

Диссер
.pdfультразвуковых. В связи с этим возникает эффект уменьшения времени пробега импульса в ОК. Фронт УЗ импульса растягивается. Если не принять меры по компенсации рассмотренной погрешности, то при измерении изделий из нержавеющей стали толщиной 10 мм погрешность может достигать 19% на поперечных и 11% на продольных волнах, если выполнять измерение на высоте 6 дБ от максимума эхосигнала. В материалах с хорошей электропроводностью погрешность уменьшается соответственно до 0,55 и 0,27% [14].
Влияние анизотропии на погрешность измерения.
В связи с тем, что анизотропия проката проявляется в различных значениях скорости распространения сдвиговых УЗ волн в направлении вектора смещений в волне, то это может вызвать дополнительную погрешность при измерении толщины при помощи ЭМАП, использующих сдвиговые волны
[31]. В работе [31] были исследованы образцы проката в диапазоне толщин
0,3-50 мм из сплавов алюминия, латуни, титана, углеродистой и коррозионно-
стойкой стали. Разность в значении скорости сдвиговой волны вдоль направления прокатки для образцов из сплава алюминия составила 2,6%,
сплава М1 - 3,8%, сплава ЛС 62 - 3,5%, стали 12Х18Н10Т – 3,1%, сплав ВТ1 – 4,1%. Поэтому в [31] рекомендуется для измерения толщины материалов, с
высокой степенью анизотропии использовать ЭМАП с радиальной поляризацией. Если направление прокатки заранее известно, то возможно использовать ЭМАП с линейной поляризацией, для этого необходимо ориентировать преобразователь с линейной поляризацией вдоль или поперек направления прокатки. Для неферромагнитных проводящих материалов лучше использовать ЭМАП продольной волны, поскольку продольная волна менее чувствительна к анизотропии.
1.2.История исследования ЭМА преобразования и создания толщинометрической аппаратуры на его основе.
История использования ЭМА преобразования насчитывает уже более
80 лет. Приоритет в этом направлении принадлежит советским (ныне принято говорить российским) ученым. Впервые, в 1933 году Б. Остроумовым и Л.
11
Плотовским ЭМА метод был использован для возбуждения свободных упругих колебаний в металлических стержнях, в 1939 году Р.Рэндалом и др.
для контроля величины зерна [7]. После этого многими исследователями в нашей стране и за рубежом ЭМА метод использовался в экспериментальных целях. За последние 50 лет в нашей стране теоретические исследования были проведены В.М. Конторовичем и сотрудниками, Кагановым М.И., Шкарлетом Ю.М., Шубаевым С.Н., Харинотоновым А.В., Ильиным И.В., Буденковым Г.А., Гуревичем С.Ю., Комаровым В.А., Мужицким В.Ф.и другими. [7]. Ю.М
Шкарлет разработал общую теорию возбуждения акустических колебаний полями гармонических сил различной физической природы, в том числе и ЭМА преобразования. Шубаевым С.Н. разработана подробная теория расчета ЭМАП для работы с электропроводящими материалами [40,41]. Харитонов В.А. и Ильин И.В. наиболее подробно разработали теорию ЭМА для ферромагнетиков применительно к поверхностным волнам [11,12].
Буденковым Г.А. и Гуревичем С.Ю. разработана теория расчета ЭМА преобразования на основе использования функций Грина [7]. Гуревичем С.Ю.
разработана теория ЭМАП для высокотемпературного контроля ферромагнитных изделий [10]. Мужицким В.Ф., Комаровым В.А., Гуревичем С.Ю. разработана теория физических полей, которая учитывает связанность всех типов физических колебаний в среде и позволяет производить более точный расчет, учитывающий взаимное влияние квазиупругих и квазиэлектромагнитных колебаний при ЭМА преобразовании [17]. За рубежом исследования ЭМА преобразования проводились Доббсом Е.Р., Груббиным,
Томпсоном Р.Б. , Кавашимой К., Оги Х. и Хирао М. [7],[45]. Следует отметить,
что многие исследования отечественных ученых выполнялись раньше и с большей проработанностью, чем зарубежных коллег, но остаются неизвестными за рубежом и в настоящее время. Причиной, по мнению автора,
является отсутствие публикаций этих работ в англоязычных журналах и на международных конференциях.
