

4 Разработка принципиальной схемы блока вывода управляющих сигналов
Данный блок формирует управляющие воздействия Y1–Y5. Схема блока приведена на рисунке 6. Бинарные управляющие воздействияY1,Y2,Y3,Y5 подаются на объект управления через эмиттерные повторители на транзисторахVT1–VT4 типа КТ503А, осуществляющие усиление выходных сигналов по току. Для формирования аналогового управляющего сигналаY4 используется 8-разрядный ЦАПAD5330.
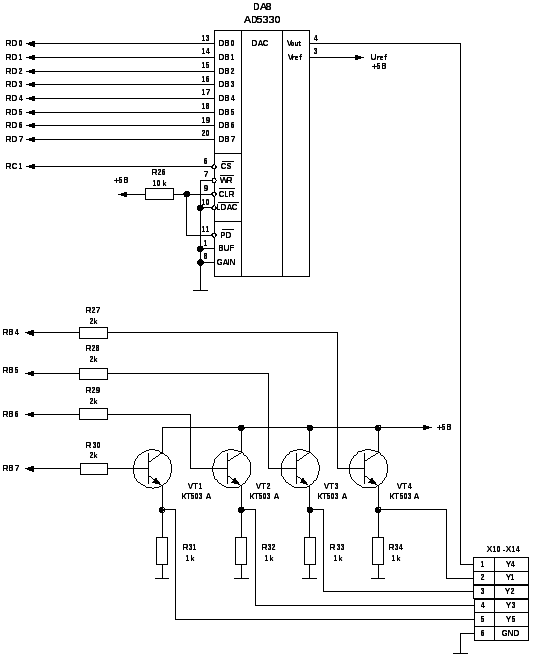
Рисунок 6 – Схема блока вывода управляющих сигналов
5 Разработка принципиальной схемы блока последовательного канала связи
В проектируемой системе управления для связи с внешним устройством используется последовательный интерфейс CAN. В качестве приемопередатчика используется микросхема MCP2551. Схема включения микросхем приведена на рисунке 7.

Рисунок 7 – Схема включения MCP2551
Микросхема MCP2551 – приёмопередатчик CAN. Он поддерживает скорость передачи данных до 1 Мбит/с и подходит для систем с напряжениями питания 12 В и 24 В. MCP2551 обеспечивает защиту от короткого замыкания до ±40 В и защиту от кратковременных напряжений до ±250 В.
Дополнительно, будучи совместим с ISO-11898-2, MCP2551 обеспечивает сброс при включении питания (power-on reset - POR) и защиту от кратковременного падения напряжения (brown-out protection), а также обнаружение постоянного доминанта (permanent dominant detection), чтобы гарантировать, что обесточенный или неисправный узел не будет мешать работе шины. Устройство реализует настраиваемую наклонную регулировку усиления (slope control) на выводах шины для уменьшения излучения радиопомех (RFI).
Передача - Контроллер протокола CAN выдаёт поток последовательных данных на логический вход TXD MCP2551. Соответствующее рецессивное или доминантное состояние выдаётся на выводы CANH и CANL. Приём - MCP2551 принимает доминантное или рецессивное состояния на те же выводы CANH и CANL, с которых осуществляется передача. Эти состояния выдаются в виде соответствующих логических уровней на вывод RXD, чтобы контроллер протокола CAN принял кадр CAN.
Режимы работы:
Существует три режима работы, которые управляются извне через вывод RS:
1) Высокоскоростной режим.
2) Режим наклонной регулировки усиления.
3) Режим ожидания (Standby)
Выберем высокоскоростной режим.
Высокоскоростной режим выбирается подключением вывода RS к Vss. В этом режиме выходные драйверы имеют быстрое время нарастания и спада, что поддерживает наивысшие скорости передачи до 1 Мбита/с и/или максимальную длину шины, обеспечивая минимальные циклические задержки приёмопередатчика.
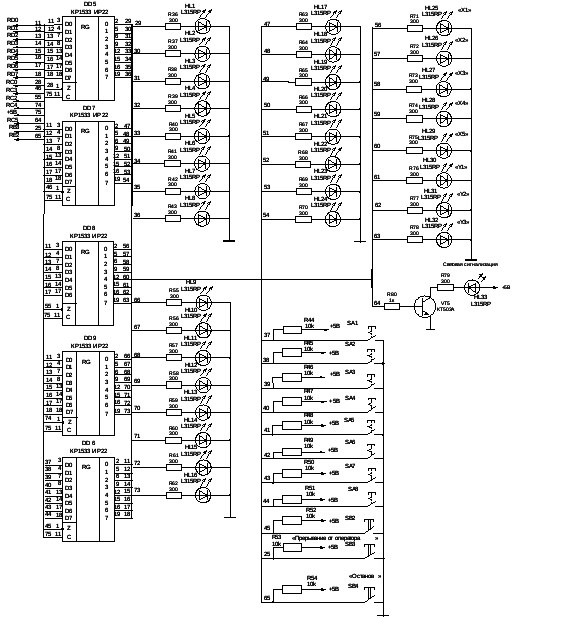
6 Разработка принципиальной схемы пульта управления
Пульт управления содержит восемь тумблеров для ввода 8-разрядного кода установки, кнопку «Enter» (служит для занесения в МК значения константы), тумблер «Останов» (служит для остановки программы), тумблер «Прерывание от оператора» (служит для выдачи на индикацию значений). Выводы пульта управления подключены к портам МК.
Для обеспечения выдачи на индикацию сигналов двоичных датчиков X1, X2, X3, X4, X5, X6, Y1-Y3, и цифрового кода N1, поступающего с АЦП, а также константы Q, хранящейся во внутренней памяти МК и значения Y4, применяются регистры DD8, DD5, DD7, DD9 соответственно, марки КР1533ИP22, которые обеспечивают хранение информации, поступающей для вывода на индикацию (рисунок 8). Светодиоды HL1-HL8 обеспечивают отображение цифрового кода N1, поступающего с АЦП. Светодиоды HL9-HL16 обеспечивают отображение значения Y4. Светодиоды HL17-HL24 обеспечивают отображение значения константы Q, хранящейся во внутренней памяти МК. Светодиоды HL25-HL32 обеспечивают отображение значений сигналов двоичных датчиков X1, X2, X3, X4, X5, X6, Y1-Y3.
Также на схеме изображено подключение световой сигнализации, которая осуществляется с помощью светодиода HL33.
Работа регистра марки КР1533ИР22 представлена в виде таблицы 1.
Таблица 1 – Режимы работы регистра КР1533ИР22
|
Входы |
Выходы Q0-Q7 |
Режимы работы | ||
|
Z |
C |
Dn | ||
|
L |
H |
H |
H |
защелкивание и считывание из регистра |
|
L |
H |
L |
L |
защелкивание и считывание из регистра |
|
L |
L |
x |
Q0 |
хранение |
|
H |
x |
x |
Z |
защелкивание в регистр, разрыв выходов |
Схема пульта управления представлена на рисунке 8.
 Рисунок
8 – Схема подключения пульта управления
Рисунок
8 – Схема подключения пульта управления