

УстрАСУ / Конспект УАСУ
.pdfсопротивлениями), так и генераторные (с изменяющейся ЭДС). Дифференциальные схемы включения параметрических датчиков показаны на рис. 2.8 (а — датчик включен в один контур; б
— датчик включен в оба контура). ЭДС, питающие оба контура, одинаковы. Дифференциальная схема включения генераторного датчика показана на рис. 2.9. В этой схеме датчиком является так называемый дифференциальный трансформатор (подробно рассмотрен в § 6.4). При изменении магнитной связи между обмотками трансформатора ЭДС левого контура, например, возрастает, а правого — уменьшается. Изменение магнитной связи обусловлено контролируемой неэлектрической величиной. Например, оно может быть вызвано перемещением ферромагнитного сердечника в дифференциальном трансформаторе.
Проведем сравнение дифференциальной и мостовой измерительных схем по чувствительности. В обеих схемах (рис. 2.10, а, 6) будем использовать одинаковые датчики с изменяющимся активным сопротивлением  и одинаковое питание — от вторичной обмотки трансформатора с ЭДС, равной
и одинаковое питание — от вторичной обмотки трансформатора с ЭДС, равной (при дифференциальной схеме имеется выводот средней точки).
(при дифференциальной схеме имеется выводот средней точки).
Для расчета токов в дифференциальной схеме используем метод наложения: сначала определим токи от одной ЭДС, затем — от другой (рис. 2.11).
Ток через прибор для расчетной схемы (рис. 2.11, а)
Токчерез прибор для расчетной схемы (рис. 2.11, б)
Результирующий ток через прибор
Определение чувствительности дифференциальной схемы в общем виде приводит к довольно сложному уравнению, поэтомурассмотрим числовой пример. Пусть E=10 В; R= 10 Ом;  =0,1 Ом; Rпр=0,5 Ом. Тогда
=0,1 Ом; Rпр=0,5 Ом. Тогда
21

Таким образом, при одинаковых напряжениях питания, сопротивлениях датчика и измерительного прибора, приращениях сопротивления датчика дифференциальная схема дает большее приращение тока в измерительной цепи. Следовательно, дифференциальная измерительная схема имеет большую чувствительность, чем мостовая схема.
Ток в измерительной цепи мостовых и дифференциальных схем зависит от напряжения питания. Колебания напряжения питания . приводят к появлению погрешности, так как ток через прибор и отклонение его стрелки изменяются даже при неизменном сопротивлении датчика.
Для уменьшения влияния напряжения питания на показания прибора используют так называемые логометрические схемы измерения. Логометром называется магнитоэлектрический прибор, противодействующий момент в котором создается не механически (пружиной), а электрически. На рис. 2.12 приведена принципиальная схема логометра для измерения сопротивления датчика Яд, В
магнитном поле постоянного магнита |
с |
полюсными |
наконечниками |
NS помещен |
стальной |
|||||
|
цилиндрический сердечник. В зазоре междусердечником иполюсными |
|||||||||
|
наконечниками помещены две обмотки wi и а>2, выполненные в виде |
|||||||||
|
рамок. При прохождении тока по рамке создается вращающий момент |
|||||||||
и |
рамка поворачивается. Зазор сделан неравномерным, чтобы вращающий |
|||||||||
намо- |
момент изменялся в зависимости от угла поворота. Обмотки o»i и а>2 |
|||||||||
таны так, чтобы моменты рамок были направлены навстречу друг другу. |
||||||||||
Рамки |
жестко соединены между собой под определенным углом. Вместе они |
|||||||||
могут |
поворачиваться одновременно с закрепленной на рамках стрелкой |
|||||||||
|
прибора. Токи к рамкам подводятся с помощью спиральных пружин, |
|||||||||
|
которые создают малый противодействующий момент, возвращающий |
|||||||||
рамки |
истрелкувисходноеположение, когда тока в приборе нет. |
|
|
|||||||
|
Датчик |
включен |
последовательно с обмоткой |
, постоянный |
||||||
|
резистор |
R |
— последовательно |
с |
обмоткой . |
Если |
со- |
|||
противления |
и R равны, то токи в рамках также равны ( |
) и |
подвижная система (обе рамки |
|||||||
со стрелкой) |
займет положение, симметричное |
относительно |
оси |
полюсов |
NS. |
Если |
же |
|||
сопротивление датчика изменится (например, увеличится), то ток /i уменьшится и уменьшится момент  , создаваемый этим током в рамке i0j. Так как ток
, создаваемый этим током в рамке i0j. Так как ток и соответствующий ему момент
и соответствующий ему момент остался неизменным, то результирующий момент повернет подвижную систему на некоторый угол. При этом рамка
остался неизменным, то результирующий момент повернет подвижную систему на некоторый угол. При этом рамка с большим током входит в расширяющийся зазор с меньшей индукцией, а рамка wi с меньшим током, наоборот, входит в сужающийся зазор с большей индукцией. Момент
с большим током входит в расширяющийся зазор с меньшей индукцией, а рамка wi с меньшим током, наоборот, входит в сужающийся зазор с большей индукцией. Момент будет уменьшаться, а
будет уменьшаться, а —увеличиваться. При определенном угле поворота моменты сравниваются и подвижная система займет новое равновесное положение. Если же изменится напряжение питания цепи U, то в рамках
—увеличиваться. При определенном угле поворота моменты сравниваются и подвижная система займет новое равновесное положение. Если же изменится напряжение питания цепи U, то в рамках  и
и изменятся токи, притом одновременно и в одинаковой степени (так как рамки подключены к источнику питания параллельно). Соотношение токов и моментов останется неизменным и положение подвижной системы не изменится. Как видно, на положение стрелки влияют не сами токи, а их отношение, которое определяется сопротивлением
изменятся токи, притом одновременно и в одинаковой степени (так как рамки подключены к источнику питания параллельно). Соотношение токов и моментов останется неизменным и положение подвижной системы не изменится. Как видно, на положение стрелки влияют не сами токи, а их отношение, которое определяется сопротивлением
22
датчика и не зависит от напряжения питания.
