулей индицируется светодиодами.
Дополнительно для кодирования (адресации) модулей при объединении в систему GEAMIC-90 имеются четыре входа и два выхода. Развязка потенциалов этих входов не предусмотрена.
Конструктивно модули ДЕ32 и ДЕ56 выполнены в виде самостоятельных блоков, имеют источник питания, плату центрального микропроцессорного устройства и пять плат оперативной (RAM), постоянной (EPROM) и перепрограммируемой (ЕEPROM) памяти общей емкостью 64К. Для подсоединения кабелей идущих от периферийных датчиков модули снабжены клемными зажимами.
Модули АЕ16 и АЕ32 предназначены для сбора и обработки аналоговых сигналов. Модуль АЕ16 имеет 16 аналоговых входов, а АЕ32 – 32 входа. На входы модулей могут подаваться следующие аналоговые сигналы: напряжение термопары; ток 0–20 мА; напряжение 0–10 В; сигналы с термометра сопротивления. Модули могут использоваться как самостоятельные информационно-измеритель- ные блоки. Для соединения с другими модулями или интеграции в главную информационно-измерительную систему используется интерфейс RS422 или RS232. Приемник и передатчик дублированы и находятся в горячем резерве. При обрыве в соединительном кабеле или повреждении в передающем модуле другая линия остается в рабочем состоянии.
Дополнительно для кодирования модулей при их объединении в систему GEAMIС-90 имеется 4 входа и 2 выхода для двоичных сигналов. Состояние двоичных входов и выходов инденцируется светодиодами.
Конструктивно модули АЕ16 и АЕ32 выполнены в виде самостоятельных блоков, имеют источник питания, плату центрального процессорного элемента, платы постоянной, операторной и перепрограммируемой памяти общей емкостью 64 К. Для под-
402
соединения кабелей, идущих от периферийных датчиков, модули снабжены клемными зажимами. Для токового входа используется кодирующее устройство с помощью параллельного резистора. Это устройство позволяет просто определить и выбрать тип датчика во время подключения.
Модуль АДЕ40 предназначен для ввода и обработки 16 аналоговых сигналов и 24 двоичных, которые могут программироваться на вход и выход. Двоичные входы имеют оптоэлектронную гальваническую развязку. Модуль может использоваться как самостоятельный информационно-измерительный блок, или объединен с другими блоками системы GEAMIС-90 с помощью интерфейса RS422 или RS232. Приемник и передатчик дублированы и работают в горячем резерве. При обрыве кабеля или повреждении в передающем модуле другая линия остается в рабочем состоянии.
Дополнительно для кодирования модуля при объединении в систему GEAMIС-90 имеется четыре двоичных входа и два выхода.
Конструктивно модуль выполнен в виде самостоятельного блока, имеетисточникпитания,платуцентральногопроцессорногоэлемента и интерфейса, платы входов/выходов и платы постоянной, оперативной и перепрограммируемой памяти емкостью 64 К. Предусмотрена индикация состояния двоичных входов и выходов с помощью светодиодов. Для токовых входов используется кодирующее устройство с помощью параллельного резистора.
Панель аварийной сигнализации МТ32 предназначена для отображения 32 аварийных сигналов. Для квитирования аварийных сигналов имеется 3 входа, которые соединяются с внешними кнопками. Панель аварийной сигнализации МТ32 может быть установлена в рулевой рубке, центральном посту управления и других местах. С системой GEAMIС-90 панель соединяется с помощью интерфейса RS422. Максимальная длина кабеля 1000 м. К шине данных может быть подсоединено до 15 аварийных панелей МТ32.
403
4.5. ИНТЕГРИРОВАННАЯ СУДОВАЯ СИСТЕМА УПРАВЛЕНИЯ И КОНТРОЛЯASC
Система ASC разработана фирмой Simrad Albatros AS и предназначена для использования на различных типах судов: пассажирских, танкеров, грузовых, буровых.
Система управления ASC при использовании на пассажирских судах получила название AVM-ALBATROS. При разработке системы AVM особое внимание было уделено ее надежности.
Все жизненно важные части системы имеют полную избыточность или горячий резерв. Для особо важных устройств применяется тройное резервирование.
Функциональная схема системы AVM показана на рис. 4.4.
На всех процессовых и операторских станциях системыAVM применяются 32 разрядные микропроцессоры.
Все функциональные блоки системы имеют одинаковое аппаратное и программное обеспечения.
Система позволяет изменять ее конфигурацию в зависимости от размеров судна, вида и мощности гребной установки.
