

3. Промышленные электрические исполнительные механизмы
3.1. Исполнительные механизмы позиционного регулирования
К таким механизмам относятся механизмы типа ДР-М, ДР-1М, ИМ-2/2,5 и ИМТ-4/2,5.
Исполнительный механизм двухпозиционного регулирования типа ДР представляет собой нереверсивный асинхронный двигатель с редуктором и блокирующим устройством, заключённый в корпус. Исполнительный механизм типа ДР-1М имеет выходное устройство для управления поворотными регулирующими органами; ДР-М может воздействовать как на поворотный орган, так и на поступательный, или одновременно на оба.
 Работа
исполнительных механизмов осуществляется
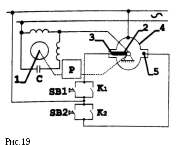
следующим образом. Электродвигатель 1
(рис.19) через систему зубчатых колёс
редуктора приводит во вращение вал
исполнительного механизма. Вал редуктора
кинематически связан с ползуном 2
блокирующего устройства. Пусть скользящий
контакт расположен на левом старт -
контакте 3. При этом исполнительный
механизм работает только при включении
управляющего контактаК1.
После начала работы двигателя скользящий
контакт переходит на блокирующую шину
4. Двигатель работает, минуя блок
управления контактов до тех пор, пока
скользящий контакт не перейдёт на правый
5 старт–контакт. В этом случае цепь
двигателя разрывается и регулирующий
орган остановится в крайнем положении.
При замыкании контактаК2вновь замкнётся цепь питания
электродвигателя, и он начинает вращаться
в том же направлении, перемещая через
редуктор регулирующий орган в
противоположную сторону до тех пор,
пока скользящий контакт не сойдёт с
блокирующей шины на старт-контакт 3. При
этом цепь питания электродвигателя
разомкнётся, он остановится, а регулирующий
орган установится в новое крайнее
положение. КонтактыК1иК2включаются блоком
управленияРБУили оператором
кнопочными станциями.
Работа
исполнительных механизмов осуществляется
следующим образом. Электродвигатель 1
(рис.19) через систему зубчатых колёс
редуктора приводит во вращение вал
исполнительного механизма. Вал редуктора
кинематически связан с ползуном 2
блокирующего устройства. Пусть скользящий
контакт расположен на левом старт -
контакте 3. При этом исполнительный
механизм работает только при включении
управляющего контактаК1.
После начала работы двигателя скользящий
контакт переходит на блокирующую шину
4. Двигатель работает, минуя блок
управления контактов до тех пор, пока
скользящий контакт не перейдёт на правый
5 старт–контакт. В этом случае цепь
двигателя разрывается и регулирующий
орган остановится в крайнем положении.
При замыкании контактаК2вновь замкнётся цепь питания
электродвигателя, и он начинает вращаться
в том же направлении, перемещая через
редуктор регулирующий орган в
противоположную сторону до тех пор,
пока скользящий контакт не сойдёт с
блокирующей шины на старт-контакт 3. При
этом цепь питания электродвигателя
разомкнётся, он остановится, а регулирующий
орган установится в новое крайнее
положение. КонтактыК1иК2включаются блоком
управленияРБУили оператором
кнопочными станциями.
Электрические исполнительные механизмы типов ИМ-2/2,5 и ИМТ-4/2,5 предназначены для быстрого перемещения регулирующих органов в системах позиционного автоматического регулирования и дистанционного управления. Они представляют собой трёхфазные асинхронные реверсивные двигатели с редукторами и конечными выключателями кулачкового типа. Исполнительный механизм типа ИМТ-4/2,5 снабжён также и электромагнитным тормозом, который прекращает движение ротора исполнительного двигателя после отключения его от сети. Схема включения исполнительного механизма показана на рис.20. В схемах автоматического регулирования исполнительные механизмы типов ММ-2/2.5 и ИМТ-4/2,5 работают следующим образом.
