

10 Разработка алгоритма работы блока обмена данными по последовательному каналу связи
Алгоритм обмена информацией по последовательному каналу связи представлен на рисунке 14.

Рисунок 14 – Алгоритм обмена информацией по последовательному каналу связи
В блоке 1 осуществляется прием информации по последовательному каналу связи символа. В блоке 2 проверяется является ли принятый символ символом D. Для этого из кода принятого символа вычитается код символа D и анализируется флаг переноса. Если принятый символ является символом D, то управление передается на блок 4, иначе на блок 3. В блоке 4 в линию связи передается значение переменной в которой хранится Y1. В блоке 3 проверяется, является ли принятый символ символом А. Для этого из кода принятого символа вычитается код символа А и анализируется флаг переноса. Если принятый символ является символом А, то в блоке 5 в линию связи передается значение переменной, в которой хранится Y4.
USART – это модуль последовательного ввода/вывода, который может работать в полнодуплексном асинхронном режиме для связи с терминалами, персональными компьютерами или синхронном полудуплексном режиме для связи с микросхемами.
Согласно формуле для вычисления скорости обмена в бодах (относительно внутреннего тактового сигнала микроконтроллера), учитывая требуемую скорость и Fosc, выбирается самое близкое целое значение для записи в регистр SPBRG.
Для асинхронного
низкоскоростного режима
![]() отсюда
отсюда![]()
Скорость:
![]()
Для асинхронного
высокоскоростного режима
![]() отсюда
отсюда![]()
Скорость:
![]()
Соответственно, выбираем высокоскоростной режим.
Настройка модуля USARTвыглядит следующим образом.
;---------------ИНИЦИАЛИЗАЦИЯ USART----------------
BANKSEL TXSTA
MOVLW B'01100000' ; УСТАНОВКА 9-РАЗРЯДНОЙ ПЕРЕДАЧИ, АСИНХРОННОГО РЕЖИМА, НИЗКОСКОРОСТНОЙ
MOVWF TXSTA ;РАЗРЕШЕНИЕ ПЕРЕДАЧИ
MOVLW 0xCF ;УСТАНОВКА СКОРОСТИ 1200 бит/с
MOVWF SPBRG
BANKSEL RCSTA ;ВЫБОР БАНКА С РЕГИСТРОМ RCSTA
MOVLW B'10000000' ; РАЗРЕШИТЬ РАБОТУ USART, ЗАПРЕТИТЬ ПРИЕМ
MOVWF RCSTA
11 Разработка алгоритма работы блока взаимодействия с оператором
Алгоритм работы блока взамодействия с оператором представлен на рисунке 15.
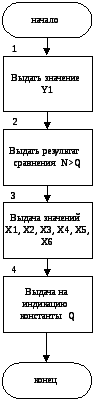
Рисунок 15 – Алгоритм работы блока взаимодействия с оператором
В блоке 1 обеспечивается выдача на индикацию значения Y1.
В блоке 2 обеспечивается выдача на индикацию результат сравнения N>Q.
В блоке 3 обеспечивается выдача на индикацию сигналов двоичных датчиков X1, X2, X3, X4, X5, X6.
В блоке 4 обеспечивается выдача на индикацию константы Q.
В блоке 5 выход из прерывания на начало программы обработки.
12 Разработка алгоритма работы блока обработки аварийных ситуаций
Алгоритм обработки аварийных ситуаций представлен на рисунке 16.

Рисунок 16 – Алгоритм обработки прерывания от блока питания
В блоке 1 проверяется наличие питания.
В блоке 2 вырабатывается сигнал Y5 установки внешних устройств в исходное состояние.
В блоке 3 вырабатывается сигнал для отображения аварийной световой индикации на ПУ.
В блоке 4 в последовательный канал связи передается код символа «!»
В блоке 5 МК переводится в режим пониженного энергопотребления.
В блоке 6 проверяется значение X0.
В блоке 7 на пульте управления включается аварийная сигнализация.
В блоке 8 обеспечивается выдача на индикацию сигналов двоичных датчиков.
В блоке 9 обеспечивается выдача на индикацию цифрового кода N1, поступающего с АЦП.
В блоке 10 микроконтроллер переводится в режим пониженного энергопотребления.