§2.6.Компенсационныеизмерительныесхемы
Компенсационные схемы используют для измерения неэлектрических величин, которые преобразуются датчиками в ЭДС или напряжение. Сигнал датчика сравнивается с компенсирующим напряжением, вырабатываемым потенциометром. Подбор компенсирующего напряжения выполняется вручную или автоматически.
Приборы с автоматической компенсацией называют также авто- |
|
||||
матическими потенциометрами. |
|
|
|
||
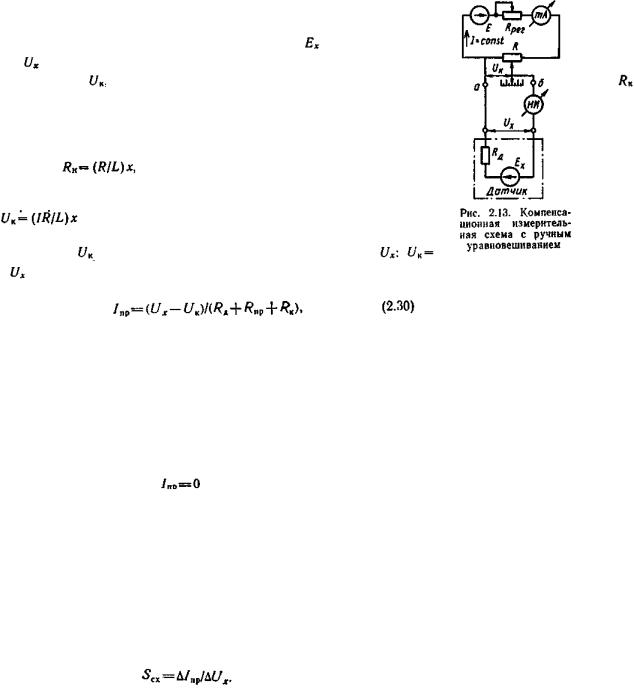
Рассмотрим простейшую компенсационную схему (рис. 2.13) с |
ручным |
||||
уравновешиванием. |
Измеряемая |
ЭДС или |
напряже- |
|
|
ние уравновешиваются |
равным и противоположным |
по знаку |
|
||
напряжением , снимаемым с переменного проволочного резис- |
тора . |
||||
Этот резистор имеет два неподвижных вывода и один подвижный, |
|
||||
выполненный в виде щетки, скользящей по проволоке. Все |
|
||||
сопротивление резистора R включено в цепь источника питания с |
ЭДС Е. |
||||
Переменное сопротивление RK пропорционально перемещению х |
движка |
||||
(щетки): |
, где L — общая длина проволочной намотки |
между |
|||
неподвижными выводами. Соответственно и компенсирующее |
|
||||
напряжение |
UK будет пропорционально |
перемещению |
движка х |
ЭДС Е. |
|
|
, где / — ток, проходящий через резистор R под действием |
||||
Движок необходимо перемещать до тех пор, пока компенсирующее |
|
||||
напряжение |
не сравняется с измеряемым напряжением |
|
|||
= , Для определения положения точной компенсации используется |
|
||||
чувствительныйприбор(гальванометр или микроамперметр). Токчерез прибор |
|
||||
где —сопротивление датчика;
—сопротивление датчика; —сопротивление прибора.
—сопротивление прибора.
