

Руководство к решению задач
.pdf11
D = 12 ( D + Dc ) + 12 ( D − Dc ) = E + F ,
где Е = Ес – симметричная часть тензора D, F = -Fc – антисимметричная часть тензора D.
Вычислим их значения
|
|
|
|
|
|
|
E = 1 |
(D + D ) = |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
2 |
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
1 (6e€e€ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
= |
+ 4e€e€ |
+ 4e€ e€ |
+ 6e€ e€ |
+ 6e€e€ |
+14e€ e€ |
+10e€ e€ |
+10e€e€ |
+ |
2e€ e€ |
+ 2e€ e€ ) = |
|||||||||||
|
2 |
1 1 |
1 3 |
3 1 |
2 1 |
1 |
2 |
|
2 |
2 |
|
|
3 1 |
|
1 3 |
|
3 |
2 |
2 |
3 |
|
|
|
=3e€e€ |
+3e€e€ |
+7e€e€ |
+3e€ e€ |
+ 7e€ e€ |
+ e€ e€ |
+ 7e€ e€ |
+ e€ e€ |
= E , |
|
|
|||||||||
|
|
|
|
|
|||||||||||||||||
|
|
|
1 1 |
1 |
2 |
1 3 |
2 1 |
2 |
2 |
|
2 |
3 |
|
3 1 |
3 |
2 |
|
c |
|
|
|
|
|
|
|
|
|
|
F = 1 (D − D ) = |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
2 |
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
1 (4e€e€ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
= |
− 4e€ e€ |
+ 6e€ e€ |
−6e€e€ |
+10e€ e€ |
− |
10e€e€ |
+ |
2e€ e€ |
− 2e€ e€ ) = |
||||||||||||
|
2 |
1 3 |
3 1 |
|
2 1 |
1 |
2 |
|
3 1 |
|
|
1 3 |
|
|
3 |
2 |
|
2 |
3 |
||
|
= −3e€e€ |
−3e€e€ |
+3e€ e€ |
−e€ e€ +3e€ e€ |
+ e€ e€ |
= −F . |
|
|
|||||||||||||
|
|
|
|
||||||||||||||||||
|
|
|
1 |
2 |
|
1 3 |
2 1 |
2 |
3 |
|
3 1 |
|
3 |
2 |
|
|
c |
|
|
||
Проверим правильность ответа |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
E + F =3e€e€ +3e€e€ +7e€e€ +3e€ e€ + |
7e€ e€ |
+ e€ e€ |
|
+ |
7e€ e€ |
+ e€ e€ |
− |
||||||||||||||
|
|
|
1 1 |
|
1 |
2 |
1 3 |
|
2 1 |
2 |
2 |
|
2 |
3 |
|
|
3 1 |
3 |
2 |
|
|
−3e€1e€2 −3e€1e€3 + 3e€2e€1 − e€2e€3 +3e€3e€1 + e€3e€2 =
=3e€1e€1 + 4e€1e€3 + 6e€2e€1 + 7e€2e€2 +10e€3e€1 + 2e€3e€2 = D .
1.5.В трехмерном пространстве расшифровать следующие тензорные
символы: Aii, Bijj, Rij, aiTij, aibjSij.
Решение.
Aii представляет одну сумму:
Aii = A11 + A22 + A33 .
Выражение Bijj представляет три суммы:
1)при i = 1 B111 + B122 + B133 ,
2)при i = 2 B211 + B222 + B233 ,
3)при i = 3 B311 + B322 + B333 .
