

1.2 Характеристики двигунів та механізмів.
Сталий рух електроприводу і його стійкість Для розрахункової схеми стале механічний рух ЕП відповідатиме рівності моментів двигуна і навантаження, тобто умові М = Мc. Перевірка виконання цієї умови зазвичай проводиться за допомогою так званих механічних характеристик двигуна і виконавчого органу, які широко використовуються також при вирішенні і інших завдань в теорії і практиці ЕП.

Механічною
характеристикою двигуна називається
залежність його швидкості від розвиваючого
моменту w(М)
або зусилля V (F). Розрізняють природну
і штучну характеристики двигунів.
Природна
характеристика двигуна (вона в нього
єдина) відповідає основній (паспортній)
схемі його включення і номінальним
параметрам 
напруги
живлення. Приклади природних механічних
характеристик двигунів обертального
руху наведено на рис. 2.5, а. На природній
характеристиці розташовується точка
номінального (паспортного) режиму
двигуна з координатами Wном,
Мном.
Якщо
двигун включений не за основною схемою,
або в його електричному ланцюзі включені
будь-які додаткові електротехнічні
елементи ( резистори, реактори,
конденсатори), або ж двигун живиться
напругою з неномінальними параметрами,
то двигун буде мати характеристики,
звані штучними. Таких характеристик у
двигуна може бути як завгодно багато.
Оскільки ці характеристики отримують
з метою регулювання змінних (координат)
двигуна - струму, моменту, швидкості,
положення, то вони іноді називаються
регулювальними.
Штучні характеристики двигуна і способи
їх отримання докладно розглядаються
далі.
Механічною
характеристикою виконавчого органу
називається залежність швидкості його
руху від зусилля або моменту на ньому,
тобто Wво(Мво)
при
обертальному русі і
Vво
(Fво)
при поступальному
русі . У результаті операції приведення
ці характеристики перетворюються на
залежність виду з W
(Мс) , де W-швидкість
двигуна, а Мс-приведений до його валу
момент навантаження. Приклади механічних
характеристик деяких виконавчих органів
наведені на рис. 1.1, б. Відзначимо, що
реальні механічні характеристики
виконавчих органів складніші за видом
і звичайно являють собою поєднання
показаних на рис.1.1, б залежностей.
За
характером дії моменти навантаження
Мс діляться на активні і реактивні.
Активний момент має постійне, не залежне
від швидкості напряму своєї дії. Такі
моменти створюються так званими
потенційними силами - силами тяжіння
землі (характеристика 7 вантажопідіймального
механізму на рис.1.1, б), силами пружної
деформації і т. д.
Реактивний
момент, характеристика якого відповідає
залежності 6 на рис.1.1, б, створюється в
основному силами тертя, завжди протидіє
руху і тому змінює свій знак зі зміною
напрямку руху.
Кількісно
механічні характеристики двигуна і
виконавчого органу оцінюються жорсткістю
β=dM/dw= M/
M/ w
w
Використовуючи
цей показник, можна оцінювати характеристики
1 синхронного двигуна на рис.1.1, а
(горизонтальна лінія) як абсолютно
жорстку (β=∞), характеристику асинхронного
двигуна 3 – яка має змінну жорсткість,
характеристики 7 -яка має нульову
жорсткість (β = 0) і т. д.
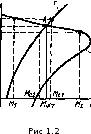
Введене
поняття механічних характеристик
дозволяє просто і зручно виконати
перевірку умови сталого руху. Для цього
в одному і тому ж квадраті поєднуються
характеристики двигуна 1 і виконавчого
органу 2, як це показано на рис. 1.2. Точка
А перетину цих
характеристик,
в якій моменти двигуна і виконавчого
органу рівні, і буде відповідати сталому
руху зі швидкістю
Wуст
і моментом Муст.
Залежно
від виду механічних характеристик
двигуна і виконавчого органу визначається
усталена стійкість руху.
Під
стійкістю розуміється властивість
системи «двигун - виконавчий орган
»підтримувати рух зі швидкістю Wуст
при
можливих невеликих відхиленнях від
неї. Розглянемо
спосіб визначення стійкості руху за
допомогою механічних характеристик.
Припустимо,
що з якоїсь причини швидкість ЕП
підвищилася до рівня Wуст.
З'ясуємо, що буде відбуватися зі
швидкістю, якщо викликавша її зміни
причина зникне. З
характеристик двигуна і виконавчого
органу видно, що при швидкості W1
момент навантаження Мc1
більше моменту двигуна M1
тобто М1
<Мc1.
Тоді
відповідно у системі «двигун - виконавчий
орган» буде діяти негативний динамічний
момент. Розпочнеться процес гальмування
(dw/dt<0),
який закінчиться при швидкості Wуст.
Розглянемо тепер становище, коли
короткочасне
обурення викликало зниження швидкості
до рівня W2
< Wуст.
У цьому випадку М2> Мc2
і під дією вже позитивного динамічного
моменту
швидкість почне зростати, поки не досягне
рівня сполучення. 
Таким
чином, система «двигун - виконавчий
орган» із зображеними на рис. 1.2
механічними
характеристиками володіє властивістю
повертатися до швидкості усталеного
руху при можливих відхиленнях від неї,
тобто
рух в такій системі є стійким.
Перевірка
на стійкість руху може бути виконана
аналітично, з використанням поняття
жорсткості характеристик. Рух буде
стійкий
при виконанні умови
β-βс<0 або β<βc
де β і βс- відповідно жорсткості механічних характеристик двигуна та виконавчого органу.