Таблица 3.1.
|
Основные характеристики |
ДР–М |
ДР–1М |
|
Угол поворота выходного вала, град. |
– |
180 |
|
Величина хода штока, мм |
20 |
– |
|
Мощность электродвигателя, Вт |
60 |
60 |
|
Частота вращения, об/мин. |
1500 |
1500 |
|
Время полуоборота выходного вала или полного перемещения штока, сек. |
10, 30 |
60, 90,120 |
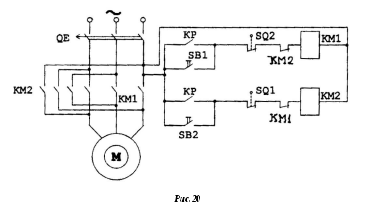 При
отклонении регулируемого параметра от
заданного значения в ту или другую
сторону включается один из командных
контактов регулятораКР, замыкая
при этом цепь соответствующей катушки
магнитного пускателяКМ. Электродвигатель
начинает вращаться в таком направлении,
при котором перемещение регулирующего
органа кинематически связанного с
исполнительным механизмом восстанавливает
оптимальное значение регулируемого
параметра. При этом командный контакт
регулятора разомкнётся, магнитный
пускатель отключится и исполнительный
двигатель остановится. В случае
значительного отклонения регулируемого
параметра или большой инерционности
процесса командный контакт регулятора
не разомкнётся, электродвигатель будет
работать до тех пор, пока регулирующий
орган не придёт в крайнее положение. В
этот момент кулачок, связанный с валом
ротора исполнительного двигателя,
разомкнёт контакт конечного выключателяSQ, включённого в цепь соответствующего
магнитного пускателя и двигатель
остановится.
При
отклонении регулируемого параметра от
заданного значения в ту или другую
сторону включается один из командных
контактов регулятораКР, замыкая
при этом цепь соответствующей катушки
магнитного пускателяКМ. Электродвигатель
начинает вращаться в таком направлении,
при котором перемещение регулирующего
органа кинематически связанного с
исполнительным механизмом восстанавливает
оптимальное значение регулируемого
параметра. При этом командный контакт
регулятора разомкнётся, магнитный
пускатель отключится и исполнительный
двигатель остановится. В случае
значительного отклонения регулируемого
параметра или большой инерционности
процесса командный контакт регулятора
не разомкнётся, электродвигатель будет
работать до тех пор, пока регулирующий
орган не придёт в крайнее положение. В
этот момент кулачок, связанный с валом
ротора исполнительного двигателя,
разомкнёт контакт конечного выключателяSQ, включённого в цепь соответствующего
магнитного пускателя и двигатель
остановится.
Технические данные электрических исполнительных механизмов типов ИМ-2/2,5 и ИМТ-4/2,5
Таблица 3.2.
|
Основные характеристики |
ИМ-2/2,5 |
ИМТ-4/2,5 |
|
Номинальный момент на выходном валу, Н-м |
20,4 |
40,8 |
|
Пусковой момент, Н-м |
30,6 |
51 |
|
Рабочий угол поворота выходного вала, град. |
Любой в пределах 360° | |
|
Время одного оборота, сек |
2,5 |
2,5 |
|
Потребляемая мощность, Вт |
200 |
600 |
|
Напряжение питания, В |
220/380 |
220/380 |
3.2. Исполнительные механизмы пропорционального регулирования
Исполнительные механизмы пропорционального регулирования типов ПР-М и ПР-1М предназначена для перемещения различных регулирующих органов в системах автоматического регулирования, содержащих статический, астатический или изодромный электрический регулятор. Кроме этого, эти механизмы могут быть использованы в схемах позиционного регулирования и ручного дистанционного управления.
Исполнительные механизмы типа ПР состоят из реверсивного двигателя, редуктора и реостата обратной связи. Исполнительный механизм ПР-1М имеет на выходном валу диск и предназначен для воздействия на поворотный регулирующий орган. Исполнительный механизм ПР-М снабжён диском и штоком, поэтому он может быть применён для воздействия как поворотный регулирующий орган, так и на поступательный, или одновременно на оба.
Схема исполнительного механизма ПР-1М представлена на рис.21.
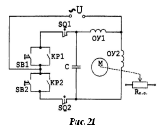 При
замыкании контакта регулирующего
устройстваКР1напряжение на одну
из обмотокОУ1двухфазного
исполнительного двигателя подается
непосредственно из сети, а на другуюОУ2через конденсаторС. Двигатель
вращается в одном направлении воздействуя
через редуктор на регулирующий орган.
