

Teoriya avtomatichnogo keruvannya
.pdf
М. Г. Попович, 0. В. Ковальчук
Ш
АВТОМАТИЧНОГО
Затверджено Міністерством освіти і науки України
Підручник для студентів вищих технічних
навчальних закладів
Видання друге, перероблене і доповнене
Київ
Ипбідь"
ЛЮ7
Б Б К 32.965я73 П58
Автори:
М. Г. Попович (передмова, гл. 1—5, гл. 6 параграфи 6.1—6.8);
0.Ковальчук (гл. 6 параграфи 6.9—6.13, гл. 7—12)
Ре ц е н з е н т и :
чл.-кор. НАН України, д - р техн. наук, проф. /. В. Волков,
д- р техн. наук, проф. В. І. Сенько,
д- р техн. наук, проф. Ю. А. Скрипник
Затверджено Міністерством освіти і науки України
(лист № 14/18.2-828 від 30.03.06)
Видано за рахунок державних коштів. Продаж заборонено
Редакція літератури з природничих і технічних наук Головний редактор Т. В. Ковтуненко
Редактор Т. В. Кацовенко
Попович М. Г., Ковальчук О. В.
П58 Теорія автоматичного керування: Підручник. — 2-ге вид., перероб.
ідогі. — К.: Либідь, 2007. — 656 с.
ІЗ І ^ 978-966-06-0447-6.
Викладено основи теорії лінійних і нелінійних безперервних і дискретних систем автоматичного керування, розглянуто загальні питання автоматизації, методи математичного описання, дослідження стійкості, поліпшення якості, корекції та синтезу систем. Висвітлено сучасні теоретичні питання чутливості, керованості та спостережуваності, оптимальні й адаптивні системи, випадкові
процеси |
в системах. |
|
Для |
студентів вищих технічних навчальних закладів. |
|
|
|
ББК 32.965я73 |
|
|
© М. Г. Попович, О. В. Ковальчук, 1997 |
І8В!\ 978-966-06-0447-6 |
© М. Г. Попович, О. В. Ковальчук, 2007, зі змінами |
|
Передмова
Д |
|
|
«Теорія |
автоматичного |
керування» |
||||
исципліна |
|||||||||
с |
одні сю з |
базових у навчальних планах ряду |
|||||||
бакалаврських програм підготовки студентів багатьох |
|||||||||
спеціальностей та спеціалізацій у вищих навчальних |
|||||||||
закладах України. |
Особливе значення |
теорія |
|
||||||
автоматичного |
керування |
мас |
|
для |
спеціальності |
|
|||
«/ 'лектромеханічні |
системи |
автоматизації |
та |
|
|||||
електропривод», |
|
найчисельнішої |
у |
напрямі |
|
|
|||
«Електромеханіка». |
Для |
цієї |
спеціальності |
теорія |
|||||
автоматичного |
керування |
становить |
теоретичну |
базу |
|||||
багатьох спеціальних дисциплін: «Теорія електроприводу», «Системи керування електроприводами» та дисциплін
завтоматизації технологічних процесів, моделювання
електромеханічних |
систем. |
|
|
||
У |
даному підручнику |
відображено |
основні |
питання |
|
теорії |
автоматичного |
керування, необхідні |
спеціалістам |
||
з автоматизації |
виробничих процесів |
і промислових |
|||
установок. |
|
|
|
|
|
Матеріал викладено в такій послідовності: розглядаються загальні принципи побудови систем
автоматичного |
керування |
|
|
|
|
|
|||
і |
регулювання, |
типові динамічні |
ланки |
та |
їхні |
|
|||
характеристики, |
математичний |
опис |
систем |
керування |
|||||
(у |
вигляді |
диференціального рівняння |
відповідного порядку, |
||||||
структурної |
схеми, |
системи |
диференціальних |
рівнянь |
|||||
першого порядку в |
нормальній |
формі |
Коші |
|
|
||||
її |
у векторно-матричній формі), |
методи |
визначення |
||||||
З
Передмова
статичних |
і |
динамічних |
характеристик |
систем, |
а також |
||||||
питання стійкості. |
Особливу |
|
увагу |
приділено аналізу |
|||||||
якості систем |
в |
усталених |
і |
перехідних |
режимах |
||||||
