

Преобразовательная техника
.pdf
|
|
|
e2 e2a |
e2b |
e2c |
|
e2a |
e2b |
|
|
|
|
|
p |
|
2p |
|
|
|
|
|
|
|
|
|
q |
e2a |
e2b |
e2c |
|
|
|
|
|
|
|
|
|
Ed |
|
|
|
|
|
X a |
X a |
X a |
|
|
|
|
|
|
B4 |
|
B1 |
ia |
|
|
|
g |
q |
|
|
|
|
|
|
|||
B6 |
|
B3 |
|
|
|
i |
|
|
|
i |
i |
i |
|
i |
|||
|
|
|
a1 |
a3 |
a5 |
|
a1 |
a3 |
B2 |
|
B5 |
ia2 |
ia 4 |
ia6 |
ia2 |
q |
|
|
Uв1 |
|
|
|
|
|
||
|
Rd |
X d |
|
|
|
|
|
|
|
|
|
|
|
|
q |
||
|
|
|
|
eab |
|
eac |
|
|
Рис. 2.22. Коммутационные процессы в трехфазном мостовом выпрямителе
характеристики будет иметь вид |
|
|
|
Id X a |
|
|
||||||
E |
d |
= E |
- DU |
x |
= 2,34E |
- |
, |
(2.79) |
||||
|
||||||||||||
|
d max |
|
2 |
|
|
2π |
|
|||||
|
|
|
|
|
|
|
|
6 |
|
|
|
|
т. е. внешняя характеристика Ed = f (Id ) будет линейной и имеет па-
дающий характер. Этот вывод справедлив только в пределахg < p . 3
При достижении g = p возникает особенность, отмеченная на рис. 2.23,
3
e2 |
e |
e |
a¢ |
|
e |
e |
|
e |
|||||
|
2a |
2b |
|
|
|
|
|
2c |
2a |
|
2b |
||
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|


 q
q
Ud






 a¢
a¢ 

q
Рис. 2.23. Процессы в трехфазном мостовом выпрямителе при g > p
2
81
заключающаяся в том, что дальнейшего роста g при увеличении Id не будет, так как до тех пор, пока не закончится коммутация вентилей в одной группе, не может начаться коммутация вентилей в другой, из-за изменения потенциалов на коммутируемых вентилях в группе, где коммутация заканчивается. Это приводит к вынужденной задержке начала коммутационных процессов на угол a¢, называемый углом саморегули-
рования. |
|
|
|
|
|
|
|
||||
|
|
|
В таком режиме внешняя характеристика выпрямителя становится |
||||||||
нелинейной |
и |
представляет |
собой |
дугу [3]: |
эллипса |
||||||
|
4X a |
2 |
Id2 + |
2π2Ed2 |
=1. |
И лишь когда уголa¢ |
достигает |
p |
, |
начнется |
|
|
6E22 |
81E22 |
|
|
|||||||
|
|
|
|
6 |
|
|
|
||||
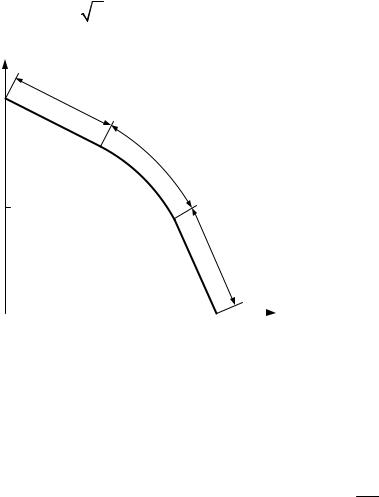
дальнейший рост угла g (рис. 2.24).
g, a
g
a
Id*
Рис. 2.24. Зависимость угла коммутации
иугла саморегулирования от тока нагрузки
Вэтом режиме будет иметь место перекрытие коммутаций в анодной и катодной группах, а следовательно, на участках перекрытия из-за того, что в схеме моста будут одновременно открыты четыре вен-
тиля, нагрузка будет замыкаться накоротко и в этих интервалахed = 0 , а постоянная составляющая Ed по этой причине будет уменьшаться по линейному закону.
