

3.3. Зміст першого домашнього завдання
1. Провести структурний аналіз механізму.
2. Побудувати 12 положень механізму і траєкторію руху точки Е (схеми
І -VІ) і точки С (схеми VI-VII). Побудову проводити в масштабі.
3. Побудувати плани швидкостей та прискорень для двох заданих положень ведучої ланки 1 і 2.
4. Силовий аналіз плоских механізмів
Проводимо силовий аналіз заданого механізму в положенні 2=90°.
Додатково задано: маси ланок m1=4 кг; m2=2 кг; m3=6 кг; моменти інерції ланок відносно осі, що проходить крізь центр ваги ланок IS1=2,1 кгм2; IS2=3 кгм2; IS3=0,8 кгм2; Fк.0 = 50 Н.
4.1. Знаходження сил інерції та моментів сил інерції ланок механізму
Ланка 1. Так як ланка обертається рівномірно (1=const; 1=0), то система елементарних сил інерції точок ланки зводиться до головного вектору сил інерції, який прикладається в центрі ваги ланки:
![]() H.
H.
Ланка 2.
![]() H;
H;
![]() Hм.
Hм.
Момент замінюємо парою сил:
![]() Н.
Н.
Ланка 3.
![]() H;
H;
![]() Hм.
Hм.
Момент замінюємо парою сил:
![]() Н.
Н.
Головні
вектори сил інерції
![]() та
та![]() ,
головні моменти
,
головні моменти![]() та
та![]() враховують вплив прискореного руху
ланок. Знак “─” у формулах означає, що
сила
враховують вплив прискореного руху
ланок. Знак “─” у формулах означає, що
сила![]() направлена протилежно прискоренню
направлена протилежно прискоренню![]() ,
а момент
,
а момент![]() -протилежно
кутовому прискоренню
-протилежно
кутовому прискоренню![]() .
Моменти сил інерції
.
Моменти сил інерції![]() та
та![]() замінюємо парами сил, які прикладені в
кінцевих кінематичних парах відповідної
ланки і спрямовані перпендикулярно
вісі відповідної ланки.
замінюємо парами сил, які прикладені в
кінцевих кінематичних парах відповідної
ланки і спрямовані перпендикулярно
вісі відповідної ланки.
Вага ланок буде:
![]() Н;
Н;
![]() Н;
Н;
![]() Н.
Н.
4.2. Силовий аналіз групи Ассура (2 - 3)
Для силового дослідження механізму застосовують графоаналітичний та аналітичний методи. Широке розповсюдження набув кінетостатичний метод силового аналізу, який базується на принципі Даламбера. Суть цього методу: якщо до зовнішніх сил, які діють на ланки механізму додати сили інерції та моменти сил інерції ланок, то системою всіх цих сил можна розглядати таку, що знаходиться в стані рівноваги. За цієї умови геометрична сума векторів усіх сил, що діють у механізмі буде дорівнювати нулю, а невідомі сили можуть бути визначені методами статики.