Выражение Rij представляет девять компонент, которые можно записать в виде матрицы
|
R |
R |
R |
|
|
11 |
12 |
13 |
. |
R = |
R |
R |
R |
|
ij |
21 |
22 |
23 |
|
|
R |
R |
R |
|
|
31 |
32 |
33 |
|
Выражение aiTij представляет три суммы:
12
1) при
2) при
3) при Выражение aibj Sij
j =1 |
a1T11 + a2T21 + a3T31 , |
j = 2 |
a2T12 + a2T22 + a3T32 , |
j = 3 |
a1T13 + a2T23 + a3T33 . |
представляет сумму девяти членов. Первое слагае-
мое по i дает aibj Sij = a1b j S1 j + a2bj S2 j + a3bj S3 j . Затем каждое из этих слагаемых суммируем по j:
aibj Sij = a1b1S11 + a1b2 S12 + a1b3 S13 + a2b1S21 + a2b2 S22 + a2b3 S23 +
+a3b1S31 + a3b2 S32 + a3b3 S33 .
1.6.В трехмерном пространстве вычислить следующие выражения, содержащие дельту Кронекера δij : а) δii , б) δij δij , в) δij δik δjk , г) δij Aik .
Решение.
а) δii = δ11 +δ22 +δ33 =3;
б) δij δij = δ1 j δ1 j + δ2 j δ2 j +δ3 j δ3 j =
δ11δ11 + δ12δ12 + δ13δ13 + δ21δ21 + δ22δ22 + δ23δ23 + δ31δ31 + δ32δ32 + δ33δ33 =
|
|
δ11 + δ22 + δ33 = 3; |
||
|
|
г) δij Aik = δ1 j A1k + δ2 j A2k + δ3 j A3k |
||
при j =1 |
δij Aik |
= δ11 A1k + δ21 A2k + δ31 A3k → δ11 A1k |
||
|
|
при k =1 |
δ11 A11 |
→ A11 |
|
|
k = 2 |
δ11 A12 |
→ A12 |
|
|
k = 3 |
δ11 A13 |
→ A13 |
при j = 2 |
δij Aik |
= δ12 A1k + δ22 A2k |
+ δ32 A3k → δ22 A2k |
|
|
|
k =1 |
δ22 A21 → A21 |
|
|
|
k = 2 |
δ22 A22 → A22 |
|
|
|
k = 3 |
δ33 A23 |
→ A33 |
при j = 3 |
δij Aik |
= δ13 A1k + δ23 A2k |
+ δ33 A3k |
|
k =1 k = 2 k = 3
В результате получим, что δij Aik
δ33 A31 → A31
δ33 A32 → A32
δ33 A33 → A33 .
=Ajk .
1.7. Для тензора Леви-Чивиты εijk непосредственным расписыванием по
индексам показать, что: а) εijk εkij |
= 6, б) εijk ak ak |
= 0. |
Решение. |
|
|
а) Суммируем сначала по i: |
|
|
εijk εkij = ε1 jk |
εk1 j + ε2 jk εk 2 j |
+ ε3 jk εk3 j . |

13
Затем суммируем по j, записывая только отличные от нуля члены:
εijk εkij = ε12k εk12 + ε13k εk13 + ε21k εk 21 + ε23k εk 23 + ε31k εk 31 + ε
Наконец, суммируем по k, опять оставляя только ненулевые члены:
εijk εkij = ε123 ε312 + ε132 ε213 + ε213 ε321 + ε231 ε123 + ε312 ε231 + ε321
=(1)(1)+(−1)(−1)+(−1)(−1)+(1)(1)+(1)(1)+(−1)(−1)= 6.
32k εk 32 .
ε132 =
б) Суммируем по j, затем по k, оставляя ненулевые члены:
εijk a j ak = εi1k |
a1ak + εi2k a2 ak + εi3k a3ak = |
|
= εi12 a1a2 + εi13 a1a3 + εi21 a2 a1 + εi23 a2 a3 + εi31 a3a1 + εi32 a3a2 . |
||
Из этого выражения получим: |
||
при i =1 |
ε1 jk a j ak |
= a2 a3 −a3a2 = 0, |
при i = 2 |
ε2 jk a j ak |
= − a1a3 + a3a1 = 0, |
при i = 3 |
ε3 jk a j ak |
= a1a2 −a2a1 = 0. |
Отметим, что выражение εijk a j ak является индексной формой записи
векторного произведения вектора a самого на себя и, следовательно, должно быть равно нулю a х a = 0.