При замыкании контакта регулирующего
устройстваКР2двигатель реверсируется.
Контакты конечных выключателейSQ1иSQ2включаются последовательно с
соответствующими контактамиКР1иКР2, обеспечивая разрыв цепи питания
двигателя при подходе регулирующего
органа к крайним положениям. КонтактыКР1иКР2включаются с помощью
блока управления,SB1 иSB2-
оператором. В схему включен реостат
обратной связиRО.С. по
положению валаИМ.
При
замыкании контакта регулирующего
устройстваКР1напряжение на одну
из обмотокОУ1двухфазного
исполнительного двигателя подается
непосредственно из сети, а на другуюОУ2через конденсаторС. Двигатель
вращается в одном направлении воздействуя
через редуктор на регулирующий орган.
При замыкании контакта регулирующего
устройстваКР2двигатель реверсируется.
Контакты конечных выключателейSQ1иSQ2включаются последовательно с
соответствующими контактамиКР1иКР2, обеспечивая разрыв цепи питания
двигателя при подходе регулирующего
органа к крайним положениям. КонтактыКР1иКР2включаются с помощью
блока управления,SB1 иSB2-
оператором. В схему включен реостат
обратной связиRО.С. по
положению валаИМ.
Технические данные электрических исполнительных
механизмов типа ПР-М и ПР-1М
Таблица 3.3.
|
Основные характеристики |
ПР-М |
ПР-1М |
|
Угол поворота выходного вала, град. |
– |
180 |
|
Величина хода штока, мм |
20 |
– |
|
Мощность электродвигателя, Вт |
60 |
60 |
|
Сопротивление ro.c., Ом |
185 |
185 |
|
Частота вращения, об/мин. |
1500 |
1500 |
|
Время полуоборота выходного вала или полного перемещения штока, сек. |
10; 30; 60; 90 | |
 Исполнительный
механизм пропорционального действия
типа ИМ-2/120 состоит из исполнительного
двухфазного асинхронного двигателя,
шестеренчатого редуктора, узла конечных
выключателей и реостата обратной связи
по положению вала исполнительного
механизма. На рис.22 показана схема
включения ИМ-2/120. Одна из обмоток
двухфазного асинхронного двигателя
(ОУ1илиОУ2) включается контактамиКР1илиКР2релейного блока
управления непосредственно в сеть
переменного тока, а вторая - через
конденсатор С. ДвигательМчерез
редуктор воздействует на регулирующий
орган. Конечные выключателиSQ1иSQ2ограничивают перемещение регулирующего
органа в пределах120°. Для уменьшения
инерционного выбега после отключения
двигателя параллельно контактам включены
резисторыR1иR2.
Исполнительный
механизм пропорционального действия
типа ИМ-2/120 состоит из исполнительного
двухфазного асинхронного двигателя,
шестеренчатого редуктора, узла конечных
выключателей и реостата обратной связи
по положению вала исполнительного
механизма. На рис.22 показана схема
включения ИМ-2/120. Одна из обмоток
двухфазного асинхронного двигателя
(ОУ1илиОУ2) включается контактамиКР1илиКР2релейного блока
управления непосредственно в сеть
переменного тока, а вторая - через
конденсатор С. ДвигательМчерез
редуктор воздействует на регулирующий
орган. Конечные выключателиSQ1иSQ2ограничивают перемещение регулирующего
органа в пределах120°. Для уменьшения
инерционного выбега после отключения
двигателя параллельно контактам включены
резисторыR1иR2.
При отклонении регулируемого параметра в ту или другую сторону от заданного значения подвижный контакт реостатного датчика измерительного устройства регулятора сместится от занимаемого им положения в одну или другую сторону на величину, пропорциональную величине отклонения регулируемого параметра. Это вызовет рассогласование измерительной схемы регулятора и на её выходе появится напряжение, знак которого определяется направлением изменения регулируемого параметра. В зависимости от знака напряжения, замкнется тот или иной командный контакт релейного блока регуляторами двигатель исполнительного механизма начинает вращаться перемещая регулирующий орган в сторону увеличения (уменьшения) значения регулируемой величины. Одновременно с этим контакт реостата обратной связи, включенного в измерительную схему регулятора, начнёт перемещаться уменьшая сигнал рассогласования. Когда этот сигнал будет близок к нулю, двигатель исполнительного механизма остановится.
