

МАШИНИ ПОСТІЙНОГО СТРУМУ
.pdfE d |
|
d(Blx) |
Bl dx |
Bl sin(B ) . |
(3.1) |
|
dt |
||||||
dt |
|
dt |
|
|
Напрямок ЕРС визначається правилом правої руки (рис. 2.1, б): вектор В уходить у відкриту долоню, відігнутий під 90˚ великий па-
|
|
|
|
|
|
|
|
|
|
|
лець показує напрямок руху прові- |
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
дника, тоді |
чотири |
пальці долоні |
|||||
|
|
|
|
|
|
N |
|
Е |
вказують напрямок ЕРС, що індуку- |
|||||||||
|
|
|
|
|
В |
|
|
|
|
ється. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
Принцип дії двигуна постійно- |
|||||||||||
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
го струму ґрунтується на законі |
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
електромагнітної |
|
|
сили |
Ампера |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
(2.10) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.2) |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
F B l |
I sin(B I ) . |
||||||
|
|
|
|
|
|
S |
|
|
|
|
Напрямок сили F визначається пра- |
|||||||
|
|
|
|
|
|
|
|
|
|
вилом лівої руки (рис. 2.1, а): |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
Iн |
|
|
|
|
в долоню лівої руки входять лінії |
||||||||
|
|
|
|
|
|
|
|
|
магнітного поля, напрямок 4-х па- |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
льців указує |
напрямок струму, |
то |
||||||
|
|
RH |
а) |
|||||||||||||||
|
|
|
|
|
|
|
відігнутий під кутом |
90˚ |
великий |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
Iн |
|
|
|
|
палець указує напрямок дії сили. |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Якщо |
провідну |
рамку, |
що |
||||
|
|
|
|
|
|
|
|
|
|
t |
обертається, |
помістити в однорідне |
||||||
|
|
|
|
|
|
|
|
|
|
|
поле, то в ній буде індукуватися |
|||||||
|
|
|
|
|
|
|
|
|
|
|
змінна ЕРС (це синхронний генера- |
|||||||
|
|
|
|
|
|
б) |
|
|
|
|
тор із частотою f) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f p |
n , |
|
(3.3) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.2. Синхронний генера- |
60 |
|
де р – число пар магнітних по- |
||
тор (а) та змінний струм у |
||
люсів; |
||
навантаженні (б) |
||
n – швидкість обертів рамки, |
||
|
об/хв.
Струм, що проходить у навантаженні Rн, – змінний (рис. 3.2, б). Якщо замість R H до СГ підключити змінну напругу, то в рамці проходитиме
струм, котрий за законом Ампера (2.9) створює обертальний момент. Згідно із законом оберненості електричних машин ми отримали синхронний генератор, частота обертання якого жорстко пов‟язана з частотою напруги живлення
11

|
N |
|
b |
a |
Iр |
|
|
+ |
|
|
c |
Iн |
d |
|
|
– |
|
|
|
S |
|
Rн |
|
|
а) |
|
I |
|
Iн |
|
|
|
|
|
t |
|
б) |
Ip |
|
|
Рис. 3.3. Генератор постійного струму (а) та залежність струмів у рамці Ip і в навантаженні Iн від часу (б)
n 60f |
, об/хв. |
(3.4) |
p |
|
|
Для того щоб машину змінного струму перетворити на машину постійного струму, більше ніж 150 років тому винайшли електромеханічний випрямляч (колектор), котрий складається із щіток і двох півкілець (у Росії в 1834 р. академік Б.С. Якобі створив ДПС)
(рис. 3.3, а).
Тоді в навантаженні R H проходитиме
пульсуючий струм Iн , але в одному напрямку (рис. 3.3, б).
Таким чином, ми отримали ГПС. Якщо замість R H підключити постійну
напругу, то в рамці з‟явиться постійний обертальний момент (хоча струм у ній буде змінний Iр) і генератор перетвориться на двигун постійного струму
(ДПС).
