

Специальные измерения / литература / Бойник - Диагн устр жд автомат и
.pdfзаранее известны нормативные значения всех схемных узлов и блоков, а также несложно их представление в виде многомерной функции. Однако при использовании частных алгоритмов экстраполяции требуется определение не только состояния систем, но и их классов, что является довольно непростой задачей. В то же время это позволит непосредственно оценивать категорию отказа и время его возможного возникновения с достаточно высокой вероятностью.
Известно, что любые временные процессы состояния устройств и систем носят случайный характер [26, 27]. Такие случайные процессы в большинстве случаев имеют несколько составляющих, изменения которых в отдельные периоды времени влияют на формальное описание процессов функционирования систем, являющееся основным при прогнозировании.
Изменение технического состояния устройств, как известно, происходит из-за старения и деградации, приводящих к неисправностям и отказам. По характеру протекания процессы деградацииподразделяютсянадвегруппы[62].
К первой группе относятся процессы, вызывающие внезапное или катастрофическое изменение технического состояния систем вследствие резкого изменения физических параметров элементов.
Ко второй группе относятся процессы, приводящие к постепенному изменению физических параметров элементов. Постепенные деградационные процессы параметров устройств с течением времени накапливаются, а затем вызывают прекращение работоспособности этих устройств.
В общем случае процесс изменения состояния систем можно представитьввиде:
→ |
→ |
→ |
→ |
→ |
|
|
X (t) = {H (t) ± ε H (t)} + {O(t) ± ε O (t)}, |
(4) |
|||||
→ |
|
|
составляющая, |
характеризующая |
||
где H( t ) – векторная |
|
|||||
необратимые процессы; |
|
|
|
|
|
|
→ |
|
|
составляющая, |
характеризующая |
||
O( t ) – векторная |
|
|||||
обратимые процессы;
41
ε→H ( t ) – векторная погрешность измерения составляющей, характеризующей необратимые процессы;
– векторная погрешность измерения составляющей,
характеризующей необратимые процессы.
Составляющая H( t ) в большей мере определяет детерминированную часть изменения состояния устройств и систем, а O( t ) характеризует его стохастическую часть.
Указанные составляющие в зависимости от периода года имеют сезонные колебания.
Если обозначить {H( t ) ± ε н( t )}= h и {O( t ) ± ε o ( t )}= q ,
то процесс изменения состояния элементов можно представить в виде:
→ |
→ |
→ |
(5) |
X ( t ) = h( t ) + q( t ) . |
|||
Если | h(t+ t) − h(t)| >> | q(t+ t) − q(t)|, то в этом случае
наблюдается процесс постепенного изменения технического состояния СЖА.
При этом очевидно, что чем больше указанное
→
неравенство, тем ближе процесс изменения X ( t ) приближается
к детерминированному, характеризующему постепенные отказы. Деградационные процессы в системах могут быть самыми
разнообразными и, прежде всего, детерминированными. Детерминированными считаются процессы, у которых
математическое ожидание M [q( t )]= 0 . В этом случае,
очевидно, значительно облегчается прогнозирование состояния систем и возможно получение результатов прогноза с большой точностью.
Несмотря на принципиальное отличие решения задачи прогнозирования с помощью рассмотренных алгоритмов экстраполяции и статической классификации, они имеют общие процедуры процесса прогнозирования. Эта общие процедуры можно представить в виде трех этапов: ретроспектирование,
диагностирование и прогнозирование.
42
Рассматривая только этап прогнозирования, следует отметить, что выбор его методов и алгоритмов зависит от множества факторов, которые сведены в табл. 1.
Таблица 1. Обобщенная характеристика факторов этапа прогнозирования
Фактор |
Этапы |
Характеристика |
|
|
Период |
Эксплуатация |
|
Объект |
Использование |
Многократное |
|
Вид контроля |
Периодический, |
||
|
|||
|
|
непрерывный |
|
|
Характер |
Монотонный и |
|
|
протекания |
дискретный |
|
Процесс |
Оценка |
Многомерная |
|
Характер |
Линейный и нелинейный |
||
|
|||
|
нестационарности |
|
|
|
Вид процесса |
В основном Гауссовский |
|
|
Текущий объем |
Ограниченный и |
|
|
Характер |
достаточный |
|
Информация |
Периодический и |
||
поступления |
непрерывный |
||
|
Априорность |
Имеется |
|
|
Вид |
Закодированная |
|
|
Характер |
Линейный и нелинейный |
|
|
коэффициентов |
|
|
Модель |
Закон |
Известен |
|
распределения |
|
||
|
|
||
|
классов состояний |
|
|
|
Вид |
Интерполяционный |
|
|
Вид |
Экстраполяция или |
|
|
|
статистическая |
|
Прогноз |
Срок |
классификация |
|
Краткосрочный, |
|||
|
|||
|
Способ |
долгосрочный |
|
|
Прямой и обратный |
43
Каждый из приведенных выше факторов, очевидно, по разному влияет на выбор алгоритмов прогнозирования и при практическом их выборе всегда требуется детальная проработка,
ав ряде случаев и дополнение.
Вто же время любые временные процессы эксплуатации СЖА, как известно, являются случайными и их количественно можно представить в виде временного ряда. Такие случайные процессы в большинстве случаев имеют несколько составляющих, изменение которых в отдельные периоды времени (закон распределения, стационарность и др.) принципиально влияют на формальное описание процессов эксплуатации, без которого невозможно прогнозирование.
Изменения технического состояния устройств и систем представляют собой явления старения и деградации, приводящие к неисправностям и отказам. Основными причинами этих явлений являются:
•конструктивные – несовершенство конструкции;
•проектные – недостаточное согласование узлов и элементов;
•технологические – нарушение технологии обслуживания;
•эксплуатационные – старение, износ и нарушение правил
эксплуатации; По характеру протекания процессов деградации их можно
разделить на две группы.
К первой группе относятся процессы, вызывающие внезапное или катастрофическое изменение технического состояния устройств и систем вследствие резкого изменения физических параметров. В результате наступает неисправность или отказ устройств по причине резкого скачкообразного изменения их характеристик за пределы допустимых. Ко второй - процессы, приводящие к постепенному изменению физических параметров устройств и систем.
Постепенные деградационные процессы параметров устройств с течением времени накапливаются и приводят к потере их работоспособности.
В общем случае процесс изменения состояния устройств и систем можно представить в виде:
44

