

Применение электронных устройств в системах автоматизации4
.8.pdfВ исходном сигнале период выборки определяется исходной частотой дискретизации , которая в соответствии с теоремой Котельникова-
Шеннона должна минимум в 2 раза превышать высшую частоту обрабатываемого сигнала.
При таком соотношении спектр шумов дискретизации будет располагаться очень близко к спектру полезного сигнала, что не позволит, даже при наличии фильтра очень высокого порядка расширить динамический диапазон преобразования. При передискретизации между отсчетами исходного сигнала вставляются нулевые отсчеты с частотой в целочисленное число раз, (как правило, в 2 раз) превышающей частоту . Далее интерполирующий фильтр рассчитывает тригонометрические полиномы, проходящие через точки, соответствующие входным выборкам (рисунок 6.6).
Рисунок 6.7 – Структура сигма-дельта ЦАП
Блок-схема сигма-дельта ЦАП представлена на рисунке 6.7. После интерполирующего фильтра сигнал приходит на вход сигма-дельта модулятора. Сигма-дельта модулятор представляет собой устройство,
которое преобразует последовательность многоразрядных слов на входе в малоразрядные двоичные коды, управляющие ключами параллельного ЦАП низкой разрядности. На рисунке 6.7 показан модулятор первого порядка, но
применяют также схемы с модуляторами более высоких порядков, в которых
71
аппроксимация выполняется более плавными кривыми. Одновременно с преобразованием многоразрядных выборок в малоразрядные модулятор переносит спектр шума квантования в область более высоких частот, где он может быть эффективно подавлен аналоговым фильтром относительно низкого порядка с высокой частотой сопряжения. Например, имеем цифровой сигнал 10 бит при =20 КГц, тогда шум составит:
Сигнал⁄шум = 6.02 +1,76 дБ = 62дБ. |
(6.4) |
После передискретизации с К=128, К |
=2,56МГц, (модулятор первого |
|
порядка) на выходе сигма-дельта ЦАП: |
|
|
Сигнал⁄шум = 6.02 |
+10logК = 81дБ , |
(6.5) |
а это уже соответствует 13 разрядам преобразования. Фильтр первого порядка с частотой сопряжения 20КГц подавит частоту 2,56Мгц на 42дБ.
Из формулы (6.5) следует, что каждое четырехкратное увеличение частоты дискретизации эквивалентно увеличению числа разрядов ЦАП на один бит. Специально для промышленныхприменений Analog Devise
разработан сигмадельта ЦАП DAC1220, который имеет эффективное число разрядов-20, обладая при этом 20битной монотонностью и имеющий самокалибровку. А также ЦАП PCM1608 8-канальный, с разрядностью 1624бит, динамическим диапазоном 100дБ и содержащий цифровые аттенюаторы.
72
Вопросы для самопроверки.
1)Какую задачу выполняет цифроаналоговый преобразователь.
2)По какому принципу цифровое представление сигнала преобразуется в аналоговое.
3)Что такое квантование сигнала по уровню и его дискретизация.
4)Каково соотношение соседних весовых токов в параллельной матрице ЦАП для двоичного представления сигнала.
5)Какие недостатки присущи параллельной матрице.
6)Как рассчитываются сопротивления резисторов матрицы R-2R.
7)Почему в ЦАП большой разрядности применяют матрицу R-2R.
8)Почему с матрицей R-2R необходимо использовать двунаправленные ключи.
9)Объясните значение параметров ЦАП – разрешение, погрешность полной шкалы, динамический диапазон.
10)Как подгоняются весовые токи в ЦАП с источниками тока и диодными ключами.
11)Как влияет время установления на быстродействие ЦАП.
12)Как в ЦАП связаны между собой максимальное выходное напряжение, разрядность, напряжение ИОН и напряжение МЗР.
13)В чем заключается процесс передискретизации цифрового сигнала.
14)Как работает сигма-дельта модулятор.
15)Как частота передискретизации влияет на эквивалентное число разрядов сигма-дельта ЦАП.
73
7.АЦП
Аналогово-цифровой преобразователь в системах автоматического управления служит для преобразования сигналов с датчиков в цифровой код,
который затем передается в микропроцессорный или микроконтроллерный регулятор. Кроме того, АЦП могут использоваться в информационных подсистемах АСУ ТП для передачи сигналов датчиков, контролирующих протекание технологического процесса, на верхний уровень. При этом АЦП располагаются в непосредственной близости от объекта, а информация передается с помощью цифровых интерфейсов (диспетчеру или управляющему компьютеру). Цифровой канал передачи данных значительно менее чем аналоговый подвержен воздействию мощных промышленных помех а, также допускает уплотнение каналов за счет мультиплексирования,
что упрощает эксплуатацию систем. От точности и быстродействия АЦП будет зависеть качество регулирования и следовательно стабильность технологического процесса. АЦП могут быть построены на разных принципах. Различают несколько групп аналогово-цифровых преобразователей. Самыми быстродействующими являются параллельные преобразователи, но они так же самые дорогостоящие, среднее положение на шкале быстродействия занимают АЦП последовательных приближений и,
наконец, самые медленные, но самые точные интегрирующие преобразователи. В последнее время все более часто используют сигма-
дельта преобразователи, обладающие некоторыми преимуществами по отношению к интегрирующим преобразователям.