Если компенсация произошла, то ток через прибор равен нулю: Значит, прибор в данном случае нужен не для измерения тока, а для определения его нулевого значения. Поэтому такой прибор называют нуль-индикатором (НИ). О значении измеряемого напряжения можно судить по перемещению движка, т. е. движок можно соединить со стрелкой, а вдоль резистора R расположить шкалу, проградуировав ее в единицах напряжения или сразу в единицах той неэлектрической величины, котораяпреобразуется датчиком в ЭДС
Значит, прибор в данном случае нужен не для измерения тока, а для определения его нулевого значения. Поэтому такой прибор называют нуль-индикатором (НИ). О значении измеряемого напряжения можно судить по перемещению движка, т. е. движок можно соединить со стрелкой, а вдоль резистора R расположить шкалу, проградуировав ее в единицах напряжения или сразу в единицах той неэлектрической величины, котораяпреобразуется датчиком в ЭДС или в напряжение
или в напряжение
Отметим также, что при компенсационном методе измерения  Действительно,
Действительно, , но в момент компенсации
, но в момент компенсации
Точность измерения при компенсационном методе зависит от стабильности поддержания тока / в цепи питания резистора R. Ведь именно от силы этого тока зависит значение компенсирующего напряжения Если ЭДС источника питания Е уменьшилась (из-за разряда аккумулятора или батарейки), то уменьшится и ток L Для компенсации придется на большее расстояние х переместить движок резистора
Если ЭДС источника питания Е уменьшилась (из-за разряда аккумулятора или батарейки), то уменьшится и ток L Для компенсации придется на большее расстояние х переместить движок резистора , и стрелка укажет на иное, ошибочное значение измеряемой величины. Для поддержания стабильного тока питания / можно использовать регулировочный резистор
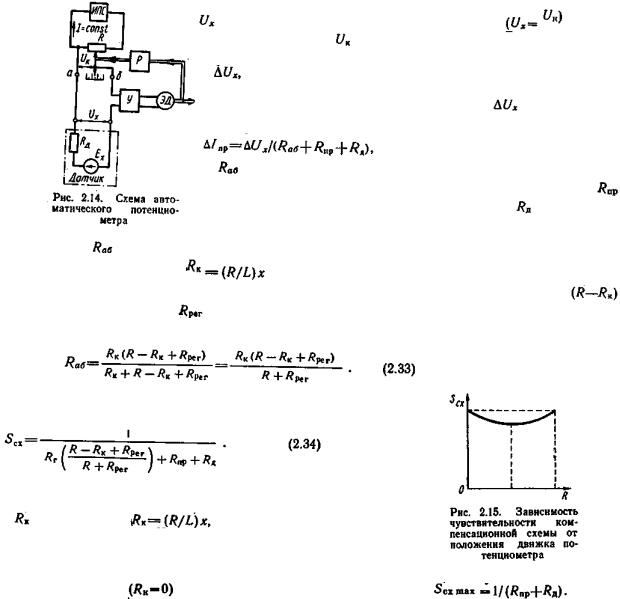
, и стрелка укажет на иное, ошибочное значение измеряемой величины. Для поддержания стабильного тока питания / можно использовать регулировочный резистор  и миллиамперметр или применить источник стабилизированного напряжения, как в автоматическом потенциометре (рис. 2.14).
и миллиамперметр или применить источник стабилизированного напряжения, как в автоматическом потенциометре (рис. 2.14).
Чувствительность компенсационной схемы можно определить как отношение приращения тока через прибор к вызывающему его изменениюизмеряемого напряжения:
(2.31)
23
|
Если достигнуто состояние компенсации, то измеряемое напряжение |
|||||||||
|
уравновешено компенсирующим напряжением |
и ток через |
||||||||
|
прибор |
равен |
нулю. |
Пусть |
измеряемое |
напряжение изменилось |
||||
|
на |
а компенсирующее |
напряжение не изменилось |
(движок |
||||||
|
резистора R неподвижен). В этом случае разность междуизмеряемым |
|||||||||
|
и компенсирующим |
напряжениями равна |
. |
Под действием |
||||||
|
этого напряжения через прибор пройдет ток |
|
|
|
|
|||||
|
|
|
|
(2.32) |
|
|
|
|
|
|
|
где —внутреннее |
сопротивление |
электрической цепи |
питания, |
||||||
|
замеренное на зажимах а—б |
при |
отключенном |
датчике; |
— |
|||||
|
сопротивление прибора (нуль-индикатора); |
|
—сопротивление |
|||||||
|
датчика. |
|
|
|
|
|
|
|
|
|
Сопротивление |
можно представить |
как |
параллельное |
соединение |
части |
сопротивления |
||||
компенсирующего резистора |
|
|
|
|
|
|
|
|
|
|
с сопротивлением, состоящим из оставшейся части компенсирующего резистора |
|
и |
||||||||
регулировочного |
резистора |
|
|
|
|
|
|
|
|
|
Подставив (2.32) и (2.33) в (2.31), получим выражение для чувствительности компенсационной схемы:
Анализ формулы (2.34) показывает, что чувствительность схемы |
зависит |
||||
от , а так как |
то чувствительность |
зависит от |
|
||
положения |
движка |
х. Чувствительность непостоянна в разных |
точках |
||
шкалы. На рис. 2.15 показана зависимость чувствительности от |
|
||||
положения |
движка |
компенсирующего резистора. |
В |
начальном |
|
положении |
движка |
чувствительность |
максимальна: |
В среднем |
|
положении движка чувствительность минимальна, что необходимо учитывать при точных измерениях ЭДС.
