

attachments / sms-demag 2012
.pdfМоменты на валу электропривода натяжных механизмов
t |
|
Поэтому Qpт = B h l = B h ∫ν pdt |
(15) |
0 |
|
С другой стороны, определяя объем через массу (см. формулу (14)), имеем
Qpт = |
m |
=π (Rp2 |
− Rp2 |
0 ) B |
(16) |
|
γ |
||||||
|
|
|
|
|
Сравнивая формулы (15) и (16), можно получить значение радиуса рулона
Rp = |
h t |
|
|
π ∫ν pdt + Rp0 |
|
||
|
|
2 |
(17) |
|
0 |
|
|
Производная от выражения (17) позволяет определить составляющую динамического момента Мдин2
dRp |
= |
|
|
hν p |
= |
hν p |
|
dt |
|
|
t |
(18) |
|||
|
|
|
|
||||
|
|
h |
|
2πRp |
|||
|
|
2π |
∫ν pdt + R2p0 |
|
|
|
|
|
|
π |
|
|
|
||
|
|
0 |
|
|
|
||
Таким образом, выражения (14)...(18) позволяют при известных Rp0, h, B, γ и заданном законе изменения скорости во времени рассчитать зависимости изменения радиуса рулона, момента инерции и динамических моментов от времени.

Система регулирования натяжения и скорости натяжных механизмов
Как было сказано ранее, транспортировка полосового материала обеспечивается с помощью натяжных барабанов (роликов), которые имеют постоянный радиус натяжения Rр=const. Законом управления электроприводом натяжных механизмов является стабилизация потока и тока якоря двигателя: Ф=const, Ia=const. При этом система управления электроприводом натяжных механизмов должна работать в двух режимах:
-режим регулирования скорости;
-режим регулирования натяжения.
Врежиме регулирования скорости схема системы управления ЭП натяжных механизмов аналогична двухконтурной схеме с подчиненным регулированием параметров.
Врежиме регулирования натяжения следует отличать режимы стабилизации натяжения в режиме двигателя и режиме торможения.
Постоянство потока обеспечивается соответствующей системой стабилизации тока возбуждения двигателя. Поэтому основной задачей регулирования натяжения в ЭП натяжных механизмов является стабилизация тока якоря в переходных и установившихся режимах. При этом полным сигналом
задания на ток должен быть сигнал IΣз, который учитывает все составляющие тока, является функцией угловой скорости двигателя, линейной скорости полосы, суммарного момента системы ЭП и т.д. (в соответствии с составляющими момента на валу двигателя, определенном по формуле (11)).
Для обеспечения стабилизации тока якоря в режиме двигателя необходимо, чтобы контур
скорости был разомкнут. Поэтому задание IΣз в режиме двигателя является уровнем ограничения регулятора скорости.
Uоб |
|
|
|
IΣ,з |
IΣ,з |
||||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
WpU |
|
|
|
|
|
WpI |
|
Uω,з |
|
|
|
|
U I ,з |
|
|
||||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uдω |
|
|
|
|
uдI |
|
||
Фрагмент системы регулирования скорости и натяжения натяжных механизмов
Система регулирования натяжения и скорости натяжных механизмов
В режиме двигателя задание на скорость на входе регулятора скорости определяется суммой сигналов задания Uωз и Uоб. Составляющая задания на скорость Uωз формируется из нескольких составляющих, которые учитывают некоторые параметры скоростного режима прокатки (скорость прокатки, необходимую силу натяжения, размер петли и др.). Составляющая задания Uоб называется задачей на скорость обгона. Она вводит регулятор скорости в режим насыщения. Эта составляющая необходима для ограничения скорости полосы при условии ее обрыва.
U I ,з
IΣ,з
Uвх
Uω,з Uоб
uдω
Регулированное ограничение выходного сигнала регулятора скорости
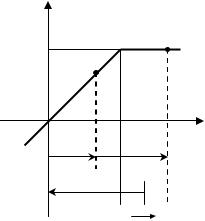
Если в одном из режимов (двигателя или торможения) возникнет обрыв полосы, то двигатель, не имея сопротивления, начнет разгоняться. При этом сигнал обратной связи по скорости uдω увеличивается и выводит регулятор скорости из насыщения. Превышение скорости ограничивается величиной νоб. В сигналах системы управления это ограничение имеет вид
|
Uω,з −uдω |
|
=Uоб |
(19) |
|
|
Если принять, что заданием на скорость будет скорость прокатки νn, а сигналу обратной связи по скорости соответствовать линейная скорость двигателя (Rpωдв)/ip, то получим линейную скорость обгона
ν |
п |
− |
Rpωдв |
|
=ν |
об |
|
ip |
|
(20) |
|||||
|
|
|
|
||||
|
|
|
|
|
|
Величина скорости обгона νоб может быть постоянной, или зависеть от скорости прокатки,
например νоб =α+β|νn|.
В режиме торможения сигнал суммарного статического тока подается непосредственно на регулятор тока, обеспечивая ограничения регулятора скорости на уровне нуля. В этом режиме натяжной механизм тормозит полосу, обеспечивая необходимое натяжение.