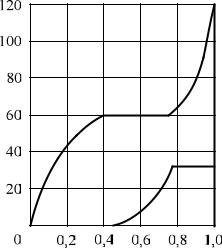
Полная внешняя характеристика представлена на рис. 2.25, где отмечены участки, соответствующие всем трем режимам(I, II, III). Здесь
82
Id* = |
Id |
, |
|
Id max = |
2E2 |
, Ed* = |
Ed |
, Ed max = 2,34E2. |
|
|
|
||||||
|
Id max |
|
|
xd |
Ed max |
|||
|
Ed* |
|
I |
|
|
|||
1,0 |
|
|
|
|||||
|
|
|
|
|
|
|||
II
0,5
III
|
|
|
|
|
0 |
0,5 |
1,0 Id* |
||
Рис. 2.25. Внешняя характеристика трёхфазного мостового выпрямителя
Форма обратного напряжения на вентиле показана на рис. 2.22, д. Следует отметить, что выводы и зависимости, полученные для трехфазных выпрямителей, справедливы для любого многофазного выпрямителя, но при этом нужно учитывать, что период повторяемости выпрям-
ленного напряжения в многофазных выпрямителях составляет 2 π , где m
m – параметр, называемый пульсностью выпрямителя и определяющий количество пульсаций выпрямленного напряжения за один период -на пряжения питания. От этого будет зависеть и величина постоянной составляющей, и величина коммутационного падения напряжения DU x .
2.2. УПРАВЛЯЕМЫЕ ВЫПРЯМИТЕЛИ
Выпрямители, позволяющие регулировать величину выпрямленного напряжения в заданных пределах, называются управляемыми. Регулировать величину выпрямленного напряжения можно двумя принципиально различными способами:
1.Изменять каким-либо способом величину подводимого к -вы прямителю напряжения (например, с помощью автотрансформатора, ступенчато регулируемых трансформаторов, дросселей насыщения и др.).
2.Использовать в выпрямителях свойства управляемых вентилей (с полной или частичной управляемостью).
83
Наибольшее распространение в технике получили управляемые выпрямители, относящиеся ко второй группе. Их рассмотрению и будет посвящен данный раздел.
2.2.1.Однофазные управляемые выпрямители
2.2.1.1.Однополупериодный управляемый выпрямитель
Простейшая схема управляемого выпрямителя представлена на рис. 2.26, а. В качестве силового вентиля в этой схеме выпрямления используется тиристор - вентиль с частичной управляемостью. Принципиально здесь можно использовать полностью управляемый вентиль (транзистор или двухоперационный тиристор), свойства последних позволяют их использовать только в вентильных преобразователях сравнительно небольшой мощности. Преобразователи средней и большой мощности обычно строятся на тиристорах.
|
|
|
e2 |
|
|
|
|
p |
2p |
|
|
|
|
q |
|
+ |
Rd |
Ud |
|
U1 |
e2 |
a |
a |
|
|
- |
|
||
|
|
|
q |
|
|
|
|
Uт |
|
|
|
|
Uпр max |
|
|
|
|
|
|
|
|
|
Uобр max |
q |
|
|
|
|
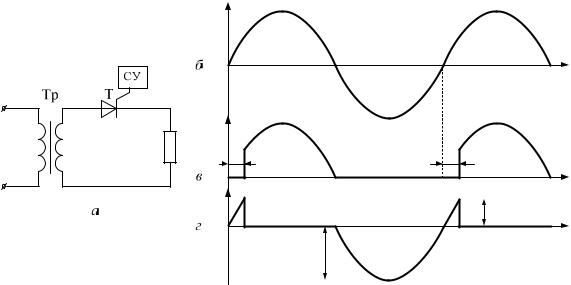
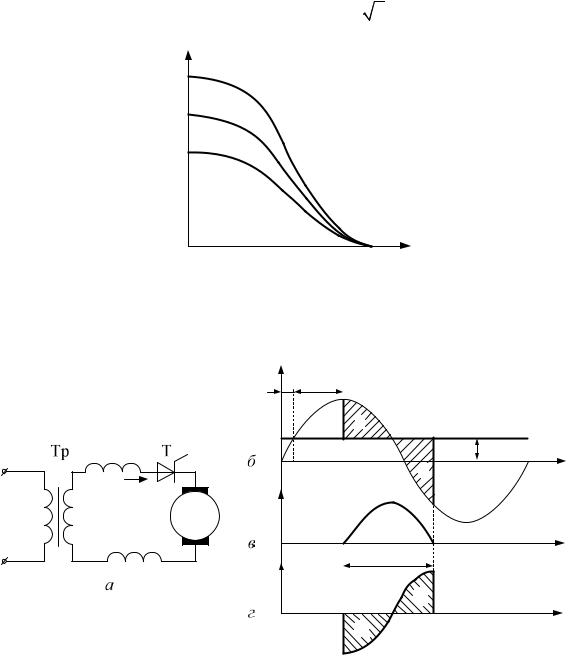
Рис. 2.26. Однофазный однополупериодный управляемый выпрямитель
Как известно, для перевода тиристора в проводящее состояние необходимо выполнение одновременно двух условий:
1.Наличие положительного потенциала на аноде относительно катода Uак .
