

2 Структурная схема микропроцессорной системы
Функциональная схема системы управления представлена на рисунке 2.
 Рисунок
2 – Функциональная схема системы
управления
Рисунок
2 – Функциональная схема системы
управления
Входными сигналами являются сигналы с цифровых датчиков X1, X2, X3, X4, X5, X6 и аналоговых датчиков V1-V2.
Выходными сигналами являются цифровые сигналы Y1-Y3, Y5 и аналоговый сигнал Y4.
В качестве микроконтроллера выбрана микросхема PIC16F877А. Он является центральным блоком системы управления. МК обрабатывает входные сигналы с цифровых датчиков, сигналы прерывания, вырабатывает двоичные управляющие сигналы, сигналы управления периферийными устройствами.
Блоки вывода цифровых и аналоговых сигналов предназначены для вывода сигналов на исполняемые механизмы.
Блок расширения ввода вывода служит для увеличения количества линий ввода-вывода. В состав данного блока входят буферные регистры.
Блок канала связи состоит из микросхемы приема – передатчика согласующего МК с интерфейсом CAN.
Микроконтроллеры семейства PIC имеют очень эффективную систему команд, состоящую всего из 35 инструкций. Все инструкции выполняются за один цикл, за исключением условных переходов и команд, изменяющих программный счетчик, которые выполняются за 2 цикла. Один цикл выполнения инструкции состоит из 4 периодов тактовой частоты. Каждая инструкция состоит из 14 бит, делящихся на код операции и операнд (возможна манипуляция с регистрами, ячейками памяти и непосредственными данными).
Высокая скорость выполнения команд в PIC-контроллерах достигается за счет использования двухшинной гарвардской архитектуры вместо традиционной одношинной Фон-Неймановской. Гарвардская архитектура основывается на наборе регистров с разделенными шинами и адресным пространством для команд и для данных. Набор регистров означает, что все программные объекты, такие как порты ввода/вывода, ячейки памяти и таймер, представляют собой физически реализованные аппаратные регистры.
3 Принципиальные схемы чтения информации с датчиков микропроцессорной системы управления объектом
3.1 Разработка схемы сопряжения для подключения цифровых датчиков мк
Схема сопряжения обеспечивает гальваническую развязку цифровых датчиков и микроконтроллера. Схема сопряжения представлена на рисунке 3.
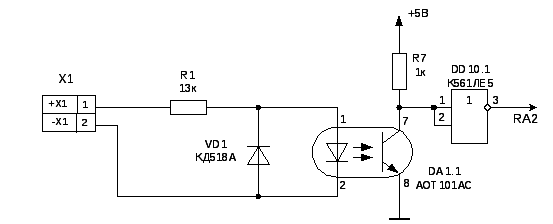
Рисунок 3 – Схема сопряжения для подключения цифрового датчика
Используется транзисторный оптрон с подключенным последовательно его светодиоду гасящим резистором и защитным диодом, включенным встречно параллельно светодиоду. Оптрон выполняет функцию гальванической развязки и ключевого элемента. Защитный диод исключает пробой светодиода оптрона обратным напряжением. Критерий выбора защитного диода оптрона следующий:
![]() (1)
(1)
где Uпрд – прямое падение напряжения на диоде;
![]() –максимально
допустимый прямой ток диода.
–максимально
допустимый прямой ток диода.
Для кремниевых
диодов Uпрд
= 0,7–1 В.
Используем диод KД518А,
![]() которого
равна 0,1 А .
которого
равна 0,1 А .
Рассчитаем сопротивление резистора R1:
![]() (2)
(2)
где Uвх – максимальное входное напряжение;
Uпр – прямое падение напряжения на светодиоде оптрона;
Iн – номинальный ток через светодиод;
В данной схеме используется оптрон АОТ101АС для которого Uпр = 1,6В и Iн = =5мА. Таким образом: R1 = (66-1.6)/0.005 = 13,0 кОм