

attachments / sms-demag 2012
.pdfТребования, предъявляемые к главному приводу блюмингов и слябингов. Порядок расчёта мощности привода
Из условий технологического процесса блюминга − слябинга вытекают следующие требования
кглавному приводу.
1.Минимальное время протекания переходных процессов при заданных предельных значениях допустимого тока.
2.Большая частота включения приводного двигателя − до 1000 вкл/час.
3.Широкий диапазон регулирования скорости (D≥20:1).
4.Необходимость двухзонного регулирования.
5.Высокая перегрузочная способность по току и моменту с учётом того, что после захвата привод в течении определённого промежутка времени преодолевает динамическое усилие и усилие деформации металла.
6.Высокая надёжность работы системы привода.
7.Высокая ремонтоспособность системы привода (экономические потери от остановки стана
весьма велики).
В главных приводах обжимных станов применяют двигатели постоянного тока, получающие питание от отдельных регулируемых источников. В последнее время начали использоваться системы ТПЧ-СД. Реверсивные прокатные двигатели, изготовляемые в настоящее время имеют мощность 8000…11500 кВт; номинальная скорость − 60…65 об/мин; предельную скорость при ослаблении поля 90…120 об/мин. Характерным для этих двигателей является пониженное значение момента инерции 75…125 т·м2.
Мп |
Мп |
|
|
|
Iп |
Iп |
|
|
|
|
|
|
|
|
Ф |
М |
I |
Р |
I |
U |
|
|
|
|
I |
|
|
Ф |
U |
М |
Р |
|
|
|
Ф |
|
М |
|
|
Р |
U |
|
|
|
|
|
|
||
зона |
|
зона |
|
|
Эксплуатационная характеристика двигателя
При расчёте и проектировании главных приводов реверсивных станов необходимо знать перегрузочную способность двигателя при разных скоростях вращения, которые могут быть получена их эксплуатационных характеристик, на которых приведены графики удельных значений тока, момента и мощности для различных скоростей.
Требования, предъявляемые к главному приводу блюмингов и слябингов. Порядок расчёта мощности привода
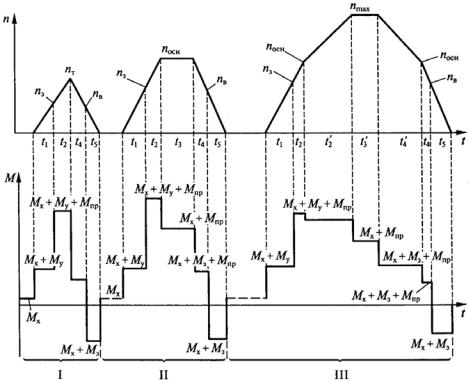
Расчёт мощности двигателя блюминга или слябинга является проверочным. Предварительно двигатель выбирается исходя из опытных данных. Исходными данными при проверочном расчёте является программа прокатки для наиболее тяжёлого сортамента. В программе указывается количество пропусков, размеры раскатов после каждого пропуска распределение обжатий по пропускам. Строится график скорости по пропускам.
В первых пропусках диаграмма скорости треугольная (nmax<nн). В последу пропусках с удлинением длина раската nmax=nн. При очень длинных расчётах в последних пропусках используется ослабление поля nmax>nн. При расчётах обычно время разгона до nн берётся 0.7…1 с, а динамический ток −
Iдин=(0.8…1)·Iн.
Ускорения дли группового привода − а=40…60 (об/мин/с); для индвидуального привода: а=70…100 (об/мин/с). Замедления для группового привода − b=50…100 (об/мин/с); для индвидуального привода: b=80…130 (об/мин/с).
Типовые графики скорости
По диаграмме скоростей строится диаграмма моментов по пропускам и подсчитывается эквивалентный момент за цикл прокатки. Двигатель проходит по нагреву, если эквивалентный момент не превышает номинального. Максимальный момент не должен превышать допустимого по условиям эксплуатации во всём диапазоне регулирования скорости.

