

4.2.1. Реостатні перетворювачі
Принцип дії і конструкція. Реостатний перетворювач — це прецизійний реостат, повзунок якого переміщається під дією вимірюваної величини. Вхідною величиною перетворювача є кутове лінійне переміщення повзунка, вихідний - зміна його опору.
Конструкцію перетворювача зображено на мал. 4.6. Він складається з корпуса 1, на який намотаний дріт 2, виготовлений з матеріалу з високим питомим опором, і струмозйомного повзунка 3, закріпленого на осі 4. Повзунок торкається дроту 2. Для забезпечення електричного контакту в місці торкання обмотка зачищається від ізоляції. У показаній конструкції контакт із рухомим повзунком здійснюється за допомогою нерухомого струмозйомного кільця 5.

Обмотка робиться звичайно із дроту, виготовленого з манганіну, константану, фехралю. Для підвищення точності і надійності вона виконується із дроту з платино-іридієвого сплаву.
Для забезпечення гарного контакту повзунок повинен притискатися до обмотки силою 10-3-10-4Н. Сила створюється завдяки пружності повзунка. При вимірюванні змінних величин, при переході повзунка з одного витка на іншій він "підскакує", виникає пульсуюча сила, що можепорушити контакт. Із-за цієї причини, якщо перетворювач застосовується для вимірювання змінних величин або працює при вібрації, то сила притискання повиннабути збільшена.
Але більша сила притискання небажана, оскільки при її збільшенні зростає сила тертя, що перешкоджає переміщенню повзунка і збільшує зношування обмотки й контактуючої поверхні повзунка.
У вимірювальній техніці потрібні реостатні перетворювачі як з лінійною, так і з нелінійною функцією перетворення. Одним із способів побудови перетворювачів з нелінійною функцією перетворення R = f(x) (мал. 4.7,а) є використання корпуса зі змінною висотою (мал. 4.7, б). При переміщенні повзунка уздовж каркаса на величину кроку обмотки Δх = опір змінюється на
ΔR=(dR/dx) , (4.51)
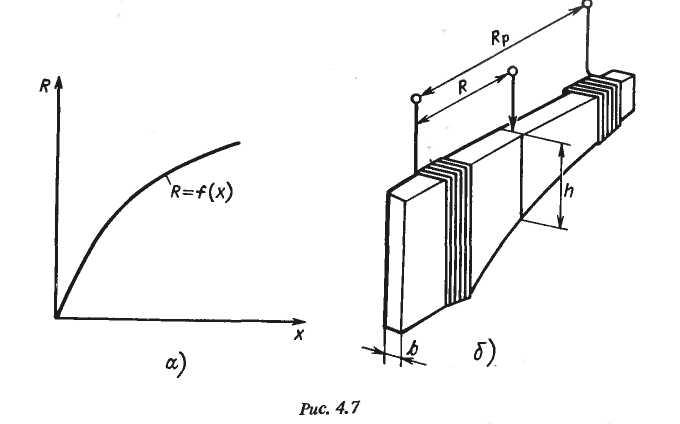
де dR/dx — похідна необхідної функції перетворення R=f(х) по переміщенню пповзунка х. При переміщенні повзунка з одного витка на інший опір змінюється на величину
![]() (4,52)
(4,52)
де p1 — опір одиниці довжини проводу; lПр — довжина одного витка проводу; h — висота каркаса; b - його товщина. З (4.51) і (4.52) можна визначити залежність висоти каркаса h від заданої функції перетворення
![]() (4.53)
(4.53)
Якщо потрібна лінійна функція перетворення, то dR/dx = const і висота каркаса повинна бути постійною.
Виготовлення каркаса з безупинно, що змінюється висотою, більш складно, ніж виготовлення каркаса з постійною висотою. Для спрощення технології прибігають до кусочно-лінійної апроксимації заданої нелінійної функції перетворення (мал. 4.8,а). Для кожного інтервалу переміщення повзунка х, на якому апроксимуюча функція лінійна, висота каркаса постійна. Каркас перетворювача виходить східчастим, як показано на мал. 4.8, б. Число щаблів дорівнює числу інтервалів кусочно-лінійної апроксимації.
Потенціометрична схема включення реостатного перетворювача. Перетворювач може включатися в електричний ланцюг по потенціометричній схемі (мал. 4.9, а).

