

Приклад дослідження
Розрахунок виконаний в ефективних
значеннях змінних. Параметри двигуна
подані в лабораторній роботі №4. Оскільки
в прикладі не ставиться завдання
використання конкретних елементів
системи керування електроприводом,
прийняті такі спрощення: коефіцієнт
передачі перетворювача рівний одиниці
(![]() ),
так само, як і коефіцієнти зворотних
зв’язків (
),
так само, як і коефіцієнти зворотних
зв’язків (![]()
![]() ).
Таке спрощення не вплине на характер
перехідних процесів і позначиться
тільки на розрахованих значеннях
коефіцієнтів регуляторів та сталих
значеннях величин, тому що передаточні
функції розімкнутих контурів залишаться
при цьому відповідними стандартним
налаштуванням. Результати розрахунку
параметрів регуляторів при прийнятих
допущеннях зведені в таблицю 13.
).
Таке спрощення не вплине на характер
перехідних процесів і позначиться
тільки на розрахованих значеннях
коефіцієнтів регуляторів та сталих
значеннях величин, тому що передаточні
функції розімкнутих контурів залишаться
при цьому відповідними стандартним
налаштуванням. Результати розрахунку
параметрів регуляторів при прийнятих
допущеннях зведені в таблицю 13.
Таблиця 13
Розрахунок параметрів регуляторів
|
№ |
Параметри |
Розрахунок |
|
1 |
Коефіцієнт підсилення і постійна часу ПІ регулятора струму при
(
|
|
|
2 |
Коефіцієнт підсилення та постійна часу ПІ регулятора потоку при
|
|
|
3 |
Коефіцієнт підсилення І-регулятора моменту при
|
|
|
4 |
Коефіцієнт регулятора швидкості при
|
|
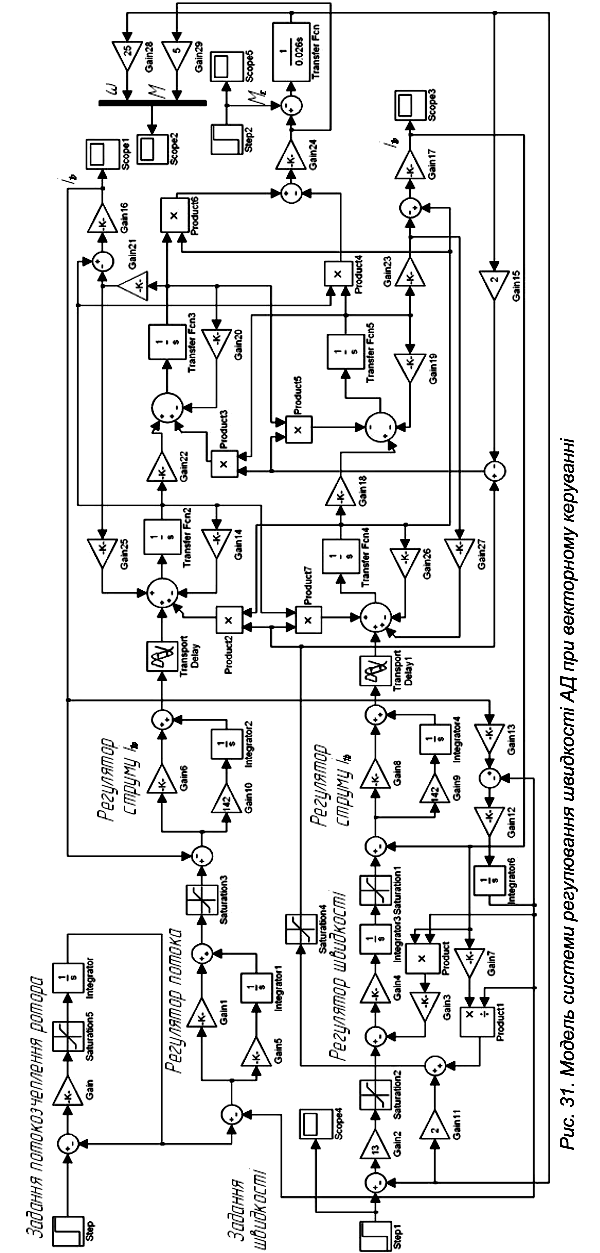
Розрахунки перехідних процесів виконані за структурною схемою (рис. 30). Модель представлена на рис. 31. Субсистема, яка до неї входить, являє собою структурну схему моделі асинхронного двигуна при довільному повороті обертової системи координат α-β щодо просторових векторів.
В елементах схеми, що належать до моделі потоку, розрахунки виконуються за наступними формулами.
