

Министерство образования республики беларусь
Учреждение образования
«Витебский государственный технологический университет»
Технические средства автоматизации
Методическое пособие по исполнительным механизмам.
Витебск
2011
ОГЛАВЛЕНИЕ
ВВЕДЕНИЕ . . . . . . . . . . 2
ОБЩИЕ СВЕДЕНИЯ ОБ ИСПОЛНИТЕЛЬНЫХ МЕХАНИЗМАХ . 3
1.1. Основные понятия и определения . . . . . . 3
Общие требования, предъявляемые к исполнительным механизмам 4
Классификация исполнительных механизмов . . . . 5
ЭЛЕКТРИЧЕСКИЕ ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ . . 6
2.1. Электрические исполнительные двигатели . . . . 6
2.2. Исполнительные двигатели переменного тока . . . . 8
2.3. Асинхронные тахогенераторы . . . . . . 12
2.4. Исполнительные двигатели постоянного тока . . . . 14
Передаточная функция двигателя постоянного тока независимого
возбуждения . . . . . . . . . 20
2.6. Тахогенераторы постоянного тока . . . . . . 22
2.7. Шаговые исполнительные двигатели . . . . . 24
2.8. Выбор типа исполнительного двигателя и редуктора . . 26
2.9. Электромагнитные исполнительные элементы . . . 30
2.10. Особенности расчётов электромагнитов переменного тока . 31
2.11. Расчёт обмоток электромагнита постоянного тока . . . 32
2.12. Электромагнитные муфты . . . . . . . 34
ПРОМЫШЛЕННЫЕ ЭЛЕКТРИЧЕСКИЕ ИСПОЛНИТЕЛЬНЫЕ
МЕХАНИЗМЫ . . . . . . . . . . 40
3.1. Исполнительные механизмы позиционного регулирования . 40
3.2. Исполнительные механизмы пропорционального регулирования 42
3.3. Исполнительные механизмы переменной скорости . . . 46
ЭЛЕКТРОМАГНИТНЫЕ ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ . 51
ПНЕВМАТИЧЕСКИЕ И ГИДРАВЛИЧЕСКИЕ
ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ . . . . . . 53
Общая характеристика пневматических и гидравлических
волнительных механизмов . . . . . . . 53
5.2. Гидравлические и пневматические двигатели . . . . 54
5.3. Исполнительные механизмы и двигатели поступательного и
вращательного движения . . . . . . . 56
СРАВНИТЕЛЬНАЯ ОЦЕНКА РАЗЛИЧНЫХ
ИСПОЛНИТЕЛЬНЫХ ЕХАНИЗМОВ . . . . . . 62
ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ В
АВТОМАТИЗИРОВАННЫХ ВВОДАХ ШВЕЙНЫХ МАШИН . . 65
ЛИТЕРАТУРА . . . . . . . . . 69
ВВЕДЕНИЕ
Исполнительный механизм является одним из основных элементов в системах автоматизации производственных процессов.
В настоящее время в отечественной и зарубежной практике появилось много разнообразных исполнительных механизмов, основанных на различных принципах действия. Однако материал по исполнительным механизмам в отечественной литературе недостаточно систематизирован, что создаёт определённые трудности при выборе оптимальных типов исполнительных механизмов для конкретных систем автоматического управления различными производственными процессами.
Необходимость публикации методических указаний вызвана отсутствием учебника по курсу "Технические средства автоматизации", что затрудняет работу студентов при изучении предмета.
В данном указании рассмотрены исполнительные механизмы, основанные на различных принципах действия (электрические, пневматические, гидравлические), приведены их схемы, описаны конструкции, приводятся материалы по расчёту, а также справочные материалы по исполнительным механизмам, серийно выпускаемым отечественной промышленностью.
В целом материал методических указаний может быть использован для изучения курсов "Электрические машины", "Автоматизированный электропривод" и при курсовом и дипломном проектировании.
ОБЩИЕ СВЕДЕНИЯ ОБ ИСПОЛНИТЕЛЬНЫХ МЕХАНИЗМАХ
Основные понятия и определения
Под термином "исполнительный механизм" в системе автоматического регулирования и дистанционного управления понимается автоматическое устройство, осуществляющее перемещение конечного звена системы автоматики (регулирующего органа) в соответствии с сигналами, поступающими от чувствительного или управляющего элемента.