Однозонная система регулирования натяжения
Однозонная система регулирования натяжения используется для намоточно-размоточных механизмов с переменным радиусом рулона (Rр=var) и ЭП малой мощности. Законом управления для такой системы ЭП является стабилизация потока двигателя (Ф=const) и соотношение тока якоря к радиусу рулона Ia/Rр=const.
Постоянство потока обеспечивается соответствующей системой стабилизации тока возбуждения двигателя. При этом, как видно из формулы (5), обеспечение автоматически обеспечивает стабилизацию силы натяжения. ЭДС двигателя при таком способе регулирования будет иметь гиперболическую зависимость от радиуса рулона
Eдв = CeФωдв = |
CeФνп |
= |
keνп |
(21) |
|
Rp |
Rp |
||||
|
|
|
Таким образом, при изменении радиуса рулона с минимального Rp0 до максимального Rpk необходимо одновременное пропорциональное увеличение тока якоря и параболического уменьшения ЭДС двигателя.
Как видно из рис., большую часть времени двигатель работает с повышенным током якоря, что приводит к увеличению потерь в двигателе и его перегреву. Кроме того, при пониженной скорости прокатки необходимо снижение напряжения преобразователя, питающего двигатель, т.е. двигатель полностью по напряжению не используется.
Іа
100%
75%
Едв
Диаграммы регулирования тока якоря и ЭДС двигателя в зависимости от радиуса рулона
В массиве графиков большему значению силы натяжения соответствует выше расположенные линии.
САР ЭП по приведенным условиям строится по принципу регулирования тока якоря. На вход регулятора тока якоря подается сигнал задания на начальное значение ЭДС двигателя, которое, в соответствии с формулой (21), является эквивалентом задачи на линейную скорость прокатки νn при исходном значении радиуса рулона Rp0. На входе регулятора сигнал задания сравнивается с сигналом обратной связи по ЭДС двигателя. Так обеспечивается стабилизация этого параметра.

Однозонная система регулирования натяжения
С увеличением радиуса рулона Rp возрастает линейная скорость рулона. Так как сила натяжения пропорциональна разности скоростей νр-νn, сила натяжения и статический момент на валу двигателя также увеличивается. При этом угловая скорость двигателя уменьшается, что ведет к снижению его ЭДС. Это приводит к росту разницы между напряжением питания двигателя и его ЭДС и, соответственно, увеличению тока якоря. Поэтому момент двигателя повышается и компенсирует рост статического момента. Так устанавливается соответствие между радиусом рулона и током якоря и обеспечивается постоянство соотношения Ia/Rp.
На регулятор также заводится сигнал, пропорциональный текущему значению тока якоря. Обратная связь по току якоря предназначена для увеличения быстродействия контура тока путем компенсации соответствующей электромагнитной постоянной времени.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Система возбуждения |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
двигателя |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Wде |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ce |
|
|
|
|
|
|
|
|
|
|
|
|
νп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
CM Ia |
|
|
|
Ф |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
C |
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
WpI |
|
|
|
|
п |
|
|
M |
a |
|
|
× |
|
|
|
× |
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
1 |
+ pTμ |
|
|
|
1 + pTa |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
kдI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M дв |
|
|
|
|
|
|
|
ωдв |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Rp |
|
|
ν p ip |
|
|
|
|
|
|
|
|
|
T ip |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|||||||||||||||||||||
× |
|
|
|
|
|
|
|
|
|
|
|
× |
|
|
|
|
|
M c |
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
νп ip |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ip |
|
|
|
|
|
|
|
|
pJ Σ′ |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M с,доп |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Однозонная система регулирования натяжения - Ф=const, Ia/Rр=const