Компенсационный метод измерения применяется в цепях как постоянного, так и переменного токов. Однако потенциометры переменного тока дают меньшую точность измерения и сложнее, поскольку необходимо компенсировать падение напряжения не только по абсолютной величине, но и по фазе. Это требует одновременного регулирования не менее двух параметров для обеспечения полной компенсации. На практике стремятся упроститьмостпеременного тока, выполняя одну паруплеч мостачисто активными, адругуюпару—изоднотипныхэлементов.
24
ЛЕКЦИЯ 3. КЛАССИФИКАЦИЯ ЭЛЕКТРИЧЕСКИХ ДАТЧИКОВ. КОНТАКТНЫЕ ДАТЧИКИ
§3.1.Типыэлектрическихдатчиков
Электрические датчики относятся к наиболее важным элементам систем автоматики. С помощьюдатчиковконтролируемая или регулируемая величина преобразуется в сигнал, в зависимости от изменения которого и протекает весь процесс регулирования. Наибольшее распространение в автоматике получили датчики с электрическим выходным сигналом. Объясняется это прежде всего удобством передачи электрического сигнала на расстояние, его обработки и возможностью преобразования электрической энергии в механическую работу. Кроме электрических распространение получилимеханические, гидравлическиеипневматические датчики.
В гл. 1 было отмечено, что входным сигналом датчиков могут быть самые различные физические величины: механическое перемещение, скорость, сила, температура, давление, расход, влажность и др. В зависимости от вида входного сигнала различают датчики перемещения, скорости, силы, температуры и др. Это электрические датчики неэлектрических величин. При автоматизации электросетей и электроустановок возникает необходимость в получении сигналов, соответствующих току, напряжению, мощности и другим электрическим величинам. Для этого используют датчики тока, напряжения, мощности и др. В них одна электрическая величина — входной сигнал —преобразуется в другую электрическую величину — выходной сигнал.
По характеру формирования электрического выходного сигнала электрические датчики делятся на параметрические (пассивные) игенераторные (активные). Впараметрических датчикахизменение входного сигнала вызывает соответствующее изменение какого-либо параметра электрической цепи (активного сопротивления, индуктивности, емкости). Генераторные датчики являются источниками электрическойэнергии,зависящейотвходногосигнала.
B данной книге принята классификация электрических датчиков в зависимости от принципа действия или метода, используемого при преобразовании входного сигнала в электрический выходной сигнал. В соответствии с этим электрические датчики подразделяют на контактные, потенциометрические, тензометрические, электромагнитные, пьезоэлектрические, емкостные, термоэлектрические, струнные, фотоэлектрические, ультразвуковыеи др. Надо отметить, что этот ряд непрерывно расширяется — все новые и новые физические явления используются для преобразования входных сигналов с развитием науки, техники, технологии, появлением новых материалов. I По характеру изменения выходного сигнала различают датчики непрерывного (аналогового) и дискретного типа.
Независимо от значения и типа ко всем электрическим датчикам предъявляются определенные технические требования. Основными из них являются надежность, точность, чувствительность,быстродействие, минимальные габариты, масса.
Датчики различают также по диапазону изменения входного сигнала. Очень важно, чтобы диапазон изменения выходного сигнала был при этом одинаков (унифицирован) для разных приборов. Унификация выходных сигналов датчиков позволяет использовать общие усилительные и исполнительные элементы для самых разных систем автоматики.