2.Наличие в цепи управления токаiу , достаточного для включе-
ния тиристора при данной величине Uак .
Формирование тока управления осуществляется специальным устройством – системой управления (СУ). В дальнейшем во всех схемах управления вентильных преобразователей система управления будетподразумеваться, но на рисунках изображаться не будет.
84

Пусть в положительный полупериод ЭДС e2 система управления
формирует сигнал на |
включение тиристора со сдвигом по |
фазе на |
угол a относительно |
точки . ОТогда при допущениях, принятых |
в |
п. 2.1.1 ток в нагрузке будет протекать на интервале aKp под действием выпрямленного напряжения Ud (рис. 2.26, в). В точке p тиристор закроется, так как полярность ЭДС e2 изменится на противоположную, и снова тиристор сможет открыться только в точке( 2p + a ), когда система управления снова подаст сигнал на его включение. Постоянная составляющая выпрямленного напряжения при этом
|
|
π |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ed = |
1 |
|
|
|
E2 sin θdθ = |
2 2E2 |
(1 + cos a). |
|
|||||||||||
ò |
|
|
2 |
(2.80) |
|||||||||||||||
2π |
|
|
|||||||||||||||||
|
0 |
|
|
|
|
|
|
|
|
|
2π |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
= |
|
|
E2 |
, Ed min |
|
|
|
|||||||||
Очевидно, что Ed max |
|
a=0 |
2 |
|
a = p = 0 . |
|
|||||||||||||
|
|
|
|
||||||||||||||||
|
|
||||||||||||||||||
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
π |
|
|
|
|
||||||
Угол a, на который запаздывает включение вентиля Т относительно точки естественной коммутации, называется углом управления или углом включения вентиля.
Из рис. 2.26, г следует, что в управляемом выпрямителе к вентилю, кроме обратного (запирающего) напряжения, прикладывается еще и прямое напряжение на участке 2pK(2p + a):
Uпр max = 
 2E2 sin q.
2E2 sin q.
Вчастном случае, при a = 0 все электромагнитные процессы управляемых выпрямителей и основные расчетные соотношения аналогичны рассмотренным ранее для соответствующих схем неуправляемых выпрямителей.
При активно-индуктивном характере нагрузки(рис. 2.27) справедливо уравнение:
|
|
|
|
|
|
|
i R |
+ (X |
a |
+ X |
d |
) |
did |
= e |
2 |
. |
|
|
||
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
d |
|
d |
|
|
|
dθ |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Обозначая |
X a + X d = X |
и |
учитывая, что |
e2 = |
2 |
E2 sin θ, |
||||||||||||||
это уравнение относительно id : |
|
|
|
|
|
|
|
|
|
|
||||||||||
i |
= |
|
|
|
|
2 |
E2 |
|
ésin (θ - j)- sin (a - j)e-(θ-α)ctgj ù , |
|||||||||||
|
|
|
|
|
|
|
||||||||||||||
d |
|
|
|
|
|
|
|
ê |
|
|
|
|
|
|
|
|
|
ú |
||
|
|
|
|
R2 + X 2 ë |
|
|
|
|
|
|
|
|
|
û |
||||||
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
æ |
X ö |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где j = arctg ç |
|
÷ |
. Графическое |
|
изображение |
этой |
функции |
|||||||||||||
R |
|
|||||||||||||||||||
è |
d ø |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
лено на рис. 2.27, в.
(2.81)
решаем
(2.82)
представ-
85
|
|
|
|
e2 , |
Ud |
|
|
|
|
|
|
Ud |
|
|
|
|
|
|
|
|
p |
2p |
|
|
|
X a |
|
|
|
|
q |
|
|
|
|
|
e2 |
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
id |
a |
|
|
U |
e |
id |
Rd |
|
|
||
1 |
2 |
X d |
|
|
|
|
|
|
- |
|
|
l |
a |
q |
|
|
|
|
|
ex |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q |
Рис. 2.27. Однофазный однополупериодный управляемый выпрямитель с активно-индуктивной нагрузкой
Зависимость Ed = f (a) называется регулировочной характеристикой управляемого выпрямителя.
