

Технические данные двигателей с полым ротором
|
Тип ИД |
f, кГц |
UВ, в |
Uy, В |
Тм, мс |
, % |
Мкр/Мн |
Рн, Вт |
nн, об/мин |
|
АДП - 023А АДП - 023 АДП – 123 АДП – 262 АДП – 362 ЭМ-1М ЭМ-2М ЭМ-4М ЭМ-8М ДИД - 1ТА ДИД - 2ТА ДИД – ЭТА ДИД - 5ТА И6762 - 037 И6762 – 038 И6762 - 050 ИД-1 ИД-1Д ДАД2-350/50 ДАД6-50/400 |
400 600 500 50 50 400 400 400 400 400 400 400 400 427 427 427 200 200 50 400 |
40 110 110 110 110 115 115 115 115 36 36 36 36 110 110 220 15 15 127 110 |
110 110 110 125 120 60 60 60 80 30 30 30 30 110 110 200 15 15 150 110 |
39 24 64 5 6 15 20 25 30 80 55 25 75 70 130 160 224 224 43 45 |
15 8 15 19,2 29 4,3 8,2 10,5 19 18 20 23 20 – – – – – – – |
1,15 1,67 1,5 1,8 1,8 1,75 2,0 1,84 1.6 1,95 1,89 1,8 1,84 3,1 2,2 4,3 1,59 1,59 1.8 2,0 |
4,0 2,1 4,6 9,6 19 1,18 2,9 4,4 9,0 1,0 2 3 5 2,7 5,6 2,3 1,48 1,48 350 5,0 |
– – 4000 1850 1950 2000 2000 200 2000 18000 16000 8000 6000 – – – – – – – |
Дифференциальное уравнение двигателя можно получить из уравнения вращения якоря:
 ,
(2.6)
,
(2.6)
где - МДВ = Мл - Мт (2.7)
Мл = 2·k1·0·Uy·UВ - пусковой момент (при неподвижном роторе);
k1
- коэффициент пропорциональности,
 ;
;
Uy - напряжение на обмотке управления, В;
UB - напряжение на обмотке возбуждения, В;
0 - угловая скорость вращения поля, рад/с;
Мт = k2·(UB2 + Uy2)· - тормозящий момент;
k2
- коэффициент пропорциональности,
 ;
;
- угловая скорость вращения ротора.
Подставив в (2.7) значение пускового и тормозящего момента, получим:
Мдв = 2·k1·0·Uy·UB - k2·(Uв2 + Uy2)· (2.8)
Это выражение может быть упрощено:
Мдв = С1·Uy - C2·, (2.9)
где
С1
= 2·k1
- 0
- UB, ;С2
= k2
·(UB2
- UB2),
;С2
= k2
·(UB2
- UB2),
 .
.
Подстановка данных уравнения (2.8) в уравнение (2.6) позволяет получить выражение:
 (2.10)
(2.10)
Уравнение (2.10) нелинейно, поскольку значения коэффициентов С1 и С2 переменны и являются функцией напряжения управления и положением рабочей точки на механической характеристике при данном напряжении управления. Однако в условиях эксплуатации в автоматических системах двигатель работает при малых приращениях управляющего сигнала. В этом случае можно линеаризовать дифференциальное уравнение электродвигателя, приняв условно коэффициенты С1 и С2 постоянными. Уравнение (2.10) можно привести к виду:
 ,
(2.11)
,
(2.11)
где  - электромеханическая постоянная, с;
- электромеханическая постоянная, с;
 -
коэффициент передачи,
-
коэффициент передачи,
 ;
;
 -
величина, определяемая условиями работы
двигателя,
-
величина, определяемая условиями работы
двигателя,
 .
.
Этому уравнению соответствует, в зависимости от характера входного сигнала, передаточная функция вида:
 -
выходная величина частота вращения
выходного вала;
-
выходная величина частота вращения
выходного вала;
 -
выходная величина угол поворота выходного
вала.
-
выходная величина угол поворота выходного
вала.
Т.о., двухфазный асинхронный двигатель в первом случае – апериодическое звено, во втором – последовательное соединение апериодического и интегрирующего звеньев.
Асинхронные двигатели вращательного типа просты по конструкции, надёжны в эксплуатации, имеют хорошие рабочие характеристики. Однако, если в технологическом оборудовании происходит поступательное движение, к двигателю подсоединяют механический преобразователь вращательного движения в поступательное. Это усложняет схему привода. Без механического преобразователя можно обойтись, если сам двигатель будет преобразовывать электрическую энергию в механическую поступательного движения. Такие двигатели называются линейными.
В простейшем случае линейный асинхронный двигатель можно получить, если двигатель с полым немагнитным ротором разрезать по диаметру и развернуть на плоскости. При этом магнитное поле получается не вращающимся, а бегущим, и электрическая энергия преобразуется в механическую поступательного движения.
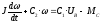
Схема линейного асинхронного двигателя представлена на рис.5а.
 Плоский
магнитопровод статора 1 длиной lc
собран из листовой электротехнической
стали. В пазах статора расположена
трёхфазная
обмотка 2 с числом пар полюсов Р.
Плоский магнитопровод статора
4, собранный из листовой электротехнической
стали, играет роль ярма, по которому
замыкается магнитный поток. Подвижная
часть линейного двигателя 3 называется
ротором и представляет собой металлическую
полосу из меди или алюминия.
Плоский
магнитопровод статора 1 длиной lc
собран из листовой электротехнической
стали. В пазах статора расположена
трёхфазная
обмотка 2 с числом пар полюсов Р.