Основные характеристики датчиков:
1. Диапазон измеряемых значений (Максимальный входной сигнал)
Динамический диапазон внешних воздействий, который датчик может воспринять, называется диапазоном измеряемых значений. Эта величина показывает максимально возможное значение входного сигнала, которое датчик может преобразовать в электрический сигнал, не выходя за пределы допустимых погрешностей. Для датчиков с очень широкой и нелинейной амплитудно-частотной характеристикой (АЧХ) динамический диапазон внешних воздействий часто выражается в децибелах, которые являются логарифмической мерой отношений либо мощности, либо напряжений. Децибелы выражают не абсолютные значения, а только отношения величин. Сигналы отображенные в логарифмическом виде, имеют гораздо меньшие значения, чем исходные, что на практике в ряде случаев бывает очень удобно. Поскольку логарифмическая шкала является нелинейной, сигналы
25
низкого уровня в ней представляются с большим разрешением, тогда как сигналы высокого уровня претерпевают большее сжатие. По определению децибел равен десяти логарифмам отношения мощности двух сигналов. Децибел в двадцать раз превышает логарифмы отношений силы тока и напряжений.
2. Диапазон выходных значений
Диапазон выходных значений — алгебраическая разность между электрическими выходными сигналами, измеренными при максимальном и минимальном внешнем воздействии. В эту величину должны входить все возможныеотклоненияотидеальной передаточной функции.
3. Передаточная функция
Для каждого датчика можно вывести идеальное или теоретическое соотношение, связывающее сигналы на его входе и выходе. Если была бы возможность идеально спроектировать датчик, изготовить его из идеальных материалов и идеальными инструментами, при этом все работы выполнялись бы идеальными работниками, то сигнал на выходе такого датчика всегда бы соответствовал реальному значению внешнего воздействия. Выведенное идеальное соотношение между входным и выходным сигналом можно выразить в виде либо таблицы, либо графика, либо математического выражения. Это идеальное (теоретическое) выражение часто называют передаточной функцией. Передаточная функция устанавливает взаимосвязь между выходным электрическим сигналом датчика и внешним воздействием. Эта функция может быть как линейной, так и нелинейной (например, логарифмической, экспоненциальной или степенной). Во многих случаях передаточная функция является одномерной (те связывает выходной сигнал только с одним внешним воздействием) Одномерную линейную функцию можно представить в виде выражения
S=a + bs,
где а — постоянная составляющая (т е значение выходного сигнала при нулевом входном воздействии), b — наклон прямой, который часто называют чувствительностью датчика. Параметр S — эта та характеристика электрического сигнала, которую системы сбора данных воспринимают в качестве выходного сигнала датчика. В зависимости от свойств датчика это может быть амплитуда, частота или фаза.
Во многих случаях нелинейные датчики могут считаться линейными внутри ограниченного диапазона значений Для более широкого диапазона значений нелинейная передаточная функция представляется в виде отрезков нескольких прямых линий Это называется кусочно-линейной аппроксимацией Для того, чтобы определить, может ли данная передаточная функция быть представлена в виде линейной зависимости, наблюдают за изменением выходных сигналов в линейной и реальной моделях при постепенном увеличении входного сигнала. Если разность сигналов не выходитзадопустимыепределы, передаточную функцию данного датчика можно считать линейной
В случаях, когда на выходной сигнал датчика оказывают влияние несколько внешних воздействий, его передаточная функция становится многомерной.
4. Точность
Точность - очень важная характеристика любого датчика. Правда, когда говорят о точности датчика, чаще всего подразумевают его неточность или погрешность измерений. Под погрешностью измерений, как правило, понимают величину максимального расхождения между показаниями реального и идеального датчиков. Считается, что измеренное значение соответствует реальному с определенной степенью достоверности.
Погрешность датчика можно также представить в виде разности между значением, вычисленным по выходномусигналудатчика, иреальным значением поданного входного сигнала.
Реально любой датчик обладает теми или иными недостатками. Реальная функция почти никогда не совпадает с идеальной. Даже когда датчики изготавливаются в идентичных условиях, изза разницы в материалах, в мастерстве работников, ошибок разработчиков, производственных допусков и т.п., их передаточные функции всегда будут различаться друг от друга. Однако все они не должны выходить за пределы определенной зоны, лежащей в границах предельно допустимых погрешностей.
На точность датчиков влияют такие характеристики как: гистерезис, мертвая зона, параметры калибровки, повторяемость датчиков от партии к партии и воспроизводимость погрешностей, которые
26
будут рассмотрены далее. Предельно допустимые погрешности обычно соответствуют самым худшим рабочим характеристикам датчиков. На практике пределы допустимых погрешностей устанавливаются не вокруг идеальной передаточной функции, а относительно калибровочной кривой. Допустимые пределы становятся меньше, если они не включают в себя погрешности, связанные с различиями датчиков от партии к партии, а также когда они относятся только к одному специально откалиброванному датчику. Все это повышает точность измерении, однако значительно повышает стоимость, из-зачего во многих ситуациях эти методы не могут быть применены.
Погрешностьдатчиковможетбытьпредставленавследующих видах:
1.Непосредственно в единицах измеряемой величины.
2.В процентахот значения максимального входного сигнала.
3.В единицахвыходного сигнала.