Из условия id q = a + l = 0 находим:
sin(a + l - j)= sin(a - j)e-ctgjl .
Зависимость между l, a и j представлена на рис. 2.28. l
2p
|
Rd |
= 0 |
|
p |
|
|
|
|
X = 0 |
|
|
0 |
|
|
|
|
p a |
||
Рис. 2.28. Зависимость длительности проводящего состояния вентиля
от угла управления и параметров нагрузки
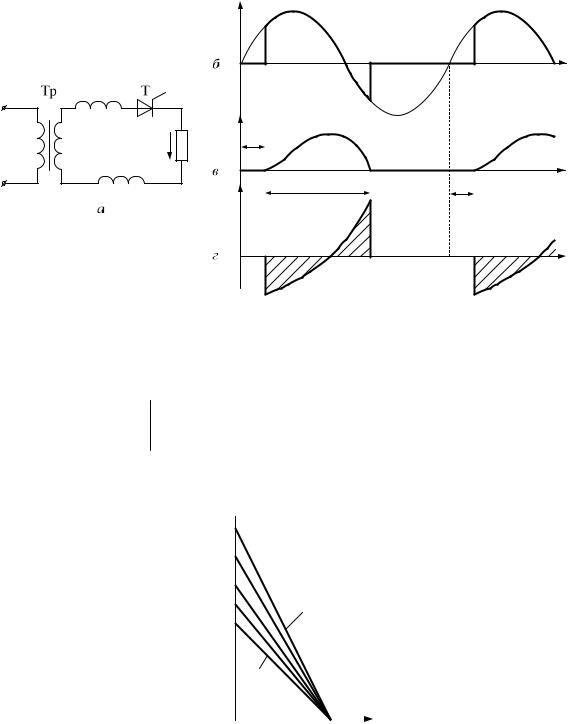
Зная зависимость l = f (a), можно получить регулировочную характеристику (рис. 2.29, г).
На рис. 2.27, г изображена ЭДС:
86
e |
X |
= -X |
did |
, e |
X |
= e - i R . |
||||
|
||||||||||
|
|
|
dq |
2 |
d d |
|||||
В точке q = a |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
id = 0, |
eX |
q = a = e2 |
q = a = |
|
|
E2 sin a . |
||||
|
2 |
|||||||||
Ed max |
|
j = 0 |
|
|
|
|
|
|
|
|
|
|
j1 |
|
|
|
|
|
|
|
|
|
j2 > j1 |
|
|
|
|
|
|
|
||
0 |
p a |
Рис. 2.29. Семейство регулировочных характеристик однофазного однополупериодного управляемого выпрямителя
При работе управляемого выпрямителя на противоЭДС имеются следующие особенности (рис. 2.30).
|
|
e2 y |
a |
|
|
|
|
|
S |
p |
|
|
X a |
О1 |
О2 О3 |
О4 |
E0 2p |
|
id |
+ |
|
S |
q |
|
|
|
|
||
U |
e2 |
ia |
|
|
|
E0 |
|
|
|
||
1 |
X d |
- |
|
|
|
|
l |
|
q |
||
|
|
ex |
|
||
|
|
|
S1 |
|
|
|
|
|
|
|
|
|
|
|
S1 |
|
q |
Рис. 2.30. Работа однофазного однополупериодного управляемого выпрямителя на двигательную нагрузку
Вентиль Т включается в точке(y + a), где a – угол управления. Из-за наличия в цепи нагрузки индуктивных сопротивлений (X a + X d )
87

ток будет затягиваться за точкуO3 . Ток id может быть определен из уравнения
|
|
|
e |
- (X |
a |
+ X |
d |
) |
did |
= E . |
|
(2.83) |
|
|||
|
|
|
|
|||||||||||||
|
2 |
|
|
|
|
dθ |
0 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Решая уравнение (2.83), получаем: |
|
|
|
|
|
|
||||||||||
|
|
|
E2 |
|
écos(a + ψ) - cos (θ + ψ)ù + |
E0 |
|
|
||||||||
i = |
|
2 |
(a - θ). (2.84) |
|
||||||||||||
|
|
|
|
X |
|
|||||||||||
d |
(X a + X d ) ë |
|
|
|
|
|
û |
|
|
|
||||||
ЭДС |
самоиндукции eX |
= -(X a + X d ) |
did |
|
|
изображена |
на |
|||||||||
dθ |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
рис. 2.30, г и в точке q = y + a будет равна -eX = e2 - E0 .