12
Активное практическое внедрение технологий НК использующих ЭМА преобразование началось в 70-х годах. Коллективами УНЦ АН СССР
Свердловск, Челябинского политехнического института, Ленинградского электротехнического института, Кишиневского ВНИИНКа, НПО «Спектр» проводились работы по созданию аппаратуры для практического использования метода [7]. Одной из первых публикаций о промышленном применении ЭМА метода для высокопроизводительного контроля рельсов,
явилось сообщение Лончака В.А. в 1970 году [19]. Для толщинометрии труб диаметром 25 мм и более, изготовленных из углеродистых и низколегированных сталей в 1973 году была разработана промышленная установка [8]. В установке использовался эхо-импульсный метод на сдвиговых волнах, подмагничивание создается импульсным электромагнитом
(длительность подмагничивания 1,1 мс). Максимальный рабочий зазор между ЭМАП и ОК 1,5 мм. Диапазон измерения толщин 3-50 мм с точностью 2%. В 1974 году разработан и внедрен в эксплуатацию на Челябинском станкостроительном заводе малогабаритный толщиномер ТЭМАЦ-1, диапазон измерений 1,5-30 мм с точностью 1% [6]. В середине 70-х годов в НИИН разработаны и внедрены автоматизированные толщинометрические установки для контроля листов УТ-40Б и труб УТ-80Б [7,15]. УТ-40Б позволяла контролировать металлические листы толщиной 0,5-6 мм с погрешностью 2%.
УТ-80Б имела 4-ре независимых канала и была предназначена для контроля черных труб диаметром от 30 до 146 мм толщиной от 3 до 15 мм с погрешностью 2%. В этих установках использовались ЭМАПы с постоянными магнитами.
В середине 80-х годов были разработаны постоянные магниты на основе соединений самария и кобальта, а затем на основе ниодима, железа и бора, что позволило повысить индукцию в несколько раз и разработать малогабаритные ЭМА преобразователи для ручных универсальных ЭМА толщиномеров.
Размеры малогабаритного ручного толщиномера, описанного в [9] составляют
120х120х50 мм, диапазон измеряемых толщнин 5-100 мм, точность ±2%,
13
максимальный зазор 0,5 мм, масса 0,8 кг. Подобные массогабаритные характеристики удалось получить за счет использования современной элементной базы (конца 80-х годов): больших интегральных схем,
сильноточных транзисторных ключей, малошумящих интегральных услилителей. Дальнейшее развитие малогабаритных ручных приборов шло по пути усовершенствования схемотехники усилителей, генераторов,
совершенствованием систем подмагничивания, разработки алгоритмов обработки сигналов, применением специальных сложноманипулированных зондирующих сигналов и алгоритмов их свертки [38,16,28]. Но до сих пор малогабаритные ручные ЭМА толщиномеры используют постоянные магниты и магнитные системы на их основе для создания поля подмагничивания.
1.3.Механизмы ЭМА преобразования
ЭМА преобразование включает три механизма преобразования электромагнитной энергии в механическую и обратно.
Лоренцевский
Основанный на силе Лоренца, обусловлен взаимодействием наведенных в поверхности ОК вихревых токов и постоянного магнитного поля при генерации механических колебаний и обратном эффекте - индукции в принимающей катушке под действием механической деформации проводящего материала в магнитном поле.
Магнитный
Обусловлен колебаниями поверхности в магнитном поле и проявляется только в материалах с высокой магнитной проницаемостью [7].
Магнитострикционный
Объединяет в себе магнитострикционный эффект при генерации и магнитоупругий эффект при приеме (эффект обратный магнитострикции) [7].
Первый механизм работает в проводящих материалах, а вторые два только в ферромагнетиках. Проводящими являются большинство металлов и их сплавов, используемых в промышленности, поэтому ручные малогабаритные универсальные ЭМА толщиномеры используют механизм на основе силы Лоренца.
14
Возбуждение продольных и поперечных волн с помощью механизма, основанного на силе Лоренца.
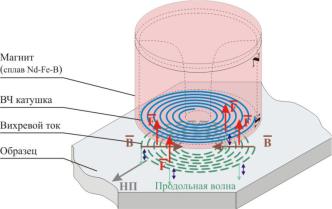
ЭМА способ возбуждения и приема позволяет использовать для толщинометрии продольную (как в обычном ПЭП) и сдвиговую горизонтально-поляризованную волну (SH). Принцип действия ЭМА преобразования на основе силы Лоренца (или электродинамического механизма) поясняется на рис.1. Индуктор ЭМАП, через который протекает импульс высокочастотного тока, создает в поверхностном слое металла вихревой ток. В результате совместного действия вихревого тока и поляризующего поля возникают силы Лоренца, обеспечивающие возбуждение в металле УЗ колебаний соответствующего типа. В зависимости от конструктивных параметров индуктора и ориентации поляризующего поля возбуждаются продольные волны или сдвиговые горизонтально поляризованные (в литературе чаще встречается название поперечная волна).
