

Применение электронных устройств в системах автоматизации4
.8.pdfИзмерительными элементами моста может быть один резистор
(четвертьмостовая схема, часто используемая при измерении температуры резистивным датчиком), два (полумостовая схема, используемая в динамометрах и датчиках давления) или все четыре (полномостовая схема динамометра). Нужно учитывать, что четьвертьмостовая схема обладает достаточно большой нелинейностью (0.5%), которая, впрочем, легко учитывается при микропроцессорной обработке сигнала, так как она выражается аналитически и относится именно к схемной конфигурации.
а) четверть-мостовое включение |
б)полумост |
в) полумост |
г) полный мост |
Рисунок 3.6 - Схемы включения резистивных датчиков (при питании моста
от источника стабильного тока).
Полномостовая схема не вносит нелинейности, но при этом не нужно забывать о том, что сам датчик может обладать нелинейной характеристикой.
Чувствительность мостовых схем весьма невелика, поэтому для нормирования сигнала необходимо использовать инструментальные
31
усилители с большим коэффициентом усиления и малыми собственными шумами. Основные параметры мостовых схем приведены на рисунах3.5 и 3.6[12]. Для схем (рисунок 3.5) выходное напряжение моста и его нелинейность составляют:
-б) |
вых = ( |
пит⁄4)∆ |
⁄( +∆ ⁄2), |
нелинейность 0,5%; |
(3.3) |
|
-а) |
вых = ( |
пит⁄2)∆ |
⁄( +∆ ⁄2), |
нелинейность 0,5%; |
(3.2) |
|
|
|
|
||||
-в) |
вых = |
пит∆ ⁄ , |
нелинейность 0%; |
(3.4) |
||
-г) |
⁄нелинейность, |
0%; |
(3.5) |
|||
вых = ( |
пит⁄2)∆ |
|||||
при условии,что R1=R2=R3=R4.
При питании стабильным |
током |
выходное напряжение моста |
и его |
||
нелинейность составят: |
⁄( +∆ |
⁄4), нелинейность0,25%; |
|
||
-а) |
вых = ( вх ⁄4)∆ |
(3.6) |
|||
-б) |
вых = вх∆ ⁄2, нелинейность 0%; |
|
(3.7) |
||
-в) |
вых = вх∆ ⁄2, нелинейность 0%; |
|
(3.8) |
||
-г) |
вых = вх∆ , нелинейность 0%; |
|
(3.9) |
||
при условии, что R1=R2=R3=R4 ( |
|
- изменение |
|
||
сопротивления датчика под действием |
измеряемого фактора). |
|
|||
здесь и далее ∆ |
|
|
|||
На рисунке 3.7 - приведена четверть-мостовая схема включения резистивного датчика температуры, отличающаяся высокой точностью коэффициента преобразования и отсутствием разбалансировки моста ввиду высокого
32
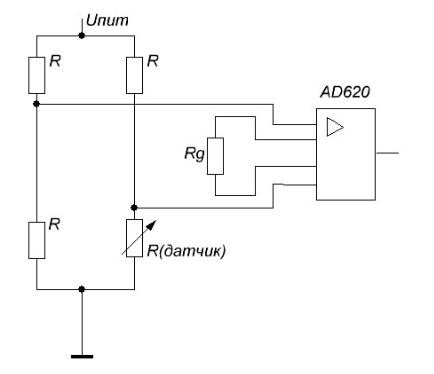
входного сопротивления измерительного усилителя и высокого
Рисунок 3.7 - Подключение термодатчика с помощью четвертьмостовой схемы к измерительному усилителю
значения его КОСС. Выход нелинеен, но может быть просто линеаризован на цифровом уровне. В качестве инструментальных усилителей можно использовать AD620, AD623 или AD627 и другие. В данной схеме требуется стабилизированный источник напряжения для питания мостовой схемы, а
выходное напряжение равно:
|
вых = ( пит⁄4)∆ ⁄( +∆ ⁄2)[ |
], |
(3.10) |
где |
- коэффициент усиления инструментального усилителя (задается |
||
с помощью[ |
]Rg или программно). |
|
|
При использовании четвертьмостового включения датчика температуры резистивного типа возможна линеаризация моста по приведенной на рисунке
3.8 схеме.