1.8. Вычислить компоненту f2 |
данных ниже векторов: |
|||||
а) fi = εijkTjk , б) |
fi = |
∂c |
i |
bj − |
∂c j |
bj . |
|
|
∂xi |
||||
|
|
∂x j |
|
|||
Решение. |
|
|
|
|
|
|
а) f2 = ε2 jkTjk = ε213T13 + ε231T31 = −T13 +T31 . |
|
|
||||
б) |
|
|
|
|
|
|
f |
|
= ∂c2 b + ∂c2 |
b + |
∂c2 b − |
∂c1 |
b − ∂c2 b − |
∂c3 b = |
|
|||||||||||||||
|
|
|
|||||||||||||||||||||
|
2 |
∂x |
1 |
∂x |
2 |
2 |
|
∂x |
3 |
∂x |
|
1 |
∂x |
2 |
2 |
∂x |
3 |
|
|||||
|
|
1 |
|
|
|
|
|
|
|
3 |
|
|
2 |
|
|
|
|
2 |
. |
||||
|
|
|
|
|
∂c2 |
|
∂c1 |
b |
+ |
∂c2 − |
∂c3 |
b . |
|
|
|||||||||
|
|
|
= |
− |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
∂x |
|
∂x |
|
|
1 |
|
∂x |
|
∂x |
|
|
3 |
|
|
|
||||
|
|
|
|
|
|
2 |
|
|
|
|
2 |
|
|
|
|
|
|||||||
|
|
|
|
|
1 |
|
|
|
|
|
3 |
|
|
|
|
|
|||||||
1.9. Написать в развернутой форме и по возможности упростить выра- |
|||||||||||||||||||||||
жение Dij xi x j , если: а) |
Dij |
= D ji , б) |
Dij |
= −D ji . |
|
|
|
|
|
|
|
||||||||||||
Решение.
Суммируем сначала по i, затем по j
Dij xi x j = D1 j x1 x j + D2 j x2 x j + D3 j x3 x j =
=D11x1x1 + D12 x1 x2 + D13 x1 x3 + D21 x2 x1 + D22 x2 x2 + D23 x2 x3 +
+D31 x3 x1 + D32 x3 x2 + D33 x3 x3 .
14
Поэтому
а) Dij xi x j = D11(x1 )2 + D22 (x2 )2 + D33 (x3 )2 + 2D12 (x1x2 )+ 2D13 (x1x3 )+ 2D23 (x2 x3 ).
б) Dij xi x j = 0, т.к. D11 = −D11 , D12 = −D21 и т.д.
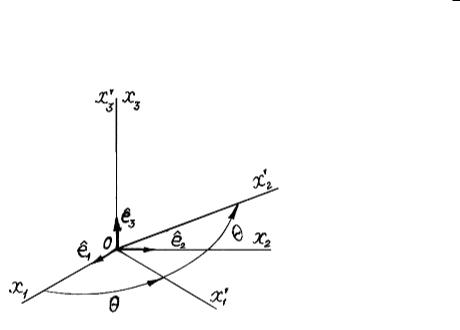
1.10. Оси декартовой системы координат Ox1′x2′ x3 получены поворотом системы Ox1 x2 x3 на угол θ вокруг оси x3 . Определить коэффициенты преобразования aij указанных осей и найти компоненты вектора v = v1e€1 + v2e€2 + v3e€3 в
системесоштрихами.
Решение.
По определению aij = cos(xi′,x j ).
Углы между соответствующими осями указаны на рис. (1.3), что позволяет найти таблицу направляющих косинусов:
Таким образом, тензор преобразования имеет вид
|
cos θ |
sinθ |
0 |
|
|
- sinθ |
cosθ |
0 |
|
A = |
. |
|||
|
0 |
0 |
1 |
|
|
|
Рис. 1.3 |
|
По правилу преобразования векторов |
|
|
получаем |
v1′ = a1 j v j |
= v1 cos θ+ v2 sin θ, |
|
′ |
= a2 j v j |
= −v1 sin θ+ v2 cos θ, |
v2 |
||
v3′ = a3 j v j = v3 .