Отже, роль колектора й щіток у ГПС зводиться до випрямлення змінного струму, що наводиться в рамці при обертанні Iр, у пульсуючий струм постійного напрямку Iн у навантаженні Rн.
3.2. Влаштування машин постійного струму
Конструкція МПС складається із: статора (8), ротора (якоря) (5), колектора (3) із щітками (4), підшипникових щитів (2, 9), на яких кріпиться якір (5) (рис. 3.4).
На статорі розташовані головні полюси (ГП) (6) із котушками збудження (7), котрі створюють постійне робоче магнітне поле й додаткові полюси (ДП), що знаходяться між головними полюсами і служать для зменшення іскріння під щітками (рис. 3.5).
12

Рис. 3.4. Будова машин постійного струму
Осердя полюсів статора виконують шихтованими з анізотропної холоднокатаної листової сталі марки 3411, котра має підвищені магнітні властивості вздовж прокату (анізотропна) для зменшення втрат від вихрових струмів. Листи окисляють, товщина листа становить 1–2 мм.
|
|
|
|
|
ГП |
Полюси з котушками кріпляться до ста- |
|
|
|
|
|
тора болтами. Робочий магнітний потік про- |
|
|
|
|
|
|
||
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
ходить через полюси, корпус статора і ротор. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
До статора кріпляться два бокових щити (2, 9) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ДП |
з підшипниками (12) та лапи (11) для закріп- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
лення МПС. |
||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
На валу (1) посаджене осердя якоря (5), у |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рис. 3.5. Головні (ГП) та |
котрому знаходяться пази. В пазах розташо- |
|||||||||||||||
вана обмотка якоря, кінці обмоток якоря при- |
||||||||||||||||
додаткові (ДП) полюси |
||||||||||||||||
паяні до колектора (3). Колектор – найбільш |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
складний вузол МПС. Він складається із трапецеїдальних мідних пластин, закріплених у формі циліндра на валу. В малопотужних МПС пластини колектора заливаються в пластмасу, в потужних МПС – кріпляться через ізоляцію за допомогою виступів у формі “ластівчиного хвоста”. В кожній пластині колектора до “півника” припаяні виводи обмоток якоря.
13

Осердя якоря також шихтоване, листи ізольовані лаком. До колектора
(3) прилягає щітковий вузол (4). Сила притиснення щіток до колектора регулюється пружинами. Сила притиснення щіток не повинна бути малою, бо збільшиться іскріння, і не має бути великою (швидко зітреться щітка).
На підшипниковому щиті розташоване оглядове вікно, через яке можна оглянути колекторно-щітковий вузол, не розбираючи машини.
Щітки – прямокутні бруски, виготовлені з порошків графіту, вугілля, домішок металу і спресовані та обпалені при температурі t 2000 ˚C. Через щітки подається напруга в обмотку рухомого ротора.
Щітки бувають 6-ти видів: вугільно-графітні, графітні, електрографітовані, мідно-графітні, бронзо-графітні, срібляно-графітні.
3.3. Обмотки якоря МПС
Якорем будь-якої електричної машини називається вузол (статор або ротор), в обмотці якого проходить струм навантаження. Наприклад, в обмотці ротора МПС протікає струм навантаження, тому в них якір – це ротор. У потужних синхронних гідрогенераторах струм навантаження проходе у нерухомих обмотках статора, тому в них якір – це статорна обмотка.
Розрізняють 5 видів обмоток якоря МПС:
|
|
|
|
|
|
|
|
y1 |
|
|
y2 |
|
|
|
|
|
|
S |
y1 |
|
|
N |
N |
|
|
|
|
S |
|
N |
|
|
S |
|
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
||||||
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
||||
|
3 |
4 |
5 |
|
|
|
|
|
|
|
|
|
|
|
|||
1 y 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
y2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
1 |
2 |
3 |
4 |
|
5 |
|
|
yк |
|
|
|
|
|
|
|
|
+ |
yк |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
– |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
+ |
|
|
|
|
|
|
|
б) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.6. Розгорнуті схеми петльової (а) та хвильової (б) обмоток: у1 – перший крок; у2 – другий крок; у – результуючий крок;
ук – крок по колектору
1)петльова (або паралельна); 2) хвильова (або послідовна); 3) складна
–петльова; 4) складна – хвильова; 5) комбінована (або жаб‟яча).