33
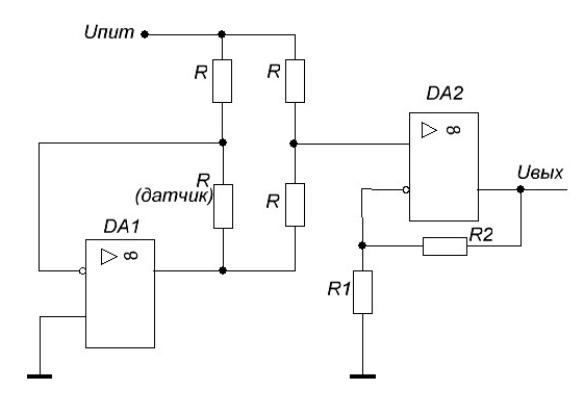
Рисунок 3.8 - Линеаризация четвертьмостового включения датчика температуры резистивного типа
В этой схеме операционный усилитель DA1 поддерживает напряжение на левом выходе моста равным потенциалу общего провода путем изменения напряжения питания моста и вследствие этого изменение напряжения на правом выходе моста будет пропорционально изменению сопротивления датчика. ОУ DA2 усиливает сигнал до требуемого значения и в итоге:
вых = пит∆ ⁄4 (1+ 2⁄ 1), |
(3.11) |
где ∆ - изменение сопротивления датчика пропорциональное температуре.
Питание операционных усилителей в этой схеме должно быть двухполярным.
Еще одна схема включения полного моста с питанием стабильным током приведена на рисунке 3.9. В приведенной схеме на ОУ DA1собран источник
стабильного |
тока (I=Uоп/Ri), благодаря которому сопротивление |
|
34 |

соединительных проводов (Rпр.) цепи питания моста, а, следовательно, и их длина не влияет на выходное напряжение моста.
Рисунок 3.9 - Питание полномостовой схемы стабильным током
Сопротивление сигнальных проводов не может влиять на выходное напряжение схемы, так как оно на порядки меньше входного сопротивления инструментального усилителя к которому подключается схема. Таким образом, длина соединительных проводов может быть достаточно большой.
Относительный метод минимизации ошибок, связанных с сопротивлением соединительных проводов показан на рисунке 3.10. Мост в этой схеме питается от однополярного источника питания. Измеряющий аналогово-цифровой преобразователь (АЦП) AD7730 использует напряжение
питания моста в качестве источника опорного напряжения, поэтому
изменение этого напряжения не приводит к изменению выходного кода АЦП.
AD7730 - это |
24-разрядный сигма-дельта АЦП |
с программируемым |
|
усилением, фильтром низких частот и самокалибровкой. |
AD7730 |
||
обеспечивает |
дрейф напряжения смещения 5 |
нВ/°С. |
Благодаря |
|
35 |
|
|
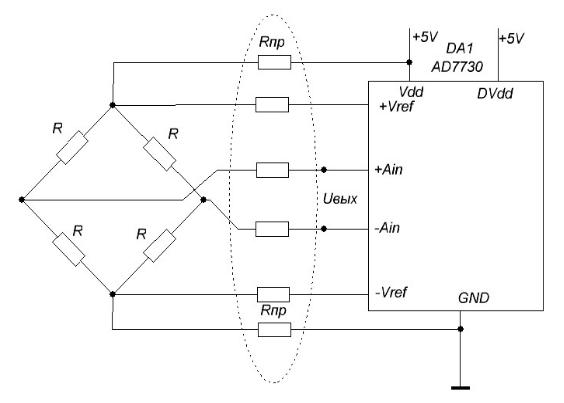
вышеприведенному решению, получается схема, имеющая очень высокую точность преобразования сигнала.