1.11. Пусть углы между направлениями осей координат системы со штрихами и системы без штрихов даны в следующей таблице:
|
x1 |
x2 |
x3 |
|||
x1′ |
135o |
60o |
120o |
|||
′ |
90 |
o |
45 |
o |
45 |
o |
|
|
|
||||
x2 |
|
|
|
|||
x3′ |
45o |
60o |
120o |
|||
Определить коэффициенты преобразования aij и показать, что выполнены условия ортогональности.

15
Решение.
Коэффициенты aij являются направляющими косинусами и могут быть сразу вычислены в соответствии с данной таблицей углов. Таким образом,
|
|
− |
1 |
1 |
− |
1 |
|
|
|
2 |
2 |
2 |
|
||
|
|
|
|
|
|||
aij |
|
|
0 |
1 |
|
1 |
|
= |
|
2 |
|
2 |
. |
||
|
|
|
1 |
|
|
||
|
|
|
1 |
− |
1 |
|
|
|
|
|
2 |
2 |
2 |
|
|
|
|
|
|
|
Условия ортогональности aij aik |
= δjk требуют, |
чтобы |
выполнялись |
||||
следующие условия: |
|
|
|
|
|
|
|
1) при |
j = k =1 должно быть a11a11 + a21a21 + a31a31 |
=1; левая часть, оче- |
|||||
видно, представляет собой сумму квадратов элементов первого столбца; |
|||||||
2) при |
j = 2 , |
k = 3 |
должно |
быть |
выполнено |
равенство |
|
a12 a13 + a22 a23 + a32 a33 |
= 0 , левая часть которого является суммой произведе- |
||||||
ний соответствующих элементов второго и третьего столбцов; 3) сумма произведений соответствующих элементов любых двух столбцов
должна быть равна нулю; сумма квадратов элементов любого столбца должна быть равна единице.
Если условие ортогональности записано в форме a ji aki = δjk , то вместо
столбцов перемножаются строки.
Указанное выше решение удовлетворяет всем этим требованиям.
1.12. Если Bij – антисимметричный и Aij |
– симметричный тензоры, то |
|||||||||
Aij Bij = 0 . Доказать это. |
|
|
|
|
|
|
|
|||
Решение. |
|
|
|
|
|
|
|
|
|
|
Так как Aij |
= Aji и Bij = −B ji , то Aij Bij = −Aji B ji или |
|||||||||
|
|
Aij Bij + Aji B ji = Aij Bij + Apq Bpq = 0 . |
||||||||
Поскольку |
все |
индексы |
|
являются |
немыми, |
Apq Bpq = Aij Bij , и поэтому |
||||
2Aij Bij = 0, или Aij Bij = 0 . |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
1.13. Для векторов |
a |
= 3e1 + 4e3 , |
b |
= 2e2 −6e3 и диадика |
||||||
|
|
|
|
|
путем перемножения матрицы вычислить |
|||||
D = 3e1 e1 + 2e1 e3 − 4 e2 e2 |
−5e3 e2 |
|||||||||
произведение a D , D b и a D b .
Решение.