Исполнительные механизмы пропорционального действия типа ИМТ находят применение в устройствах пропорционального автоматического управления, где для перемещения регулирующих органов требуются значительные перестановочные усилия. В этих механизмах используются трёхфазные асинхронные двигатели переменного тока. Исполнительные механизмы снабжены электромагнитным тормозом. Рабочий угол поворота выходного вала исполнительного двигателя может быть установлен любым в пределах 15345°.
Технические характеристики исполнительных механизмов типа ИМ-2/120
Таблица 3.4.
|
Основные характеристики | |
|
Номинальный момент на выходном валу, Н·м Время одного оборота, сек. Максимальный угол поворота, град. Потребляемая мощность, Вт Сопротивление RО.C., Ом |
61,2 120 120 26 120 |
Технические данные исполнительных механизмов типа ИМТ
Таблица 3.5
|
Тип |
Р потребляемая, Вт |
Мн, Н·м |
Время одного оборота, сек |
Рабочий угол, град. |
RО.С., Ом |
|
ИМТ-60/120 ИМТ-250/120М ИМТ-400/120 ИМТ-250/60 ИМТ-1000/120 ИМТ-400/60 |
180 400 600 600 800 800 |
60 250 400 250 1000 400 |
120 120 120 60 120 60 |
15345 |
120 |
Механизм дистанционного управления типа КДУ применяются как исполнительный механизм в системах автоматического регулирования и дистанционного управления.
У исполнительных механизмов типа КДУ используют трёхфазный асинхронный двигатель с редуктором, реверсивный магнитный пускатель с ключом управления и дистанционным указателем положения ДУП.
Принципиальная схема КДУ приведена на рис.23. Ключом управления КУвключают цепи трёхфазного реверсивного магнитного пускателяКМ, обеспечивая требуемое направление вращения исполнительного двигателя.
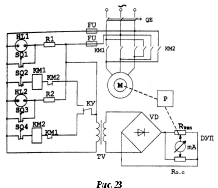 Движок
резистивного датчика указателя положения
связан с рабочим валом. Резистор указателя
ДУП с сопротивлениемRО.С.образует мостовую измерительную схему,
в диагональ которой включёнmA,
градуированный в процентах от максимального
угла поворота рабочего вала. Для
ограничения угла поворота в КДУ используют
конечные выключателиSQ1SQ4.
ВыключателиSQ1иSQ3служат для
принуждающей сигнализации. При приближении
к крайнему положениюSQ1размыкается
и загорается сигнальная лампаHL1.
Если ключ управления не включён, то
исполнительный механизм продолжает
работу до отключенияSQ2. Теперь
движение исполнительного механизма
возможно при противоположном положении
ключаКУс использованием в цепи
управления выключателейSQ2иSQ4.
Движок
резистивного датчика указателя положения
связан с рабочим валом. Резистор указателя
ДУП с сопротивлениемRО.С.образует мостовую измерительную схему,
в диагональ которой включёнmA,
градуированный в процентах от максимального
угла поворота рабочего вала. Для
ограничения угла поворота в КДУ используют
конечные выключателиSQ1SQ4.
ВыключателиSQ1иSQ3служат для
принуждающей сигнализации. При приближении
к крайнему положениюSQ1размыкается
и загорается сигнальная лампаHL1.
Если ключ управления не включён, то
исполнительный механизм продолжает
работу до отключенияSQ2. Теперь
движение исполнительного механизма
возможно при противоположном положении
ключаКУс использованием в цепи
управления выключателейSQ2иSQ4.
В исполнительных механизмах дистанционного управления типа КДУ используются несколько модификаций узлов исполнительного двигателя с редуктором: РБ, РМ, РБМ.
Назначение исполнительных однооборотных механизмов типа МЭО – управление регулирующими органами в бесконтактных и контактных системах автоматического регулирования и дистанционного управления. В механизмах серии МЭО выходной электрический сигнал преобразуется с помощью асинхронного исполнительного двигателя с малоинерционными ротором и редуктором во вращательное движение постоянной скорости.