Обмотки якоря завжди зображають розгорнутими схемами. Вони майже завжди двошарові, тобто одна сторона витка обмотки кладеться на
14

дно паза й на розгорнутій схемі позначається пунктирною лінією, друга сторона витка кладеться поверх і зображується суцільною лінією (рис. 3.6). Пази ротора на розгорнутих схемах позначають кружечками із порядковим номером.
Частина витка, що лежить у пазу якоря, називається пазовою стороною, а частина витка, яка лежить зовні паза якоря і з‟єднує дві пазові сторони, – лобовою частиною витка.
Дві пазові сторони, закорочені лобовою частиною з виводами на колекторі пластини, називаються секцією (рис. 3.7). У секції може бути 1, 2, 3 і більше витків. Число витків у секції позначається w C . Для того щоб
|
|
|
|
|
|
|
|
|
|
ЕРС, що наводяться в двох сторонах секції, склада- |
|
|
|
|
|
|
|
|
|
|
лися, необхідно, щоб відстань між сторонами секції |
|
|
|
|
|
|
|
|
|
|
(чи витка) була рівною полюсному діленню або ма- |
|
|
|
|
|
|
|
|
|
|
ло відрізнялася від нього. Відстань між провідника- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ми одного витка (секції) називають першим кроком |
|
|
|
|
|
|
|
|
|
|
обмотки та позначають у1. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Відстань між кінцем даної секції і початком на- |
|
|
|
|
|
|
|
|
|
|
ступної, з якою вона з’єднується на одній пластині |
Рис. 3.7. Секція |
колектора, називають другим кроком обмотки й по- |
|||||||||
обмотки якоря |
значають у2. |
|||||||||
|
|
|
|
|
|
|
|
|
|
Знання або завдання першого і другого кроків |
у1 та у2 ще не говорить про те, яка буде обмотка: петльова чи хвильова. Ця невизначеність усувається, якщо задати результуючий крок у.
Відстань між початками двох секцій (витків), розташованих одна над одною в обмотці, називають результуючим кроком і позначають у.
Для простої петльової обмотки завжди у 1.
Якщо у = + 1 (використовують) – правоходова, що не перехрещується, коли у = -1 – лівоходова, що перехрещується.
Відстань між двома колекторними пластинами, до яких приєднується початок і кінець витка (секції), називають кроком по колектору й позначають ук. Для простої петльової обмотки завжди ук = у = 1. Завдання чотирьох кроків у, у1, у2, ук повністю визначає вид обмотки якоря.
Перший крок обмотки якоря y1 повинен бути рівний чи мало відрізнятися від полюсного ділення
|
D |
|
|
2 pa , |
(3.5) |
де Da – зовнішній діаметр ротора.