Операторские станции предназначенные для контроля и управления могут располагаться в различных постах управления в зависимости от типа судна.
Не имеется никаких ограничений по числу соединенных операторских станций. Все операторские станции объединены в локальную высокоскоростную сеть и имеют доступ ко всем функциям внутри общей системы, однако, если требуется, то можно ввести ограничение. Каждая операторская станция состоит из одного графического монитора с высокой разрешающей способностью и клавиатуры.
Дополнительно к операторским станциям в системе находятся станции аварийной сигнализации, принтеры, станции отчетов, расположенные в машинном отделении и на мостике.
Для автоматической системы управления электроэнергетической установкой и системы аварийной сигнализации разработаны мнемосхемы, которые могут быть использованы в системе AVM. В
404
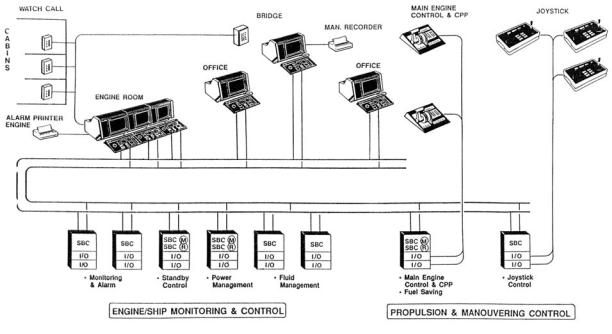
Рис. 4.4. Функциональная схема системы AVM
405
машинном отделении расположены следующие процессовые станции системыAVM: контроля и аварийной сигнализации; управления электроэнергетической установкой; управления резервными электродвигателями; управления вспомогательными механизмами; управления главным двигателем; регистрации маневров и плавания.
Процессовая станция контроля и аварийной сигнализации предназначена для аварийной сигнализации при обнаружении ненормальных условий. При безвахтенном обслуживании все аварийные сигналы группируются и передаются вахтенному механику и на мостиках. При специальных условиях, например, ручной пуск или остановка, аварийные сигналы могут быть подавлены.
Уставки аварийных сигналов могут быть перепрограммированы оператором с панели управления процессовой станции.
Блок управления электроэнергетической установкой имеет избыточную конфигурацию. Процессовая станция управления располагает избыточным компьютером с конфигурацией «горячего резерва», что придает системе высокую надежность.
При управлении дизельгенератором система выполняет следующие функции: пуск и остановку дизеля, выбор резервного дизеля, аварийный пуск, пуск дизель-генераторов после обесточивания, автоматическую синхронизацию, регулирование частоты, несимметричное и симметричное распределение нагрузки, пуск и остановку резерва в зависимости от нагрузки, отключение неответственных потребителей при перегрузке.
В зависимости от задачи и характеристик управляемого процесса модули процессовых станций (SBC) могут быть запрограммированы как пропорциональные (П) регуляторы, пропорционально-интеграль- ные (ПИ) регуляторы и пропорционально-интегрально-дифференци- альные (ПИД) регуляторы.
Регуляторы нашли применение в следующих системах управления: температурой в системе смазочного масла; температурой в системе охлаждающей воды; температурой тяжелого топлива для главных и вспомогательных машин; вязкостью тяжелого топлива; температурой топлива в запасных и грузовых танках; уровнем воды в котле.
406
Система регистрации маневров и плавания собирает данные с механизмов, маневренных и навигационных систем и выдает соответствующую информацию оператору на принтере маневров и дисплее плавания. Принтер маневров печатает все команды для гребной установки и ее состояния во время маневров судна или при плавании.
Регистратор плавания представляет страницу на дисплее, на которой показаны такие данные, как вид топлива, частота вращения, дифферент, крен и шаг винта. На этой же странице показаны навигационные данные: скорость судна, пройденное расстояние, координаты, курс, положение пера руля, данные об окружающей среде.
Информация о расходе топлива, его температуре и вязкости, дифференте, скорости судна, мощности на гребном валу обеспечивает оператора хорошими аналитическими сведениями для определения тенденций расхода топлива, скорости судна, эффективности машин и судна.
Оптимальная работа судна может быть рассчитана для некоторой его загрузки путем сравнения с предыдущей работой судна с действительными измеренными и расчитанными данными.
Следовательно, посредством таких вычислений и специального дисплея с данными предыдущего состояния судна экипаж получает полезную информацию, необходимую для оптимальной работы судна.
Система управления главной машины интегрирует все функции по выполнению управления гребной установкой для оптимальной и безопасной работы машин, винтов, подруливающих устройств и валогенераторов.