Технические данные приводов, используемых в механизмах дистанционного управления типа КДУ
Таблица 3.6.
|
Наименование параметра |
Тип двигателя | ||
|
РМ |
РБ |
РБМ | |
|
Тип исполнительного двигателя |
АОЛ-21-4 |
АОЛ-22-4 |
АОЛ-21-4 |
|
Номинальное напряжение и частота |
220/300 В, 50 Гц | ||
|
Номинальная мощность, Вт |
270 |
400 |
2700 |
|
Номинальная частота вращения ротора, об/мин. |
1400 |
1400 |
1400 |
|
Передаточное число редуктора |
2800 |
2800 |
1400 |
|
Частота вращения выходного вала, об/мин, |
0,5 |
0,5 |
1,0 |
|
Максимальный крутящий момент, Н·м |
250 |
1000 |
250 |
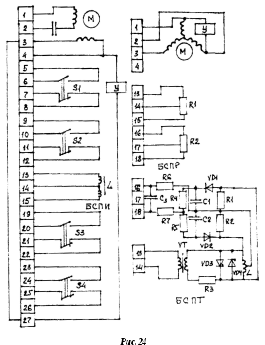
Управление ИМ серии МЭО осуществляется на бесконтактных элементах с помощью магнитных усилителей и контактное – при помощи реверсивных магнитных пускателей. Для привода исполнительных механизмов используют малоинерционные двухфазные асинхронные двигатели типа ДАУ или асинхронные трёхфазные типа 4А.
Для осуществления обратной связи и дистанционного указания выходного вала служат следующие узлы:
1. Блок БСПИ-10, состоящий из двух индуктивных датчиков, четырёх микропереключателей, кулачков, рычагов и элементов настройки. Блок БСПИ применяется с бесконтактными регулирующими приборами.
2. Блок БСПР-10, состоящий из двух реостатных датчиков (по 120 Ом) и четырёх микропереключателей.
3. Блок БСПТ-10, состоящий из токового датчика и четырёх микропереключателей.
Принципиальная схема механизма показана на рис.24.
В связи с большим количеством модификаций исполнительных механизмов типа МЭО их технические характеристики в данном пособии не приводятся.
3.3. Исполните механизмы переменной скорости
Электрические исполнительные механизмы переменной скорости используют в системах автоматики непрерывного действия. Сигнал управления через управляющее устройство непрерывного действия плавно изменяет скорость перестановки исполнительного органа механизма. Сейчас широко применяют исполнительные механизмы с бесконтактным управлением (БИМ, МЭК и др.), так как они наиболее полно отвечают современным требованиям. В таких исполнительных механизмах используют двух– и трёхфазные асинхронные двигатели, частота вращения которых изменяется регулированием подведенного напряжения переменного тока; в качестве бесконтактных управляющих устройств – магнитные усилители.
В системах автоматического регулирования исполнительные механизмы типа БИМ применяются с бесконтактными регуляторами типа БР-11 и БР-21, а также измерительными устройствами, имеющими реостатные датчики с R=120300 Ом.
Рассмотрим схему бесконтактного управления исполнительными механизмами переменной скорости с двухфазным асинхронным двигателем (рис.25).
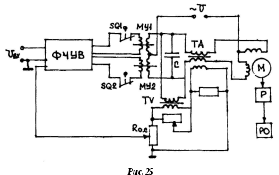 В
управляющую часть схемы входят
фазочувствительный управляемый
выпрямитель ФЧУВ, магнитные усилителиМУ1иМУ2и цепь обратной связи
по частоте вращения вала исполнительного
двигателя, использующая косвенный метод
измерения вращения путём введения
положительной обратной связи по току
от трансформатора токаТАи
отрицательной обратной связи по
напряжению от трансформатора напряженияTV. Рабочие обмотки
усилителей включают последовательно
с обмотками двухфазного асинхронного
двигателя. Вращение двигателя через
редуктор передаётся к регулирующему
органу. В зависимости от значения и фазы
управляющего сигнала переменного токаUВХизменяются
токи в выходных цепяхФЧУВ, а
следовательно, сопротивление рабочих
обмотокМУ. Если при одной фазе
управляющего сигнала открываетсяМУ1и запираетсяМУ2, то при изменении
фазы сигнала на180°запираетсяМУ1и открываетсяМУ2. При этом асинхронный
двигатель реверсируется. ЕслиUBX
= 0, тоМУ1иМУ2не подмагничены
и двигатель неподвижен.
