

§ 11.3 Пи-регулятор
Регулятор, реализующий ПИ регулирование, называется пропорционально-интегральным регулятором (ПИ-регулятор). У ПИ-регулятора выходная величина изменяется под действием пропорциональной и интегральной составляющих, что обеспечивает наличие положительных
свойств, присущих П- и И-регуляторам.
Уравнение динамики ПИ-регулятора с независимыми параметрами настройки KриTи:
 (1)
(1)
В случае зависимых параметров настройки:
 (2)
(2)
В случае (1) величина
 называетсяпостоянной интегрированияи представляет собой интервал времени,
в течение которого интегральная
составляющая выходной величины достигает
значения входной.
называетсяпостоянной интегрированияи представляет собой интервал времени,
в течение которого интегральная
составляющая выходной величины достигает
значения входной.
Пусть ε(t)=1(t),
тогда из (1) получаем .
.
При t= второе слагаемое равно единице, то есть
входной величине ε(t).
второе слагаемое равно единице, то есть
входной величине ε(t).
Регулирующее воздействие:
 (рисунок 11.5).
(рисунок 11.5).
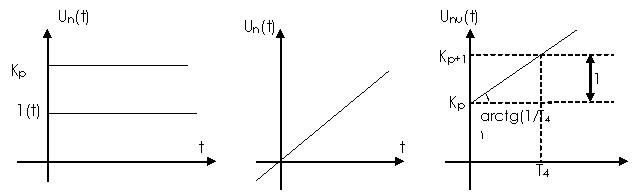
Рисунок 11.5 Составляющие переходных характеристик П-, И-, ПИ-регуляторов.
В случае (2) постоянная
 называетсяпостоянной времени изодрома
и иногда обозначается
называетсяпостоянной времени изодрома
и иногда обозначается
 .
.
Пусть ε(t)=1(t), тогда по выражению (2)
 .
.
При t=
 =2
=2 .
.
То есть при t= действие обоих составляющих одинаково
и равно
действие обоих составляющих одинаково
и равно .
.
Постоянная времени изодрома численно равна интервалу времени, в течение которого регулирующее воздействие изменяется на величину, равную первоначальному изменению за счет пропорциональной составляющей, т.е. увеличивается в 2 раза.
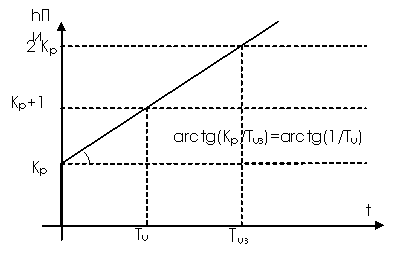
Рисунок 11.6- Переходная характеристика ПИ-регулятора.
В начале переходного процесса в ПИ-регуляторе мгновенно срабатывает пропорциональная (статическая часть), а за тем воздействие на объект постепенно увеличивается за счет интегральной части регулятора, называемой астатической.
Наиболее часто применяется изодромный регулятор, поэтому рассмотрим его свойства:
 (3)
(3)
КЧХ регулятора:
 .
.
АЧХ : .
.
ФЧХ:
 .
.
ВЧХ:
 ; МЧХ:
; МЧХ: .
.
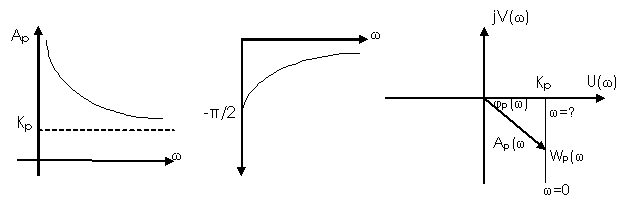
Рисунок 11.7 - Частотные характеристики ПИ-регулятора
ЛАХ регулятора имеет наклон (-20);0 дб/дек.
§11.4 Пропорционально-дифференциальный (пд-регулятор)
П-, И-, и ПИ-регуляторы не могут упреждать ожидаемые отклонения регулируемой величины, реагируя только на имеющиеся в данный момент времени нарушения технологического процесса .Если регулируемая величина начинает быстро отклоняться от заданного значения ,то это значит, что на объект поступили значительные возмущения и отклонение будет значительным .В этом случае желательно иметь регулятор ,который вырабатывал бы регулирующее воздействие, пропорционально скорости изменения регулируемой величины ,упреждая её отклонения.
В САР используется ПД-регуляторы , оказывающие воздействия на регулирующий орган пропорционально отклонению регулируемой величины и скорости изменения этого отклонения.
U(t)= *
* +
+ *
* .
.
Постоянная
 называетсяпостоянной времени
дифференцированияи определяет
величину регулирующего воздействия по
производной от отклонения.
называетсяпостоянной времени
дифференцированияи определяет
величину регулирующего воздействия по
производной от отклонения.
Рассмотрим переходную характеристику ПД- регулятора(рисунок 11.8).
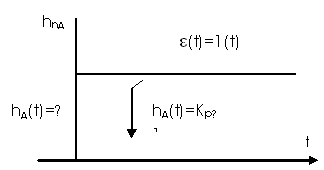
Рисунок 11.8 Переходная характеристика ПД-регулятора
При подаче на вход регулятора сигнала
 =1(t)
на выходе появится бесконечно большой
сигнал от действия дифференциальной
составляющей
=1(t)
на выходе появится бесконечно большой
сигнал от действия дифференциальной
составляющей =
= и сигнал от пропорциональной составляющей
и сигнал от пропорциональной составляющей =
= *1(t).Сигнал
*1(t).Сигнал сразу же падает до нуля , а сигнал
сразу же падает до нуля , а сигнал остаётся постоянным и равным
первоначальному.
остаётся постоянным и равным
первоначальному.
Введение в закон регулирования производной по отклонению существенно повышает эффективность работы регулятора.
При поступлении на объект возмущающего воздействия отклонение регулируемой величины от заданного значения в связи с инерционностью объекта нарастает постепенно и дифференцирование этого отклонения даёт конечное значение как по абсолютной величине , так и по длительности.
Пример . Пусть отклонение регулируемой величины изменяется по закону:
 =a*t
, тогда
=a*t
, тогда
U(t)=
 ∙
а∙t+
∙
а∙t+
 ∙
a;
∙
a;
В начальный момент времени срабатывает Д-составляющая , а за тем воздействие на объект увеличивается по нарастающей за счёт П-составляющей.
Передаточная функция: W(p)= +
+ ∙p.
∙p.
КЧХ: W(jw)= +
+ ∙j∙w=U(w)+j∙V(w).
∙j∙w=U(w)+j∙V(w).
АЧХ: A(w)=
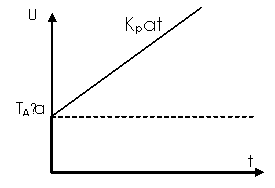
Рисунок 11.9 Переходная характеристика ПД-регулятора
ФЧХ:

ЛЧХ: L(w)=20Lg
1. При
 <
< w<
w< /
/
L1(w)=20Lg (0 дб/дек)
(0 дб/дек)
2. При w> /
/
L2(w)=20Lgw =20Lg
=20Lg +20Lgw(+20 дб/дек).
+20Lgw(+20 дб/дек).
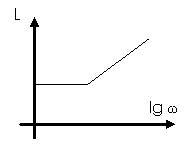
Рисунок 11.10 ЛАХ ПД- регулятора