

2. Расчёт проектируемой конструкции на прочность
2.1. Определение грузоподъёмности
Согласно технологическому заданию грузоподъёмность стенда стационарного стенда ZX0601-4 670 кг. Данную грузоподъёмность выбираем исходя из того, что стенд предназначен для разборки-сборки автомобильных двигателей, КПП, задних мостов и агрегатов отечественного и импортного производства, весом не более 560 кг.
Следовательно предполагаемая сила тяжести составит:
G=m*g, где
m - масса груза кг;
g - ускорение свободного падения, которое составляет 9,8 м/с;
G=670*9,8=6556 Н
2.2. Разборка кинематической схемы приспособления
Кинематическая схема - это такая схема, на которой показана последовательность передачи движения от двигателя через передаточныймеханизмк рабочим органаммашины(например, шпинделюстанка, режущему инструменту, ведущим колёсамавтомобиляи др.) и их взаимосвязь.
На кинематических схемах изображают только те элементымашиныилимеханизма, которые принимают участие в передаче движения (зубчатые колёса, ходовыевинты,валы,шкивы,муфтыи др.) без соблюдения размеров и пропорций.
Кроме условных графических обозначений, на кинематических схемах дают указания в виде надписей, поясняющих изображённый элемент. Например, указывают тип и характеристику двигателя, диаметры шкивов, модуль и число зубьев зубчатых колёс и др. Взаимное расположение звеньев на кинематической схеме должно соответствовать начальному, среднему или рабочему положению исполнительных органов механизма или машины.
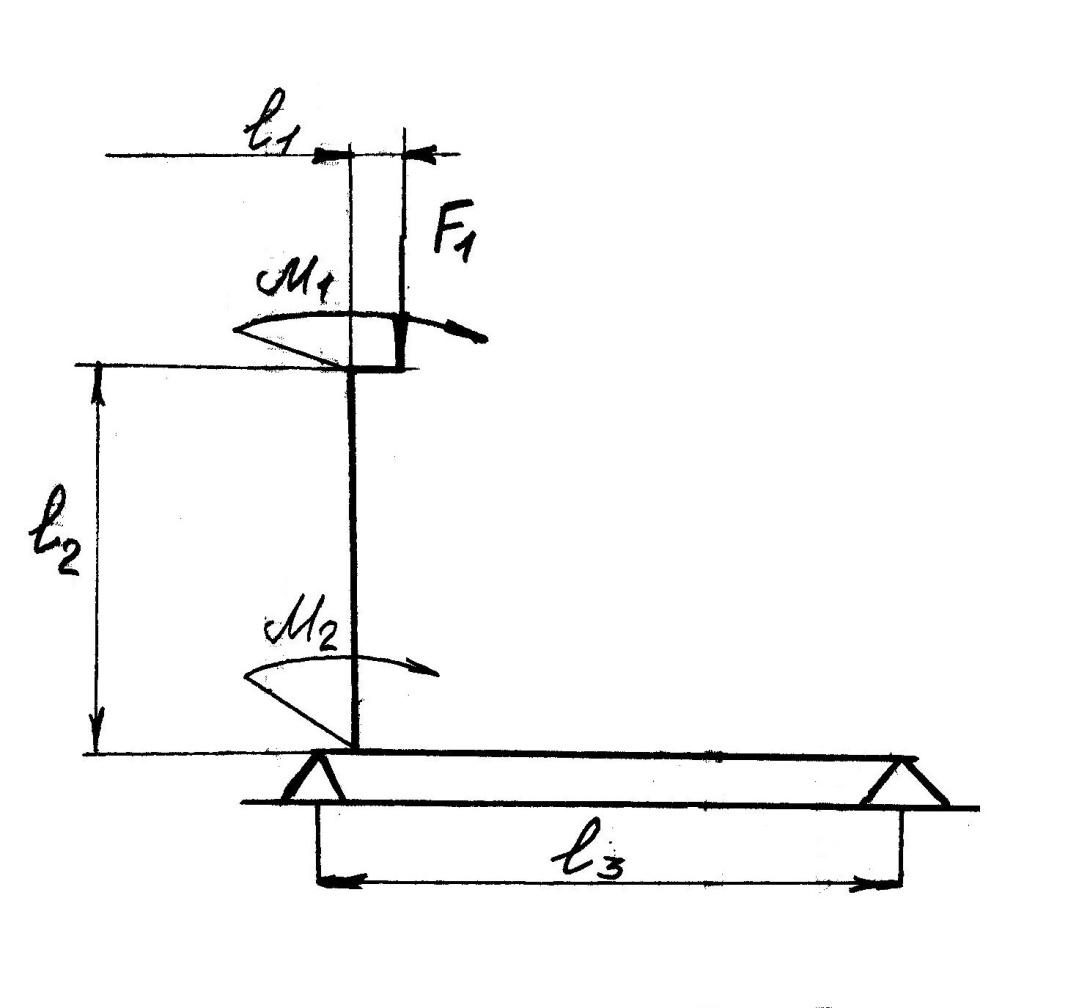
Рис. 10 Кинематическая схема стенда ZX0601-4
где F1 - cила возникающая при креплении ремонтируемого агрегата. Данные усилия взяты с технического задания, 560 кг = 5488 кН.