Пусть a D = v ; тогда
16
|
|
|
|
|
[v ,v |
|
|
|
|
|
] |
|
|
3 |
0 |
2 |
|
|
|
||||||
|
|
|
|
|
2, |
v |
3 |
= [3,0,4] 0 − |
4 0 |
= [9,−20,6]. |
|||||||||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−5 |
|
|
|
|
|
Пусть D |
|
= |
|
|
; тогда |
|
|
0 |
0 |
|
|
|
|||||||||||||
b |
ω |
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
ω |
|
|
3 0 2 |
0 |
|
|
−12 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
ω2 |
= |
0 |
− 4 0 |
2 |
= |
−8 |
. |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D |
|
|
|
|
|
ω3 |
|
|
0 |
−5 0 |
−6 |
|
−10 |
||||||||||
Пусть |
|
|
= |
|
|
|
= λ; тогда |
|
|
|
|
|
|
||||||||||||
a |
b |
v |
b |
|
0 |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
[λ]= |
[9, − 20, 6] |
|
2 = [−76]. |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−6 |
|
|
|
||
1.14. Найти главные направления и главные значения декартова тензора Т второго порядка, который представлен матрицей
[T |
|
3 |
−1 |
0 |
]= −1 |
3 0 . |
|||
ij |
|
|
|
|
|
|
0 |
0 |
|
|
|
1 |
||
Решение.
Для определения главных значений имеем определитель
3 −λ |
−1 |
0 |
|
|
|
|
|
|
−1 |
3 − λ |
0 . |
|
|
|
|
|
|
|
0 |
0 |
1 − λ |
|
|
|
|
|
|
|
|
|
|
|
|||
Решая его, получим определяющее уравнение |
|
|
|
|
|
|
||
|
(1 − λ)[(3 − λ)2 −1]= 0 . |
|
|
|
|
|
||
Определим корни этого кубического уравнения |
|
|
|
|
|
|||
λ3 −7λ2 +14λ−8 =(λ−1)(λ−2)(λ−4)=0, которые равны λ |
=1, λ |
(2) |
= 2, λ |
(3) |
=4. |
|||
|
|
|
(1) |
|
|
|
||
Пусть теперь ni(1) – компоненты единичного вектора главного направления, соответствующего λ(1) =1. Тогда имеем следующую систему уравнений:
2n(1) − n(1) = 0 |
|
|
|
|||
1 |
2 |
|
|
(1) |
(1) |
|
(1) |
(1) |
= 0 |
|
= 0 , а из условия ni ni =1 получим |
||
−n1 |
+ 2n2 |
|
, откуда n1 |
= n2 |
||
|
0 |
= 0 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
n3(1) = ±1.
17
Для λ(2) = 2 система запишется в виде
n(2) − n(2) = 0 |
|
|
|
|
|
|
||||||
1 |
|
2 |
|
|
|
(2) |
(2) |
(2) |
|
1 |
|
|
|
(2) |
(2) |
|
|
= ± |
, так как ni ni =1. |
||||||
−n1 |
|
+ n2 |
|
= 0 |
, откуда n3 |
= 0 , а n1 |
= n2 |
2 |
||||
|
|
|
−n(2) |
= 0 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||||
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для λ(3) = 4 получаем |
|
|
|
|
|
||||||
− n(3) |
− n(3) |
= 0 |
|
|
|
|
|
|
||||
1 |
|
2 |
|
|
|
(3) |
(3) |
(3) |
|
1 |
|
|
( |
3) |
|
(3) |
= 0 |
|
= ± |
. |
|||||
−n1 |
|
+ n2 |
, откуда n3 |
= 0 , а n1 |
= −n2 |
|
||||||
|
−3n(3) |
= 0 |
|
|
|
|
|
2 |
||||
|
|
|
|
|
|
|
||||||
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ориентация главных осей xi относительно исходной системы xi определяется направляющими косинусами, которые даны в следующей таблице:
|
|
x1 |
|
x2 |
x3 |
x1* |
|
0 |
|
0 |
±1 |
x2* |
± |
1 |
± |
1 |
0 |
|
2 |
2 |
|||
x3* |
