

21-26
.pdf
|
|
|
|
|
|
|
|
Sкр |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|||||||||||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
2 b |
c |
b |
c |
|
b |
c |
1 ; |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
Kf |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
З огляду на, що |
bн |
|
m |
c |
|
Kf2 |
|
: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
bc |
|
|
|
|
|
|
|
|
K 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
н |
|
|
|
b2 |
1 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
I2 I2н |
|
|
mc |
|
|
|
|
|
|
н |
|
|
|
; |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
b |
|
c |
|
|
|
b2 |
1 |
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
Оскільки |
bн |
m |
c |
|
Kf2 |
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
K 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
bc |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
u |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
н |
|
|
|
|
|
b2 1 |
|
|
|
|
|
||||||
|
I |
I |
|
|
|
m |
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
н |
|
|
|
|
|
|
(*) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
2 |
|
2н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
bн Ku |
|
|
|
|
|
bн Ku |
|
1 |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
2 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mc Kf |
|
|
|
|
|
mc Kf |
|
|
|
|
|
||||||||||
b K 2
Якщо в рівнянні при зміні K u , K f bc н u 1.6 й bн 1.6 , то з
mc Kf2
(*): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
I |
|
|
m |
|
|
Kf |
|
- струм |
I |
|
|
|
приблизно можна вважати ≡ f і назад ? |
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
2 |
|
2н |
|
|
c |
|
Ku |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
U. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Інше вираження для I2 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
Струм ротора: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
I2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U1 |
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
r |
C |
r |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K 2 x |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
2 |
|
|
|
|
C x |
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
S |
|
|
|
|
|
|
|
|
|
f |
|
|
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
У цьому вираженні можна прийняти r1 0 |
й x 1 C1 x |
|
0 |
, |
|
|
||||||||||||||||||||||||||||||||||||||||||
2 |
|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
C |
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
тому що із Sкр |
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
|
|
|
при r1 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
r2 (x |
1 |
C x |
|
|
)2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
1 |
|
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
C r |
|
|
|
|
|
|
C r |
|
|
|
C r |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
x 1 C1 x |
|
|
|
|
|
|
1 |
2 |
; Але |
|
|
|
1 |
2 |
|
|
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
2 |
|
|
|
|
Sкр |
|
|
|
|
Sкр |
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
I |
I |
K |
|
|
S |
|
|
|
|
; Але S S |
|
|
|
|
Kf |
|
|
; I |
I |
|
K |
|
|
Sн Kf |
|
I |
|
Kf |
|
|||||||||||||||||||
2 |
|
2н |
|
|
u |
|
Sн |
|
|
|
|
|
|
|
н |
|
|
K u2 |
|
|
2 |
|
2н |
|
|
u |
|
|
K u2 |
|
|
2н |
|
K u |
||||||||||||||
.
Струм статора АД.