Якірна обмотка характеризується такими параметрами:
S – число секцій;
Z – кількість реальних (фізичних) пазів; wc – число витків у секції;
15

W – загальна кількість витків у обмотці; |
|
|
|
|||
S |
n |
Ze – число елементарних пазів, |
|
|
|
|
|
Z |
|
|
|
||
що припадає на один паз (фізичний) |
|
|
|
|||
(рис. 3.8); |
Sn = 1 |
S = 2 |
Sn = 3 |
|||
N – кількість пазових сторін в обмотці; |
||||||
n |
|
|||||
K – число колекторних пластин; |
Рис. 3.8. Фізичні та елементарні |
|||||
Zе – кількість елементарних пазів. |
||||||
пази обмотки якоря |
||||||
|
|
Дві активні сторони різних секцій, |
|
|
|
|
що розташовані в пазу одна над одною, утворюють елементарний паз. |
||||||
|
|
Для обмоток справедливі такі співвідношення: |
|
|
||
|
|
|
W N S w Z |
|
w ; |
S |
|
|
Ze |
; |
|
|
|
||
|
|
|
|
n |
|
|
|
|
|||||||
|
N |
|
2 |
|
c |
e |
c |
|
|
Z |
N |
|
(3.6) |
||
S |
; |
N 2w Z |
|
2w S Z ; |
|
|
K S |
Z |
. |
||||||
|
e |
|
|
|
|||||||||||
|
2wc |
c |
c |
|
n |
|
|
|
|
|
2wc |
e |
|||
|
|
|
|
|
|
|
|
|
|
|
|
||||
Число колекторних пластин K завжди дорівнює числу S секцій і кількості елементарних пазів Ze , тобто K S Ze .
Кроки обмоток звичайно виражають числом елементарних пазів Ze. При цьому не враховують, що відстань між елементарними пазами, які знаходяться в сусідніх реальних пазах, більша, ніж проміжок між елементарними пазами в реальному пазу.
Співвідношення для розрахунку кроків обмоток, котрі випливають із рис. 3.6 та (3.3), наведені у таблиці 3.1.
Число – це таке максимально мале число, щоб крок у1 був цілим числом.
Приклад розрахунку простої петльової обмотки
Дано: Ze K S 16, Z 8 (число реальних пазів), 2р = 4.
Розрахувати параметри простої петльової обмотки. Розв‟язок
Із (3.7) маємо:
Перший крок дорівнює у1 2pZe 164 4 , 0.
Загальний крок та крок по колектору y yê 1.
Другий крок дорівнює у2 = у1 – у = 4 – 1 = 3.
Тоді число елементарних пазів, що припадає на один реальний: Sn ZZe 168 2 пази.
16

|
|
|
|
|
|
|
|
|
|
|
|
|
Таблиця 3.1 |
||
|
Формули для розрахунку кроків обмотки |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вид обмотки |
Проста петльова |
Проста хвильова |
|
||||||||||||
Крок |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Перший частковий крок |
y |
|
Z |
e |
|
y |
Z |
e |
|
|
|
||||
|
|
|
|
||||||||||||
|
|
|
|
|
|
||||||||||
y1 |
|
|
|
|
|
|
|||||||||
|
1 |
|
2 p |
1 |
|
2 p |
|
|
|
||||||
Результуючий крок у: |
y |
yк 1 |
y y |
|
|
Zе 1 |
(3.7) |
||||||||
крок по колектору ук |
к |
|
|
p |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||
Другий частковий крок |
y2 |
y1 y |
y2 y y1 |
|
|||||||||||
у2 |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Число пар паралельних |
|
a p |
|
a 1 |
|
|
|
||||||||
гілок |
а |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Число елементарних па- |
Ze – парне |
Ze – непарне |
|
||||||||||||
зів ze |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Розгорнута схема простої петльової обмотки зображена на рис. 3.9. Щітки по відношенню до полюсів нерухомі і повинні розташовувати-
ся так, щоб у секціях індукувалася максимальна ЕРС. Вони завжди розміщені напроти полюсів (хоча пази, з якими вони в контакті, знаходяться на геометричній нейтралі) і їх кількість дорівнює числу полюсів. Відстань між щітками дорівнює полюсному діленню.
Струм, що проходить в обмотці МПС I a , складається із суми струмів у паралельних гілках
|
|
|
|
|
|
Ia 2aIan , |
(3.8) |
|
де 2а – число паралельних гілок; Ian – струм у паралельній гілці. |
|
|||||||
Приклад розрахунку простої хвильової обмотки |
|
|||||||
Дано: 2р = 4, К = Ze = 13. |
|
|
|
|
||||
|
|
|
|
|
|
Розв‟язок |
|
|
Із (3.7) маємо: y = у |
|
|
к 1 |
|
|
13 1 |
6 пазів; |
|
к |
|
|
|
|||||
|
|
р |
2 |
|
|
|||
|
|
|
|
|
||||
у1 Z2pe 134 3,25 0,25 3пази; у2 = у - у1 = 6 – 3 = 3 пази.