Ефективне значення потокозчеплення ротора (93)
![]()
Електромагнітний момент двигуна (94)
![]()
Частота роторної ЕРС (95)

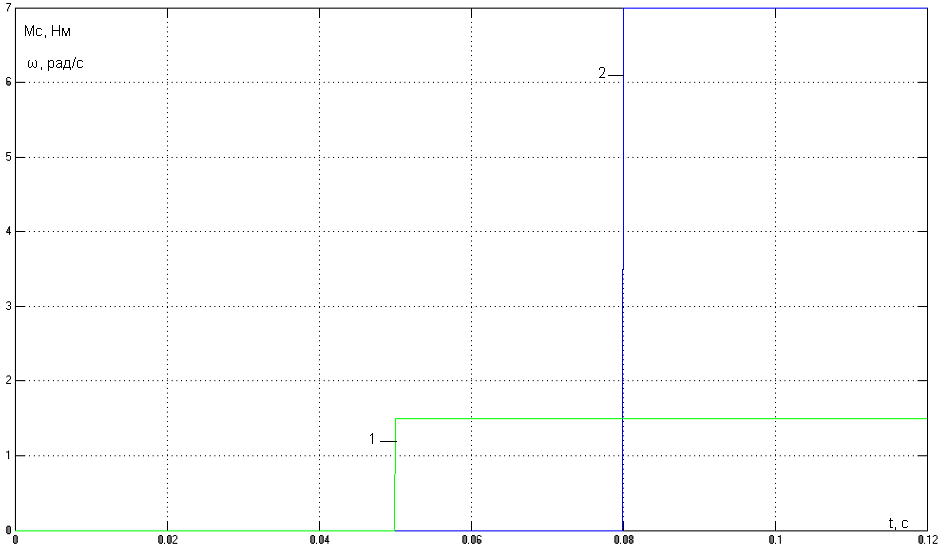
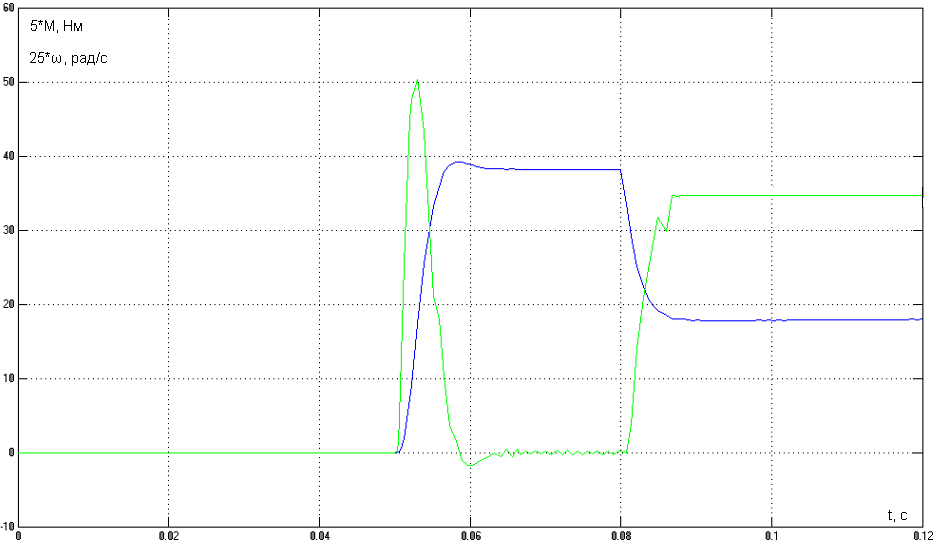
На рис. 32 показані перехідні процеси в
системі при зовнішніх впливах, значення
яких обрані настільки малими, що не
приводять до обмеження вихідних сигналів
регуляторів моменту і струму по поперечній
осі (![]() ).
У момент часу t = 0,01с через задатчик
інтенсивності, що забезпечує плавне
наростання сигналу, на вхід контура
регулювання потоку подається сигнал
завдання номінального потокозчеплення
ротора. У момент часу 0,05 с, коли потік
уже установився, на вхід контура швидкості
приходить східчастий вплив.
).
У момент часу t = 0,01с через задатчик
інтенсивності, що забезпечує плавне
наростання сигналу, на вхід контура
регулювання потоку подається сигнал
завдання номінального потокозчеплення
ротора. У момент часу 0,05 с, коли потік
уже установився, на вхід контура швидкості
приходить східчастий вплив.
а
б
Рис. 32. Перехідні процеси в системі регулювання швидкості при малих вхідних впливах
Дійсне завдання швидкості рівне 1,5
рад/с. При ![]() стрибкоподібно збільшується момент
навантаження від значення, рівного
нулю, до номінального, рівного приблизно
7 Н·м. З наведених осцилограм видно, що
перехідні процеси практично відповідають
налаштуванню на МО. Значне падіння
швидкості при поданні навантаження
пояснюється тим, що при настроюванні
на МО застосований пропорційний регулятор
швидкості. Для зручності використані
зазначені на осцилограмах масштабні
коефіцієнти.
стрибкоподібно збільшується момент
навантаження від значення, рівного
нулю, до номінального, рівного приблизно
7 Н·м. З наведених осцилограм видно, що
перехідні процеси практично відповідають
налаштуванню на МО. Значне падіння
швидкості при поданні навантаження
пояснюється тим, що при настроюванні
на МО застосований пропорційний регулятор
швидкості. Для зручності використані
зазначені на осцилограмах масштабні
коефіцієнти.
Порядок виконання роботи
Вибрати асинхронний двигун змінного струму з таблиці 9 згідно із заданим варіантом.
Скласти модель ситеми векторного керування АД за допомогою математичного моделювання в середовищі SIMULINK програмного пакета MATLAB.
Дослідити динамічні режими в системі регулювання швидкості при векторному керуванні асинхронним двигуном.
Проаналізувати отримані результати.
Скласти звіт.