М1- момент создаваемый закреплённым на стойке агрегатом.
М2 - момент создаваемый на нижней балке, нагрузка на которую передаётся со стойки.
l1-длина стойки, 95 см = 0,95 м
l2-длина неподвижного плеча. В данном случае балки удерживающей верхнюю часть конструкции 1195 см =1,195 м
2.3. Расчёт кинематической схемы
Данную конструкцию разделим на 3 расчетные части.
1. Расчёт неподвижного плеча (верхней балки).
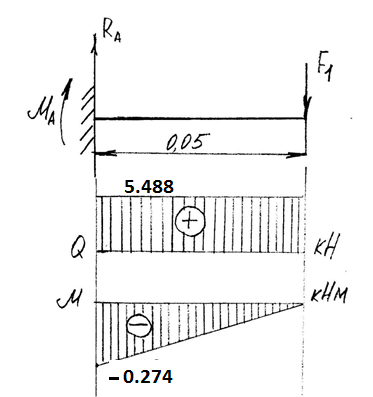
Рис. 11 Построение эпюр неподвижного плеча (верхней балки)
Дано:
F1 = 5,488кН
l1= 0.05 м.
Сумма моментов всех сил относительно точки A должна равняться нулю:
∑MA = - MA - F1c1
∑MA =- MA – 5,488·0.05 =
= - MA - 0.274 = 0 ⇒
⇒ MA = -0.274 кНм;;
Сумма проекций всех сил на вертикальную ось должна равняться нулю:
∑Y = RA - F
∑Y = RA – 5,488 =
= RA – 5,488 = 0 ⇒
⇒ RA = 5,488 кН;
Для проверки вычислим сумму моментов всех сил относительно точки B:
∑MB = - MA - RA L + F1(L - c1)
∑MB = 0.274 – 5,488·0.05 + 5,488·(0.05 - 0.05) =
= 0.274 - 0.274 + 0 = 0;
Участок I (0 ≤ z ≤ 0,05):
Поперечная сила Q:
QI(0) = 5,488 кН;
QI(0.05) = 5,488 кН;
Изгибающий момент M:
MI(0) = 5,488·0 - 0.274 = -0.274 кНм;
MI(0.05) = 5,488·0.05 - 0.274 = 0;
По полученным данным строим эпюры.
2. Расчёт стойки.

Рис. 12 Построение эпюр стойки.
Дано:
М1 = F1*l1
М1 = 5,488*0,05=0,274 кНм
l1 = 0,05м
l2 = 0,95м
Сумма моментов всех сил относительно точки A должна равняться нулю:
∑MA = - MA - M1
∑MA = - MA - 0.274 =
= - MA - 0.274 = 0 ⇒
⇒ MA = -0.274 кНм;
Сумма проекций всех сил на вертикальную ось должна равняться нулю:
∑Y = RA = RA =
= RA + 0 = 0 ⇒
⇒ RA = 0;
Для проверки вычислим сумму моментов всех сил относительно точки B:
∑MB = - MA - RA L - M1
∑MB = 0.274 + 0·0.95 - 0.274 =
= 0.274 + 0 - 0.274= 0;
Участок I (0 ≤ z ≤ 0.95):
Поперечная сила Q:
QI(0) = 0;
QI(0.95) = 0.
