

4.2.5. Індуктивні перетворювачі
Принцип дії й конструкція. Індуктивний перетворювач являє собою котушку індуктивності (дросель), повний опір якої змінюється при взаємному відносному переміщенні елементів магнітопроводу. Є дві групи перетворювачів: з індуктивністю, що змінюється, і з активним опором, що змінюється. Приклад схеми перетворювача першої групи показаний на мал. 4.23, а. Перетворювач складається з П-подібного магнітопроводу 1, на якому розмішена котушка 2, і рухливого якоря 3. При переміщенні якоря змінюється довжина повітряного зазору а, отже, магнітний опір, що викликає зміну індуктивності дроселя змінюється. Інша широко використовувана модифікація (плунжерний перетворювач) показана на мал. 4.23, б. Перетворювач являє собою котушку 1, з якої може висуватися феромагнітний сердечник 2 (плунжер). При середньому положенні плунжера індуктивність максимальна.

Схема перетворювача другої групи наведена на мал. 4.23, в. У зазор магнітного ланцюга 1 уводиться пластинка 2 з високою електропровідністю, у якій наводяться вихрові струми, що приводять до збільшення втрат активної потужності котушки 3. Це еквівалентно збільшенню її активного опору.
Функція перетворення перетворювача мал. 4.23, а з деякими допущеннями може бути отримана в такий спосіб. Як відомо, індуктивність котушки
![]()
де w — число витків; Ф — пронизуючий її магнітний потік; І -протікаючий по котушці струм.
Струм пов'язаний із МДС Hlспіввідношенням
![]()
Підставляючи (4.96) в (4.95), одержимо
![]()
де RM=Hl/Ф — магнітний опір перетворювача.
Якщо знехтувати розсіюванням магнітного потоку й нелінійністю кривої намагнічування сталі, то для перетворювача за схемою мал. 4.23, а магнітний опір
![]()
де RCT — магнітний опір сталевих ділянок магнітопровода;lCT— довжина середньої силової лінії по сталевих ділянках;QCT — їхній поперечний переріз;r— магнітна проникність стали;0= 410-7Гн/м — магнітна постійна; R3— магнітний опір повітряних зазорів, що мають довжинубі перетинQ.
Будемо вважати QCT = QПри цьому індуктивність перетворювача
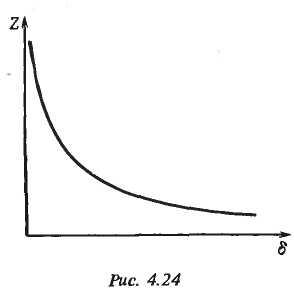
Якщо знехтувати активним опором дроселя, то функція перетворювача, тобто залежність електричного опору Z від розміру повітряного зазору б, можна записати у вигляді такої залежності