Однозонная система регулирования натяжения при переменном потоке
Однозонная система регулирования натяжения при переменном потоке используется для намоточно-размоточных механизмов с переменным радиусом рулона (Rр=var) и ЭП средней мощности. Законом управления для такой системы ЭП является стабилизация тока якоря двигателя (Ia=const) и соотношение потока возбуждения к радиусу рулона Ф/Rр=const. Для обеспечения этих условий в системе регулирования ЭП должно быть два контура.
Один контур обеспечивает стабилизацию тока якоря, а другой – соотношение между потоком и радиусом рулона. Как видно из формулы (21), условие
выполняется путем стабилизации ЭДС двигателя.
При увеличении радиуса рулона увеличивается момент сопротивления двигателя и, поэтому, уменьшается его угловая скорость. Это приводит к соответствующему уменьшению сигнала обратной связи по ЭДС двигателя на регуляторах и
Wpe2. В это время регулятор Wpe1 заведен в насыщение сигналом
скорости обгона νоб. Поэтому контур регулирования ЭДС в якорной цепи двигателя разомкнут.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I f |
|
|
|
|
|
|
|
|
Ф |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kпf |
|
|
|
|
|
|
|
|
|
1 R f |
|
|
|
k |
|
|
|
|||||||||||||||
|
W |
pe,2 |
|
|
|
|
|
|
|
Wpf |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f |
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 + pTμf |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1+ pT |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
μf |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kдf |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
IΣ,з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Wде |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ce |
|
|
|
CM Ia |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kп |
|
|
|
|
|
|
|
|
|
|
|
CM |
Ra |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
Wpe,1 |
|
|
|
|
|
|
WpI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
× |
|
|
|
|
|
× |
|||||||||||||||||||||
νп |
|
|
|
|
|
|
|
|
|
1 |
+ pTμ |
|
|
|
|
|
|
|
|
|
1 + pTa |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
νоб |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kдI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M c |
|
|
M дв |
|
|
|
|
|
|
|
|
ωдв |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
p |
× |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
× |
|
1 |
|
|
|
|
|
1 |
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ip |
|
|
|
|
|
|
|
|
|
|
|
pJ Σ′ |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M с,доп
Однозонная система регулирования натяжения при Ia=const, Ф/Rр=const

Однозонная система регулирования натяжения при переменном потоке
На регуляторе Wpe2 выполняется сравнение сигнала задания на линейную скорость прокатки νn и текущего сигнала обратной связи по ЭДС двигателя. Выходной сигнал регулятора Wpe2 является входным для контура регулирования потока. Контур реагирует на увеличение сигнала рассогласования на входе регулятора Wpe2 изменением потока возбуждения двигателя в сторону его повышения. Т.о., снижение угловой скорости двигателя компенсируется повышением его потока возбуждения и ЭДС стабилизируется.
В случае разрыва полосы нагрузка ЭП намоточно-размоточного механизма мгновенно упадет до нагрузки холостого хода. Одновременно, за счет этого возрастают угловая скорость и ЭДС двигателя. Они будут расти до уровня, определенного сигналом скорости обгона νоб. После этого регулятор Wpe1 выйдет из насыщения, контур регулирования ЭДС в якорной цепи замыкается и снижает ток якоря до тока холостого режима. Дальнейший рост угловой скорости (ЭДС) выше заданной заканчивается, и начинается ее уменьшение до заданного уровня скорости прокатки. При этом возникает кратковременный неустойчивый режим, когда одновременно замкнуты оба контура регулирования ЭДС.
САР натяжения должна работать во всех режимах - разгона, торможения и устойчивом, поэтому при ограничении выхода регулятора Wpe1 следует учитывать все составляющие тока двигателя в виде сигнала ограничения IΣз. Кроме того, необходимо помнить, что сигнал ЭДС формируется с помощью сигналов тока и напряжения якоря.
Выбор структуры регуляторов САР и их настройка выполняется по принципу подчиненного
управления. |
Ia ,Ф ,ωдв |
|
|
|
(νп,max ) |
|
Недостатком САР регулирования натяжения при |
|
|
|
|||
100% |
|
Ia |
(Tmax ), Eдв |
|||
изменении потока является то, что двигатель все время |
|
Ф |
|
|
|
|
|
ωдв• |
|
|
|
||
работает с пониженным током и поэтому не используется |
|
|
|
(νп,min ) |
||
полностью по перегрузочной способности (двигатель |
|
|
Ia |
(Tmin ), Eдв |
||
|
|
|||||
должен быть большей мощности для обеспечения 50% |
|
|
|
|
||
необходимого тока при пониженном потоке возбуждения). |
|
|
|
Rp |
|
|
|
|
|
|
|
||
|
Rp0 |
|
Rpк |
|
|
|
Диаграммы регулирования потока возбуждения и ЭДС двигателя в зависимости от радиуса рулона