Струм статора можна представити у вигляді геометричної суми активної й реактивної складових:
|
|
|
|
|
|
I |
I |
0 |
cos |
I |
|
cos ; |
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
1a |
|
|
|
|
|
|
|
0 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
|
|
|
I |
0 |
|
sin |
I sin ; |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1p |
|
|
|
|
|
|
|
0 |
2 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
|
|
|
|
I2 I2 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
1р |
1а |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
0 |
, |
|
|
- струм, що |
|
||||||||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
намагнічує, АД в режимі синхронного |
|||||||||||||||||||||||||||
|
|
|
I 0 |
|
|
|
|
|
|
|
|
|
обертання (S=0 I2 |
0 , ). |
|
|
|
|||||||||||||||||||||
|
0 |
|
|
|
I a0 |
|
|
|
|
|
|
|
|
Якщо не враховувати активні |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
втрати при х.х. ( sin |
|
|
0 ): |
|
|||||||||||||||||||||
|
|
|
|
I r0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I1 |
|
|
I 0 I2 sin 2 I2 cos 2 |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
При робочих ковзаннях малий, тому sin |
|
|
0 : |
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
I |
|
|
I2 |
|
I 2 |
|
|
; (*) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
0 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При зміні K u , |
K f |
|
I1 міняється менше ніж I |
|
або I2 , тому що він |
|||||||||||||||||||||||||||||||||
дорівнює їх геосуммі, а при будь-яких змінах K u |
і K f , |
I і I2 змінюються в |
||||||||||||||||||||||||||||||||||||
протилежних напрямках ( I |
|
I |
|
|
Ku |
|
; |
|
I |
I |
|
|
|
|
Kf |
|
). |
Все залежить від |
||||||||||||||||||||
|
|
|
|
|
|
|
|
Kf |
|
|
|
2 |
|
|
|
2н |
|
|
Ku |
|
|
|
|
|
|
|
|
|
||||||||||
того вплив якого із двох що складають є переважним. |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
1. Якщо K u const , а Kf |
|
var ia . При малих навантаженнях переважний |
||||||||||||||||||||||||||||||||||||
вплив на I1 |
робить I , тому при зростанні K f |
зменшуються , |
I , I1 . При |
|||||||||||||||||||||||||||||||||||
великих навантаженнях зі зростанням K f |
|
зменшується , |
але |
I2 й струм |
||||||||||||||||||||||||||||||||||
статора буде зі зменшенням K f |
зростати I1 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
2. Якщо |
Kf |
const , |
а |
|
|
K u var ia . |
При |
|
|
малих |
|
навантаженнях |
при |
|||||||||||||||||||||||||
зменшенні K u |
зменшуються , |
I , а I2 |
|
зростає, але I1 зменшується. При |
||||||||||||||||||||||||||||||||||
великих навантаженнях |
зі |
|
зменшенням |
|
K u зменшуються |
, |
I , але |
I2 |
||||||||||||||||||||||||||||||
зростає й, отже, при великій для I2 в. I1 |
|
Струм I1 |
буде зростати. |
|
|
|
||||||||||||||||||||||||||||||||
3.21.Синхронні двигуни. Механічні й кутові характеристики синхронних двигунів.
Синхронні електродвигуни на електростанціях для приводу кульових млинів пиловугільних електростанцій, для приводу мережних насосів і в деяких випадках циркуляційних насосів. Вони застосовуються для приводів не потребуючі регулювання швидкості тому що працюють при постійній частоті. Переваги СД у порівнянні з асинхронними:
1)основна перевага - можна шляхом зміни if змінювати реактивну потужність. Вона може видаватися в мережу (при перепорушенні) або споживатися з мережі (при недопорушенні). При роботі з перезбудженням (випереджальний cos() поліпшується cos( мережі, зменшуються втрати енергії й напруга в ній, збільшується cos( генераторів електростанції.
2)При аварійних зниженнях напруги (п/п; точки навантаження КЗ) СД можуть швидко збільшувати напругу, що приводить до збільшення стійкості паралельної роботи синхронних машин і підтримці необхідного рівня напруги в місці приєднання навантаження.
3)Максимальний момент СД пропорційний напрузі, а в АД пропорційний квадрату напруги. Тому СД менш чутливий до зниження напруги й зберігає більшу навантажувальну спроможність. Наявність АРВ і ФВ дозволяє забезпечувати стійкість при малих і великих зниженнях напруги.
4)ККД СД як правило на 1, 5-2% вище, ніж АД (за рахунок великого повітряного зазору зменшуються додаткові втрати в сталі).
5)Частота обертання СД не залежить від навантаження (на кілька відсотків вище частоти обертання АД), що важливо з погляду продуктивності механізму.
Синхронні машини оборотні тобто можуть працювати як у руховому режимі так і в генераторному. Але промисловість випускає СМ призначені для роботи тільки в генераторному або руховому режимі. Є ще синхронні компенсатори тому що особливості роботи машини в тім або іншому режимі проявляються різні вимоги до конструкції.