В современных датчиках точность часто характеризуется величиной статистической ошибки измерений, учитывающей влияние как систематических, так и случайных погрешностей, и не зависящих от ошибок, допущенныхпри определении передаточных функций.
5. Калибровка
Если производственные допуски на датчик и допуски на интерфейс (схемы преобразования сигналов) превышают требуемую точность системы, всегда необходимо проводить калибровку. В процессе проведения полной калибровки определяются коэффициенты, описывающие передаточную функцию всей системы в целом, включая датчик, интерфейсное устройство и АЦП. Математическое описание передаточной функции необходимо знать до начала проведения калибровки.
Для нелинейных функций калибровкутребуется проводить более чем в двухточках. Количество необходимых калибровок диктуется видом математического выражения. Если передаточная функция моделируется полиноминальной зависимостью, число калибровочных точек выбирается в зависимости от требуемой точности. Поскольку, как правило, процесс калибровки занимает довольно много времени, для снижения стоимости изготовления датчиков на производстве количество калибровочных точек задается минимальным.
6. Ошибка калибровки
Ошибкакалибровки— это погрешность, допущеннаяпроизводителемприпроведениикалибровки датчика на заводе. Эта погрешность носит систематический характер, и, значит, добавляется ко всем реальным передаточным функциям. Ошибка калибровки сдвигает характеристику преобразования датчика в каждой точке на определенную величину. Она необязательно должна быть равномерной во всем диапазоне измерений и может зависеть от типа ошибки, допущенной в процессе калибровки.
7. Гистерезис
Гистерезис — это разность значений выходного сигнала для одного и того же входного сигнала, полученных при его возрастании и убывании. Типичной причиной возникновения гистерезиса является трениеи структурные изменения материалов.
8. Нелинейность
Нелинейность определяется для датчиков, передаточную функцию которых возможно аппроксимировать прямой линией. Под нелинейностьюпонимаетсямаксимальноеотклонение реальной передаточной функции от аппроксимирующей прямой линии. Под термином «линейность» на самом деле понимается «нелинейность».
При проведении нескольких циклов калибровки выбирается худшее из полученных значений нелинейности. Нелинейность обычно выражается либо в процентах от максимального входного сигнала, либо в единицах измеряемых величин.
10. Воспроизводимость
Воспроизводимость - это способность датчика при соблюдении одинаковых условий выдавать идентичные результаты. Воспроизводимость результатов определяется по максимальной разности выходных значений датчика, полученных в двух циклах калибровки. Обычно она выражается в процентах от максимального значения входного сигнала. Причинами плохой воспроизводимости результатовчасто являются:тепловойшум,поверхностные заряды, пластичность материалов и т.д.
11. Мертвая зона
27
Мертвая зона - это нечувствительность датчика в определенном диапазоне входных сигналов В пределах этой зоны выходной сигналостается почтипостоянным ( часто равным нулю).
12. Разрешающая способность
Разрешающаяспособностьхарактеризует минимальноеизменениеизмеряемой величины, которое может почувствовать датчик. При непрерывном изменении внешнего воздействия в пределах диапазона измеряемых значений выходные сигналы датчиков не будут всегда абсолютно гладкими, даже при отсутствии шумов. На них всегда будут видны небольшие ступеньки. Особенно отчетливо это видно в потенци-ометрических датчиках, инфракрасных датчиках контроля территории с сетчатой маской и других устройствах, в которых выходные сигналы меняются только при определенных изменениях внешних воздействий. В дополнение к этому при преобразовании любого сигнала в цифровой код происходит его разбивка на маленькие ступеньки, каждой из которых приписывается конкретное значение. Величина изменения входного сигнала, приводящая к появлению минимальной ступеньки на выходном сигнале датчика при определенных условиях, называется его разрешающей способностью. Следует отметить, что размер ступени может меняться внутри диапазонаизмеряемыхзначений, поэтому, как правило, разрешающая способность определяется либо как средняя, либо как наихудшая величина. Разрешающая способность датчиков с цифровыми выходными сигналами часто задается числом бит слова данных. Например, в описании может быть информация, что разрешение датчика равно 8 бит. Отсюда можно получить либо полный диапазон входных сигналов, либо оценить величину младшего значащего разряда (МЗР). Если на выходном сигнале не удается определить различимых ступеней, говорят, что датчик обладает бесконечно большим разрешением. Термин «бесконечное разрешение» является ошибочным.
13. Специальные характеристики
Для некоторых датчиков необходимо указывать специальные характеристики входных сигналов.
Например,длядетекторовосвещенноститакойхарактеристикойявляется его чувствительностьвпределах ограниченной оптической полосы. Следовательно, для таких датчиков необходимо определять спектральныехарактеристики.