Двохзонная система регулирования натяжения (комбинированная)
Для устранения недостатка предыдущей схемы регулирования натяжения, когда весь диапазон скорости ЭП обеспечивается за счет снижения потока, двухзонная система регулирования предоставляет возможность регулировки скорости как за счет регулирования потока, так и за счет регулирования тока якоря двигателя.
Первая зона регулирования дает диапазон D1=ωmax/ωн изменения угловой скорости двигателя от максимальной до номинальной. Вторая зона – изменения угловой скорости
двигателя от номинальной до конечной (рулон с максимальным
радиусом Rpk).
В первой зоне обеспечивается закон регулирования натяжения
Ia=const, Ф/Rр=const. При этом
поток регулируется в интервале (0,45…1)Фн. Угловая скорость меняется в гиперболической зависимости от радиуса рулона, а ЭДС двигателя является неизменной.
|
|
|
|
|
|
|
|
|
|
Фmin |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I f |
|
|
|
|
|
|
|
|
|
|
Ф |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kпf |
|
|
|
|
1 R f |
|
|
|
|
|
k f |
|
|||||||||||||||||
|
|
|
|
Wpe |
|
|
|
|
|
|
|
|
|
Wpf |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 + pTμf |
|
|
|
|
1 + pTμf |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kдf |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
IΣ,з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Wде |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
− IΣ,з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ce |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
νоб |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
CM Ia |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kп |
|
|
|
|
|
CM |
Ra |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
Wpϑ |
|
|
|
|
|
|
|
|
WpI |
|
|
|
|
|
|
|
|
|
|
|
|
× |
|
|
|
|
× |
|
||||||||||||||||||||||
νп |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
+ pTμ |
|
|
|
|
|
|
1 + pTa |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
ν p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kдI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ωдв |
||||||||||||
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
× |
|
|
|
|
|
p |
× |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
× |
|
|
1 |
|
|
|
дв |
|
1 |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ip |
|
|
|
|
|
|
|
|
|
|
|
|
pJ Σ′ |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
νп ip |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M с,доп |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Двухзонная система регулирования натяжения

Двохзонная система регулирования натяжения (комбинированная)
Во втором диапазоне регулирования скорости выполняется закон регулирования натяжения Ф=const, Ia/Rр =const. Поток в этой зоне не меняется, растет линейно ток якоря, а ЭДС и угловая скорость двигателя уменьшаются гиперболически при увеличении радиуса рулона.
Отличием двухзонный системы регулирования натяжения от однозонной по закону регулирования Ia=const, Ф/Rр=const, является то, что вместо внешнего контура регулирования ЭДС двигателя в двухзонный САР используется контур регулирования линейной скорости рулона νp. Это связано с тем, что во второй зоне двухзонный САР натяжения ЭДС меняется, а линейная скорость рулона поддерживается в обеих зонах на заданном уровне.
Условием перехода из одной зоны в другую является достижение угловой скорости двигателя номинального значения ωн.
В первой зоне регулятор линейной скорости рулона Wpν находится в насыщении за счет сигнала обгона νоб. Верхняя граница насыщения определяется величиной сигнала суммарного тока IΣз. Регулятор выйдет из насыщения при обрыве полосы, когда линейная скорость рулона превысит скорость
прокатки на заданную νоб величину. |
|
Ia ,Ф ,ωдв |
|
|
|
||||
При дальнейшем уменьшении угловой скорости |
100% |
|
|
Eдв |
|
||||
|
|
|
|
|
|
|
|
||
двигателя, когда она становится меньше номинальной, |
|
|
Ф |
|
|||||
САР переходит во вторую зону регулирования. При этом |
75% |
|
|
|
|
Ia |
|
||
поток достигает своего номинального значения и больше |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
не изменяется. |
|
|
|
|
|
|
|
||
|
|
ωдв• |
|
|
|
|
|||
Далее, с ростом радиуса рулона, увеличение |
50% |
|
|
|
|
|
|
|
|
момента сопротивления полосы приводит к уменьшению |
|
|
|
|
|
|
|
|
|
ЭДС двигателя и, соответственно, к увеличению тока |
|
|
|
|
|
|
|
|
|
|
|
|
ωн• |
|
|
|
|
||
якоря. |
|
|
|
|
|
|
|||
|
|
|
|
|
|||||
Определение структуры регуляторов и расчет их |
|
|
|
|
|
|
|
|
Rp |
|
|
|
|
|
|
|
Rp |
||
параметров выполняется аналогично однозонной САР. |
|
|
|
|
|
|
|
|
|
Rp0 |
|
|
|
|
|
ωk• |
Rpк |
||
|
|
|
|
|
|
||||
Диаграммы регулирования натяжения в двухзонной САР