Частіше працюють у пускових режимах і повинні розвивати великий пусковий момент, ніж генератори. Це накладає певні умови на конструкцію ротора, демпферну (пускову) обмотку СД розраховують на більші струми й більш тривалий режим.
При установці тихохідних СД для приводу кульових млинів виключають редуктор, що ускладнює загальну кінематичну схему агрегату й захаращюючий приміщення котельного агрегату.
Недоліки:
1)Більш складні конструктивно ніж АД й повинні мати додаткові елементи - систему збудження, що збільшує вартість і ускладнює експлуатацію. Співвідношення вартості СД і АД в основному залежить від потужності й номінальної частоти обертання, причому якщо при малих габаритах СД дорожче АД, то зі збільшенням їхньої потужності й зменшенням частоти обертання співвідношення їх вартостей змінюється на користь СД.
2)У нормальних умовах вони мають невелику перевантажувальну здатність (для зниження габаритів і вартості в них ОВ полегшена). Вони мають порівняно невеликий пусковий момент і більш складну систему керування.
3)Пуск і регулювання швидкості обертання СД складніше чим АД. СД із частотою 3000про/хв конструктивно представляють масивний циліндр, усередині якого покладена обмотка збудження. СД із меншою частотою
обертання виконується з явно вираженими полюсами. У полюсні наконечники закладають мідні або латунні стрижні уркової обмотки.
Зі збільшенням потужності й зниженням номінальної частоти обертання СД стає дешевше АД і їх застосовувати доцільніше, а також, коли необхідно мати високий cos( установки).
Система збудження – електромашинна або з напівпровідниковими випрямлячами.
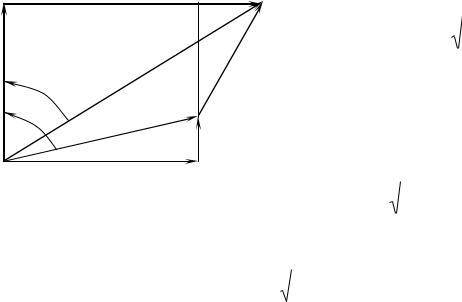
Багато робочих характеристик СД можуть бути отримані за допомогою ВД Якщо зневажити активним опором, то неявно полюсній СГ працюючий на
мережу б.м. з напругою U з моментом mт під дією якого ротор обертається із синхронною швидкістю дорівнює моменту Х.Х. m0; потужність, що віддається в мережу дорівнює нулю, (=0 і струм є чисто індуктивним .
U |
U |
q |
|
||
|
|
Eq |
I Eq U U jXd jXd
При збільшенні моменту mт до величини m’т ротор почне прискорюватися
тому що в початковий момент mэм=0 і J d p mT m 0 . dt
При (з>(c вісь q почне пересуватися швидше вектора U, ( щообертається зі швидкістю (c). Між векторами Еq і U виникне кут (. При (>0 утвориться позитивна, щодо напруги, активна складова струму Ia.
Eq
U |
U |
|
|
|
|
||
|
Ia |
U |
|
|
|
||
Ia |
|
||
|
|||
|
|
U |
|
|
|
||
|
|
q |
|
I |
I |
Eq |
|
|
|
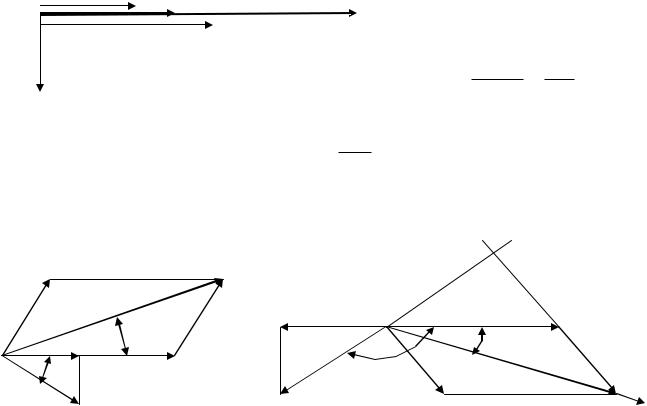
Новий сталий режим буде mT mэм m0 . Це генераторний режим.