14. Выходной импеданс
Выходнойимпедансявляетсяхарактеристикой, указывающейнасколько легкодатчиксогласовывается с электронной схемой. Сопротивление, соответствующее выходному импедансу датчика, подключаются параллельно сопротивлению, характеризующему входной импеданс электронной схемы, (потенциальное соединение) или последовательно сним (токовоесоединение). Обычно входные и выходныеимпедансы представляются в комплексном виде, поскольку они, как правило, включают в себя активные и реактивные компоненты. Для минимизации искажений выходного сигнала датчик с токовым выходом должен иметь максимально возможный выходной импеданс, а его интерфейсная схема — минимальный входной импеданс. В случае потенциального соединения датчику следует иметь низкий выходной импеданс, аинтерфейсной схеме — высокий входной.
15. Сигнал возбуждения
Сигнал возбуждения — это электрический сигнал, необходимый активному датчику для работы. Сигнал возбуждения описывается интервалом напряжений и/или тока. Для некоторых типов датчиков такженеобходимо указыватьчастотусигналавозбужденияиего стабильность. Выходсигналавозбуждения заприведенныепределы может привести к изменению передаточной функции датчика, и, следовательно,
кискажениювыходного сигнала.
16.Динамические характеристики
В стационарных условиях датчик полностью описывается своей передаточной функцией, диапазоном измеряемых значений, калибровочными коэффициентами и т.д. Однако на практике выходнойсигналдатчиканевсегдадостаточно точно отслеживаетизменениевнешнего сигнала. Причины этого заключаются как в самом датчике, так и в его соединении с источником внешних воздействий, не позволяющем сигналам распространяться с бесконечно большой скоростью Другими словами можно сказать, что любой датчик обладает параметрами, зависящими от времени, называемыми динамическими характеристиками. Если датчик имеет ограниченное быстродействие, он может регистрировать значения внешних воздействий, отличающиеся от реальных. Это означает, что датчик работает с динамической погрешностью. Отличие между статическими и динамическими
28
погрешностями заключается в том, что последние всегда зависят от времени. Если датчик входит в состав измерительного комплекса, обладающего определенными динамическими характеристиками, внесение дополнительных динамических погрешностей может привести, в лучшем случае, к задержке отображения реального значения внешнего воздействия, а, в худшем случае, - к возникновению колебаний.
Время разогрева — это время между подачей на датчик электрического напряжения или сигнала возбуждения и моментом, когда датчик начинает работать, обеспечивая требуемую точность измерений. Многие датчики обладают несущественным временем разогрева. Однако некоторые детекторы, особенно работающие в устройствах с контролируемой температурой (термостатах), для своего разогрева требуют секунды, а то и минуты.
В теории автоматического управления (ТАУ) принято описывать взаимосвязь между входами и выходами устройства в виде линейных дифференциальных уравнений с постоянными коэффициентами. Очевидно, что при решении таких уравнений можно определить динамические характеристики устройства. В зависимости от конструкций датчиков, уравнения, описывающие их, могут иметь разный порядок.
Частотные характеристики напрямую связаны с быстродействием датчика, выражаемого в единицах внешнего воздействия на единицу времени. Какие характеристики: АЧХ или быстродействие, используются для описания датчика, зависит от его типа, области применения и предпочтений разработчика.
Другой способ описания быстродействия заключается в определении времени, требуемого для достижения выходным сигналом датчика уровня 90% от стационарного или максимального значения при подаче на его вход ступенчатого внешнего воздействия. Для датчиков первого порядка очень удобно использовать параметр, называемый постоянной времени. Постоянная времени является мерой инерционности датчика.
Частота среза характеризует наименьшую или наибольшую частоту внешних воздействий, которую датчик может воспринять без искажений. Верхняя частота среза показывает насколько быстро датчик реагирует на внешнее воздействие, а нижняя частота среза — с каким самым медленным сигналом он может работать.
Фазовый сдвиг на определенной частоте показывает насколько выходной сигнал отстает от внешнего воздействия. Сдвиг измеряется либо в градусах, либо в радианах и обычно указывается для датчиков, работающих с периодическими сигналами. Если датчик входит в состав измерительной системы с обратными связями, всегда необходимо знать его фазовые характеристики. Фазовый сдвиг датчика может снизить запас по фазе всей системы в целом и привести к возникновению нестабильности.