Рисунок 3.10 - Минимизация погрешности, связанной с
сопротивлением соединительных проводов Современная микросхемотехника позволяет создавать законченные
устройства с уникальными свойствами в виде отдельных микросхем,
применение которых снимает многие вопросы разработки. Примером тому может служить микросхема PGA309 (Texas Instruments) (рисунок 3.11).
Программируемый нормализатор сигнала PGA309 обеспечивает
высококачественную поддержку мостовых датчиков. В том числе, их питание, термокомпенсацию, цифровую энергонезависимую калибровку,
линеаризацию |
и |
ручную |
коррекцию. |
Коэффициент |
усиления |
программируется. |
|
Настройки |
нормализатора |
PGA309 |
хранятся в |
энергонезависимой EEPROM с интерфейсом |
C (он же используется и для |
||||
настройки параметров PGA309). |
|
|
|
||
36
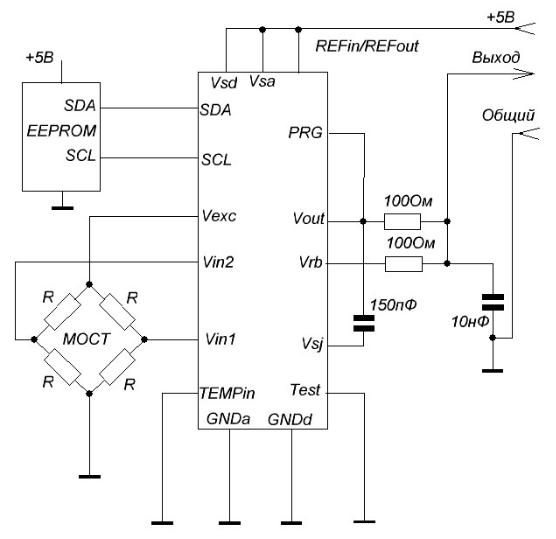
Рисунок 3.11 - Схема включения PGA309, рекомендуемая производителем.
Микросхема позиционируется производителем как устройство для промышленных применений, например, для датчиков давления. Тракт сигнала моста микросхемы аналоговый, благодаря чему она работоспособна до частоты порядка 100КГц. Выход можно настроить так, чтобы при изменении параметра в полном диапазоне выходной ток изменялся от 4 до20
мА, что обеспечивает согласование с промышленными контроллерами.
Точность преобразования микросхемы составляет порядка 0,2%. К входу
TEMPin можно подключать внешний датчик температуры. Микросхема выполнена в 16-выводном корпусе для поверхностного монтажа.
37
Вопросы для самоконтроля.
1)Что представляет собой термопара, каковы ее основные характеристики, основные типы термопар.
2)Какие основные требования предъявляются к усилителю сигнала термопары.
3)Возможно ли для усиления сигнала термопары применять инструментальный усилитель.
4)Какими факторами обусловлены погрешности преобразования сигнала термопары.
5)Какие способы существуют для компенсации термоЭДС «холодного спая термопары».
6)Какие материалы используются в термометрах сопротивления. Какими параметрами характеризуются терморезисторы.
7)Какие схемы включения резистивных датчиков применяются наиболее часто и, в силу каких причин.
8)Как компенсируют нелинейность резистивных датчиков.
9)В каких первичных преобразователях используют резистивные датчики.
10)Как компенсировать влияние температуры на результат измерения при использовании резистивных датчиков.
11)Каким образом учитывается сопротивление соединительных проводов при удаленном подключении резистивных датчиков.
38
4. Подключение датчиков, обладающих особыми свойствами.