В общем случае исполнительные механизмы состоят из совокупности следующих элементов:
- исполнительного двигателя, служащего источником силового воздействия на регулирующий орган;
- передаточного или преобразовательного устройства (различного рода редукторы, муфты, храповики и т.д.), располагающегося между исполнительным двигателем и регулирующим органом системы и служащего для получения определённой скорости, направления и характера его движения;
- узла конечных выключателей, осуществляющего автоматический останов или переключение исполнительного механизма в конечных или промежуточных положениях;
- системы управления, включающей аппаратуру пуска, реверсирования, останова, регулирования скорости, защиты и сигнализации.
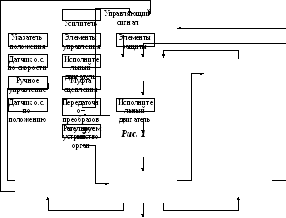 В
ряде случаев в функциональную схему
исполнительного механизма может входить
усилительный элемент, служащий для
преобразования сигнала, передаваемого
к исполнительному двигателю, и получения,
в следствии этого, больших перестановочных
усилий в нём; устройства обратной связи
по положению и скорости выходного звена
исполнительного механизма; указатель
положения и др. Общая функциональная
схема исполнительного механизма
представлена на рис. 1.
В
ряде случаев в функциональную схему
исполнительного механизма может входить
усилительный элемент, служащий для
преобразования сигнала, передаваемого
к исполнительному двигателю, и получения,
в следствии этого, больших перестановочных
усилий в нём; устройства обратной связи
по положению и скорости выходного звена
исполнительного механизма; указатель
положения и др. Общая функциональная
схема исполнительного механизма
представлена на рис. 1.
Часто электрические, пневматические и гидравлические исполнительные механизмы называют приводами. Для гидравлических механизмов, использующих в качестве энергоносителя масло, иногда в литературе употребляются термины "сервомеханизм", "сервопривод", "сервомотор". Сервомеханизмом, или сервомотором называется совокупность устройств, использующих для усиления энергию от постороннего источника и воспроизводящих с возможно меньшей ошибкой на выходе маломощные управляющие сигналы, поданные на его вход.
Общие требования, предъявляемые к исполнительным механизмам
Исполнительный механизм, работающий в системе автоматического регулирования, должен не только совершать работу по перемещению регулирующего органа, но и обеспечивать это перемещение с возможно меньшими искажениями законов регулирования, формируемых регулирующим устройством. Поэтому одним из основных требований, предъявляемых ко многим исполнительным механизмам, является обеспечение быстродействия и необходимой точности. К исполнительным механизмам предъявляется также ряд требований конструктивного, эксплуатационного и экономического характера. Они выражаются в следующем:
- исполнительный механизм должен иметь минимальные габариты и вес, быть конструктивно простым, обладать высокой надёжностью, а также обеспечивать плавность и равномерность движения приводного механизма;
- исполнительный механизм должен быть безопасен в эксплуатации, устойчив в работе, обеспечивать постоянство скорости перемещения регулирующего органа, а также возможность регулирования скорости и крутящего момента;
- исполнительный механизм должен иметь устройство защиты для предохранения регулирующего органа от перегрузок и поломок, а также систему ручного управления на случай возможных отказов в схеме управления приводом при нарушении энергоснабжения.
Основными показателями исполнительных механизмов являются:
- номинальные значения вращающего момента на выходном валу исполнительного механизма или усилия на его выходном штоке;
- максимальное значение вращающего значения на выходном валу исполнительного механизма или усилия на выходном штоке. Эти значения определяют наибольшие нагрузки, которые данный исполнительный механизм вообще может преодолеть;
- к. п. д. - отношение максимально полезной мощности на выходе исполнительного механизма к мощности, отбираемой от источника энергии;
- постоянная времени - параметр, характеризующий инерционность исполнительного механизма. Этот показатель определяет величину быстродействия исполнительного механизма в системе автоматического регулирования;
- время оборота выходного вала исполнительного механизма или хода его штока.
Помимо вышеперечисленных показателей, для всех исполнительных механизмов одними из важнейших показателей являются их различные динамические и статические характеристики. Знание этих показателей позволяет осуществить правильный выбор исполнительного механизма для конкретных систем регулирования и управления.
Классификация исполнительных механизмов
В настоящее время разработано и применяется большое количество разнообразных исполнительных механизмов, основанных на различных принципах действия и выполняющих различные функции в зависимости от характера технологического процесса и получения заданного закона изменения положения регулирующего органа.