7.1Принципы аналого-цифрового преобразования. Параметры
АЦП.
Принцип АЦ-преобразования основан на замене непрерывного аналогового сигнала ступенчатым, причем величина ступенек в пределах шкалы АЦП остается неизменной. По оси времени сигнал разбивается на
74

отрезки, заданные частотой выборок, а по оси напряжений на отрезки,
равные напряжению, соответствующему младшему значащему разряду выходного кода.
При линейном нарастании входного напряжения от 0 до полного значения шкалы АЦП выходной сигнал образует цифровую ступенчатую характеристику, которую называют характеристикой преобразования. Если аппаратных погрешностей преобразования нет, то середины ступенек находятся на идеальной прямой. Реальная характеристика преобразования существенно отличается от идеальной размерами и формой ступенек,
расположением на плоскости координат и так далее (рисунок 7.1).
Погрешности преобразования отображаются в характеристиках АЦП через их параметры. [17]
Рисунок 7.1 - Характеристики преобразования
К статическим параметрам относят:
75
-разрешение АЦП - это величина обратная максимальному числу кодовых комбинаций (например, идеальный 10 разрядный АЦП имеет разрешающую способность 1/1024 или 0,097% или 60дБ);
-погрешность полной шкалы - это разность между реальным и идеальным значением предела шкалы преобразования (при отсутствии смещения),
измеряется в процентах или числом МЗР;
-погрешность смещения нуля - это значение входного напряжения при выходном коде равном нулю;
-нелинейность - это максимальное отклонение реальной характеристики преобразования от идеальной, выраженной в процентах или МЗР;
-дифференциальная нелинейность характеристики - это разность между текущим значением ступеньки напряжения и ее средним значением.
Нелинейности неустранимы простыми средствами и поэтому являются важнейшими метрологическими характеристиками.
-температурная нестабильность.
К динамическим параметрам относят:
-максимальную частоту преобразования - это наибольшая частота образования кодов сигнала (измеряется частотой выборок в секунду SPS)
при условии непревышения допустимого значения, например, нелинейности или монотонности преобразования;
-время преобразования - это время от начала импульса дискретизации или начала преобразования до появления на выходе устойчивого кода соответствующего данной выборке;
-время выборки - это время, в течение которого происходит образование выборочного значения кода (при работе без УВХ равно времени преобразования).
76
При оценке работы АЦП с сигналом переменного тока очень важной характеристикой является динамический диапазон – это выраженное в децибелах соотношение среднеквадратичного значения амплитуд входного сигнала и максимальной паразитной составляющей этого сигнала,
обусловленной свойствами АЦП. Расширение динамического диапазона происходит с ростом разрядности АЦП и повышением частоты выборок.
Далее рассмотрим устройство, работу и особенности наиболее часто применяемых типов АЦП.
7.2. АЦП параллельного типа.
Параллельный АЦП (рисунок 7.2) использует многоступенчатый источник образцового напряжения, выполненный на резисторах одинакового номинала. Количество образованных с помощью делителя источников образцового напряжения составляет 2 . Резисторы R/2 на концах цепочки обеспечивают смещение напряжения в узлах делителя равное половине младшего значащего разряда (МЗР). Таким образом получаются напряжения:
МЗР 2, |
3 МЗР 2, 5 МЗР 2, 7 МЗР 2 и так далее до 2 МЗР − 3 МЗР 2. |
Напряжения с узлов делителя подаются на инвертирующие входы компараторов. На неинвертирующие входы компараторов подается входное напряжение.
Выходы компараторов устанавливают единицы на D-входах триггеров,
если входное напряжение превышает напряжение на их неинвертирующем входе, или нули, если соотношение напряжений обратное. При прохождении импульса выборки (синхронизации) состояние компараторов записывается в триггеры и появляется на их выходах. Преобразование позиционного кода записанного в триггерах в двоичный код выполняется приоритетным шифратором. В таблице 7.1 показаны состояния параллельного АЦП для различных уровней входного напряжения.