Изгибающий момент M:
MI(0) = -0.274 кНм;
MI(0.95) = -0.274 кНм;
3. Расчёт нижней балки.
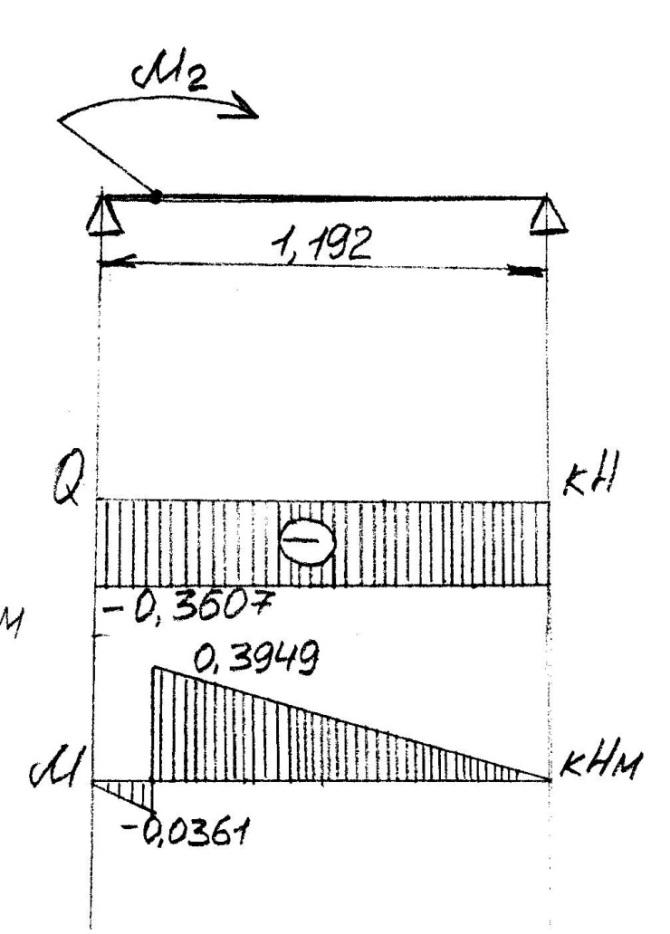
Рис. 13 Построение эпюр нижней балки.
М2 = М1+10%
М2 = 0,274+0,274=0,548кНм
Сумма моментов всех сил относительно точки B должна равняться нулю:
∑MB =- RA L - M1 = - RA·1.195 - 0.548 =
= - RA·1.195 - 0.548 = 0 ⇒
⇒ RA = -0.548/1.195 = -0.458 кН;
Сумма моментов всех сил относительно точки A должна равняться нулю:
∑MA = RB L - M1 = RB·1.195 - 0.548 =
= RB·1.195 - 0.548 = 0 ⇒
⇒ RB = 0.548/1.195 = 0.458 кН;
Для проверки вычислим сумму проекций всех сил на вертикальную ось:
∑Y = = RA + RB
∑Y = -0.458 + 0.458 = 0;
Участок I (0 ≤ z ≤ 0,1):
Поперечная сила Q:
QI(0) = -0.458 кН;
QI(0.1) = -0.458 кН;
Изгибающий момент M:
MI(0) = -0.458·0 = 0;
MI(0.1) = -0.458·0.1 = -0.0458 кНм;
Участок II (0.1 ≤ z ≤ 1.195):
Поперечная сила Q:
QII(0.1) = -0.458 кН;
QII(1.195) = -0.458 кН;
Изгибающий момент M:
MII(0.1) = -0.458·0.1 + 0.548 = 0.5 кНм;
MII(1.195) = -0.458·1.195 + 0.548 = 0;