та |
методам |
її підвищення. |
|
|
|
|
|
|
|||
|
Більшість |
систем автоматичного |
керування |
|
|||||||
є |
нелінійними, |
але |
при |
дослідженні |
їх |
звичайно |
|
||||
лінеаризують |
і застосовують методи лінійної теорії. |
||||||||||
Системи |
із |
суттєвими |
нелінійностями лінеаризувати |
||||||||
не |
можна. |
Тому значну |
увагу |
приділено |
також |
нелінійним |
|||||
системам, |
особливостям |
їх |
динаміки, |
методам |
|
||||||
дослідження |
стійкості, |
автоколивань |
та |
корекції. |
|||||||
Останнім часом все більшого поширення набувають дискретні (в основному цифрові) системи автоматичного керування. Принципам побудови та дослідження таких систем присвячено окрему главу, в якій розглядається математичний апарат для дослідження імпульсних систем
автоматичного |
керування, передаточні |
функції |
та частотні |
характеристики, а також |
питання |
стійкості й якості. Достатньо уваги приділено цифровим системам автоматичного керування та синтезу цифрових
регуляторів. |
|
|
|
|
|
|
Теоретичною |
основою |
розробки |
перспективних |
|||
високоточних автоматичних систем є теорія |
||||||
інваріантності |
та |
комбінованого |
керування, |
оптимальних |
||
і адаптивних систем. Усі ці питання також |
||||||
розглядаються |
у |
підручнику. |
|
|
|
|
В інженерній практиці все більше уваги приділяється |
||||||
статистичним |
методам |
розрахунку |
систем |
|||
автоматичного |
керування, |
тому |
в |
підручнику |
||
розглядаються |
характеристики |
випадкових |
процесів, |
|||
методи розрахунку точності та синтезу систем |
||||||
автоматичного |
керування |
при |
випадкових |
вхідних |
||
ізбурюючих діях.
Удругому переробленому й доповненому виданні книги стисло висвітлено суть ряду нових наукових напрямів: методи фаззі-логіки, нейронних сіток, генетичних алгоритмів. Враховуючи вимоги до інтенсифікації
самостійної роботи студентів під |
час вивчення дисципліни, |
|||
в кожній главі |
підручника |
наведено |
приклади |
розв 'язування |
різних задач з |
конкретних |
електромеханічних |
систем |
|
4
Передмова
автоматичного керування або |
їхніх |
окремих |
елементів, |
|
а також |
контрольні запитання |
та |
завдання. |
|
При |
написанні підручника автори |
виходили |
з того, |
|
що студенти знайомі з прямим і зворотним перетворенням Лапласа для безперервних функцій та з матричним
численням. |
Тому |
у |
відповідних розділах книги |
надаються |
||||
лише короткі відомості про застосування методів цих |
||||||||
розділів |
вищої математики. |
Більш |
детально |
викладено |
||||
математичний апарат для дослідження імпульсних і |
||||||||
цифрових |
систем |
автоматичного |
керування, |
зокрема |
||||
основи |
дискретного |
перетворення |
Лапласа. |
|
|
|||
Підручник розрахований головним чином на студентів |
||||||||
електромеханічного |
|
напряму, |
проте може |
бути корисним |
||||
студентам |
інших |
спеціальностей, |
пов 'язаних |
|
||||
з автоматизацією |
|
технологічних |
процесів |
та |
установок. |
|||
Глава ЗАГАЛЬНІ ВІДОМОСТІ
ПРО СИСТЕМИ АВТОМАТИЧНОГО КЕРУВАННЯ
1.1
Основні поняття
Під автоматизацією розуміють проведення тих чи інших операцій без участі людини або з обмеженою її участю. У першому випадку процеси називають автоматични-
ми, а в другому — автоматизованими. Корінь наведених термінів «авто» походить від давньогрецького слова «аутос», що означає «сам», «самостійний».