Поэтому возникает необходимость классификации исполнительных механизмов как по виду потребляемой энергии, по их устройству, конструкции и принципу действия, так и по назначению и характеру их использования в автоматических системах.
По виду потребляемой энергии все исполнительные механизмы можно разделить на следующие группы:
- электрические, использующие для своего действия электрическую энергию;
- пневматические, использующие энергию сжатого воздуха или газа;
- гидравлические, использующие энергию жидкости.
Каждый из перечисленных типов исполнительных механизмов, в свою очередь, можно классифицировать по типу, конструкции и принципу действия исполнительного двигателя.
По характеру и назначению работы в автоматических системах исполнительные механизмы разделяются:
- работающие по дискретному принципу "открыто" - закрыто";
- работающие по закону непрерывной функции. К ним относятся исполнительные механизмы позиционного и пропорционального действия;
- исполнительные механизмы следящего и программного действия.
По скорости вращения или движения:
- тихоходные и быстроходные.
Однако классификация по этому признаку является чисто условной, так как для разных процессов одни и те же исполнительные механизмы при одной и той же скорости их выходных звеньев могут быть и быстроходными, и тихоходными.
По времени работы исполнительные механизмы могут быть разбиты на три основные группы:
- с продолжительным режимом работы;
- с кратковременным режимом работы;
- с повторно-кратковременным режимом работы.
Этот признак имеет существенное значение для электрических исполнительных механизмов, где режимы работы определяют их тепловые нагрузки.
По способу управления исполнительные механизмы можно разделить на механизмы:
- местного действия;
- дистанционного действия;
- телеуправляемые.
Классификацию исполнительных механизмов можно также вести по другим признакам.
ЭЛЕКТРИЧЕСКИЕ ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ
Электрические исполнительные механизмы получили большое распространение в различных системах автоматики.
Преимущества электрических исполнительных механизмов по сравнению с исполнительными механизмами, использующими для своей работы другие виды энергии, выражаются в следующем:
- неограниченный радиус действия и управления;
- возможность применения при отрицательной температуре;
- простота в эксплуатации;
- отсутствие сложной системы трубопроводов.
В зависимости от применяемого исполнительного двигателя электрические исполнительные механизмы можно разделить на две группы: электродвигательные и электромагнитные.
В электродвигательных исполнительных механизмах, которые иногда называют электрическими приводами, силовым элементом является электродвигатель постоянного или переменного тока.
В электромагнитных исполнительных механизмах силовым элементом является электромагнит постоянного или переменного тока.
2.1. Электрические исполнительные двигатели
Как указывалось выше, основным элементом электрических механизмов является электродвигатель.
В современных системах электроавтоматики нашли широкое применение всевозможные электродвигатели малой мощности постоянного и переменного тока в диапазоне мощности от единиц до сотен ватт.
Требования, предъявляемые к исполнительным электродвигателям, определяются спецификой их эксплуатации, из числа которых в качестве общих можно выделить следующие:
- высокую надёжность;
- максимальное быстродействие;
- высокую точность отработки управляющего сигнала;
- широкий диапазон допустимых нагрузок;
- регулирование скорости в широком диапазоне;
- высокий коэффициент полезного действия;
- минимальные габариты и вес.
Приведённым требованием удовлетворяют двигатели постоянного тока с независимым или самовозбуждением и асинхронные двигатели. Последние в свою очередь, делятся на:
- двигатели с полным немагнитным ротором;
- двигатели с полным ферромагнитным ротором;
- двигатели с ротором в виде беличьей клетки;
- двухфазные.
Асинхронные трёхфазные электродвигатели с короткозамкнутым ротором в качестве исполнительных в системах автоматики не используются, а применяются в основном в качестве приводных. Причины этого видны из анализа механических характеристик (рис.2).
Здесь на рис 2а - характеристика трёхфазного асинхронного электродвигателя с короткозамкнутым ротором; рис.2б - характеристика асинхронного двухфазного электродвигателя с полным ротором; рис.2в - характеристика двигателя постоянного тока с независимым возбуждением.
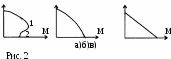
Следует обратить внимание на участок характеристики на рис.2а, на котором зависимость = f (M) неоднозначна, особенно на отрезке 1-2 с положительной крутизной.
