Контрольные вопросы:
Чем обусловлены случайные и систематические ошибки.
Как производится вычисление погрешностей при прямых и косвенных измерениях.
Что называется плотностью вещества.
В каких приборах используется линейный нониус.
Как производятся измерения штангенциркулем, микрометром и на технических весах.
Лабораторная работа № 1-1 Определение ускорения свободного падения
Цель работы: исследование колебательного движения математического маятника, расчет ускорения свободного падения.
Оборудование:
Математический маятник переменной длины;
Секундомер;
Линейка (или мерная лента).
Краткая теория
Математическим
маятником
называется система, состоящая из
невесомой нерастяжимой нити длиной l,
на которой подвешена материальная точка
массы
![]() .
.
Если
маятник отклонить от положения равновесия
на некоторый угол
![]() (см. рис. 1) и предоставить ему свободно
двигаться, то под действием двух сил
(силы тяжести
(см. рис. 1) и предоставить ему свободно
двигаться, то под действием двух сил
(силы тяжести![]() и силы натяжения нити
и силы натяжения нити![]() )
маятник будет колебаться около положения
равновесия (силой сопротивления со
стороны воздуха будем пренебрегать).
)
маятник будет колебаться около положения
равновесия (силой сопротивления со
стороны воздуха будем пренебрегать).
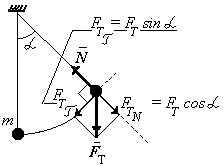
Рис. 1.
Математический маятник
Разложим силу тяжести на две составляющие по двум взаимно перпендикулярным направлениям:
вдоль нити:
|
|
(1) |
перпендикулярно к ней (по касательной к траектории, т.е. к окружности):
|
|
(2) |
Тангенциальная
составляющая силы тяжести
![]() определяет тангенциальную составляющую
ускорения
определяет тангенциальную составляющую
ускорения
![]() :
:
![]()
|
|
(3) |
|
|
(4) |
Знак
"–" свидетельствует о том, что
направления тангенциальной составляющей
ускорения противоположно по знаку
угловому смещению маятника
![]() из положения равновесия.
из положения равновесия.
Смещение
маятника из положения равновесия можно
характеризовать как величиной угла
отклонения от положения равновесия
![]() ,
так и длиной дугиS
(траектория
движения материальной точки является
дугой окружности радиуса
,
так и длиной дугиS
(траектория
движения материальной точки является
дугой окружности радиуса
![]() ).
Если угол
).
Если угол
![]() выражен в радианах,
то
выражен в радианах,
то
|
S
|
(5) |
и, следовательно
|
|
(6) |
для малых углов, выраженных в радианах
|
|
(7) |
и из (6) – (7) следует:
|
|
(8) |
Ускорение
является второй производной от смещения,
т.е.
![]() ,
поэтому:
,
поэтому:
|
|
(9) |
Введем обозначение:
|
|
(10) |
Подставляя (10) в (9) , получим уравнение движения математического маятника, являющееся однородным дифференциальным уравнением второго порядка:
|
|
(11) |
Решение этого уравнения может быть представлено в виде:
|
|
(12) |
или
|
|
(13) |
(в этом можно убедиться, непосредственно подставляя (12) в (11)).
Таким образом, колебание маятника является гармоническим (т.е. смещение маятника от положения равновесия меняется с течением времени по закону синуса или косинуса). В формулах (12), (13):
А – амплитуда колебания (модуль наибольшего отклонения колеблющейся величины от равновесного значения S =0);
T – период колебания (время, за которое совершается одно полное колебание);
= 1/ T – частота колебаний (число колебаний в единицу времени);
= 2 Т – циклическая (угловая, круговая) частота (число колебаний за 2 секунд) ;
= t + 0 – фаза колебания (выражение, стоящее под знаком синуса или косинуса). Фаза однозначно определяет при заданной амплитуде в любой момент времени значение колеблющейся величины.
0 – начальная фаза колебания (при t = 0). Слово "фаза" – греческого происхождения, означает ступень, стадию развития какого–либо явления: по значению фазы можно определить, какая часть периода прошла от момента начала колебания: = 2t / T (при 0 = 0). Откуда t = T/(2) .
Таким
образом,
период колебаний маятника T =
![]() ; где, согласно (10),
; где, согласно (10),![]() .
Или
.
Или
|
T
= 2 |
(14) |
где l – длина математического маятника, g – ускорение свободного падения.
Таким образом, при малых начальных отклонениях от положения равновесия период колебаний математического маятника определяется только его длиной и ускорением свободного падения и не зависит от его массы, а также от начального отклонения от положения равновесия.
С
другой стороны , T
=
![]() , где t
– время
N
полных
колебаний. Эти соотношения могут быть
использованы для расчета ускорения
свободного падения:
, где t
– время
N
полных
колебаний. Эти соотношения могут быть
использованы для расчета ускорения
свободного падения:
|
|
(15) |
Если
измерение длины маятника затруднено,
это осложнение легко обойти, измерив
периоды колебаний Т1
и Т2
и разность
длин маятников (![]() –
–
![]() )
в этих экспериментах:
)
в этих экспериментах:
|
T1
= 2 |
(16) |
Отсюда
|
g
= 4
|
(17) |