Тепер нехай у вихідному режимі з (=0 (mэм=0) на вал машини прикладається момент механічних сил m”т діючий проти напрямку обертання.
Рівняння J |
d p |
(m`` |
m |
|
) 0 . Ротор гальмується. На векторній |
|
0 |
||||
|
dt |
T |
|
|
|
|
|
|
|
|
діаграмі вісь q буде поступово відставати щодо напруги. З малюнка б) видно, що при (<0 виникає негативна стосовно напруги активна складова струму Ia. Машина працює в руховому режимі споживаючи з мережі потужність. mэм=m”т+m0 - звідси визначається кут.
P m U I cos 0 - активна потужність, що віддається в мережу, негативна.
При переході в руховий режим фаза активної складової струму стосовно напруги на затискачах машини змінюється на 1800 (споживання з мережі активної потужності).
Для явно полюсного СГ рівняння рівноваги напруг має вигляд:
Eq U ra I jxq Iq jxd Id U Eq ra I jxq Iq jxd Id
У нас Р<0, але при дослідженні рухового режиму зручно оперувати позитивними потужностями. Можна досягти двома шляхами: 1) змінити позитивний напрямок струму; 2) залишити незмінним позитивний напрямок струму й ЕДС, але змінити позитивний напрямок зовнішньої напруги в мережі, U1=-U
1) Eq U ra I jxq Iq jxd Id U Eq ra I jxq Iq jxd Id
2) U1 U Eq ra I jxq Iq jxd Id
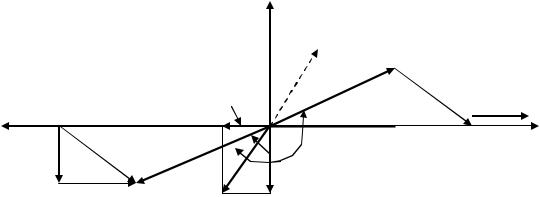
векторні діаграми СД при rа=0 мають вигляд:
EQ
jIqxq |
jIxq |
|
|
|
|
|
jIdxd |
U |
|
|
U
Iq
I
Id
jIqxq
jIxq
jId(xd-xq)Eq
jIdxd |
q |
|
EQ |
||
|
збудження
З векторної діаграми можна знайти вирази для P і Q порівнюючи векторні діаграми СД і СГ видно, що вони відрізняються знаком кута (: у навантаженого СГ (>0, а в СД (<0. Тому всі аналітичні вираження визначальні характеристики СГ (P, Q) справедливі й для СД.