Під автоматикою розуміють сферу науки й техніки, яка займається розробкою теоретичних методів і технічних засобів (елементів і систем), що забезпечують розв'язання завдань дослідження, виготовлення й експлуатації окремих установок і технологічних комплексів на основі їх автоматизації.
Автоматизований (автоматичний) процес може бути досить простим (наприклад, забезпечення сталого рівня рідини в деяких посудинах) і досить складним (забезпечення потрібного режиму роботи літака за допомогою автопілота).
При автоматизованому (напівавтоматичному) режимі роботи установки (механізму, машини), яку в загальному випадку називають об'єктом автоматизації, функція людини здебільшого зводиться до вмикання об'єкта або до виконання окремих ручних операцій.
Основні переваги автоматизації полягають у можливостях забезпечити:
•зростання продуктивності та поліпшення умов праці;
•виконання робіт у важкодоступних чи взагалі недоступних для людини сферах (радіоактивні зони, космос, окремі види металургійного та гірничого виробництва);
•підвищення точності, якості технологічних процесів і відповідних виробів;
б
1.1.Основні поняття
•зростання надійності та техніко-економічних показників і загальної культури виробництва та кваліфікації обслуговуючого персоналу.
Автоматизація ефективно застосовується на сучасному етапі розвитку людства для досягнення зростання показників ресурсота енергозбереження, поліпшення екології довкілля, якості та надійності продукції.
Автоматизація виробництва здійснюється за допомогою автоматичних пристроїв, які можна класифікувати за різними ознаками (при цьому під «пристроєм» розуміють закінчену конструкцію, яка може діяти самостійно).
Однією з найпоширеніших є класифікація за функціональним при значенням, згідно з якою виділяють такі автоматичні пристрої: автоматичного контролю та сигналізації, автоматичного захисту, об- чііслювально-лічильні, блокуючі, автоматичного керування.
П р и с т р ої автоматичного контролю та сигналізації забезпечують
контроль за перебігом технологічних процесів, станом приміщень та відповідну сигналізацію. І Іри нормальних умовах процесів використопупьен оптична сигналізація, а при появі відхилень від цих умов — оіпична іі акустична сигналізація. Як приклад можна навести автоматичні пристрої контролю тиску газу в магістралях, напруги і навантаження в електромережах.
Пристрої автоматичного захисту забезпечують захист об'єктів при появі загрози для обладнання, продукції або обслуговуючого пер-
• опалу. Наприклад, електричний захист (струмовий, за напругою), іпчип від перевищення швидкості на підіймальних установках, електричний захист від замикань на ґрунт, газовий захист масляних
і*чектроїрапсформаторів тощо. |
|
|
|
|
||
( ірумовиіі захист бувас: максимальний |
(захист від різкого пере- |
|||||
пни іпжения |
або короткого з а м и к а н н я ) |
і |
тепловий (від поступового |
|||
пі/ініпііеннн температури нагрівання |
електричних приладів за догіус- |
|||||
іимі межі) |
іахпсі |
за напругою полягає |
у вимкненні електричних |
|||
ус і пі юнок |
при імєі п пенні напру і и до 0,65 від н о м і н а л ь н о ю з н а ч е н н я |
|||||
(МШІМаїІ.НІїП ІПЧІІСі) ПІН) ІЇОШЮМу II |
II11! КІКМ 111 і (нульовий захист). |
|||||
ООчін іюва іьно |
йчи їьш ирие ірої |
спмос тіїіпо (без участі |
л ю д и н и ) |
|||
иикоиуіоііі |
с і ча /і 111 ро ір.ічупмі орОіі |
супутників, ракет, |
пайвигід - |
|||
ш ш п ч |
іечію юі ічініч ре і 11 м і в роОоти, експрес |
аналізи та |
ін. |
||
І* н т у т ч і мрім ірої манні, |
п р и з н а ч е н н я не |
допускати |
в и к о н а н н я |
||
НІ мін |
і оман і < 11.1111) 111 |
І гі, |
команд на в и к о н а н н я «зустрічних» мар - |
||
ш р у т » |
нп однокоіїїннич |
шпччач залізничного |
транспорту). |
||
7
Глава 1 |
ЗАГАЛЬНІ ВІДОМОСТІ ПРО СИСТЕМИ |
|
АВТОМАТИЧНОГО КЕРУВАННЯ |
Пристрої автоматичного керування забезпечують бажані зміни в ході процесів. Це — найскладніші і дуже поширені пристрої автоматики, теорія роботи яких і становить предмет вивчення курсу «Теорія автоматичного керування».