В останній рівності мається на увазі, що 2бlCT /rвнаслідок великого значення магнітної проникності магнітопроводу. Графік функції перетворення індуктивного перетворювача, наведеного на мал. 4.23а, показаний на мал. 4.24.
Під чутливістю індуктивного перетворювача часто розуміють відношення
![]()
![]()
Індуктивний перетворювач є електромагнітом, його сила притягання, що зростає зі збільшенням чутливості, нелінійно залежить від переміщення якоря й може бути причиною погрішності перетворювача, що передує індуктивному.
Описані одинарні індуктивні перетворювачі мають ряд недоліків: їхні функції перетворення нелінейні; адитивні погрішності, зокрема погрішність реального перетворювача, викликана температурною зміною активного опору обмотки, велика; сила притягання якоря значна.
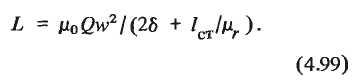
Цих недоліків позбавлені диференціальні перетворювачі. Вони складаються із двох однакових одинарних перетворювачів, які мають загальний рухливий елемент. Приклади схем таких перетворювачів наведені на мал. 4.25. При переміщенні якоря одна індуктивність L1зростає, інша L2— зменшується. Диференціальні індуктивні перетворювачі включаються в диференціальні ланцюги другого типу. Завдяки використанню цих ланцюгів зменшується адитивна погрішність, поліпшується лінійність функції перетворення, в 2 рази зростає чутливість і зменшується сила притягання якоря.
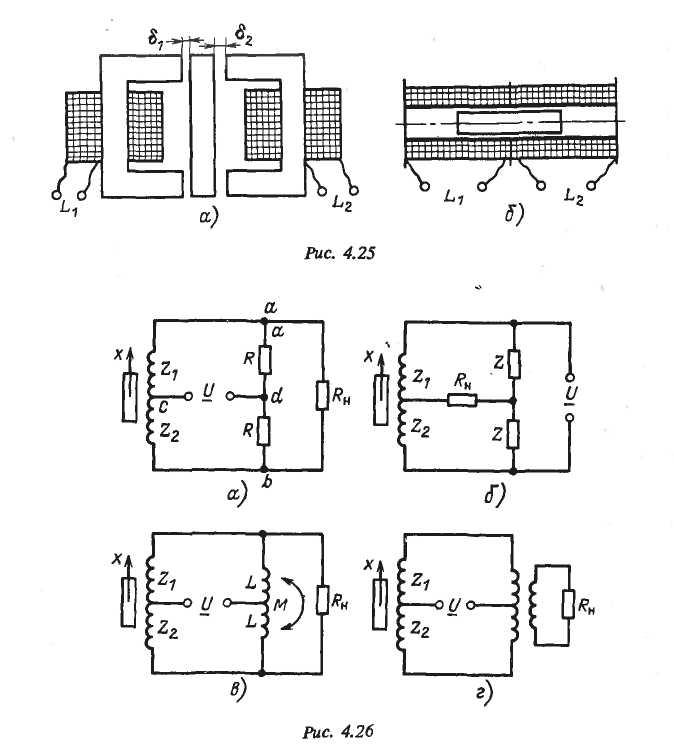
Схеми включення. Основними диференціальними схемами включення індуктивних перетворювачів є мостові схеми (мал. 4.26), де в загальному випадку Z1= Rпp + jωL1і Z2= Rпp +jωL2— повні опори секцій диференціальних індуктивних перетворювачів. Опори інших плечей можуть бути як активними, так і реактивними. В якості таких плечей можуть служити секції двох-обмотувального дроселя (мал. 4.26, в) або трансформатора із двухсекційною первинною обмоткою (мал. 4.26, г).
Джерело живлення Uі навантаженняRHможуть мінятися місцями (мал. 4.26, а й б), при цьому чутливість мосту також змінюється.
Мости звичайно проектують так, що напруга на вимірювальній діагоналі відсутнє, якщо на диференціальний перетворювач не впливає вхідна величина і його якір перебуває в середньому положенні. При цьому опору плечей Z1іZ2 рівні між собою, їх значення приймаємо заZ0.При переміщенні якоря опір однієї секції стає рівнимZ1=Z0+ ΔZ1опір іншийZ2=Z0+ ΔZ2Зміни опорівΔZ1 = jωΔL1 іΔZ2 = jωΔL2.відповідають деякому переміщенню якоря щодо його середнього положення, у загальному випадку не рівні між собою в силу нелінійності функції перетворення. Однак якщо переміщення мале, то їх розходження незначні. Припустимо, що при малих переміщеннях якоря щодо його середнього положення зміна опорів лінійно залежить від переміщення якорях. При цьому
![]()
Зміни опорів перетворювачів звичайно невеликі, і можна вважати, що напруга на вимірювальній діагоналі мосту змінюється пропорційно ΔZ/Z. У цьому випадку функція перетворення мостової схеми характеризується тільки чутливістю
![]()
Де UВЫХ- напруга на вимірювальній діагоналі при зміні опору перетворювача, рівномуΔZ, Scx – чутливість схеми
Погрішність індуктивних перетворювачів.Температурна погрішність індуктивних перетворювачів в основному обумовлена зміною активної складової їхнього опору. Ця погрішність адитивна й зменшується у випадку застосування мостових схем. Крім того, при зміні температури змінюється магнітна проникність сталі, що приводить до деякої додаткової зміни адитивної і мультиплікативної погрішностей.
При зміні напруги живлення міняється магнітна проникність магнітопроводу перетворювача, а отже, його опір й чутливість. Змінюється також чутливість мостового вимірювального ланцюга. Зміна опору приводить до адитивної погрішності й компенсується мостовим ланцюгом. Зміна чутливості створює мультиплікативну погрішність. Для її зменшення або стабілізують напругу джерела живлення мосту, або застосовують компенсаційні схеми виміру.
Зміна частоти живлячої напруги приводить до зміни опору резисторів, включених у міст, і міняє чутливість. Малу погрішність мають мостові схеми (мал. 4,26,б), у яких чутливість у режимі холостого ходу.Sсх,хне залежить від параметрів ланцюга. В інших схемах для зменшення погрішності потрібно стабілізувати частоту живлячої напруги.
При переміщенні якоря перетворювача змінюється вихідна напруга мосту. При середньому положенні якоря повинно бутиUвых = 0. Однак практично є невелика напруга, що приводить до адитивно]погрішності вимірювального мосту. Для балансування мостів змінного струму необхідне роздільне регулювання дійсної і уявної складових його вихідної напруги. У мостах з індуктивними перетворювачами одна складова регулюється переміщенням якоря перетворювача, інша - шляхом регулювання інших опорів (наприклад, опорів R у схемі мал. 4.26,а). Якщо регулювання зроблене недостатньо ретельно, то зміною положення якоря не можна повністю збалансувати схему.
Інша причина погрішності мосту полягає в тім, що в живлячій напрузі крім напруги з основною частотою є складові із кратними частотами й із частотою промислової мережі. Реальний міст змінного струму, що живиться такою напругою повністю збалансувати неможливо. Для зменшення похибки використовують фазочутливий випрямляч. Його середній струм
![]()
де U - напруга живлення на вході; φ - фазовий кут між вимірюваною й керуючою напругою; k- коефіцієнт пропорційності, що залежить від параметрів випрямляча.
Прилад проектується так, щоб напруга розбалансу мосту, викликана переміщенням якоря перетворювача, була у фазі з керуючою напругою, а напруга, викликана поганим підбором опорів, було зсунута на кут φ = /2. При цьому вихідний струм випрямляча буде визначатися тільки переміщенням якоря індуктивного перетворювача.
Фазочутливий випрямляч випрямляє напругу, що має ту ж частоту, що й керуюча напруга, і частоту його непарних гармонік. Це значно зменшує адитивну погрішність, викликану наявністю вищих гармонік у напрузі живлення мосту.