|
|
|
|
P U I cos |
|
|
||||
|
P |
Eq U |
sin U2 |
xd xq |
sin2 |
|||||
|
|
|
|
|||||||
|
|
|
xd |
2 |
|
xd xq |
|
|
||
Q |
Eq U |
cos |
U2 |
xd xq |
cos 2 U2 |
|
xd xq |
|||
|
|
xd xq |
||||||||
|
xd |
|
2 xd xq |
2 |
|
|||||
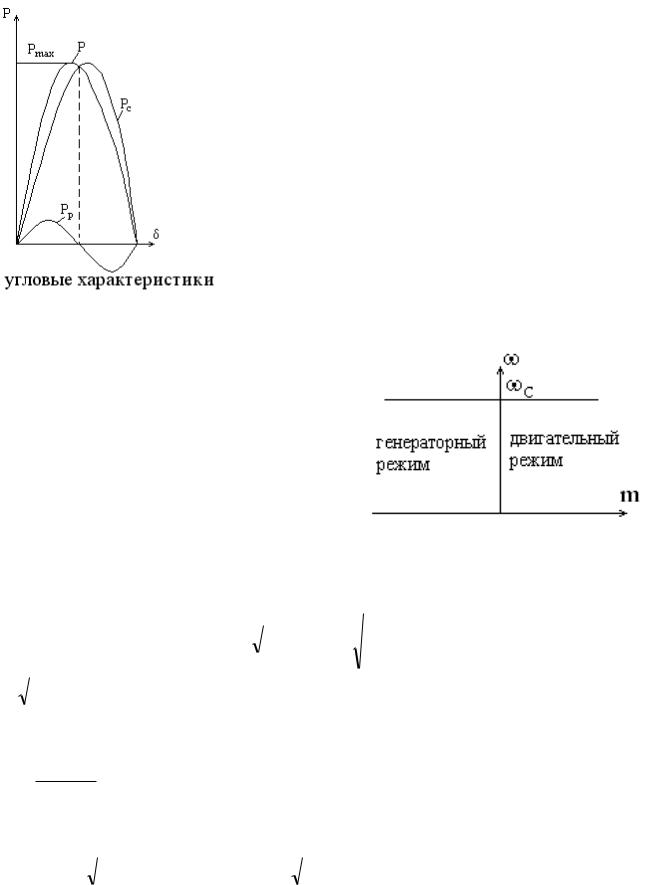
Характеристика потужності двигуна має вигляд:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для |
неявно |
полюсного |
|
|
двигуна |
|
(xd=xq): |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X' Э ; |
|
|
z S |
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тут більш тверда характеристика, ніж у СД із |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
циліндричним ротором. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Момент СД дорівнює: m |
|
p |
. |
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Реактивна потужність може бути позитивною й |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
негативної. При заданому ( Q>0 тільки при |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Eq>U. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Кутова швидкість СД у сталому режимі при |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
збільшенні навантаження на валу до mмах |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
незмінна й |
дорівнює |
|
|
|
|
|
2 f1 |
. Тому |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
P |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
механічна характеристика - лінія паралельна осі абсцис. |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
Активна |
|
|
|
й |
реактивна |
|
потужності |
|
в |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
номінальному режимі рівні: |
P |
Eq |
U |
sin ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
xd |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
Eq U |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Q |
|
|
|
|
|
|
|
|
|
|
cos U . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
xd |
|
|
|
|
|
|
|
xd |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
У номінальному режимі Eq=Eqn; (=(n, при |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
Un=1 In=1, маємо з векторної діаграми. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
tg n |
|
|
I xd cos n |
|
|
|
|
xd cos n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
U I xd |
sin n |
1 |
xd sin n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
cos |
|
|
|
|
Eqn |
sin |
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
n |
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
xd |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
x |
|
cos |
|
|
|
|
x |
|
cos |
|
|
|
|
|
|
|
|
|
|
|
|
x |
2 cos2 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
d |
n |
|
|
|
d |
n |
|
|
|
|
|
|
|
|
2 |
|
n |
|
|
|
|
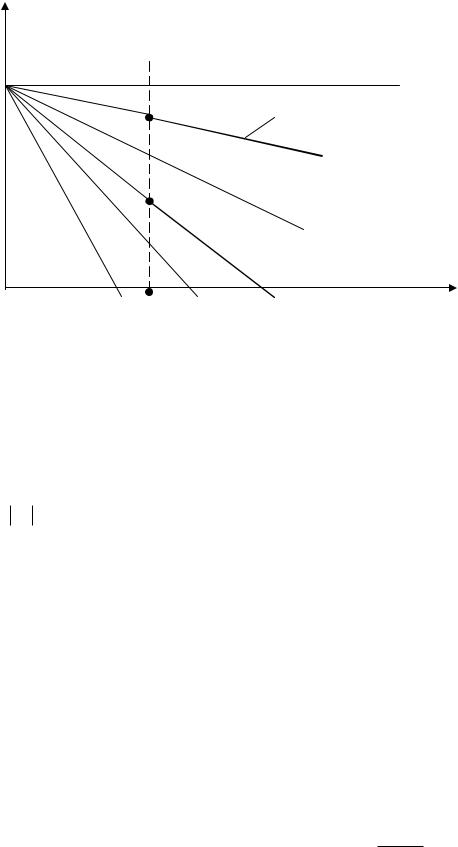
|
2 |
|
|
|
|
||||||||||||||||||
E |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 tg |
|
|
|
|
|
d |
|
|
(1 tg |
|
) |
|
||||||||||||||||||||
qn |
|
|
|
|
|
sin n |
|
|
|
|
tg n |
|
n |
|
|
|
tg2 |
|
|
n |
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 2 xd sin n xd |
2 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
При r=0, і відсутності спеціального регулюючого пристрою =900. Мінімальна за умовами стійкості величина Еqпр при заданій потужності
PEq.пp U .