Розгортка схеми простої хвильової обмотки якоря зображена на рис. 3.10.
17
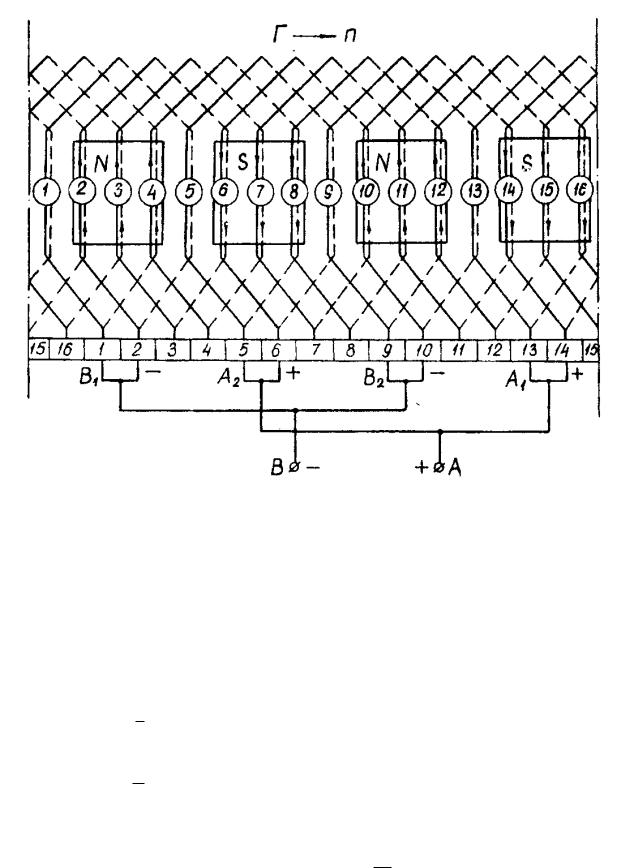
Рис. 3.9. Розгорнута схема простої петльової обмотки якоря для Ze=16; 2р=4
3.4. Умови симетричності обмоток якоря
Обмотку якоря називають симетричною, якщо її паралельні гілки ма-
ють однакові опори і в них наводяться однакові ЕРС:
1.Кожна пара паралельних гілок обмотки повинна складатися з однакового числа секцій: Sa ЦЧ (ціле число) (умова рівності опорів).
2.Секції кожної пари паралельних гілок мають займати на якорі однакову кількість пазів: Za ЦЧ (ціле число) (умови 2 і 3 – умови рівності ЕРС у
паралельних гілках).
3. Кожна пара паралельних гілок обмотки повинна займати однакове положення відносно системи головних полюсів: 2aр ЦЧ (ціле число).
18
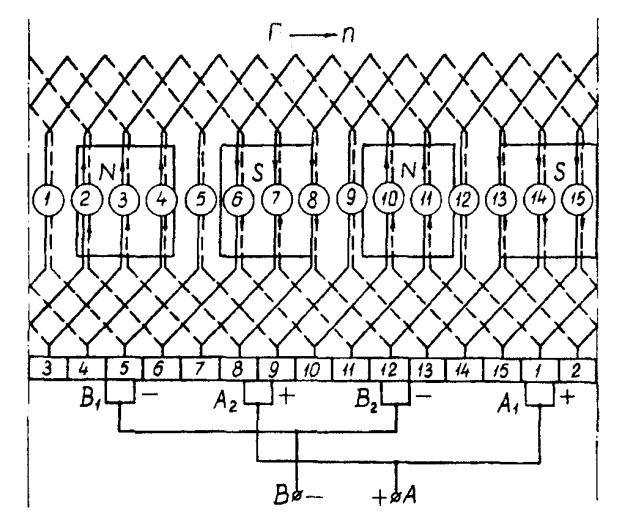
Рис. 3.10. Розгорнута схема простої хвильової обмотки якоря для Ze=15; 2p=y
3.5. Вибір обмотки якоря для МПС
Проста петльова обмотка використовується в машинах середньої потужності нормальної напруги і великої потужності підвищеної напруги, а складна петльова обмотка – в машинах малої потужності особливо низької напруги й у машинах великої потужності пониженої та нормальної напруги.