Интервал l определяется из равенства площадей заштрихованных участков на рис. 2.30, б, так как количество энергии, запасенной в маг-
нитном |
поле индуктивных сопротивленийX a + X d |
на |
участке |
O2 KO3 , полностью расходуется на участке O3 KO4 . |
|
|
|
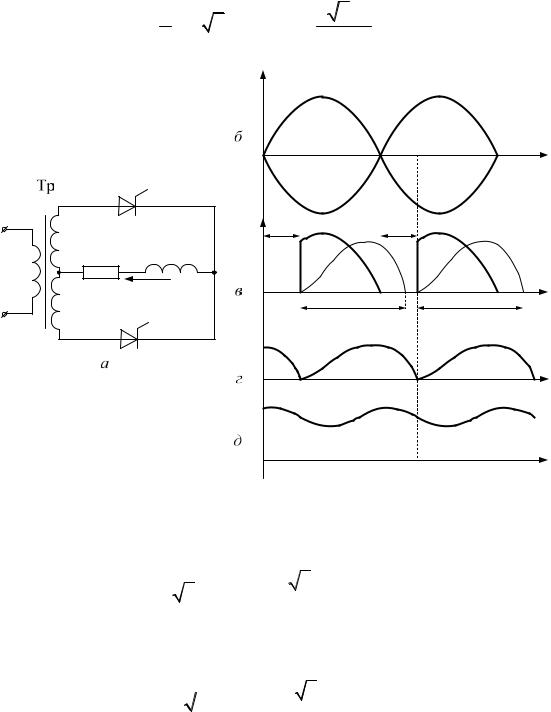
2.2.1.2. Двухполупериодный управляемый выпрямитель со средней точкой
При условии X = 0 и a > 0 (рис. 2.31, в – сплошная линия) между периодами протекания тока имеет местобестоковая пауза, которая может сохраняться и при активно-индуктивной нагрузке(рис. 2.31, в - тонкая линия), если длительность протекания тока l < p. Такой режим
соответствует прерывистому току нагрузки. При увеличении индуктив- |
|
||||||||||||||||||
ности в цепи нагрузки получим сначала гранично-непрерывный режим |
|
||||||||||||||||||
(рис. 2.31, г), когда |
l = p, |
а |
|
|
|
затем |
режим |
непрерывного |
тока |
||||||||||
(рис. 2.31, д). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Особенности этих трех режимов обусловлены различиями в элек- |
|
||||||||||||||||||
тромагнитных процессах. Так, мгновенное значение тока нагрузки в ре- |
|
||||||||||||||||||
жиме прерывистых токов и в гранично-непрерывном определяется вы- |
|
||||||||||||||||||
ражением, выведенным для однополупериодного управляемого выпря- |
|
||||||||||||||||||
мителя, а в режиме непрерывного тока из-за ненулевых начальных ус- |
|
||||||||||||||||||
ловий: id |
q = a = id |
q = p + a ток нагрузки определяется из выражения |
|
||||||||||||||||
|
|
|
|
|
E2 |
|
|
ésin (a - j) |
|
|
|
ù |
|
||||||
|
|
|
|
2 |
|
-ctgj(q-a) |
|
|
|||||||||||
|
id = |
|
|
|
|
|
|
|
ê |
|
|
|
|
e |
|
+ sin (q - j)ú . (2.85) |
|
||
|
|
|
|
|
|
|
|
|
-ctg fπ |
-1 |
|
|
|||||||
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
R2 + X 2 ëe |
|
|
|
|
|
û |
|
|||||||||
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Как видно из рис. 2.31, б, в, при увеличении индуктивности в цепи нагрузки происходит затягивание тока id за точку p, в результате чего появляется отрицательный участок в кривой выпрямленного напряже-
88
ния, что снижает величину его постоянной составляющейEd . Так, в |
||||||
режимах непрерывного тока и гранично-непрерывного тока Ed |
опреде- |
|||||
ляется по выражению: |
π+α 2E2 sin θdθ = 2 |
|
|
|
||
|
Ed = 1 |
2E2 cosa . |
|
(2.86) |
||
|
π |
ò |
|
π |
|
|
|
|
a |
|
|
|
|
|
|
e2 |
e2a |
|
e2b |
|
|
|
|
|
p |
|
2p |
|
T1 |
|
|
|
|
q |
|
|