Уравнение механической характеристики можно представить в виде:
Мдв = Мп ± F · , (2.1)
где Мдв - вращающий момент на валу двигателя, Н·м;
Мп - пусковой момент, Н·м;
 -
величина, обратная коэффициенту крутизны
механической характеристики,
-
величина, обратная коэффициенту крутизны
механической характеристики,
 ;
;
- угловая скорость вращения.
В свою очередь, пусковой момент можно выразить:
Мп = C·U (2.2)
где
-
 коэффициент пропорциональности,
коэффициент пропорциональности,
Дифференциальное уравнение вращения ротора двигателя:
 , (2.3)
, (2.3)
где J - момент инерции, приведённый к валу двигателя, кг·м2;
Мс - приведённый момент сопротивления, Н·м.
Решая совместно уравнения (2.1), (2.2), (2.3), получим:
 (2.4)
(2.4)
Знак минус соответствует участку 1-2 механической характеристики асинхронного трёхфазного электродвигателя с короткозамкнутым ротором. На этом участке работа двигателя неустойчива, самовыравнивание отрицательное. Такое явление отсутствует у остальных приведённых типов электродвигателей, работа которых устойчива на всём протяжении механических характеристик.
Таким образом, трёхфазные электродвигатели с короткозамкнутым ротором не удовлетворяют ряду пунктов перечисленных требований. Кроме того, для этих двигателей характерна большая кратность пускового тока по отношению к номинальному, что отрицательно сказывается на надёжности работы как двигателя, так и аппаратуры управления. Приведённое выше уравнение (2.4) может быть записано в виде:
 , (2.5)
, (2.5)
 -
постоянная времени, с;
-
постоянная времени, с;
 -
коэффициент передачи,
-
коэффициент передачи,
 .
.
Отсюда очевидна возможность получения коэффициентов дифференциального уравнения двигателя при заданном моменте инерции ротора и параметрах нагрузки с помощью экспериментально снятых механических характеристик.
2.2. Исполнительные двигатели переменного тока.
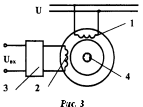 Асинхронные
двухфазные электродвигатели в настоящее
время являются наиболее распространёнными
исполнительными двигателями переменного
тока. Принципиальная схема двигателя
схематично представлена на рис.3.
Электродвигатель имеет две общие
обмотки, расположенные в пазах статора.
Обмотка 1 называется главной (обмоткой
возбуждения) и постоянно находится под
напряжением. На другую обмотку 2 (обмотка
управления) напряжение через управляющий
усилитель 3 подаётся лишь тогда, когда
требуется привести вал 4 двигателя во
вращение. От величины напряжения на
обмотке управления зависит скорость
вращения и механическая мощность,
развиваемая электродвигателем.
Асинхронные
двухфазные электродвигатели в настоящее
время являются наиболее распространёнными
исполнительными двигателями переменного
тока. Принципиальная схема двигателя
схематично представлена на рис.3.
Электродвигатель имеет две общие
обмотки, расположенные в пазах статора.
Обмотка 1 называется главной (обмоткой
возбуждения) и постоянно находится под
напряжением. На другую обмотку 2 (обмотка
управления) напряжение через управляющий
усилитель 3 подаётся лишь тогда, когда
требуется привести вал 4 двигателя во
вращение. От величины напряжения на
обмотке управления зависит скорость
вращения и механическая мощность,
развиваемая электродвигателем.
Для создания вращающегося магнитного поля главная и управляющая обмотки сдвинуты относительно друг друга на 90°. Обе обмотки обычно выполняются с одинаковым количеством витков. Но в тех случаях, когда необходимо уменьшить потребляемую мощность на управление двигателем, число витков управляющей обмотки по сравнению с обмоткой возбуждения увеличивается в 2–3 раза.
Различают два вида исполнения двухфазных асинхронных двигателей: с короткозамкнутым ротором типа "беличья клетка" и полым немагнитным ротором.
Асинхронные двухфазные исполнительные двигатели с ротором типа "беличья клетка" имеют такую же конструкцию и принцип действия, как и трёхфазные асинхронные двигатели с аналогичным ротором. Современная технология позволяет изготовить такие двигатели с очень небольшим воздушным зазором 0,03 – 0,05 мм и высокими энергетическими показателями. Однако у таких двигателей большой момент инерции ротора. Технические характеристики некоторых асинхронных двигателей с ротором типа "беличьей клетки" приведены в табл.2.1.