m |
1 |
± |
1 |
0 |
|
2 |
2 |
Отсюда видно, что матрица тензора преобразования такова:
|
|
|
|
|
|
|
0 |
|
0 |
±1 |
|
|
1 |
± |
1 |
0 |
|
A = ± |
2 |
2 |
. |
||
|
|
|
|
||
|
1 |
± |
1 |
0 |
|
m |
2 |
2 |
|
||
|
|
|
|
||
1.15. Показать, что матрица тензора T ij |
задачи 1.14 может быть приве- |
||||||||||||||||||
дена к диагональной (главной) форме преобразованием T * |
= a |
ip |
a |
jp |
T |
pq |
. |
||||||||||||
|
|
|
|
|
|
|
|
|
|
ij |
|
|
|
|
|
||||
Решение. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
]= |
|
0 |
0 |
1 |
3 |
−1 0 0 1 |
2 |
|
−1 2 |
|
|
|
||||||
* |
|
1 2 1 |
2 |
|
|
|
|
1 |
2 |
1 2 |
|
|
= |
|
|||||
[Tij |
|
0 |
−1 3 |
0 0 |
|
|
|
||||||||||||
|
|
|
|
2 |
|
|
0 |
|
|
0 |
|
|
0 |
|
|
|
|
|
|
|
|
−1 2 1 |
0 |
0 |
1 1 |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
18 |
|
|
|
|
|
|
|
|
0 |
0 |
1 |
0 1 |
2 |
−1 2 |
|
|
1 0 |
0 |
||
|
2 |
|
|
|
1 |
2 |
1 2 |
|
= |
|
|
|
= |
2 0 |
0 |
|
0 |
2 0 . |
|||||||
|
|
|
|
|
|
0 |
0 |
|
|
|
0 |
|
− 2 2 2 2 0 |
1 |
|
|
|
0 |
4 |
||||||
Задачи для самостоятельного решения
1.16.Для произвольных векторов a и b показать, что
λ=( a ×b ) ( a ×b ) +( a b )2 =( ab )2 .
••
1.17.Пусть u = ω×u и v = ω×v ; показать, что
ddt ( u ×v ) = ω×( u ×v ) .
1.18. Для симметричного тензора |
|
|
|
||
|
|
7 |
3 |
0 |
|
Tij |
|
3 |
7 |
4 |
|
= |
. |
||||
|
|
0 |
4 |
7 |
|
|
|
|
|||
Определить главные значения и направления главных осей.
1.19. Если |
|
|
|
= 0 , |
|
|
|
|
• |
|
• |
|
|
|
•• |
|||||||||||
|
|
|
|
× |
|
= |
|
|
и |
|
× |
|
= − |
|
. Показать, что ∆ |
|
= |
|
. |
|||||||
|
v |
|
v |
w |
|
v |
v |
v |
v |
|||||||||||||||||
1.20. Преобразование, связывающее |
системы |
координат Ox1′x2′ x3′ и |
||||||||||||||||||||||||
Ox1 x2 x3 задано таблицей: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x2 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
x1 |
|
|
|
x3 |
|||||||||
|
|
|
|
|
|
|
x1′ |
|
|
+3 / (5 2) |
1/ 2 |
|
4 / (5 2) |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
′ |
|
|
4 / 5 |
|
|
0 |
|
−3 / 5 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
x2 |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
x3′ |
|
|
|
−3 / (5 2) |
1/ 2 |
−4 / (5 2) |
|
|
|
|
|
||||||||
а) Показать, что выполнены условия ортогональности.
б) Определить в системе со штрихами координаты точки, имеющие ра-
|
|
|
|
|
|
|
|
диус-вектор |
|
= 2 e1 |
−e3 . |
|
|||
r |
|
||||||
Ответ: б) 2 / 5 |
2 , |
11 |
, − 2 / 5 2 . |
||||
|
5 |
|
|||||
|
|
|
|
|
|
||

19
Раздел 2
Равновесие сплошной среды
ОсновноезначениевравновесиисплошнойсредыимеютравенстваКоши.
pn€ = n1 p1 + n2 p2 + n3 p3 . |
(2.1) |
Векторы напряжений p1 , p2 , p3 , приложенные к координатным пло-
щадкам, не имеют объективного физического смысла, так как зависят от выбора системы координат.