На рис. 1 магнитное поле распространяется вдоль поверхности ОК, а вихревые токи индуцируются на поверхности ОК. Поэтому направление колебаний УЗ волн и направление их распространения совпадают, продольная волна. На рис. 2 и 3 магнитное поле направлено по нормали к поверхности ОК, поэтому направление колебаний поперечно направлению распространения УЗ волн,
сдвиговая горизонтально поляризованая волна (shear wave of horizontal polarization или сокращенно SH волна). В зависимости от формы индуктора поляризация УЗ волн может быть радиальной рис. 2 или линейной рис. 3.
Рис 1 Возбуждение продольной волны
15

Рис2 Возбуждение SH волны с радиальной поляризацией.
Рис3 Возбуждение SH волны с линейной поляризацией.
Следует отметить, что возбуждение продольных волн в ферромагнетиках при использовании механизма, основанного на силе Лоренца, является неэффективным, поскольку в ферромагнетиках параллельно работает магнитных механизм, направление которого противоположно [45]. И
наоборот, неэффективно возбуждение продольных волн при помощи магнитного механизма.
Так же, следует отметить, что скорость распространения сдвиговых горизонтально-поляризованных волн почти в 2 раза ниже, чем продольных.
Это обеспечивает возможность измерения меньших толщин.
16
1.4.Конструкции ЭМА преобразователей.
Традиционно в НК виды преобразователей разделяют на два типа:
раздельно-совмещенные
совмещенные
Раздельно-совмещенные (РС) выполняются с разделенными индукторами,
отдельный индуктор для возбуждения, отдельный для приема. Основное достоинство РС ЭМА преобразователя: индуктор возбуждения легко может быть согласован с генератором, а приемный с входным усилительным каскадом. Конструктивно возбуждающий индуктор может быть выполнен над приемным или рядом с приемным. Достоинством последнего варианта является меньшая мертвая зона, т.к. индуктивная связь между индукторами меньше, а так же большая эффективность ЭМА преобразования, т.к. оба индуктора находятся максимально близко к поверхности ОК. Недостаток: на малых толщинах для сохранения высокой точности требуется учет траектории
[21,14]. Совмещенные ЭМА преобразователи используют один и тот же индуктор для возбуждения и для приема. Достоинства такого преобразователя: при генерации и при приеме все витки индуктора находятся максимально близко к поверхности ОК, одна и та же апертура является передатчиком и приемником, поэтому путь УЗ волн от ЭМА преобразователя и к преобразователю проходит по прямой траектории и не требует компенсации, как в случае РС преобразователя с разнесенными по поверхности передающим и приемным индукторами. Недостатки: основным недостатком совмещенного преобразователя является большая длительность мертвой зоны, которая обусловлена затухающими колебаниями, вызванными переходными процессами от зондирующего импульса, количество витков в индукторе выбирается компромиссным, поскольку для приемного индуктора лучше использовать большее количество витков для увеличения уровня сигнала, а для возбуждающего меньшее количество витков, но с большим током для увеличения эффективности возбуждения.
Для толщинометрических ЭМА преобразователей применяют следующие
виды индукторов: спиральный (рис.1 и 2) и «бабочка» (рис.4).
17
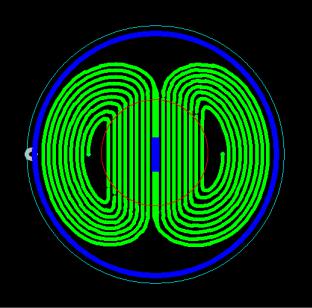
Рис4 Индуктор «бабочка, красной контуром обозначена область подмагничивающего
поля.
