

4.2.2. Тензорезисторні перетворювачі
Принцип дії й конструкція. Тензорезисторний перетворювач (тензорезистор) являє собою провідник, що змінює свій опір при деформації стиснення-розтягання. При деформації провідника змінюються його довжина l площа поперечного перерізу Q. Деформація кристалічної решітки приводить до зміни питомого опору ρ. Ці зміни приводять до зміни опору провідника
R=ρl / Q (4.66)
Цією властивістю володіють у більшому або меншому ступені всі провідники. В теперішній час знаходять застосування провідникові (фольгові, дротові і плівкові) і напівпровідникові тензорезистори. Найкращим вітчизняним матеріалом для виготовлення провідникових тензорезисторів, які використовуються при температурах нижче 180° С, є константан.
Залежність опору Rвід відносної деформаціїδз достатньою точністю описується лінійним двочленом
R=R0 (1+STδ) 4.67
де R0— опір тензорезистора без деформації;SТ— тензочутливість матеріалу.
Тензочутливість константану лежить у межах 2,0-2,1. Нелінійність функції перетворення не перевищує 1%.
Фольгові тензорезистори являють собою тонку лакову плівку, на яку нанесена фольгова тензочутлива решітка (мал. 4.12).
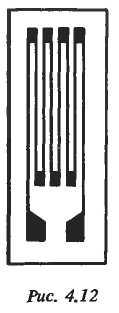
Решітка зверху покрита лаком. Фольгові тензорезистори нечутливі до поперечної деформації внаслідок малого опору перемичок, що з'єднують тензочутливі елементи.
Дротовий тензорезистор має аналогічну будову, але його решітка виконана з константанового дроту товщиною 20-50 мкм. По метрологічних і експлуатаційних характеристиках дротові перетворю-вачі поступаються фольговим.
Фольгові й дротові тензорезистори звичайно мають довжину 5-20 мм, ширину 3-10 мм. Їх номінальний опір дорівнює 50, 100, 200, 400 і 800 Ом. Параметри тензорезисторів загального призначення регламентує ГОСТ 21616-76.
Напівпровідникові тензорезистори являють собою пластинку монокристалу кремнію або германію довжиною 5-10 мм, шириною 0,2-0,8 мм. До її торців приварені вивідні провідники. Номінальний опір лежить у межах 50-800 Ом. Властивості напівпровідникових і металевих перетворювачів сильно різняться. Тензочутливість напівпровідникових перетворювачів лежить у межах SТ =55÷130. Як опір, так і чутливість сильно залежать від температури. Недоліком є також великий розкид параметрів і характеристик.
Тензорезистори застосовуються для перетворення деформації деталей у зміну опору. Для цього вони приклеюються до цих деталей і зазнають однакової з ними деформації.
Схеми включення. Найбільш часто тензорезисторні перетворювачі включаються в схему нерівноважного моста (мал. 4.13, а).

Якщо опір навантаження RH досить великий (режим холостого ходу), то вихідна напруга моста
UX=UR1/(R1+R2)-UR3/(R3+R4)=
U[(R1R4-R2R3)/(R1+R2)(R3+R4)] (4.68)
де U- напруга живлення. У якості R1іR2включаються однакові тензорезистори.
При відсутності вимірюваної деформації їхні опори рівні: R10 = R20=R0Крім того, звичайно вибираютьR3= R4У цьому випадку, коли деформація тензорезистора відсутня(δ = 0), UХ = 0.
При деформації тензорезисторів, коли δ ≠ 0 і R1 ≠ R2, вихідна напруга моста пропорційна різниці опорів тензорезисторів:
UX=U(R1-R2)/2(R1+R2) (4.69)
Мостовий ланцюг є диференціальним, отже, у ньому й компенсуються адитивні похибки. Із застосуванням мостового ланцюга тензорезисторні прилади будуються за диференціальною схемою першого або другого типу.
При використанні диференціальної схеми першого типу, тобто при R1= R0+ ΔR і R2= R0, вихідна напруга ланцюга й чутливість у режимі холостого ходу