На выходах датчиков второго порядка после подачи на их входы ступенчатого воздействия практически всегда появляются колебания. Эти колебания могут быть очень кратковременными, тогда говорят, что датчик демпфирован, или они могут длиться продолжительное время, а то и постоянно. Продолжительные колебания на выходе датчика являются свидетельством его неправильной работы, поэтому их надо стараться избегать. Любой датчик второго порядка характеризуется резонансной (собственной) частотой, которая выражается в герцах или радианах в секунду. На собственной частоте происходит значительное увеличение выходного сигнала датчика. Обычно производители указывают значение собственной частоты датчика и его коэффициент затухания (демпфирования). От резонансной частоты зависят механические, тепловые и электрические свойства детекторов. Обычно рабочий частотный диапазон датчиков выбирается либо значительно ниже собственной частоты (по крайней мере на 60%), либо выше ее. Однако для некоторых типов датчиков резонансная частота является рабочей. Демпфирование — это значительное снижение или подавление колебаний в датчиках второго и более высоких порядков. Когда выходной сигнал устанавливается достаточно быстро и не выходит за пределы стационарного значения, говорят, что система обладает критическим затуханием, а ее коэффициент демпфирования равен 1. Когда коэффициент затухания меньше 1, и выходной сигнал превышает установившееся значение, говорят, что система недодемфирована. А когда коэффициент затухания больше 1, и сигнал устанавливается гораздо медленнее, чем в системе с критическим затуханием, говорят, что система
29
передемпфирована.
17. Факторы окружающей среды
Условия хранения — совокупность предельных значений факторов окружающей среды, воздействующих на датчик в течение определенного промежутка времени, при которых не происходит существенного изменения его рабочих характеристик и обеспечивается поддержание его работоспособности. Обычно условия хранения устанавливают: максимальную и минимальную температуры хранения, а также максимальную относительную влажность при этих температурах. К значению относительной влажности необходимо добавить такую характеристику, как «отсутствие конденсата». В зависимости от физической природы датчика могут указываться дополнительные условия хранения, например, максимальное давление, присутствие некоторых газов или отсутствие вредных испарений.
Краткосрочная и долгосрочная стабильность (дрейф) — характеристики точности датчиков. Краткосрочная стабильность описывает изменения рабочих характеристик датчика в течении минут, часов и даже дней. Выходной сигнал датчика может увеличиваться или уменьшаться, что может быть выражено через величину шума сверхнизкой частоты. Долгосрочная стабильность зависит от процессов старения, которые изменяют электрические, механические, химические и термические свойства материалов датчика. Долгосрочный дрейф параметров может измеряться достаточно длительными интервалами времени: месяцами и годами. Долгосрочная стабильность является очень важной характеристикой для датчиков, используемых для прецизионных измерений. Скорость старения определяется условиями хранения и эксплуатации, а также тем, насколько хорошо элементы датчиков изолированы от окружающей среды, и какие материалы использовались для их изготовления. Интенсивное старение типично для датчиков, в состав которых входят органические компоненты, и не столь существенно для датчиков из неорганических элементов. Например, металоксидные термисторы в стеклянных корпусах обладают лучшей долговременной стабильностью, чем такие же термисторы, покрытые эпоксидной смолой. Для повышения долговременной стабильности элементы датчиков подвергают термоцикличной подготовке, моделирующей экстремальные условия работы. Например, датчик может периодически перемещаться из среды с температурой замерзания в среду с очень высокой температурой. Такая термоцикличная подготовка повышает стабильность характеристик датчиков, позволяет обнаружить скрытые дефекты и произвести отбраковку негодных устройств.
В перечень условий окружающей среды, воздействующих на датчики, практически никогда не входят физические параметры, измеряемые датчиками. Например, для датчика, определяющего давление воздуха, учитываются следующие факторы окружающей среды: температура воздуха и рядом расположенных объектов, влажность, вибрации, ионизирующая радиация, электромагнитные поля, гравитационные силы и т.п. Все эти параметры не только могут, но и влияют на рабочие характеристики датчика. При этом необходимо учитывать, как динамические, так и статические составляющие этих факторов. Многие из параметров окружающей среды имеют мультипликативную природу, т.е. они влияют на передаточную функцию датчика, например, меняют его коэффициент усиления. Одним из подтверждений этого эффекта является поведение резистивного датчика напряжений, чувствительность которого увеличивается с ростом температуры.
Очень важным требованием для современных датчиков является обеспечение их стабильной работы в разнообразных условиях окружающей среды. Поэтому разработчики, а также экспериментаторы всегда должны учитывать все возможные внешние воздействия, способные повлиять на рабочие характеристики датчиков. Например, на выходе пьезоэлектрического акселерометра могут появляться паразитные сигналы из-за: резкого изменения окружающей температуры, электростатического разряда, образования электрических зарядов (эффект трибоэлектричества), вибрации соединительных проводов, электромагнитной интерференции (ЭМИ) и т. п. Даже если производитель датчика не указал эти факторы, экспериментатор должен проверить его поведение в конкретных условиях эксплуатации и в случае необходимости (при реальном ухудшении рабочих характеристик от влияния внешних факторов) принять
30