xd
Розділивши цей вираз на Еqn одержимо:
Eq.пр |
|
|
P xd |
|
|
|
P xd |
|
Eqn |
|
|
|
|
|
|
||
2 |
2 |
|
||||||
U |
|
|
|
|||||
|
1 2 xd sin n xd |
|
|
1 2 xd sin n xd |
|
|||
Еqпр тим ближче до Еqn, чим більше навантаження СД і чим менше в нормальному режимі sin(n.
Статична перегруженість СД Кп характеризується відношенням максимальної за умовами стійкості електромагнітної потужності при номінальному порушенні Рпр до номінальної електромагнітної потужності Рн.
Для неявно полюсного двигуна :
Kп |
Pпр |
|
U* |
U* |
1 2 xd sin n xd2 |
|
Pn |
sin n |
xd cos n |
||||
|
|
|
З виразу видно, що статична перегруженість СД збільшується зі зниженням xd і cos(н (cos(н>0). Аналогічно й для явно полюсних СД. Для сучасних СД із xd(0, 8-1,5 і cos(н= 0, 8-0,9 статична перегруженість дорівнює приблизно двом.
3.15.Механічні характеристики ДПС
По способі порушення ДПС як і генератори підрозділяються на двигуни незалежного (паралельного), послідовного й змішаного збудження.
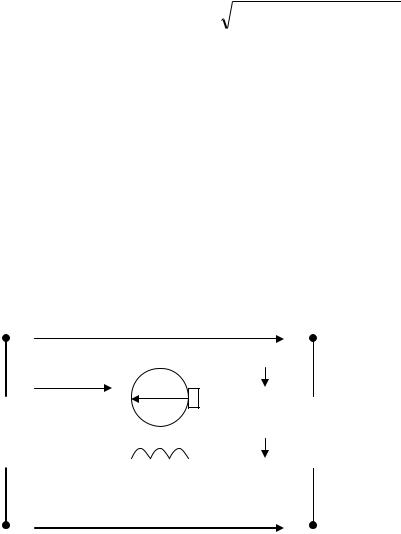
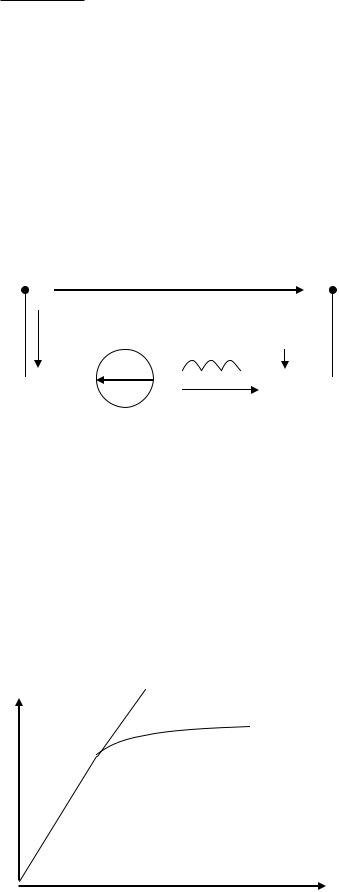
Механічні характеристики ДПС незалежного збудження
+ |
|
|
|
U a |
|
|
|
|
|
|
|
|
|
I a |
|
|
Ea |
|
|
Я |
rp |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ОВ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
rb |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
rpb |
|
|
||
+ |
|
|
|
U b |
Рис.1. |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|||
Якір двигуна (Я), його обмотка збудження (ОВ) одержують живлення |
||||||||||||
від різних, незалежних джерел напруги U a й U B |
що дозволяє окремо |
|||||||||||
регулювати напругу на якорі й на ОВ. Струм ОВ I B не залежить від струму |
||||||||||||
якоря Ia . |
|
|
|
|
|
|
|
|
|
|
|
|
Напруга струму Ia |
й ЕДС обертання двигуна Ea , (показані на мал.1) |
|||||||||||
відповідають руховому режиму роботи. Енергія споживається з мережі й перетворюється в механічну енергію, потужність якої дорівнює:
Ð mÅÌ w
Залежність між mÅÌ і w визначається його механічною
характеристикою. У сталому режимі роботи незалежно від схемивключення ОВ ДПС залежність між магнітним потоком Ф , Ea , I a , mЭМ і підведеною
напругою можна визначити співвідношенням: Ua Ia Ra Ea - підведена