В
управляющую часть схемы входят
фазочувствительный управляемый
выпрямитель ФЧУВ, магнитные усилителиМУ1иМУ2и цепь обратной связи
по частоте вращения вала исполнительного
двигателя, использующая косвенный метод
измерения вращения путём введения
положительной обратной связи по току
от трансформатора токаТАи
отрицательной обратной связи по
напряжению от трансформатора напряженияTV. Рабочие обмотки
усилителей включают последовательно
с обмотками двухфазного асинхронного
двигателя. Вращение двигателя через
редуктор передаётся к регулирующему
органу. В зависимости от значения и фазы
управляющего сигнала переменного токаUВХизменяются
токи в выходных цепяхФЧУВ, а
следовательно, сопротивление рабочих
обмотокМУ. Если при одной фазе
управляющего сигнала открываетсяМУ1и запираетсяМУ2, то при изменении
фазы сигнала на180°запираетсяМУ1и открываетсяМУ2. При этом асинхронный
двигатель реверсируется. ЕслиUBX
= 0, тоМУ1иМУ2не подмагничены
и двигатель неподвижен.
Для расширения диапазона пропорциональной зависимости между частотой вращения двигателя и управляющим сигналом используют отрицательную обратную связь. Коэффициент пропорциональности определяется значением обратной связи в зависимости от положения движка делителя напряжения сопротивления Ro.cю. Конечные выключатели SQ1 и SQ2 , включённые в цепях управления магнитных усилителей, обеспечивают остановку двигателя при подходе регулирующего органа к крайним положениям.
Основные характеристики исполнительных механизмов типа БИМ
Таблица 3.7.
|
Тип исполнительного механизма |
Рн, Вт |
nС, об/мин |
Мн, Н·м |
ip |
ТС, сек |
|
Бим с двухфазным асинхронным двигателем |
60 |
1500 |
80 |
5400 |
120 |
|
Бим с трехфазным асинхронным двигателем |
150 |
1500 |
300 |
2700 |
120 |
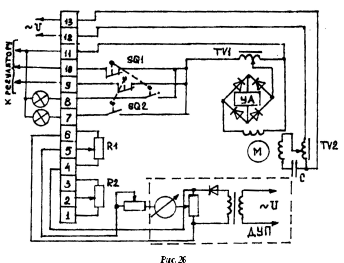 Исполнительные
механизмы типов МЭК-К и МЭК-Б, предназначены
для использования в автоматических
системах с контактным и бесконтактным
управлением, Принципиальная электрическая
схема механизма МЭК-К представлена на
рис.26. В механизме используются
малоинерционный двухфазный асинхронный
двигатель с полым ротором типа АДП.
Наличие двух обмоток позволяет изменением
напряжения на обмотке управления плавно
изменять скорость вращения выходного
вала исполнительного механизма.
АвтотрансформаторыTV1иTV2применяются
для понижения сетевого напряжения до
напряжения110 ± 10 Вна обмотке
возбуждения и115 ± 10 Вна обмотке
управления.
Исполнительные
механизмы типов МЭК-К и МЭК-Б, предназначены
для использования в автоматических
системах с контактным и бесконтактным
управлением, Принципиальная электрическая
схема механизма МЭК-К представлена на
рис.26. В механизме используются
малоинерционный двухфазный асинхронный
двигатель с полым ротором типа АДП.
Наличие двух обмоток позволяет изменением
напряжения на обмотке управления плавно
изменять скорость вращения выходного
вала исполнительного механизма.
АвтотрансформаторыTV1иTV2применяются
для понижения сетевого напряжения до
напряжения110 ± 10 Вна обмотке
возбуждения и115 ± 10 Вна обмотке
управления.
Конечные выключатели SQ1 и SQ2 предназначены для остановки двигателя в крайних положениях. R1 предназначен для указания положения вала исполнительного механизма; R2 - для обратной связи с регулятором. С целью уменьшения выбега выходного вала в механизме применён электромагнитный тормоз, питаемый от выпрямителя. Управление двигателем осуществляется магнитным пускателем типа ПКР.