|
|
|
|
|
e2a R |
X |
id |
a |
a |
|
|
d |
|
|
|
|
||
d |
|
|
ia1 |
ia2 |
|
|
U1 |
id |
|
|
|
||
e2b |
|
|
l |
l |
q |
|
T2 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
ia1 |
ia2 |
|
|
|
|
|
|
|
q |
|
|
|
|
ia1 |
ia2 |
|
|
|
|
|
|
|
q |
Рис. 2.31. Двухполупериодный управляемый выпрямитель |
|
|||||
|
при активно-индуктивной нагрузке |
|
|
|||
В режиме прерывистых токов Ed |
находится по выражению |
|||||||||||||||||
|
|
1 λ+α |
|
|
|
|
|
|
|
E |
|
|
|
|
||||
|
|
|
|
|
|
|
2 |
|
écosa - cos(a + λ) |
|
||||||||
|
|
|
|
|
|
|
|
|
||||||||||
E = |
|
ò |
|
2E sin θdθ = |
|
|
|
|
2 |
ù , (2.87) |
||||||||
π |
|
|
|
|
|
|
|
|||||||||||
d |
|
|
2 |
|
|
π |
ë |
û |
||||||||||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где l можно определить из рис. 2.28. |
|
|
|
|
|
|
|
|
||||||||||
При чисто активной нагрузке это выражение имеет вид: |
|
|||||||||||||||||
|
|
|
|
1 π |
|
|
|
|
|
|
|
E |
|
|||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
E |
|
= |
|
|
|
2E sinθdθ = |
|
|
|
|
|
2 |
[1 + cosa]. |
(2.88) |
|||
|
d |
π ò |
|
|
|
|
π |
|
||||||||||
|
|
|
2 |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
α
Регулировочные характеристики, построенные по выражениям (2.82-2.88), имеют вид, показанный на рис. 2.32.
89
Ed |
X = 0 |
Ed max |
X1 < X 2 < X 3
X = ¥
0 |
p |
p a |
2
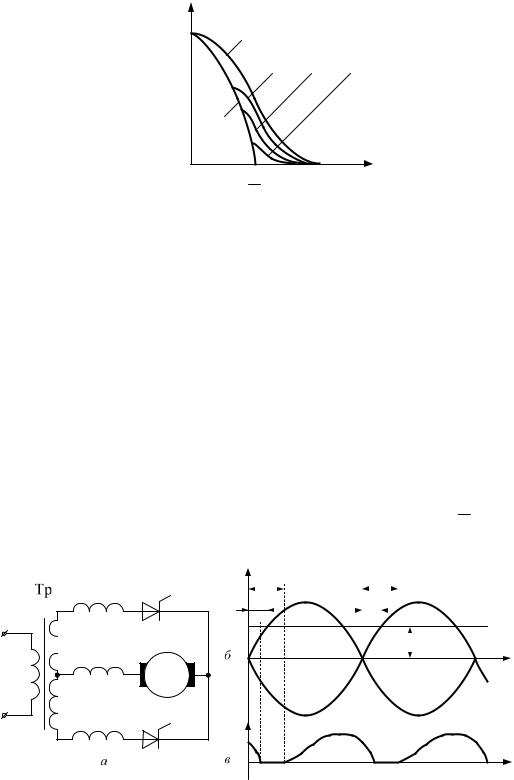
Рис. 2.32. Семейство регулировочных характеристик двухполупериодного управляемого выпрямителя
Здесь две кривые X = 0 и X = ¥ ограничивают семейство регулировочных характеристик для любого соотношенияX и R в цепи нагрузки. Если цепь нагрузки рассматриваемой схемы содержит противоЭДС, то необходимо учитывать некоторые возникающие при этом особенности.
В отличие от неуправляемого выпрямителя в этой схеме режим работы (с непрерывным током, гранично-непрерывным или прерывистым) зависит не только от величины X d и противоЭДС E0 , но еще и
от угла управления a. Следует отметить, что при отсутствии или малом значении X a , при a < y (рис. 2.33) система управления должна форми-
ровать широкий сигнал управления длительностью не менее p , т. к. при
2
узких управляющих импульсах вентили могут не открыться.
X a
 e2a X d
e2a X d
U1
e2b
X a
T1 |
|
- |
+ |
|
E0 |
T2 |
|
e2 a |
|
e2a |
|
a |
|
e2b |
||||
|
y |
|
|
|
y |
|
|
|
||
p 


 E0 2p
E0 2p 


 q
q
ia |
ia1 |
ia2 |
|
q
Рис. 2.33. Работа двухполупериодного управляемого выпрямителя на двигательную нагрузку
90