77
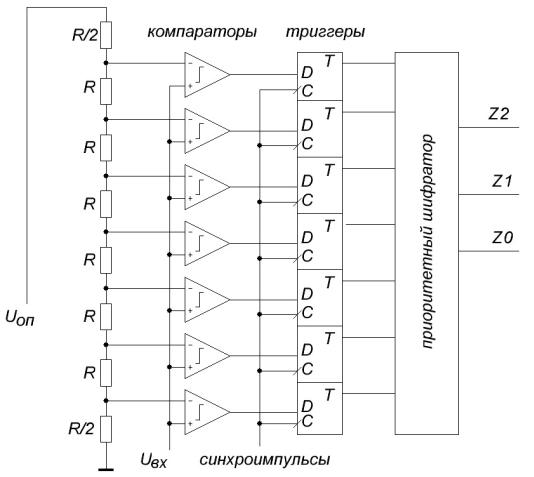
Рисунок 7.2 - Схема 3-х разрядного АЦП параллельного типа
Таблица 7.1-Иллюстрация работы параллельного АЦП
Входное напряжение |
Состояние компараторов |
Состояние выходов |
|
вх |
МЗР |
К7К6К5К4К3К2К1 |
Z2 Z1 Z0 |
|
|
||
|
0 |
0000000 |
000 |
|
|
|
|
|
1 |
0000001 |
001 |
|
|
|
|
|
2 |
0000011 |
010 |
|
|
|
|
|
3 |
0000111 |
011 |
|
|
|
|
|
4 |
0001111 |
100 |
|
|
|
|
|
5 |
0011111 |
101 |
|
|
|
|
|
6 |
0111111 |
110 |
|
|
|
|
|
7 |
1111111 |
111 |
|
|
|
|
|
|
78 |
|
Из таблицы видно, что компараторы переходят в состояние единицы, по очереди начиная с младшего и, если быстродействие их будет неодинаковым,
то возможны пропуски единиц и появление неправильных состояний.
Приоритетный шифратор не учитывает младших единиц в позиционном коде, что позволяет снизить вероятность ошибки преобразования.
Таким образом, параллельный АЦП выполняет преобразование за один шаг,
чем и объясняется его высокое быстродействие. Однако, такая схема требует очень больших аппаратных затрат, впрочем легко реализуемых в микросхемотехнике. Параметры параллельных АЦП смотрите в таблице 7.2.
Параллельные АЦ-преобразователи применяются в машиностроении при автоматизации сборочных операций для распознавания образов.
7.3. АЦП поразрядного уравновешивания.
АЦП поразрядного уравновешивания (последовательных приближений)
является наиболее распространенным из последовательных преобразователей, применяемых в системах автоматизации. Работа этого преобразователя основана на принципе дихотомии, т. е. сравнении входного напряжения с 1/2, 1/4, 1/8 и так далее от ее возможного максимального значения. Весь процесс преобразования выполняется за N +1
последовательных шагов. На рисунке 7.3 проиллюстрирован ход преобразования. После подачи команды «пуск» с приходом первого тактового импульса регистр последовательных приближений (РПП) подаёт на вход ЦАП код, равный половине диапазона преобразуемого сигнала. Если входное напряжение больше чем эта величина, то на выходе компаратора К устанавливается единица, которая записывается в РПП, если меньше, то устройство управления (УУ) переключит старший разряд обратно в состояние 0. Вслед за этим таким же образом производится сравнение
79
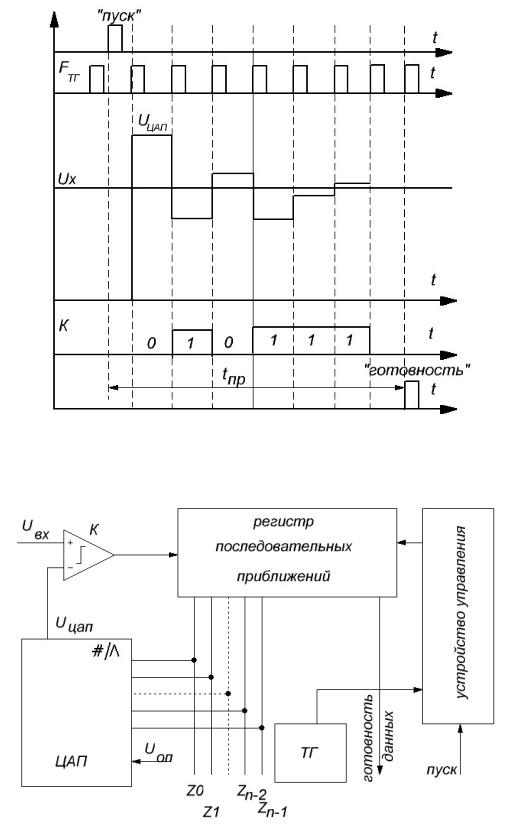
остатка с ближайшим младшим разрядом. Вышеприведенный алгоритм реализуется схемой, показанной на рисунке 7.4.
Рисунок 7.3 - Процесс поразрядного уравновешивания для 6-ти разрядов.
Рисунок 7.4 - Структурная схема АЦП поразрядного уравновешивания.
80