При використанні диференціальної схеми другого типу, тобто при R1= R0+ ΔR і R2= R0- ΔR, вихідна напруга ланцюга й чутливість у режимі холостого ходу збільшується вдвічі

При Rн ≠ ∞вихідна напруга й чутливість менше отриманих значень.
Вихідна напруга тензорезисторного моста звичайно не перевищує 10-20 мВ. Для подальшого перетворення таку напругу без посилення використати важко. Тому в тензорезисторних пристроях звичайно використо-вуються підсилювачі.
Якщо напруга живлення моста Uне стабілізована, то при його варіаціях можлива мультиплікативна похибка. Для її виключення використовується компенсаційний метод вимірювання вихідної напруги моста. Принципова схема тензорезисторного приладу, у якому реалізований цей метод і який призначений для використання в силовимірювальних і ваговимірюва-льних системах, наведена на мал. 4.13, б.
Міст М1 містить у собі два або чотири тензорезистора. Внаслідок технологічного розкиду значень їхніх опорів міст не врівноважений і має деяку вихідну напругу. При нульовому значенні вимірюваної величини ця напруга компенсується за допомогою моста М2 підстроєчними резисторами R1 і R2. Результуюча напруга U пропорційна вимірюваній величині. Міст М3 служить для компенсації цієї напруги. Його вихідна напруга UК включена зустрічно напрузі U. Різниця напруг U - UK підсилюється підсилювачем А и подається на реверсивний двигун РД. При цьому ротор двигуна, обертаючись, через редуктор Р переміщає движок реохорда R3 і покажчик приладу відносно шкали. Переміщення движка реохорда здійснюється так, щоб зменшувалася різниця U - UK. Ротор зупиняється, коли U - UK = 0, при цьому движок реохорда займає положення, що відповідає значенню напруги U, а покажчик приладу - положення,що відповідає значенню вимірюваної величини.
Мости М1, М2, М3 живляться від одного джерела змінної напруги, від різних обмоток трансформатора. При нестабільності джерела живлення напруги U1 U2, U3 змінюються пропорційно й рівність U=UK не порушується. Не змінюється й показання приладу. Основна похибка вимірювання становить ±0,5% від нормованого значення, яке рівне 2ΔRmax, де ΔRmax - максимальне значення приросту опору плеча моста.
Похибка тензорезисторних перетворювачів. Тензорезистори можуть використовуватися або для вимірювання механічних напруг і деформацій, або для вимірювання інших механічних величин: сили, тиску, прискорень і ін., коли деформація є проміжною величиною перетворення. У першому випадку для градуювання тензорезисторів з партії відбирають кілька штук і вони наклеюються на зразкову балку. За допомогою гир у балці створюють визначені деформації є. За значеннями деформацій і відповідних їм опорам розраховується чутливість наклеєних тензорезисторів

Це значення приймається в якості номінального для всієї партії. Чутливість інших тензорезисторів тієї ж партії може відрізнятися від номінальної на 2-10%.
У другому випадку тензорезистори є постійними перетворювачами датчика. Відхилення їх чутливості від номінального значення враховується при градуюванні приладу, і результуюча похибка приладу значно менше, ніж у першому випадку, і находитcя в межах 0,2-0,5%.
Похибка може виникнути внаслідок температурних змін опору перетворювача. При зміні температури воно змінюється як внаслідок зміни питомого опору матеріалу, так і внаслідок зміни натягу через різні температурні коефіцієнти подовження тензорезистора βТ і деталі βД, на яку він наклеєний. Повна зміна опору