Проекция равенства (2.1) на оси координат дает три равенства:
pn1 |
= n1 p11 + n2 p21 + n3 p31 , |
|
pn2 |
= n1 p12 + n2 p22 + n3 p32 , |
(2.2) |
pn3 |
= n1 p13 + n2 p23 + n3 p33 . |
|
В этих равенствах первый индекс при р отмечает принадлежность напряжения к площадке, перпендикулярной к данной оси координат, второй – ось проекций. Они позволяют вычислить напряжение pn на любой площадке,
если известна ее ориентация n€ .
Если использовать операции умножения тензора на вектор справа или
слева, то получим (2.1) в следующем виде |
|
||
pn = P* n€ = n€ P . |
(2.3) |
||
Уравнение статики сплошной среды «в напряжениях» в символической |
|||
форме |
|
||
Div P +ρ |
|
= 0 , |
(2.4) |
f |
|||
где P – тензор напряжений,
ρ – плотность сплошной среды,
f– объемная (массовая) сила.
Впроекциях на декартовы координатные оси (2.4) приводится к системе трех дифференциальных уравнений в частных производных относительно компонент тензора напряжений.
∂p11 |
+ |
|
∂p12 |
+ |
|
∂p13 |
|
+ρf1 = 0 , |
|
||
|
|
|
|
|
|
||||||
∂x1 |
|
∂x2 |
|
∂x3 |
|
||||||
∂p21 |
+ |
|
∂p22 |
+ |
|
∂p23 |
+ρf2 = 0 , |
(2.5) |
|||
|
|
|
|||||||||
∂x1 |
|
∂x2 |
|
∂x3 |
|
||||||

20
∂p31 |
+ |
∂p32 |
+ |
∂p33 |
+ ρf3 = 0 . |
|
|
|
|||
∂x1 |
∂x2 |
∂x3 |
|||
Для идеально текучей среды, в которой касательные напряжения отсутствуют, т.е.
p12 = p21 = p23 = p32 = p13 = p31 = 0 ,
а для нормальных напряжений справедливо равенство p11 = p22 = p33 = −p ,
уравнение равновесия (2.4) примет вид
p f = grad p ,
что в проекциях на оси дает |
|
|
|
|
|
|
|
|
|
|
сf1 = |
∂p |
|
сf2 = |
∂p |
|
сf3 = |
∂p |
|||
|
, |
|
|
, |
|
|
. |
|||
∂x |
∂x |
2 |
∂x |
3 |
||||||
|
1 |
|
|
|
|
|
|
|
||
(2.6)
(2.7)
В случае если объемная сила |
|
|
|
= |
|
|
, то уравнение (2.6) запишется так: |
|||||||||||||
f |
g |
|||||||||||||||||||
|
|
|
|
|
|
с |
|
= grad p . |
|
|
|
(2.8) |
||||||||
|
|
|
|
|
|
g |
|
|
|
|||||||||||
В точке М нормальная составляющая σN |
вектора напряжения имеет |
|||||||||||||||||||
величину |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
σN |
= pi ni = |
|
n n€ = σij ni n j , |
(2.9) |
||||||||||||||
|
|
p |
||||||||||||||||||
а квадрат величины касательной компоненты получается как разность |
|
|||||||||||||||||||
|
|
|
|
|
σS |
2 |
|
= pi pi −σN |
2 . |
|
|
(2.10) |
||||||||
Разложение тензора напряжений на шаровой и довиатор напряжений |
||||||||||||||||||||
описывается формулами |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
σ |
ij |
= δ |
ij |
|
σkk |
|
+ s |
ij |
или P = σ |
|
I + P . |
(2.11) |
||||||||
3 |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
D |
|
|||||
Главные значения девиатора напряжений равны |
|
|
|
|||||||||||||||||
|
|
|
|
|
sk |
= σk −σM . |
|
|
|
(2.12) |
||||||||||
Примеры решения задач
2.1. Тензор напряжений в точке М задан так:
|
6 |
0 |
−3 |
|
|
0 |
5 |
0 |
|
P = |
. |
|||
|
−3 |
0 |
4 |
|
|
|