Спиральный индуктор может применяться для ЭМАП продольных волн и сдвиговых волн (радиальная поляризация сдвиговых УЗ волн). В случае использования сдвиговых волн, он имеет недостаток – ослабление амплитуды УЗ волн в дальней зоне, из-за сложения волн, которые имеют противоположную поляризацию. Причиной этому является осевая симметрия,
магнитное поле направлено по нормали к поверхности ОК, а вихревые токи повторяют рисунок катушки, поэтому любой точке ОК, где возбуждаются вихревые токи, найдется симметричная, относительно цента, точка с противоположным направлением вихревого тока. Соответственно,
направление поляризации акустической волны в этих точка будет противоположной. В дальней зоне суммарный сигнал от этих точек будет равен нулю. Для преодоления этого ограничения используют спиральный индуктор удлиненной формы рис.3 и индуктор «бабочка» рис.4. Для удлиненного индуктора магнитная система состоит из двух магнитов,
обеспечивающие магнитные потоки противоположного направления, через области поверхности твердого слоя с наведенными вихревыми токами тоже противоположного направления. Силы Лоренца при этом синфазны в обеих областях поверхности, поэтому сигнал в дальней зоне не будет ослабляться из-
18
за противоположной поляризации. Для индуктора бабочка используется такая же, как и на рис.2 подмагничивающая система. На рис.4 красным контуром обозначена область подмагничивающего поля. Как видно из рисунка, только часть витков, которая попадает внутрь красного контура, используется для ЭМА преобразования. Направление токов в этих частях витков одинаковое,
поэтому и поляризация УЗ волн будет одинаковой (линейной). Недостатком индукторов этого типа является то, что часть витков индуктора не используется для ЭМА преобразования, что приводит к лишним энергозатратам.
Индукторы могут быть выполнены объемными (намотанными объемным проводом) или печатными, у которых диэлектрик из стектотекстолита или полиимида. Печатные индукторы более технологичны в производстве по сравнению с объемными, но проигрывают им по габаритам, поскольку для печатных индукторов необходим дополнительный объем для диэлектрика
(стеклотекстолита или полиимида), на которым печатным способом выполняется индуктор. Печатные индукторы на основе полиимида наиболее перспективны, поскольку полиимид имеет большее пробивное напряжение и позволяет изготавливать их более тонкими, по сравнению с вариантом из стеклотекстолита. Чем тоньше диэлектрик, тем ближе к поверхности ОК витки, расположенные на всех слоях, кроме наиболее близкорасположенного к ОК, а это обеспечивает большую эффективность преобразования.
Полиимидные индукторы так же являются гибкими, что обеспечивает адаптацию к поверхности ОК, что так же увеличивает эффективность на криволинейных поверхностях ОК.
Поляризующее поле в ЭМА преобразователях создается при помощи постоянных магнитов, магнитных систем на основе постоянных магнитов,
импульсных магнитных систем, в которых магнитное поле создается при помощи импульса тока.
Для постоянных магнитов для ЭМАП в основном используются два типа материалов Nd-Fe-B (ниодим железо бор) и Sm-Co (самарий кобальт).
19
Остаточная намагниченность составляет 1,4 и 0,8 Тл соответственно. Точка Кюри составляет +180° С и +250° С, а для некоторых производных материалов с большей индукцией и ниже до +80°С. Это является ограничивающим фактором, поскольку использование ЭМАП при температурах близких к точке Кюри может вызвать выход из строя подмагничивающей системы. Поэтому необходимо или ограничивать температурный диапазон ЭМАП или обеспечивать воздушное (жидкостное) охлаждение. Последнее заметно усложняет конструкцию ручных приборов.
Для увеличения индукции применяют магнитные системы, в которых выполняется фокусирование магнитного поля в месте установки индуктора
[24, 1]. Недостатками являются большие габариты магнитной системы, что приводит к увеличению габаритов всего ЭМАПа. В этом случает сложно обеспечить локальность измерения, сложно установить ЭМАП на поверхность ОК, где ограничен доступ. Общим недостатком ЭМАПов на основе постоянных магнитов является эффект сильного притяжения к ферромагнитным материалам, что затрудняет процедуры установки и снятия,
сканирования, приводит к частому повреждения ЭМАПов и выходу их из строя.
Импульсное подмагничивание
Магнитные системы, использующие импульсные электромагниты создают магнитное поле на времена порядка нескольких миллисекунд, поэтому сильное притяжение к ферромагнитным материалам отсутствует. Значения индукции, создаваемых импульсными электромагнитами могут превышать в несколько раз значения, создаваемые магнитными системами на основе постоянных магнитов [8,44]. Недостатки: требуется дополнительная энергия для создания поля подмагничивания, усложняется техническая реализация,
поскольку необходимы быстродействующие сильноточные коммутаторы и мощные источники. Помимо этого, в ферромагнитных материалах при резком нарастании поля присутствуют скачкообразные помехи, обусловленные изменением геометрии магнитных доменов. В литературе этот эффект получил название шумов Баргаузена.
20