Проста хвильова обмотка застосовується в машинах малої потужності й у машинах середньої потужності підвищеної і високої напруги, а складна хвильова обмотка – в машинах середньої потужності підвищеної напруги.
Змішана обмотка використовується в машинах великої потужності.
19

При цьому орієнтовно вважається, що до машин постійного струму малої потужності належать машини до 50 кВт, середньої потужності – від 50 до 500 кВт і великої потужності – від 500 кВт та більше. До машин постійного струму особливо низької напруги належать машини до 24 В, пониженої напруги – від 24 до 150 В, нормальної – від 150 до 500 В, підвищеної і високої – 500 В та вище.
4. Електрорушійна сила обмотки якоря
ЕРС, що індукується в одному пазовому провіднику, дорівнює (2.14) |
|||||||||
|
|
|
|
|
|
Епр В і , |
(4.1) |
||
|
1 |
B |
|
де |
В |
– індукція в |
повітряному |
||
|
|
проміжку МПС; і – розрахункова дов- |
|||||||
|
|
|
|||||||
bi |
|
|
жина провідника; – колова швидкість |
||||||
|
2 |
провідника (ротора). |
|
|
|||||
|
|
|
|
||||||
|
|
|
|
У МПС повітряний проміжок між |
|||||
|
|
полюсом і статором рівномірний. |
|||||||
|
|
|
|||||||
|
|
|
|
Для спрощення реальне криволі- |
|||||
Рис. 4.1. Розподілення індукції |
нійне розподілення індукції B |
головно- |
|||||||
го |
полюса |
заміняється |
прямокутним |
||||||
головного полюса: 1– реальне; |
|||||||||
(рис. 4.1). Площі, що займаються розра- |
|||||||||
2 – розрахункове |
|
|
|||||||
|
|
хунковим прямокутником (2), |
і площа |
||||||
|
|
|
|||||||
|
|
|
реальної трапеції (1) рівні. |
|
|
||||
У розгляд уводиться коефіцієнт полюсного перекриття |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
bі |
, |
(4.2) |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
і |
|
|
|
||
|
|
bm |
|
|
|
де bi – розрахункова полюсна дуга го- |
|||||||
|
ловного полюса, яка дорівнює |
||||||||||||
bі bm 2 , |
(4.3) |
||||||||||||
|
|
|
|
|
|
|
|||||||
|
|
|
Da |
|
де bm – фізична ширина головного |
||||||||
|
|
|
полюса; δ – повітряний проміжок між по- |
||||||||||
2 |
|
|
|||||||||||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
люсом та ротором (рис. 4.2). |
|
|||||
|
|
|
|
|
|
|
За межами полюсної дуги bі вважаєть- |
||||||
Рис. 4.2. Головний полюс |
ся, що поля В немає і ЕРС у провідниках не |
||||||||||||
наводиться. |
|
|
|
|
|
||||||||
із ротором |
|
|
|
|
|
||||||||
Розрахункова довжина |
провідника в |
||||||||||||
|
|
|
|
|
|
|
|||||||
обмотці якоря обчислюється за формулою |
|
|
|
|
|
||||||||
|
|
|
|
|
|
і |
0,5 m , |
|
|
|
|
(4.4) |
|
20