Від’єднаємо
заключну групу механізму та креслимо
ії в масштабі 1
(2-3) (рис. 1.7). Докладаємо до ланок групи
сили ваги G2
та G3,
сили інерції Фi2
та Фi3
(напрямок
прикладання їх у бік, протилежний
напрямку прискорення центру ваги. Точка
прикладання цих сил – центр ваги ланки).
Докладаємо моменти сил інерції, замінюючи
їх парами сил
![]() та
та![]() ;
;![]() та
та![]() .
.
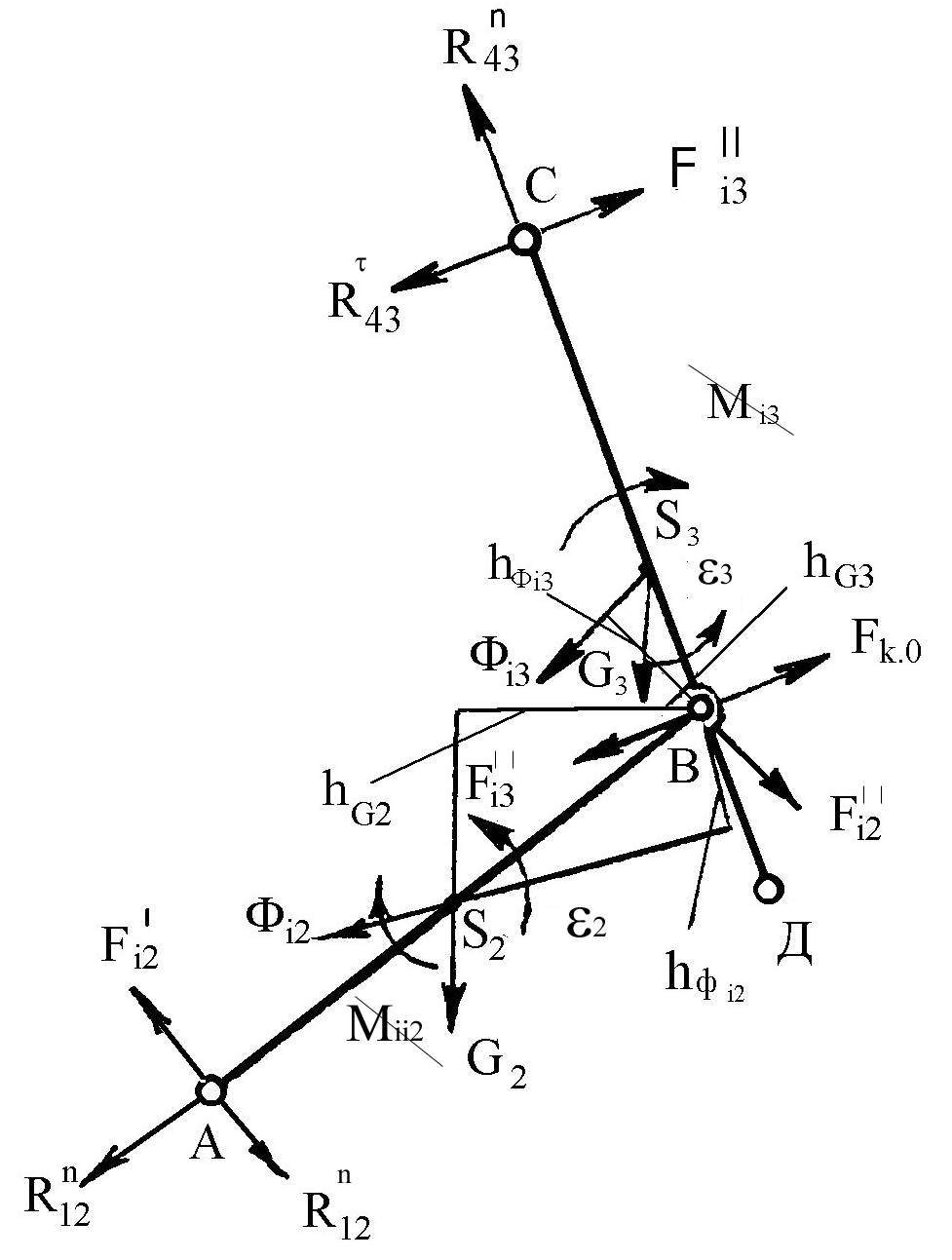
Рис. 1.7
Додаємо
силу корисного опору Fко
у т. В
протилежно вектору швидкості
![]() точки В.
точки В.
Дію зруйнованих зв’язків кінематичних пар А та С замінюємо реакціями R12 та R43 .
Умовно зображаємо всі сили відрізками довжиною 20 мм. Оскільки напрямок цих реакцій невідомий, то замінюємо їх складовими, напрямки яких обираються довільно.
![]() ;
;
![]() .
.
Тангенціальну
складову
![]() знаходимо з рівняння рівноваги моментів
сил, діючих на ланкуАВ
відносно точки В.
знаходимо з рівняння рівноваги моментів
сил, діючих на ланкуАВ
відносно точки В.
МВ=0
![]() ,
,
де
![]() та
та![]() -
плечі дії сил – перпендикуляри, які
опущені з точки В на лінію дії відповідної
сили:
-
плечі дії сил – перпендикуляри, які
опущені з точки В на лінію дії відповідної
сили:
![]() .
.
Значення АВ, hG2, hФi2 беремо безпосередньо з малюнка (рис. 1.7) в мм:
![]() .
.
Тангенціальну складову R43 знаходимо з рівняння рівноваги моментів сил, діючих на ланку ВС відносно точки В.
![]() ;
;
![]() .
.
Значення ВС, hG3, hФi3 беремо безпосередньо з малюнка (рис. 1.7) у мм.
![]() .
.
Нормальні
складові
![]() та
та![]() знайдемо побудовою замкненого
багатокутника сил, що відповідає рівнянню
рівноваги сил у векторній формі.
знайдемо побудовою замкненого
багатокутника сил, що відповідає рівнянню
рівноваги сил у векторній формі.
![]() .
.
Будуємо план сил. Для цього з довільно обраної точки –рF –полюсу плану сил - відкладаємо одну за одною всі відомі сили в такій послідовності: спочатку відомі сили другої ланки, потім відомі сили третьої ланки, а наприкінці невідомі сили третьої та другої ланок (рис.1.8).
Побудову плану сил виконуємо в масштабі:
![]() Н/мм.
Н/мм.
Проведемо
вектори сил (рис.1.8.)
![]() ;
;![]() ;
;![]() ;
;![]() ;
;![]() ;
; ;
;![]() в сторону дії відповідної сили, при чому
довжину векторів визначаємо в масштабі
в сторону дії відповідної сили, при чому
довжину векторів визначаємо в масштабі![]() ,
тобто
в мм:
,
тобто
в мм:
![]() ;
;![]() ;
;![]() ;
;
![]() ;
;
![]() ;
;![]() .
.