Если ротор разделить на магнитопроводящую и электропроводящую части и первую сделать неподвижной, а вторую - в виде вращающегося полого цилиндра, получим асинхронный двухфазный двигатель с полым немагнитным ротором (АДП).
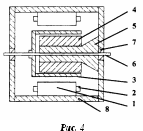 Конструктивное
устройство такого двигателя схематично
показано на рис.4. Магнитопровод внешнего
статора 1, закрепленный в корпусе
8,набирают из листов электротехнической
стали. В пазах статора располагаются
две обмотки (возбуждения и управления),
сдвинутые на 90°.
Конструктивное
устройство такого двигателя схематично
показано на рис.4. Магнитопровод внешнего
статора 1, закрепленный в корпусе
8,набирают из листов электротехнической
стали. В пазах статора располагаются
две обмотки (возбуждения и управления),
сдвинутые на 90°.
Таблица 2.1.
|
Тип двигателя |
f, Гц |
Uв, В |
Uy, В |
nx.x., об/мин |
Тм, мс |
Мл/Мн |
Pн, Вт |
Масса, г |
|
ДКМО, 16 –12 ДКМО, 4 –12 ДКМ1 –12 ДКМ2, 5 –12 ДКМ6 –12 ДКМ16 –12 ДКМ25 –12 ДКМ100 –12 АД –20 АД –25 АД –32 АД –40 АД –50 АДИ –20 АДИ –25 АДИ –32 АДИ –50 2АСМ –50 2АСМ –100 2АСМ –200 2АСМ –400 РД –0911 ДКИ –1,6–ЗАТ ДКИ –4,0–ЗАТ ДКИР –0,4 –0ТВ ДКИР –0,4 –50ТВ |
400 400 400 400 400 400 400 400 400 400 400 400 400 400 400 400 400 50 50 50 50 50 50 50 50 50 |
36 36 115 115 115 115 115 115 24 40 40 40 40 24 40 40 40 20 110 110 110 127 220 220 127 127 |
36 36 36 36 36 80 80 80 24 24 24/40 24/40 24/40 24 24 24 24 20 110 110 110 24 127 127 24 24 |
4000 5000 5000 5500 5500 5000 6100 8000 6000 6500 7000 8000 5000 – – – – 1300' 1280' 1180' 1120' 750' 1800' 1800' – – |
15 20 25 30 40 50 60 350 13 30 20 25 22 13 30 20 25 45 45 – 88 20 10 12 – – |
1,4 1,36 1,8 1,61 1,48 1,5 1,4 1,17 – – – – – – – – – 4,5 1,0 2,8 2,0 1,69 1,84 1,7 – – |
0,16 0,4 1,0 2,5 6 16 25 100 0,3 0,9 1,7 2,5 3,5 0,3 0,8 1,7 2,2 0,67 1,32 2,4 4,6 1,28 2,4 5,0 0,4 0.4 |
40 80 130 250 470 880 – 4000 30 74 130 240 450 – – – – 720 1115 1250 1200 580 500 850 300 300 |
|
Примечание: n' - номинальная частота вращения ротора.
| ||||||||
Магнитопровод внутреннего статора 4 набирают из листов электротехнической стали на цилиндрическом выступе 5 одного из подшипниковых щитов. Этот Магнитопровод служит для уменьшения магнитного сопротивления при прохождении основного магнитного потока через воздушный зазор.
В воздушном зазоре между внешним и внутренним статором находится полый ротор 3, выполненный в виде тонкостенного стакана из немагнитного материала, чаще всего из сплава алюминия и бронзы. Дно ротора жёстко укрепляют на валу 6, который вращается в подшипниках 7.
Принцип действия двигателя с полым немагнитным ротором состоит в следующем. Переменный ток, протекая по обмоткам статора, создаёт вращающееся магнитное поле, которое, пересекая полый ротор, наводит в нём вихревые токи. В результате взаимодействия этих токов с вращающимся магнитным полем возникает момент, который, действуя на ротор, увлекает его в сторону поля.
Однако ротор имеет очень малую массу и, следовательно, незначительный момент инерции, что положительно сказывается на быстродействии двигателя.
Однако исполнительные двигатели такого типа имеют низкие коэффициенты мощности cos и к.п.д., а также менее надёжны при высоких температурах и вибрациях.
Технические характеристики некоторых двигателей с полым ротором приведены в таблице 2.2.
Таблица 2.2