Функциональная схема системы автоматического управления главным приводом блюминга
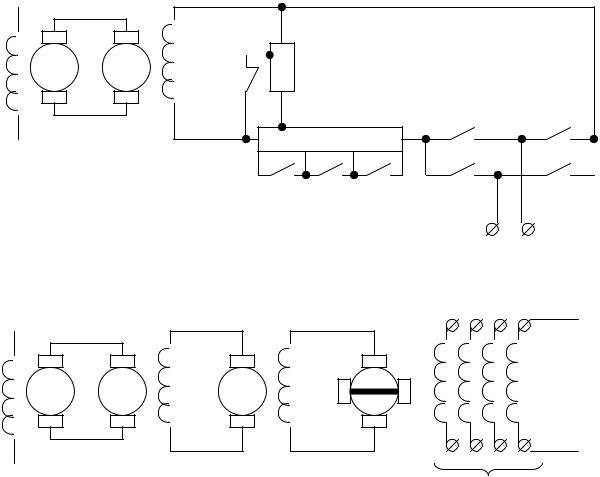
Главный привод блюминга с начала применения ЭП, пришедшего на смену паровой машине, строился по системе генератор − двигатель. На рис. изображена система Г – Д с маховиком на валу генератора. Такая система называлась системой Леонарда – Ильгнера.
Мотор – генераторная группа такой системы состоит из двух параллельно работающих генераторов 1, приводного асинхронного двигателя 3 с регулятором скольжения 4 и маховика 2. Регулятор скольжения работает в функции тока, потребляемого двигателем 3 из сети. Если ток небольшой, то скольжение уменьшается за счет закорачивания ротора. При этом маховик ускоряется, запасая энергию. При повышении нагрузки регулятор 4 вводит сопротивление в ротор двигателя 3. Маховик отдает накопленную энергию. Таким образом удается резко уменьшить нагрузки на электрическую сеть за счет использования энергии маховика, накопленной в менее загруженных пропусках.
|
|
|
|
|
|
|
6 |
7 |
|
Система Леонарда – Ильгнера |
|
|
|
||||
|
|
|
|
|
||||
была целесообразна из-за недостаточной |
|
|
|
|
||||
мощности |
электрических |
|
сетей |
|
|
|
|
|
металлургических заводов |
во |
время |
|
5 |
|
|
||
довоенной |
индустриализации |
и |
|
|
|
|||
|
|
|
|
|||||
послевоенной разрухи. В дальнейшем в |
1 |
4 |
|
1 |
||||
качестве |
приводных |
для |
мотор– |
|
||||
генераторных групп |
стали |
применять |
|
|
|
3 |
||
более |
экономичные |
синхронные |
|
|
|
|
||
двигатели. |
|
|
|
|
|
2 |
|
|
Система Леонарда – Ильгнера
Функциональная схема системы автоматического управления главным приводом блюминга
|
В начале развития ЭП реверсивных станов применялась простая релейно-контакторная |
|||||||
система Г – Д, недостатком которой являлась большая мощность в цепи регулирования, требующая |
||||||||
применения мощной релейно-контакторной аппаратуры, обладающей недостаточным быстродействием и |
||||||||
недостаточной надежностью. |
- |
|
|
|
|
|||
|
С |
появлением |
|
LG |
|
|
|
|
электромашинных |
|
усилителей |
|
|
|
|
||
|
|
|
R2 |
|
|
|||
стали |
применять |
|
кубическую |
M |
G |
|
|
|
систему |
Г – Д, в |
которой LG3 |
|
KM6 |
|
|
|
|
|
|
|
KM1 |
|
||||
питается от возбудителя G2, а его |
|
|
R1 |
KM2 |
||||
обмотка возбуждения LG2 – от |
+ |
|
|
|
|
|||
электромашинного |
|
усилителя |
|
|
|
|
|
|
(ЭМУ). |
Регулирование |
скорости |
|
KM5 |
KM4 KM3 |
KM2 |
KM1 |
|
производится в цепях управляющих |
|
|||||||
|
|
|
+ |
- |
||||
обмоток ЭМУ, на одну из которых |
|
|
|
|||||
|
Система Г – Д с релейно-контакторным управлением |
|||||||
подается сигнал задания скорости, |
|
|||||||
а на остальные – сигналы обратных |
|
в цепи возбуждения |
|
|
||||
связей. |
|
|
|
|
|
|
ЭМУ |
|
|
|
|
|
|
|
|
|
|
До |
настоящего |
- |
|
|
|
|
времени |
|
|
|
G1 |
||
реверсивные |
прокатные |
станы |
|
|
|
|
|
|
|
LG2 |
|||
оснащались |
системами |
M |
G3 |
LG3 |
||
тиристорный |
преобразователь – |
|
G2 |
|||
|
|
|
|
|||
двигатель постоянного тока (ТП - Д) |
LM |
|
|
|
||
с реверсом тока главной цепи. За |
|
|
|
|||
|
|
|
|
|||
рубежом и в Украине уже появились + |
|
|
|
оос |
||
в эксплуатации электроприводы |
|
|
|
|||
|
|
|
|
|||
реверсивных станов по схеме НПЧ |
|
|
Схема кубической системы Г – Д |
|||
– СД. |
|
|
|
|
|
|