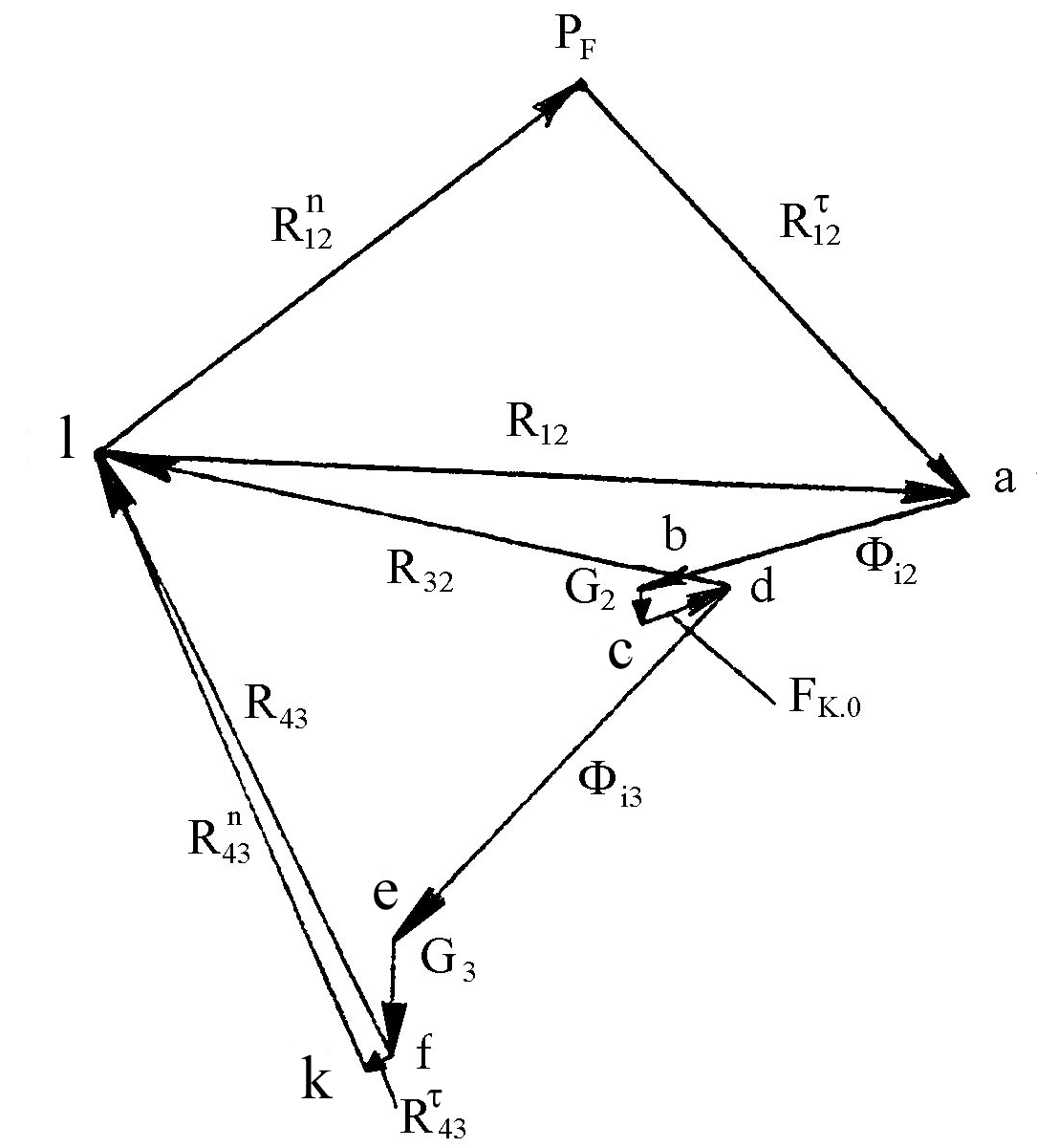
Рис. 1.8
Відклавши
останню відому силу
![]() з т.рF
та точки К
проведемо перпендикуляри, позначаючи
напрямок нормальних складових реакцій
з т.рF
та точки К
проведемо перпендикуляри, позначаючи
напрямок нормальних складових реакцій
![]() та
та![]() .
Точку перетину цих перпендикулярів
позначимо т.l.
З'єднаємо точку f
та точку l
– отримаємо реакцію
.
Точку перетину цих перпендикулярів
позначимо т.l.
З'єднаємо точку f
та точку l
– отримаємо реакцію
![]() у масштабіF,
а точку l
та точку а
– реакцію
у масштабіF,
а точку l
та точку а
– реакцію
![]() у масштабіF:
у масштабіF:
![]() H.
H.
![]() H;
H;
![]() H;
H;
![]() H;
H;
Невідому
реакцію
![]() знайдемо замкнувши багатокутник сил,
тобто, з’єднавши точкуd
з точкою l
плану сил.
знайдемо замкнувши багатокутник сил,
тобто, з’єднавши точкуd
з точкою l
плану сил.
![]() H.
H.