де R0 — опір тензорезистора при нормальній температурі; S - його чутливість; α- температурний коефіцієнт опору; Δt- зміна температури.
Температурний коефіцієнт опору константану можна змінювати, змінюючи його термообробку Завдяки цьому тензорезистори можна виготовляти так, щоб при наклейці на певний матеріал його опір не залежав від температури. Такі тензорезистори називаються термокомпенсованими.
Температурна похибка провідникових тензорезисторів в основному має адитивний характер. Для її компенсації використовуються диференціальні схеми. При вимірюванні механічних напруг застосовують схему першого типу із двома або чотирма тензорезисторами. Робочі тензорезистори наклеюють на досліджувану деталь уздовж очікуваної деформації, а компенсаційні - поперек її. При вимірюванні інших величин, наприклад сили, використовується диференціальна схема другого типу. При цьому на силовимірювальну пружину з різних сторін наклеюють два тензорезистора, так що при вигині пружини під дією сили один з них розтягується, інший - стискується. В обох випадках температурні умови й температурні зміни опорів тензорезисторів однакові.
Тензорезистори включаються в суміжні плечі моста, і це компенсує температурну погрішність. Для збільшення чутливості на силовимірювальну пружину можна наклеїти чотири тензорезистори, причому перетворювачі, що сприймають деформації одного знака, повинні включатися в протилежні плечі моста.
У тензорезисторних приладах високої точності й для одержання датчиків з уніфікованими характеристиками, щоб забезпечити їхню взаємозамінність, застосовуються мостові схеми з резисторами, що нормують (мал. 4.14, а). На приведеній нижче схемі
Rl- R4– тензорезистори;
Rбі R'б- резистори, що служать для балансування моста;
RTlі R'1— термозалежні резистори для компенсації адитивної температурної похибки;
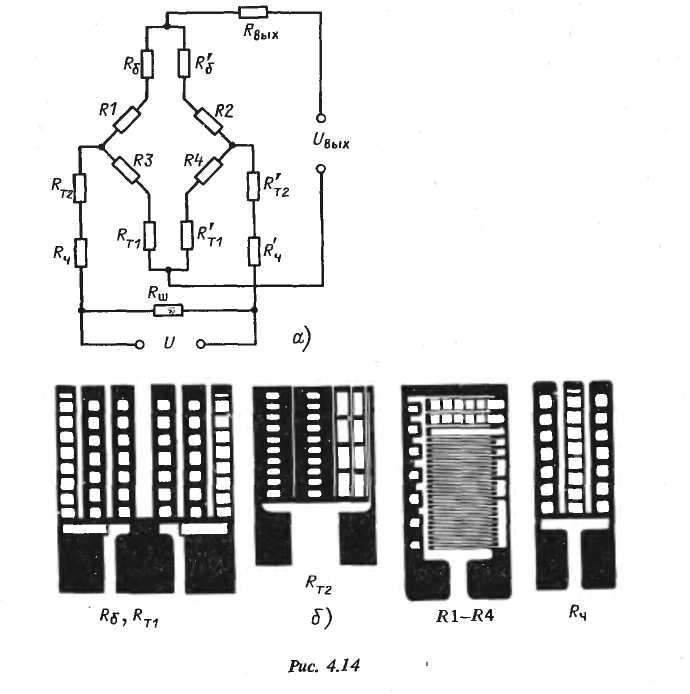
RЧі R'Ч- резистори, змінюючи опори яких, можна регулювати чутливість датчика;
RT2і R'Т2- термозалежні резистори, за допомогою яких компенсується температурна зміна чутливості;
RШі RВЫХ-резистори, що служать для регулювання вхідного й вихідного опорівмоста.
Фольгові резистори, що нормують, показані на мал. 4.14, б. Вони зроблені так, що, обриваючи ту або іншу перемичку на фольговій решітці, можна змінювати значення опору й тим самим регулювати параметри й характеристики тензорезисторного моста й приладу в цілому. Резистори Rб і RЧ виготовлені з константанової фольги, RT1 - з мідної, RT2 - з нікелевої.
При використанні мостових схем з резисторами, що нормують, погрішність датчиків з фольговими тензорезисторами знижується до 0,03-0,05%, а в датчиків з напівпровідниковими тензорезисторами - до 0,1%