

5. Консервативное звено
Консервативное звено является частным случаем колебательного звена.
При
 ,
,
 =>
=> .
.
Дифференциальное уравнение звена:

Тогда передаточная функция:
 .
.
Переходную функцию консервативного
звена можно получить по переходной
функции колебательного при
 ,
, =>
=> .
.



Рис. 9.12 Временные характеристики звена
КЧХ звена:
Рис. 9.13 Частотные характеристики
АФХ начинается на вещественной оси в
точке
 и при подходе к частоте
и при подходе к частоте со стороны меньших значений уходит в
бесконечность в положительном направлении
вещественной оси. При дальнейшем
увеличении частоты характеристика
возвращается из бесконечности и стремится
к началу координат слева.
со стороны меньших значений уходит в
бесконечность в положительном направлении
вещественной оси. При дальнейшем
увеличении частоты характеристика
возвращается из бесконечности и стремится
к началу координат слева.
Таким образом при
 АЧХ имеет разрыв, который соответствует
бесконечному возрастанию амплитуды, а
ФЧХ скачком изменяет свое значение от
0 до –180°.
АЧХ имеет разрыв, который соответствует
бесконечному возрастанию амплитуды, а
ФЧХ скачком изменяет свое значение от
0 до –180°.
§9.2 Интегрирующие звенья
1) Идеальное интегрирующее звено
Идеальное интегрирующее звено - это звено, в котором выходная величина пропорциональна интегралу входной величины.
Дифференциальное уравнение звена:
 или
или
 (1)
(1)
где k– коэффициент передачи.
Коэффициент передачи идеального интегрирующего звена численно равен скорости изменения выходной величины при единичном значении входной. В этих случаях обычно пользуются не коэффицентом передачи, а величиной обратной ему, называемой постоянной времени интегрирования.
 ,
,
Если входная и выходная величина
измеряются в одинаковых единицах, то
 ,
, .
.
Преобразуя (1) по Лапласу получим:
 =>
=>
Передаточная функция:

Переходная функция:

или
 =>
=>

То есть постоянная времени интегрирования представляет собой интервал времени, в течение которого выходная величина достигнет входной.
Весовая функция:

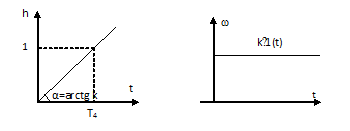
Рис. 9.15 Временные характеристики идеального интегрирующего звена
Комплексная передаточная функция звена:
 ;
;
АЧХ:
 ВЧХ:
ВЧХ:
ФЧХ:
 МЧХ:
МЧХ: .
.
2. Инерционное интегрирующее звено
Дифференциальное уравнение звена имеет вид:

Передаточная функция звена:

=> инерционное интегрирующее звено можно представить как совокупность последовательно включенных звеньев: идеального интегрирующего и апериодического 1-го порядка.
Для нахождения временных характеристик удобно воспользоваться формулой:

Переходная функция звена:


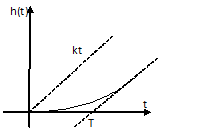
Рис. 9.17 Переходная функция инерционного интегрирующего звена
Весовая функция:

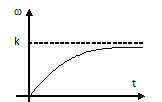
Рис. 9.18 Весовая функция звена.
Комплексная ПФ:

АЧХ:

ФЧХ:

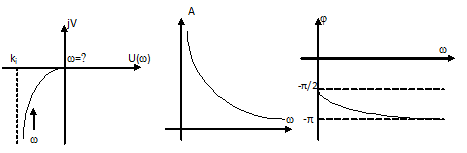
Рис. 9.19 АФХ, АЧХ, ФЧХ звена
3. Изодромное звено
Дифференциальное уравнение имеет вид:

Передаточная функция:
где T=k1/k– постоянная времени изодромного звена.
Данное звено можно представить в виде параллельного соединения идеального интегрирующего и усилительного звеньев.
Переходная функция:
h(t) =L-1{k/p2+k1/p}
=
Весовая функция:
ω(t) =h’(t) =k
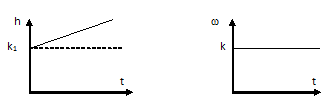
Рис. 9.21 Временные характеристики изодромного звена
Комплексная передаточная функция:
 ,
,
Отсюда ВЧХ: U(ω) =k1; МЧХ:V(ω) = -k/ω;
АЧХ:
 ; ФЧХ:
; ФЧХ: .
.
Рис. 9.22 АФХ, АЧХ, ФЧХ звена
§ 9.3 Дифференцирующие звенья
1. Идеальное дифференцирующее звено
Идеальное дифференцирующее звено – это звено у которого величина на выходе пропорциональна скорости изменения входной величины.
Дифференциальное уравнение звена:
 (1)
(1)
Передаточная функция:

Переходная функция звена:
Весовая функция:

δ’(t) можно представить в виде прямоугольных, достаточно узких и противоположных по знаку импульса, расположенных по разные стороны от точкиt= 0 и стремящиеся по длительности и к 0.
Комплексная передаточная функция:

Тогда АЧХ: A(ω) =kω; ФЧХ:φ(ω) =π/2; ВЧХ:U(ω) = 0; МЧХ:V(ω) =ωk.
Асимптотическая ЛАХ звена:
 (+20 дБ/дек).
(+20 дБ/дек).