Для измерения интенсивности магнитного поля применяют датчики Холла, которые имеют невысокую чувствительность и требуют питания
стабильным током. На рисунке 4.1 показана схема подключения датчика Холла. В этой схеме датчик питается током, стабилизированным с помощью
источника стабильного тока выполненного |
на ОУ DA1 и полевом |
транзисторе VT1. При этом ток равен: I=5В/240Ом. Начальное смещение |
|
напряжения неинвертирующего входа DA3 задается схемой на ОУ DA2 и |
|
транзисторе VT2 равным потенциалу общего провода, а выходной сигнал |
|
датчика усиливается дифференциальным |
усилителем DA3 в 50 раз |
(100Ком/2КОм). Благодаря применению в схеме прецизионных резисторов
данная схема может применяться для магнитометрических измерений. В
схеме можно применять операционные усилители типа OP7 и им подобные.
При автоматизации некоторых процессов требуется измерение
вибрации и акустических сигналов. Датчики вибрации и акустических сигналов часто выполняются на основе пьезоэлементов. С помощью
пьезодатчиков можно измерять силу, давление, ускорение. Пьезоэлементы
обладают очень высоким выходным сопротивлением на низких частотах и с
целью расширения диапазона в сторону понижения частоты их нужно |
|
подключать, по сути, к усилителю заряда. Схема усилителя для |
|
пьезодатчиков, работоспособная вплоть до частоты |
в 0,16Гц приведена |
на рисунке 4.2. При реализации этой схемы необходимониж. |
использовать ОУ с |
полевыми транзисторами на входе, а также ограничить длину кабеля (если это возможно, то усилитель лучше расположить в непосредственной
близости от датчика). |
Коэффициент усиления схемы составляет: |
|
|||||
При номиналах, |
|
= ∆ вых⁄∆ |
вх = (1+ |
Ф |
3⁄ 2)/ 1 |
. |
(4.1) |
|
|
|
|
|
|||
|
указанных на схеме Kq= |
, нижняя частота диапазона |
|||||
по уровню -3дБ Fниж=1/R3C1. |
10 |
|
|
|
|||
39
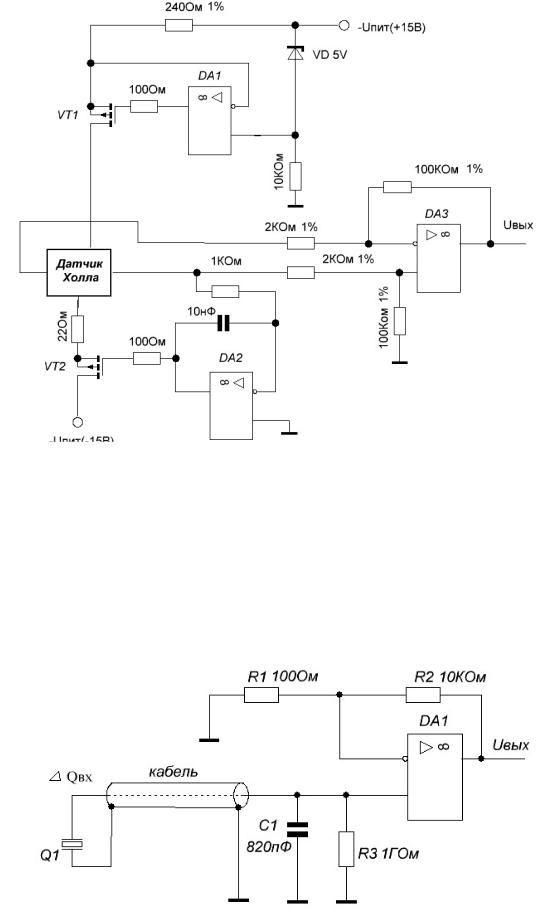
Рисунок 4.1 - Схема подключения датчика холла для магнитометрических измерений
При использовании емкостных датчиков перемещения также требуется усилитель заряда. В качестве такого усилителя можно применить схему,
показанную на рис 4.3. Здесь применен ОУ с полевыми транзисторами на входе.
Рисунок 4.2 - Схема усиления сигнала пьезодатчика на низких частотах
40