

Лабораторна робота №2 Дослідження впливу зворотного зв’язку в системі “тиристорний перетворювач – двигун” (тп-д)
Мета роботи:розрахувати параметри системи ТП-Д, отримати характеристики і порівняти результати дослідження за відсутності та наявності зворотного зв’язку за швидкістю.
Основні теоретичні відомості
Для підвищення точності регулювання швидкості застосовуються замкнуті системи регулювання зі зворотним зв’язком за швидкістю. Структурна схема електропривода за системою ТП-Д зі зворотним зв’язком за швидкістю представлена на рис. 5. Тиристорний перетворювач будемо розглядати як безінерційну ланку з передаточним коефіцієнтом кп.
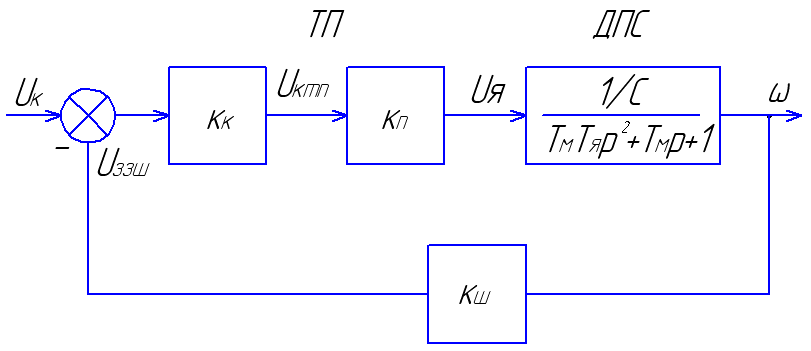
Рис. 5. Структурна схема електропривода ТП-Д
Передаточна функція за керуючим сигналом, складена за схемою рис. 5, буде
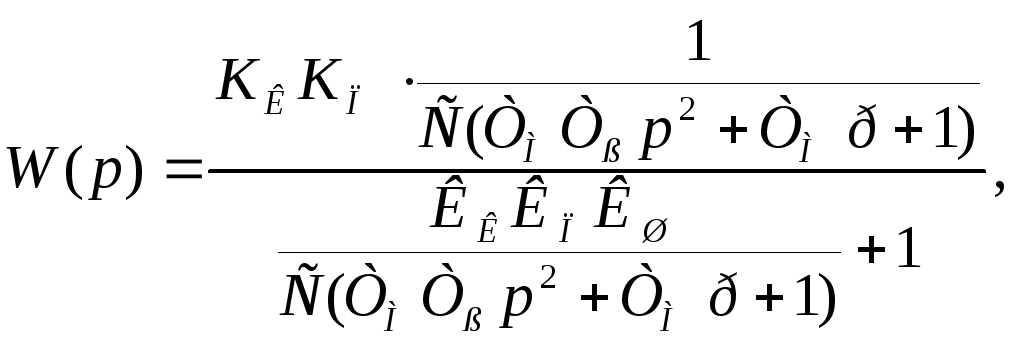 (9)
(9)
де ![]() –
коефіцієнт підсилення керуючого сигналу;
–
коефіцієнт підсилення керуючого сигналу;
![]() –
коефіцієнт тиристорного перетворювача;
–
коефіцієнт тиристорного перетворювача;
![]() –
коефіцієнт зворотного зв’язку за
швидкістю.
–
коефіцієнт зворотного зв’язку за
швидкістю.
Позначимо
![]() – коефіцієнт підсилення розімкнутої
системи (при розриві зворотного зв’язку
за швидкістю). Тоді після перетворень
одержимо
– коефіцієнт підсилення розімкнутої
системи (при розриві зворотного зв’язку
за швидкістю). Тоді після перетворень
одержимо
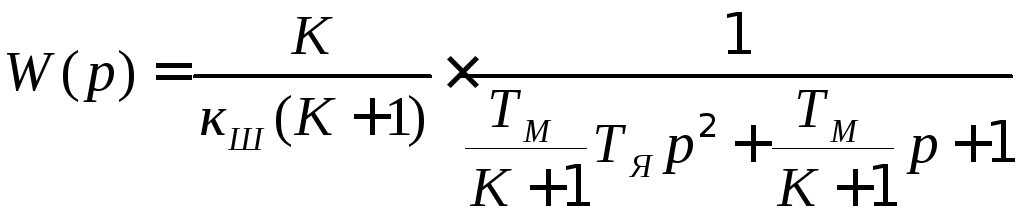 . (10)
. (10)
Передаточна функція показує, що в замкнутій за швидкістю системі регулювання електромеханічна постійна часу Тм, що характеризує інерційність механічної частини електропривода, ніби зменшується в(К+1)раз. Це пов’язано з тим, що жорсткість механічних характеристик β у замкнутій системі збільшується в(К+1)разів.