Напруга з його повзунка подається на навантаженняRH. Розглянемо залежність напруги на навантаженні відзміни опору R перетворювача.
Якщо опір RH настільки великий (RH >>Rp), що струмом у цьому опорі можна знехтувати в порівнянні зі струмом в опоріRp, то реостатнийперетворювач працює в режимі холостого ходу й напруга на навантаженні
![]()
пропорційно опору R.
Якщо реостатний перетворювач має пропорційну функцію перетворення R=(Rp/l)х, то напруга UH пропорційно переміщенню повзунка
![]()
Для аналізу ланцюга, у якому опір навантаження RH порівнянний з номінальним опором перетворювача Rp, використаємо теорему про активний двухполюсник. Для визначення струму в деякому опорі RH досліджуваний ланцюг можна представити в якості активного двухполюсника, що має внутрішній опір Ri і напруга холостого ходу Uх (мал. 4.9, б). До затискачів двухполюсникапідключений опірRH. Напруга на навантаженні
![]()
При цьому напруга Uxвизначається виразом (4.54), а напруга на навантаженні
 З
мал. 4.9, а слідує
З
мал. 4.9, а слідує
![]()
Підставивши (4.58) в (4.57), одержимо

де β = R/Rp- відносна зміна опору перетворювача;a =Rp/RH- коефіцієнт навантаження.
Залежність UH від β для різних а наведена на мал. 4.10. Якщо а настільки мале, що аβ << 1 (режим холостого ходу), то UH змінюється пропорційно β. При збільшенні коефіцієнта навантаження а залежністьстає нелінійною, причому нелінійність зростає зі збільшенням а.
 рис
4.10
рис
4.10
Якщо в якості номінальної функції перетворення прийняти залежність (4.54), представлену прямою 1 на мал. 4.11, а, то абсолютна похибка внаслідок нелінійності
Оскільки Ux = βUмаксимальна напруга на навантаженні дорівнюєU, то приведена похибка

При а < 0,1похибка максимальна приβ=2/3. У цьому випадку
![]()

Для зменшення похибки варто зменшувати а, тобто збільшуватиRH. Однак практично значення опору навантаження часто невеликі. У цьому випадку для зменшення похибки можна більш раціонально вибрати номінальну функцію перетворення. Нехай дійсною функцієюперетворення є крива 2. Заномінальну функцію перетворення більш доцільно прийнятипряму 3. При цьому, як видно із графіка, на інтервалах 0 - а, а - b, b-c похибка значно зменшена. Зменшена вона й в інтервалі c-d, хоча і залишається досить великою. Для того щоб похибка усюди була малою, діапазон зміни опору перетворювача варто обмежити значенням R1p, а додатковий опір RД =Rp - R1p виконати на окремому резисторі та включити його послідовно з перетворювачем (мал. 4.11, б).
Похибка реостатного перетворювача. Зі зміною температури змінюється опір перетворювача. В основному це обумовлюється температурною зміною питомого опору дроту.Опір перетворювача визначається відомою формулою

Похибку (зміна напруги на навантаженні) можна розрахувати, виходячи зі схеми включення, номінальних значень опорів, що входять у неї і їхніх температурних коефіцієнтів. При включенні перетворювача по потенціометричній схемі в режимі холостого ходу зміна температури не змінює розподіл напруги і температурна похибка відсутня.
Реостатному перетворювачу властива також похибка дискретності. Вона обумовлена стрибкоподібною зміною опору перетворювача ΔR при переході повзунка з одного витка на іншій. Якщо в якості номінальної функції перетворення прийняти функцію, що проходить посередині "східців", то максимальне значення приведеної похибки, обумовлено дискретністю
![]()
де Rp — повний опір перетворювача.
Якщо перетворювач має пропорційну функцію перетворення, то "скачки" опору будуть однакові по всьому діапазону переміщення повзунка. У цьому випадку Rp = nΔR і

де п — число витків в обмотці.
Тертя в реостатному перетворювачі викликає випадкові гістерезисні зміни сили й моменту, які необхідні для переміщення повзунка по обмотці. Це може призвести до виникнення похибки перетворювача, що передує реостатній.