

3.2. Рекуперативное торможение асинхронных двигателей
В судовых условиях рекуперативное торможение наступает в двух случаях:
1. всякий раз при переходе с большей скорости на меньшую;
2. при спуске тяжелого груза.
Рассмотрим оба случая поочередно.
Рекуперативное торможение при переходе с большей скорости на меньшую
Режим генераторного рекуперативного торможения возникает при переключении асинхронного двигателя с большой скорости на меньшую путем изменения числа пар полюсов или уменьшения частоты питающего тока.
При этом синхронная скорость на новой характеристике (одинарная звезда, точка D) становится меньшей рабочей скорости двигателя (в точке А), благодаря чему на участке BCD двигатель кратковременно работает в режиме рекуперативного торможения. Затем от скорости в точке D до скорости в точке E двигатель переходит в двигательный режим и затормаживается под действием разности тормозного статического и движущего электромагнитного моментов.
Рассмотрим процесс рекуперативного торможения на примере перехода с «двойной звезды» на «звезду» (рис. 9.20).
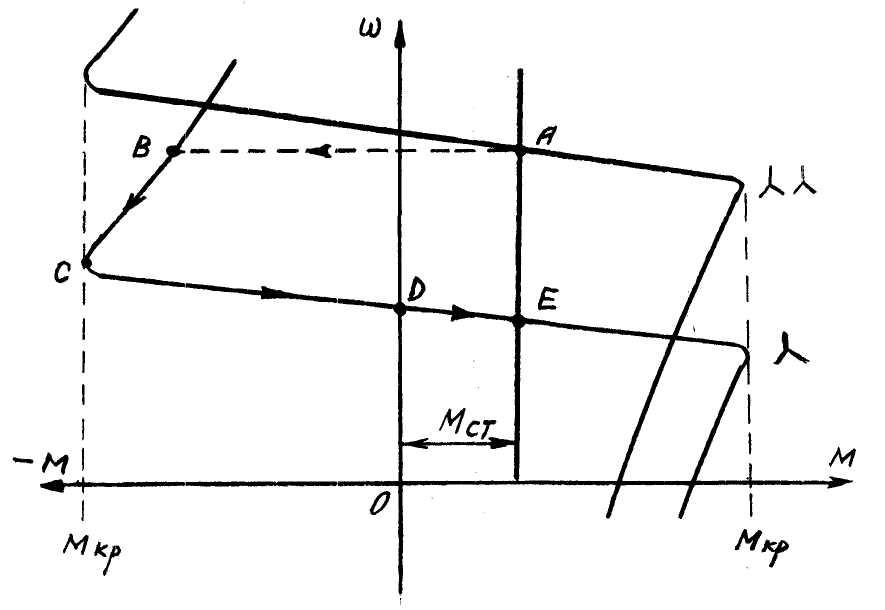
Рис. 9.20. Рекуперативное торможение при переходе с «двойной звезды» на «звезду»
Перед
началом торможения двигатель работает
в точке «А» в установившемся режиме,
при котором вращающий электромагнитный
момент двигателя равен тормозному
статическому механизма, М = М ,
скорость двигателя постоянна и
соответствует точке «А». Например, пусть
частота вращения ротораn
= 2940 об / мин, а скорость вращения магнитного
поля обмотки статора n
,
скорость двигателя постоянна и
соответствует точке «А». Например, пусть
частота вращения ротораn
= 2940 об / мин, а скорость вращения магнитного
поля обмотки статора n =
3000 об / мин, т.е. ротор, отстает от магнитного
поля.
=
3000 об / мин, т.е. ротор, отстает от магнитного
поля.
Для торможения двигателя отключают обмотку «двойной звезды» и включают обмотку «звезды». Двигатель при постоянстве скорости ( n = 2940 об / мин ) переходит из точки «А» в точку «В».
На
«звезде» скорость вращения магнитного
поля обмотки статора n =
1500 об / мин, а сам ротор по инерции
вращается с прежней скоростью n
= 2940 об / мин, т.е. обгоняет магнитное поле
обмотки статора. Начиная с точки «В» и
на участке «ВСD»
асинхронный двигатель переходит в
генераторный режим, преобразуя
механическую энергию, получаемую от
движущихся масс привода, в электрическую,
возвращаемую в судовую сеть.
=
1500 об / мин, а сам ротор по инерции
вращается с прежней скоростью n
= 2940 об / мин, т.е. обгоняет магнитное поле
обмотки статора. Начиная с точки «В» и
на участке «ВСD»
асинхронный двигатель переходит в
генераторный режим, преобразуя
механическую энергию, получаемую от
движущихся масс привода, в электрическую,
возвращаемую в судовую сеть.
При этом знак электромагнитного момента двигателя изменяется на противоположный, т.е. этот момент становится тормозным.
. Поэтому,
начиная с точки «В», к валу двигателя
приложены два тормозных момента –
статический М механизма
и электромагнитный М момент двигателя.
механизма
и электромагнитный М момент двигателя.
Под
совместным действием этих моментов
двигатель быстро уменьшает
скорость ротора
по траектории «ВСD»,
причем в точке «D»
скорость ротора уменьшается до скороcти
вращения магнитного поля обмотки статора
n =
1500 об / мин.
=
1500 об / мин.
Поскольку в точке «D» скорости ротора и магнитного поля одинаковы, двигатель в этой точке переходит режим идеального холостого хода, его электромагнитный момент М = 0.
Однако
в точке «D»
к валу двигателя остается приложенным
второй тормозной момент – статический
момент механизма М .
Под действием М
.
Под действием М скорость
ротора продолжает
уменьшаться,
и на отрезке «DE»
станет меньше
скорости магнитного поля обмотки
статора.
Двигатель перейдет из режима идеального
холостого хода в обычный двигательный
режим, причем переходный процесс
закончится в точке «Е». В точке «Е»
наступает равновесие моментов М
скорость
ротора продолжает
уменьшаться,
и на отрезке «DE»
станет меньше
скорости магнитного поля обмотки
статора.
Двигатель перейдет из режима идеального
холостого хода в обычный двигательный
режим, причем переходный процесс
закончится в точке «Е». В точке «Е»
наступает равновесие моментов М и
динамического при установившемся
значении скорости.
и
динамического при установившемся
значении скорости.
Особенности торможения:
торможение наступает при условии: ротор обгоняет магнитное поле обмотки статора, т.е. n > n
 ;
;
2. при торможении асинхронный двигатель работает как асинхронный генератор, преобразуя механическую энергию, получаемую от движущихся масс привода, в электрическую (при этомэлектрическая энергия возвращается в судовую сеть);
3. тормозной момент на валу двигателя сохраняется только на отрезке «ВСD» механической характеристики «звезды»;
4. рекуперативное торможение при переходе с большей скорости на меньшую скорость широко применяется в электроприводах судовых грузоподъемных устройств, для предварительного сброса скорости перед основным, механическим торможением.
.