напруга врівноважується зі спаданням напруги в якірному ланцюзі Ia Ra й наведеної в якорі ЕДС обертання Ea . Напрямок Ea і Ia протилежні й Ea називається противно ЕДС; Ia - струм у ланцюзі якоря; Ra ra rp - опір (сумарне) якірного ланцюга: ra - внутрішній опір якоря двигуна; rp - зовнішній опір реостата, включеного в ланцюг якоря.
Е |
|
С |
|
Ф n ; |
|
|
I |
|
|
|
U Ea |
, |
|
|||||||||
а |
е |
|
|
a |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ra |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
m |
|
|
C |
|
Ф I |
|
; |
С |
|
|
PN |
|
|
|
|
|||||||
ЭМ |
M |
a |
e |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
СM |
|
|
PN |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
2 a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Е |
|
|
Се |
Ф w С |
Ф w ; |
C |
|
|
Ce |
|||||||||||||
а |
|
|
|
M |
|
|||||||||||||||||
|
|
|
2 |
|
|
|
|
|
M |
|
|
|
|
|
2 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Тут N – число активних провідників обмотки; Р – число пар полюсів двигуна; а – число паралельних галузей обмотки якоря; w - кутова швидкість радий/сек.
Якщо користуватися n , а не
U I a Ra CeФ n ; |
|
|
n |
|
U |
|
I a Ra |
|
|||||||||||||||||
|
|
Ce |
Ф |
CeФ |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
mЭМ СМ |
|
Ф I a ; |
|
|
I a |
|
mЭМ |
|
|
|
|||||||||||||||
|
|
|
СМ Ф |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
n |
|
U |
|
|
|
mЭМ Ra |
|
|
|
|
|
|
|
|
|
|
|||||||||
C Ф |
|
|
C |
e |
C |
Ф |
2 |
|
|
|
|
|
|
|
|
||||||||||
|
|
e |
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
|
||||
w |
|
|
U |
|
|
|
|
mЭМ Ra |
|
- вираз для механічної характеристики |
|||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
C |
Ф |
|
|
|
|
C 2 |
Ф 2 |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
M |
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
||
w |
|
|
U |
|
|
|
|
|
|
I a Ra |
|
|
|
- вираз для електромеханічної характеристики |
|||||||||||
|
C |
Ф |
|
C |
|
Ф |
2 |
|
|
||||||||||||||||
|
|
|
M |
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
||
Позначимо K CM Ф ; цей коефіцієнт можна застосовувати незалежним
від навантаження в ДТП із незалежним порушенням, у якого є компенсаційна обмотка. Цей коефіцієнт можна вважати незмінним, якщо для звичайних двигунів зневажити реакцією якоря.
w |
U |
|
mЭМ Ra |
; |
|
|
|||
|
K |
|
K 2 |
|
При незмінних K ,Ф , Ra механічні характеристики представлені
прямою лінією.