Система управления главной машины состоит из 3 главных модулей, показанных на рис. 4.5, резервированной процессовой станцией SBC с интерфейсом, поста управления в машинном отделении, поста управления на мостике.
Процессовая станция соединена сетью с другими системами такими, как система управления электроэнергетической установкой, Joystic системой.
Процессовая станция управления главной машины выполняет следующие функции: пуск дизелей, управление муфтой, управление шагом винта, распределение нагрузки между дизелями, защита ма-
407
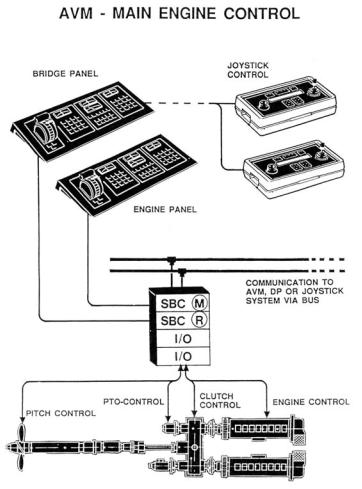
Рис. 4.5. Функциональная схема подсистемы управления главной машины
шины, связь с системой динамического позиционирования, связь с системой AVM.
Для плавучих буровых предназначена система Joystic, которая обеспечивает ручное и автоматическое управление подруливающими
408
устройствами с пульта управления, имеющего координатную ручку
(Joystic).
Система состоит из компьютера и четырех пультов управления. Компьютер имеет одноплатный микропроцессор и процессовую шину, соединенную через модуль ввода-вывода с внешним оборудованием системы. Пульты соединены с компьютером последователь-
ным каналом связи.
Впамяти компьютера записана математическая модель с характеристиками поведения судна и программа функционирования подруливающих устройств.
Программа подруливающих устройств автоматически распределяет команды шага и азимута. При генерировании команд подруливающее устройство находится в состоянии «Готово».
Сигнал «Готово» является сигналом обратной связи для системы управления подруливающим устройством. Получение сигнала обратной связи сообщает компьютеру системы о том, что соответствующее подруливающее устройство готово для приема сигналов управления.
Режимы работы системы задаются с пульта. Возможны два режима работы: ручной и автоматический.
Пульт имеет два органа ручного управления судном: джойстик для перемещения судна и сдвоенную кнопку для разворота судна.
Эти два органа управления позволяют изменять силу подруливающего устройства по величине и направлению.
Джойстик создает результирующий вектор силы подруливающего устройства, а регулятор разворота создает результирующий вращающий момент по часовой или против часовой стрелки.
Вручном режиме управление джойстиком устроено так, что сила подруливающего устройства направлена по движению ручки: нос/ корма, правый борт/левый борт.
Значение шага винта определяется отклонением ручки от нейтрального положения.
Управление разворотом устроено так, что направление поворота кнопки определяет направление разворота судна, а вращающий момент, приложенный к судну, определяется углом поворота кнопки.
409
При достижении судном заданного положения регулятор поворота постепенно возвращается в нейтральное положение.
Вавтоматическом режиме к компьютеру подключается система магнитного компаса или система гирокомпаса. Дополнительно компасы используются для подачи информации об аварийном отклонении судна.
Врежиме автоматической компенсации ветра датчик ветра подсоединяется к компьютеру для обеспечения информацией о скорости и направлении ветра. Информация может быть использована для компенсации силы, вызванной ветром. В этом режиме система действует как миниатюрная система динамического позиционирования.
Система подает сигнал подруливающему устройству, которое компенсирует внешние силы, действующие на судно.
Программное обеспечение позволяет контролировать неисправности системы.
Аварийные и предупредительные состояния индицируются оператору специальными аварийными сообщениями на жидкокристаллическом дисплее и пульте управления.
Для управления и контроля балластных и бункерной судовых систем с различными жидкостями: топливом, смазочным маслом, пресной и забортной водой и т. д., служит соответствующая процессовая станция SBC.
Управление и контроль балластных и бункерных систем осуществляется с операторской станции системы AVM.
Система AVM контролирует уровень жидкости в танках и управляет насосами и клапанами балластных и бункерных систем.
Уровень управления жидкостью зависит от назначения и сложности судовых систем.
Система управления жидкостью имеет три режима работы.
Вручном режиме контроль уровня жидкости в танке заключается
впоказе на дисплее столбиковой диаграммы внутри танка с численными значениями. В зависимости от выбора численные значения представляют уровень жидкости в абсолютных или процентных значениях, вес или объем. Управление насосами и клапанами происходит с диспетчерской станции, на дисплее которой дополнительно
410