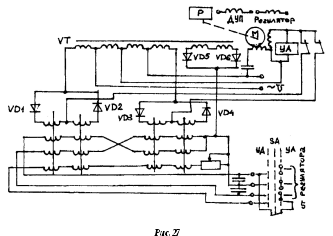
В исполнительных механизмах типа МЭК-Б используется двухфазный асинхронный двигатель, который получает питание от двухтактных магнитных усилителей с внутренней положительной обратной связью. В схему исполнительного механизма (рис.27) входят: двухтактный дифференциальный магнитный усилитель с выходом на переменном токе; дистанционное УД или автоматическое УА управление через командо–аппарат SA ; конечные выключатели SQ1 и SQ2 - для ограничения угла поворота выходного вала двигателя; индуктивный датчик указателя ДУП; индуктивный датчик обратной связи с регулятором; электромагнитный тормоз УА.
 Технические
данные исполнительных механизмов типа
МЭК-К и МЭК-Б
Технические
данные исполнительных механизмов типа
МЭК-К и МЭК-Б
Таблица 3.8.
|
Тип |
Мн, Н·м |
Мп, Н·м |
ТС, сек |
Uп, В |
Рн. Вт |
RО.С., Ом |
|
МЭК-ЮК-120 МЭК-ЮБ-120 МЭК-25К-120 МЭК-25Б-120 МЭК-2К-360 МЭК-2Б-360 МЭК-ЮК-360 МЭК-ЮБ-360 |
100 100 250 250 250 250 100 100 |
150 150 375 375 375 375 150 150 |
120 120 120 120 360 360 360 360 |
127/220 220 127/220 220 127/220 220 127/220 220 |
180 280 275 280 275 280 180 280 |
120 – 120 – 120 – 120 – |
Многооборотные электрические исполнительные механизмы постоянной скорости типа МЭМ предназначены для привода запорной и регулирующей аппаратуры в системах автоматического регулирования и дистанционного управления. Механизм состоит из исполнительного двигателя; муфты предельного момента, отключающей электродвигатель при перегрузках; конечных выключателей, ограничивающих перемещение механизма в крайних положениях; потенциометров для дистанционного указания и обратной связи с регулятором.
Схема дистанционного управления исполнительным механизмом запорного устройства показана на рис.28.
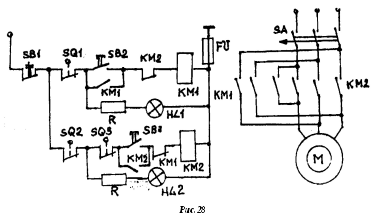 В
момент подачи командного импульса от
кнопок дистанционного управления SB2
и SB3
подаётся питание на соответствующую
катушку реверсивного магнитного
пускателя. Пускатель остаётся включённым
через собственный блокировочный контакт
(КМ1.КМ2) и контакт конечного выключателя
SQ1
и SQ2.
При достижении запорным органом положения
полного открытия или закрытия,
соответствующий конечный выключатель
разрывает цепь питания катушки магнитного
пускателя, Для предотвращения
одновременного включения катушек
предусмотрена электрическая блокировка.
При случайном заклинивании запорного
органа в промежуточном положении
отключение электродвигателя осуществляется
контактом SQ3
муфты предельного момента.
В
момент подачи командного импульса от
кнопок дистанционного управления SB2
и SB3
подаётся питание на соответствующую
катушку реверсивного магнитного
пускателя. Пускатель остаётся включённым
через собственный блокировочный контакт
(КМ1.КМ2) и контакт конечного выключателя
SQ1
и SQ2.
При достижении запорным органом положения
полного открытия или закрытия,
соответствующий конечный выключатель
разрывает цепь питания катушки магнитного
пускателя, Для предотвращения
одновременного включения катушек
предусмотрена электрическая блокировка.
При случайном заклинивании запорного
органа в промежуточном положении
отключение электродвигателя осуществляется
контактом SQ3
муфты предельного момента.
Технические данные исполнительных механизмов типа МЭМ
Таблица 3.9.
|
Тип |
UH, В |
РН, Вт |
МН, Н·м |
ТС, сек |
|
МЭМ-10/1 МЭМ-1 0/2,5 МЭМ-10/6,3 |
220/380 |
600 400 120 |
100 100 100 |
1 2,5 6,3 |