Зазвичай електромеханічна величина часу Тмбільша, ніж4Тяі в розімкнутій системі регулювання швидкості в часі перехідних процесів коливання не спостерігаються. Уведення від’ємного зворотного зв’язку за швидкістю зменшує еквівалентну електромеханічну постійну часу, причому чим більше коефіцієнт зворотного зв’язкуКш, тим меншийТм.екв. Тому в замкнутих за швидкістю системах регулюванняТм.еквстає меншим, ніж4Тяі перехідні процеси в електроприводі набувають коливальною характеру. Для зниження коливань у систему регулювання вводяться коригувальні ланки.
Приклад дослідження
Визначити, який характер будуть мати перехідні процеси в електроприводі ТП-Д із розімкнутою і замкнутою за швидкістю системами регулювання.
Дані привідного двигуна постійного струму візьмемо з попередньої роботи.
Дані по системі керування: Uкзмінюється від 0 до 10 В; зміні напруги тиристорного перетворювача від 0 до 300 В лінійно відповідає зміна напруги, яка подається на систему керування ТП, – від 0 до 30 В; коефіцієнт зворотного зв’язку за швидкістюКш = 0,09 В·с.
Для заданої системи робимо наступні розрахунки.
Електромагнітна постійна часу якірного ланцюга за формулою (3)
![]()
Електромеханічна постійна часу за формулою (4)
![]()
Коефіцієнт підсилення підсилювача кппру розімкнутій системі
![]() (11)
(11)
де ![]() – номінальна напруга на якорі двигуна;
– номінальна напруга на якорі двигуна;
![]() – номінальна напруга керування
тиристорним перетворювачем (ТП);
– номінальна напруга керування
тиристорним перетворювачем (ТП);
![]() – напруга керування ТП;
– напруга керування ТП;
![]() – номінальна напруга керування.
– номінальна напруга керування.
![]()
Напруга керування ТП ![]()
![]() , (12)
, (12)
де ![]() – напруга керування;
– напруга керування;
![]() – коефіцієнт підсилення перетворювача.
– коефіцієнт підсилення перетворювача.
![]() .
.
Коефіцієнт підсилення ТП
![]() (13)
(13)
Коефіцієнт підсилення підсилювача Кппзу замкнутій системі регулювання знайдемо зі співвідношення
![]() (14)
(14)
![]() (15)
(15)
де
![]() –
коефіцієнт підсилення замкнутої системи;
–
коефіцієнт підсилення замкнутої системи;
– коефіцієнт зворотного зв’язку;
![]() –
номінальна кутова швидкість двигуна.
–
номінальна кутова швидкість двигуна.
![]()
Коефіцієнт підсилення розімкнутої системи
![]() (16)
(16)
Еквівалентна електромеханічна постійна часу Тм.екву замкнутій за швидкістю системі
![]() (17)
(17)
У розімкнутій системі регулювання
![]() (18)
(18)
![]()
Це означає, що перехідний процес буде монотонним, має аперіодичний характер.
У замкнутій за швидкістю системі регулювання
![]() (19)
(19)
![]()
Це свідчить, що перехідний процес має коливальний характер із затуханням.
Змоделюємо обидва випадки і подивимося, чи відповідають графіки перехідних процесів зробленим висновкам.

Рис. 6. Модель електропривода ТП-Д
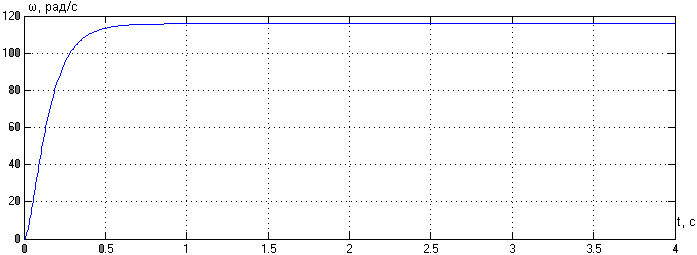
Рис. 7. Графік перехідного процесу за відсутності зворотного зв’язку за швидкістю
Для визначення якості перехідного процесу визначимо час регулювання і перерегулювання.
Згідно з джерелом [8] перерегулювання
![]() (20)
(20)
де ![]() – максимальне значення сигналу;
– максимальне значення сигналу;
![]() – значення сигналу після перехідного
процесу.
– значення сигналу після перехідного
процесу.
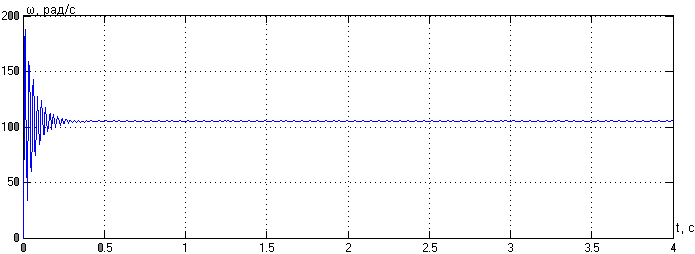
Рис. 8. Графік перехідного процесу за наявності зворотного зв’язку за швидкістю
Дослідимо вплив зворотного зв’язку на зміну швидкостів електроприводі ТП-Д при постійному моменті навантаження.