1.2
Короткі історичні відомості про розвиток автоматики,
теорії автоматичного керування та кібернетики
ТТ^важають, що автоматика є порівняно молодим на- Ю>прямом розвитку науки й техніки. Однак відомо, що ідеї автоматики і нескладні автоматичні пристрої використовува-
лися ще в давні часи в Єгипті, Греції та інших країнах. Так, жерці Єгипту користувалися різними автоматичними пристроями при спорудженні пірамід і храмів.
Про «залізну людину» феодала Альберта Великого, яка виконувала функції швейцара — відчиняла і зачиняла двері приймальної зали, відомо із середніх віків.
Проте автоматичні пристрої того часу ще суттєво не впливали на загальний розвиток людства і його продуктивних сил.
Першим автоматом, який мав помітний вплив на цивілізацію, був годинник. Для підвищення точності ходу годинників було розроблено відповідні регулятори: поплавковий — для водяних годинників і маятниковий (1675 р., голландський фізик і математик X. Гюйгенс) — для механічних.
Інтенсивний розвиток автоматики почався в XVIII — XIX ст. у зв'язку з промисловим переворотом в Європі, пов'язаним з використанням енергії пари.
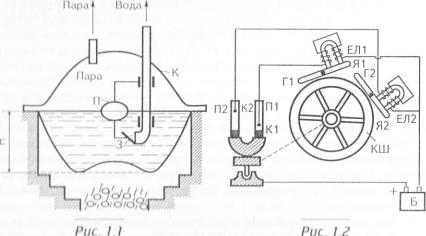
Першим промисловим регулятором того часу був поплавковий регулятор, розроблений І. 1. Ползуновим для «вогнедіючої машини» (парового котла), яку він побудував у 1765 р. у м. Барнаулі.
Принципову спрощену схему машини Ползунова з поплавковим регулятором рівня води у паровому котлі К показано на рис. 1.1. При підвищенні витрат пари рівень води Я знижувався, поплавок П опускався і діяв на замикач 3, збільшуючи надходження води в котел.
8
1.2. Короткі історичні відомості про розвиток автоматики, теорії автоматичного керування та кібернетики
Мри зменшенні витрат пари надходження води в котел зменшувапоея. І Іе давало змогу різко зменшити коливання рівня води в котлі га рівня тиску пари.
І Іа принципі зміни керованих технологічних параметрів залежно від їх відхилення відносно заданого значення в 1784 р. англійський механік Дж. Уатт побудував відцентровий регулятор швидкості парової машини.
Принцип керування за відхиленням величини від заданого значення, відомий як принцип Ползунова—Уатта, дістав поширення в сучасній техніці.
V І830 р. Шиллінг у розробленому ним телеграфі запропонував вперше електромагнітне реле, яке дістало практичне застосування в різних сферах промисловості.
У 1854 р. російський військовий інженер К. І. Константинов створив перший електромагнітний регулятор швидкості переміщення іарматпих башт військово морських суден, який мав велике зна-
ченім |
СІМ |
11 ГІ П11111' 111II И І У Ч І К К II п швидкодії морської артилерії |
(рів І |
') |
Ко ймо НІКІМ КІМ, сїишучене з гарматною баштою, при її |
иінр і П І Н І |
11 рі і ін »і і ги» в і ію і їв і ему Ггдпапих посудин III і П2, запо- |
|
їни чиї |
ріуммі Мри ижп.іпеїпп швндкос і і обертання гарматної баш- |
|
9