Функциональная схема системы автоматического управления главным приводом блюминга
В настоящее время реверсивные прокатные станы оснащаются системами ТП − дпт с реверсом тока в главной цепи. За рубежом и на Украине появились ЭП реверсивных станов по схеме НПЧ − АД.
Приведенная на рис. функциональнаяUЗ.С. схема управления по системе ТП-Д обеспечивает в первых пропусках работу в пределах номинальной скорости двигателя, когда длина раската велика, а обжима − мала - с ослаблением поля двигателя.
 КА
КА
ЗИ 


6 кВ |
6 кВ |
TV1 TV2
РС |
РТ |
СИФУ1 |
|
|
L1 |
|
UD1 |
DT |
L2 |
|
|
М |
DH |
|
BR
Для питания якоря прокатного двигателя применен реверсивный тиристорный преобразователь UD1, вентильные группы которого питаются от трансформаторов TV1 и TV2. Реверс двигателя главного привода М обеспечивается раздельным управлением этими группами при помощи СИФУ-1. Схема управления якорем двухконтурная (контур скорости, контур тока). Скорость устанавливается бесконтактным командоаппаратом КА через задатчик интенсивности ЗИ.
|
|
|
|
LM |
|
|
|
|
|
DTB |
IВ |
|
|
|
|
|
|
UЗ.Э. |
РС |
РТВ |
СИФУ2 |
|
UD2 |
|
|
||||
|
|
ДЭ |
|
TV3 |
|
|
|
|
|
|
|
|
МЭ |
|
|
|
|
|
|
|
|
|
6 кВ |
Функциональная схема управления ЭП реверсивного стана по системе ТП – Д
Функциональная схема системы автоматического управления главным приводом блюминга
Схема управления возбуждением двигателя зависимая двухконтурная, астатическая. Регулятор тока возбуждения РТВ интегрально-пропорциональный, а регулятор ЭДС двигателя РЭ – интегральный с ограничением. В цепь обратной связи по ЭДС двигателя включен датчик ЭДС ДЭ, получающий сигнал пропорциональный току главной цепи и напряжению (ДТ, ДН), и модульный элемент МЭ, выделяющий модуль сигнала ЭДС двигателя.
Полярность выходного сигнала МЭ не изменяется от направления вращения двигателя М. На вход регулятора ЭДС подается сигнал пропорциональный номинальной ЭДС двигателя (при номинальном токе возбуждения).
Система обеспечивает автоматический переход в зону ослабления магнитного потока двигателя М в функции сигнала командоаппарата оператора КА.
Если Uз.с < 0,95 Uз.с.ном , то регулирование скорости происходит путем изменения напряжения опорной цепи при Ф = const. Если Uз.с>0,95·Uз.с.ном, то напряжение питания якоря остается постоянным, а ток возбуждения (поток Ф) двигателя уменьшается с ростом Uз.с . При разгоне до номинальной скорости (первая зона регулирования) Uз.с=0,95·Uз.с.ном . Поскольку Ед = 0 регулятор РЭ входит в насыщение и до n =
0,95nном. будет оставаться в этом состоянии; при этом ток возбуждения Iв=Iв.ном. |
и поток Ф имеет |
максимальное значение. Если поставить рукоятку КА в положение соответствующее |
Uз.с > 0,95 Uз.с.ном , |
ЭДС двигателя при n > 0,95nном. станет больше, сигнал на выходе МЭ станет больше Uз.э. . На входе РЭ появится отрицательный сигнал, который выведет его из состояния насыщения, поток двигателя будет уменьшаться, а скорость увеличиваться до тех пор пока сигналы Uз.э. и обратной связи по ЭДС двигателя не сравняются. Это произойдет при скорости выше номинальной, определяемой положением КА.

Функциональная схема системы автоматического управления главным приводом блюминга
Силовая схема цепи генератора и двигателя

Функциональная схема системы автоматического управления главным приводом блюминга
Функциональная схема взаимодействия САУ с внешним оборудованием

Функциональная схема системы автоматического управления главным приводом блюминга
Структурная схема системы управления главным приводом

Функциональная схема системы автоматического управления главным приводом блюминга