Розглянемо вплив опору якірного ланцюга Ra на механічні характеристики.
wO |
|
|
|
|
|
wНОМ |
Естественн ая |
|
|
|
|
|
характеристика |
|
|
|
|
|
R1a ra |
|
|
|
|
wНОМ 3 |
|
|
|
|
|
|
R1a R2a R3a R4a R5a |
|
|
|
|
R3a |
|
|
|
|
|
R4 a |
|
|
|
|
|
R5a |
|
|
|
|
|
mНОМ |
m |
ЭМ |
(I |
a |
) |
|
|
|
|
||
|
Рис.2. |
|
|
|
|
При mЭМ 0 всі характеристики проходять через одну точку, що
лежить на осі ординат. w у цій крапці має цілком певні значення, що не залежать від Ra . Це швидкість ідеального х.х. wo і визначається:
wo |
|
U a |
||
CM |
Ф |
|||
|
|
|||
При w wo , коли Ia 0 , Ea , спрямована на зустріч U a дорівнює по модулі Ua . Якщо двигун працює до додатка навантаження з wo , то з появою моменту опори mC , w буде знижуватися, що приведе до зниження Ea й збільшення Ia й mЭМ . w буде знижуватися доти, поки mЭМ mC . Різниця
значень сталих швидкостей електропривода до й після додатка навантаження називається статичним падінням швидкості електропривода.
Складові w |
mЭМ Ra |
|
mЭМ Ra |
- падіння w відносне w . |
|
|
|
||||
|
C 2 |
Ф 2 |
|
K 2 |
o |
|
|
|
|||
|
M |
|
|
|
|
w wo w
Природна механічна характеристика - характеристика двигуна, що виходить при відсутності зовнішніх резисторів якірного ланцюга й номінальних значень Ua і Ф . Твердість природної характеристики Е залежить
від га. Опір га включає: власний опір якірної обмотки, опір обмотки додаткових полюсів, компенсаційної обмотки й щітки.
Для природної механічної характеристики w mЭМ Ra
CM2 Ф2
Статичне падіння швидкості при будь-якому додатково включеному реостаті опором гр визначається:
w mЭМ (ra rp )
CM2 Ф2
Або у відносних одиницях:
w |
w |
|
wo w |
|
|
wo |
wo |
||||
|
|
||||
w аналогічно ковзанню АД. |
|||||
Якщо в якірному ланцюзі ДПС включається додатковий резистор, то |
|||||
механічні характеристики - штучні. Вони мають більший нахил до осі моментів і менш тверді.
Механічні характеристики ДПС із послідовним порушенням.
У двигуна послідовного порушення струм якоря одночасно є також
струмом порушення: |
Ib Ia . Магнітний потік Ф змінюється зі зміною |
|||||||||||||
навантаження в широких межах. |
|
|
|
|
|
|
|
|
|
|||||
+ |
|
|
|
U |
|
|
|
|
|
|
|
|
|
|
|
I a |
|
|
ra |
rb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|||
|
|
|
Ea |
|
|
p |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I a |
OB |
|
|
|
|
|
||
Рис.3
Рівняння для електромеханічної характеристики має вигляд як і для двигуна незалежного (паралельного) порушення.
Ea CM Ф w |
|
||
w |
U I a Ra |
, |
(*) |
|
|||
|
CM Ф |
|
|
Ra ra rp rb |
|
||
де rp - опір зовнішнього резистора. |
|
||
У відмінності від ДПС незалежного порушення Ф |
є функцією струму |
||
Ia (крива намагнічування). |
|
||
|
Ф |
|
|
0 |
I a |
Рис.4