Параметри двигуна використаємо ті, що і в попередньому дослідженні, але передаточну функцію лінеаризованого двигуна замінимо на динамічну модель ДПС.
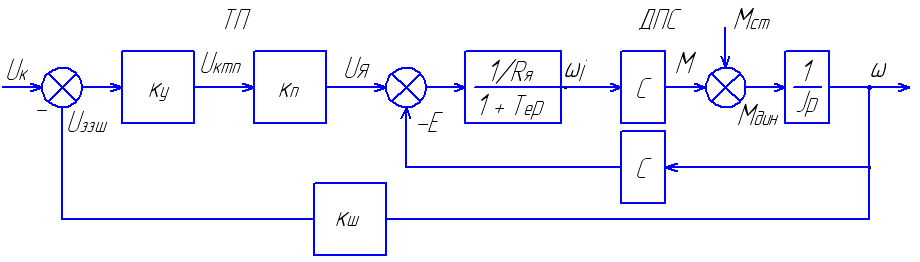
Рис. 9. Структурна схема електропривода ТП-Д
Модель системи представлена на рис. 10.

Рис. 10. Модель електропривода ТП-Д
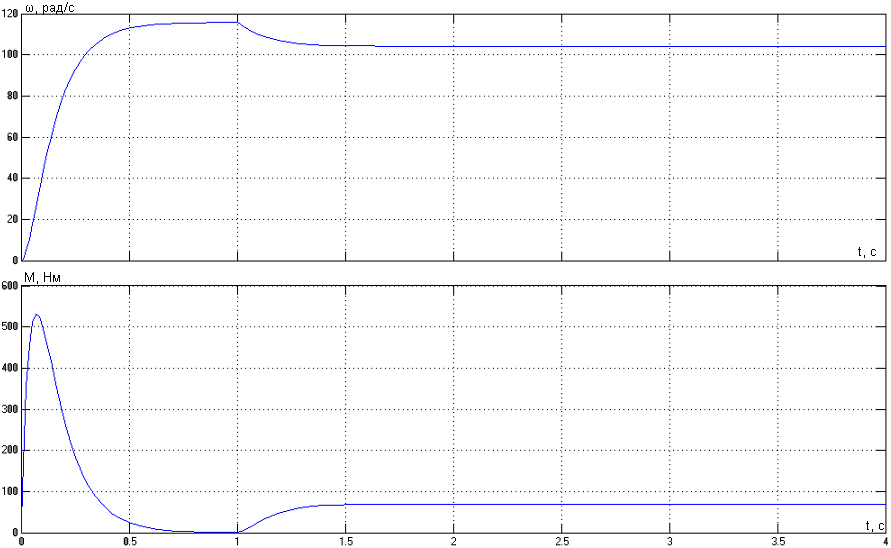
Рис. 11. Характеристика електропривода за відсутності зворотного зв’язку за швидкістю
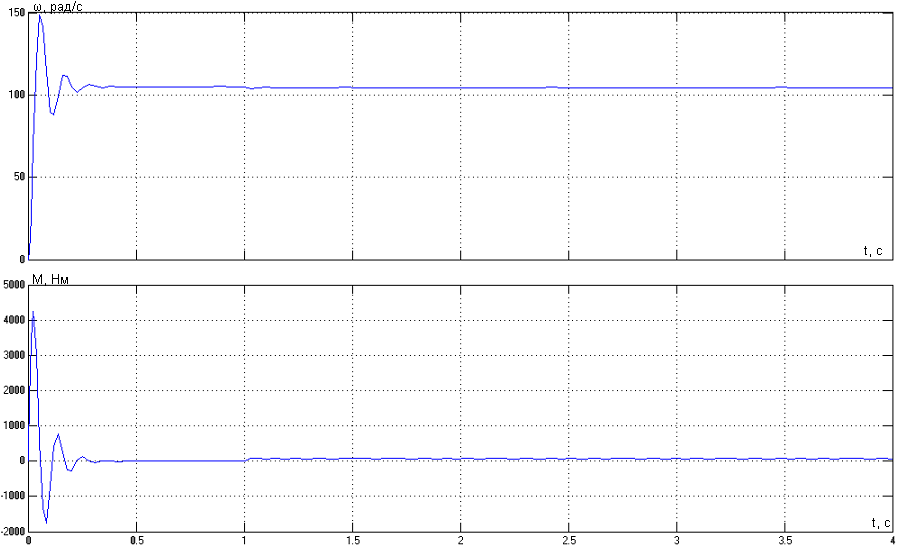
Рис. 12. Характеристика електропривода за наявності зворотного зв’язку за швидкістю
Час регулювання за відсутності зворотного зв’язку за швидкістю
![]()
Перерегулювання за відсутності зворотного зв’язку за швидкістю
![]() .
.
Час регулювання за наявності зворотного зв’язку за швидкістю
![]() с.
с.
Перерегулювання за наявності зворотного зв’язку за швидкістю
![]()