Плоский магнитопровод статора
4, собранный из листовой электротехнической
стали, играет роль ярма, по которому
замыкается магнитный поток. Подвижная
часть линейного двигателя 3 называется
ротором и представляет собой металлическую
полосу из меди или алюминия.
При
подключении обмотки статора к трехфазной
сети переменного тока с частотой f1
обмотка создает линейно - перемещающееся
магнитное поле Ф
(рис.5.б). За один период тока поле
перемещается в пределах статора,
занимаемого одной парой полюсов. Линейная
скорость поля
 .
Магнитное полеФ
наводит э.д.с. е2
в роторе. Э.д.с. е2
показана на двух условно выделенных из
полосы ротора проводников. Под действием
е2
в роторе проходит ток i2
, взаимодействующий с полем Ф. На каждый
условный проводник действует
электромагнитная сила F.
Сумма всех сил F
представляет собой тяговую силу линейного
двигателя Ртяг,
заставляющую ротор перемещаться вслед
за полем со скоростью V2.
.
Магнитное полеФ
наводит э.д.с. е2
в роторе. Э.д.с. е2
показана на двух условно выделенных из
полосы ротора проводников. Под действием
е2
в роторе проходит ток i2
, взаимодействующий с полем Ф. На каждый
условный проводник действует
электромагнитная сила F.
Сумма всех сил F
представляет собой тяговую силу линейного
двигателя Ртяг,
заставляющую ротор перемещаться вслед
за полем со скоростью V2.
2.3. Асинхронные тахогенераторы
Асинхронная машина является обратимой, т.е. может работать в режиме двигателя и в режиме генератора. В генераторном режиме работы такую машину можно использовать для измерения скорости вращения валов. В этом случае её называют тахогенератором.
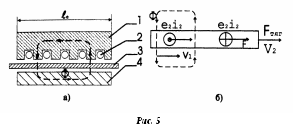
Конструкция асинхронного тахогенератора аналогична конструкции исполнительного асинхронного двигателя с полым ротором. Схема включения обмоток двухфазной асинхронной машины при ее работе в качестве тахогенератора показана на рис.6а.
К обмотке статора В подводится неизменное по амплитуде и частоте напряжение возбуждения U. Вторая обмотка статора Г является генераторной, с её выводов снимается выходной сигнал Ur. В общем случае она замыкается на нагрузочное сопротивление zh.
 Для
рассмотрения принципа действия
асинхронного тахогенератора воспользуемся
эквивалентной схемой (рис.6б). На схеме
полый ротор заменён конечным числом
проводников, замкнутых накоротко на
торцах. Для наглядности проводники
ротора расположены в два слоя. Внешняя
цепь обмотки Г
разомкнута.
Для
рассмотрения принципа действия
асинхронного тахогенератора воспользуемся
эквивалентной схемой (рис.6б). На схеме
полый ротор заменён конечным числом
проводников, замкнутых накоротко на
торцах. Для наглядности проводники
ротора расположены в два слоя. Внешняя
цепь обмотки Г
разомкнута.
При неподвижном роторе тахогенератор можно рассматривать как трансформатор с первичной обмоткой В и вторичной Г. Магнитный поток, созданный обмоткой В, пронизывает ротор и наводит в его проводниках трансформаторную э.д.с. Ет. Поскольку ротор короткозамкнутый, по этим проводникам проходит ток IТ и создаётся магнитодвижущая сила. Следовательно, по оси обмотки В тахогенератора устанавливается магнитный поток Ф., пульсирующий с частотой напряжения возбуждения. При этом э.д.с. Ег в генераторной обмотке равна нулю, т.к. вектор магнитного потока Ф перпендикулярен оси этой обмотки.
Приведём ротор тахогенератора во вращение с частотой n. Из-за симметрии ротора процесс наведения в нём трансформаторной э.д.с. Ет не изменится. По оси обмотки В, как и в предыдущем случае, пульсирует магнитный поток Фв. Проводники ротора вращаются в поле ФВ, и в них наводится э.д.с. вращения (условно показана на внешнем слое проводников).
Под действием э.д.с. вращения в обмотке ротора проходит ток Iвр и создаёт магнитный поток Фг. Направление потока Фг совпадает с осью генераторной обмотки Г. Поскольку ток Iвр прямо пропорционален э.д.с. Евр, созданный им магнитный поток Фг прямо пропорционален частоте вращения ротора n. Магнитный поток Фг индуцирует в генераторной обмотке статора э.д.с. Ег, действующее значение которой определяется выражением Ег = 4,44·г·f1·Фг. Частота Ег совпадает с частотой f1 потока Фг и напряжение возбуждения и не зависит от частоты вращения ротора n.
Поскольку Фг прямо пропорционален частоте вращения ротора, можно записать Ег = k·n, где k - коэффициент, зависящий от конструктивных параметров и направления возбуждения тахогенератора.
Технические характеристики асинхронных тахогенераторов приведены в таблицах 2.3 и 2.4.
Технические данные асинхронных
тахогенераторов серий ТД, AT, ТГ
|
Тип |
UB.H, В |
IB.H, А |
f, Гц |
nmах, об/мин |
|
ТД –1 ТД –2 АТ –231 АТ –261 ТГ –4 ТГ –5А |
110 127 110 110 110 115 |
0,15 0,13 0,25 0,22 0,30 0,06 |
50 50 400 400 400 400 |
2400 2400 4000 4000 6000 9000 |