

1.2. Основні поняття
Механіка набула значного розвитку через те, що у повсякденному житті постійно спостерігаємо механічний рух.
Механіка вивчає механічний рух.
Механічний рух – зміна положення одних тіл відносно інших.
Механічною системою називають сукупність тіл, які виділені для спостереження.
Система відліку – це сукупність нерухомих одних відносно інших тіл, по відношенню до яких розглядають рух, і годинник (секундомір) для виміру часу.
З системою відліку пов’язують систему координат (наприклад, декартову).
Поступальний рух – це рух, при якому пряма, пов`язана з тілом не змінює своєї орієнтації відносно зовнішніх тіл (див. рис. 1.1). Інакше рух називається обертальним.

Рис. 1.1
Матеріальна точка – це тіло, розмірами якого можна знехтувати у даній задачі. Матеріальна точка здійснює лише поступальний рух, або покоїться.
Абсолютно тверде тіло – це тіло, відстані між будь-якими двома точками якого постійні. Іншими словами, розміри і форма абсолютно твердого тіла не змінюються при його русі. Часто абсолютно тверде тіло розглядають як систему матеріальних точок, які жорстко зв’язані між собою.
Приклад поступального і обертального руху.
Розглянемо маятник: на підвішеній до скелі нитці коливається сферична посудина з водою всередині (див. рис. 1.2). Вода з посудини не може витікати.
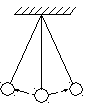
Рис. 1.2
Якщо температура ззовні досить висока – у середині кулі знаходиться вода, то кулю вважаємо матеріальною точкою. Дійсно, враховуючи слабку в’язкість води, ми відмічаємо, що вся маса води під час руху маятника не обертається (будь-яка пряма, пов’язана із водою залишається паралельною сама собі). А якщо вода внаслідок зниження температури перетвориться на лід, то рух посудини з льодом – обертальний рух твердого тіла.
Траєкторія – це лінія, вздовж якої рухається тіло. На рис. 1.3 показано приклад траєкторії тіла АСВ.
Шлях – довжина траєкторії (довжина кривої АСВ).
Переміщення
– вектор, який з`єднує початок і кінець
траєкторії (на рис. 1.3 –
![]() ).
).
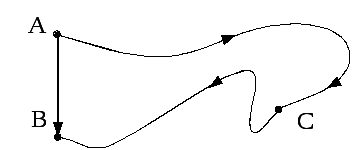
Рис. 1.3
Механіка поділяється на три розділи (див. рис. 1.4):
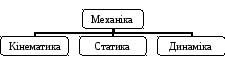
Рис. 1.4
Кінематика займається описом руху тіл, не аналізуючи причини руху (сили). Статика вивчає умови рівноваги тіл. Динаміка вивчає сили.
1.3. Радіус-вектор
Рух
будь-якого тіла вивчають за допомогою
системи відліку, яка складається з тіла
відліку, системи координат і годинника.
На рис 1.5 показано декартову систему
координат xyz.
Положення матеріальної точки у просторі
задають за допомогою радіус-вектора –
вектора, який проведено до точки з
початку координат (на рис 1.5 –
![]() ).
).
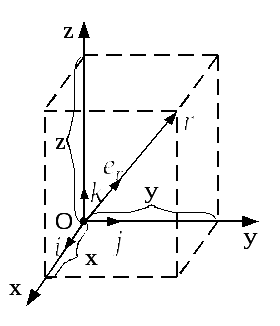
Рис. 1.5
Радіус-вектор
![]() спроектуємо на координатні осі. Довжини
проекцій на рис. 1.5 позначені фігурними
дужками і дорівнюютьx,
y,
z.
Вздовж координатних осей з початку
системи координат розпочинаються
вектори одиничної довжини
спроектуємо на координатні осі. Довжини
проекцій на рис. 1.5 позначені фігурними
дужками і дорівнюютьx,
y,
z.
Вздовж координатних осей з початку
системи координат розпочинаються
вектори одиничної довжини
![]() – орти координатних осей.
– орти координатних осей.![]() можна представити через орти та його
проекції так:
можна представити через орти та його
проекції так:
![]() . (1.1)
. (1.1)
Модуль радіус-вектора – абсолютна величина
![]() .
.
Радіус-вектор
![]() можна представити у вигляді добутку
його модуля на орт
можна представити у вигляді добутку
його модуля на орт![]() ,
який задає напрямок радіус-вектора
(див. рис. 1.5):
,
який задає напрямок радіус-вектора
(див. рис. 1.5):
![]() .
.
Рух матеріальної точки повністю заданий, якщо вказано однозначний закон зміни із часом її просторових координат
x= x(t), y= y (t), z= z(t).
Ці рівняння еквівалентні одному векторному рівнянню:
![]() .
.