X ( t )=ξ ( t ) + ηr( t ) + εr( t ) , |
(6) |
где ξr(t) , η (t) – векторные составляющие, характеризующие соответственно необратимые и обратимые процессы;
ε (t) – векторная погрешность измерительных цепей.
Составляющая ξ (t) определяет закономерность изменения процесса и в большей мере детерминированную его часть, а η (t) и ε (t) характеризуют его стохастическую часть.
Последние |
составляющие в |
большинстве случаев |
имеют |
«сезонные» колебания. |
|
|
|
Для простоты описания составляющие η (t) и ε (t) |
можно |
||
объединить |
ηr(t) + εr(t) = k (t) . |
Тогда процесс состояния |
|
устройств и систем можно представить в виде
X (t)=ξ (t) + k (t) .
Процессом постепенного изменения технического состояния устройств и систем можно, в общем случае, считать процесс, у которого выполняются следующие условия

 ξ (t + t) − ξ (t)
ξ (t + t) − ξ (t)
 »
» 
 k(t + t) − k(t)
k(t + t) − k(t)
 ,
,
где 
 ξ (t + t) − ξ (t)
ξ (t + t) − ξ (t)
 и
и 
 k(t + t) − k(t)
k(t + t) − k(t)
 - норма вектора;
- норма вектора;
t > 0 - период времени.
Очевидно, что чем больше указанное неравенство, тем ближе процесс изменения X (t) приближается к детерминированному, характеризующему постоянные отказы.
Если математическое ожидание составляющей k(t)
приравнять нулю, т.е. M [k (t )]= 0 , то можно |
записать |
||||||||
соотношение, которое является неравенством |
Коши – |
||||||||
Буняковского: |
|
||||||||
|
|
|
|
ξ (t + t) − ξ (t) |
|
|
|
» D[X (t + t)] D[X (t)] » |
|
|
|
|
|
|
|||||
|
|
|
|
» cov |
|
|
[X (t + t) + X (t)], |
|
|
45
где D - дисперсия процесса состояния устройств и систем X (t)
и X (t + t) ;
cov – оператор ковариационного момента. Деградационные процессы могут быть самыми
разнообразными и прежде всего детерминированными и стохастическими.
Детерминированными считаются процессы, у которых выполняются известные условия:
X (t)=ξ (t) + k (t) и M [k (t)]= 0 .
В таком случае облегчается получение прогноза с большой точностью.
Стохастические процессы классифицируются по области определения:
•функций – вещественные, комплексные;
•по характеру изменения времени – дискретные, непрерывные;
•по виду дисперсии – монотонные, флуктуационные;
•по виду приращений – стационарные, марковские и ортогональные (независимые);
•по закону распределения в сечениях функций – гауссовские, вейбулловские и др.
Наиболее характерными моделями детерминированных процессов являются следующие [51, 69, 75]:
1. В случае индивидуальной реализации детерминированных процессов используется общая модель вида:
X (t) = W {β (x),t}+ ε (t) ,
где W {β (x),t} – модель необратимой составляющей, известной
с точностью до коэффициентов |
β ρ = [β |
0 |
, β ,..., β |
μ |
] |
и ρ - знак |
|
|
1 |
|
|
||
транспортирования; |
|
|
|
|
|
|
ε (t) = ε1(t) + ε 2 (t) – случайная величина, |
|
связанная с |
||||
ошибками обратной составляющей и точностью измерительных цепей.
46

Эта модель наиболее эффективна в случаях, когда известны физические параметры изменения элементов и ошибки случайной величины .
2. Если детерминированный процесс представлен группой одномерных реализаций, то для его описания наиболее часто применяется модель вида:
X (t) = W {β (x),t}+ V {α (ε ),t},
где V {α (ε ),t} - модель обратимой составляющей, известной до коэффициентов α = (α0 ,α1,...,α n ).
Эта модель является наиболее полной для одномерных взаимосвязанных групповых процессов изменения состояния устройств и систем.
3. Рассмотренные выше модели могут быть применены и для многомерных случаев, и тогда, когда индивидуальный многомерный детерминированный процесс может быть представлен моделью:
X (t) = W{β (x),t}+ E ,
где X = |
|
x1...xn |
|
|
|
|
- |
вектор |
показателей |
контролируемого |
||||||||||
|
|
|
||||||||||||||||||
процесса; |
|
|
|
|
|
|
|
|
|
|
|
|
|
Wr{β (1) ,t},...,Wr{β (k ) ,t} |
|
|
|
|
||
Wr{β (x),t}= |
|
|
|
|
|
- |
вектор функций |
|||||||||||||
|
|
|
||||||||||||||||||
времени t и коэффициентов β; |
|
|
|
|
|
|||||||||||||||
E = |
|
ε1...ε k |
|
|
|
|
- |
вектор |
ошибок, |
|
возникающих из-за |
|||||||||
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
существования случайной составляющей.
Эта модель является наиболее общей и поэтому наиболее часто используется при прогнозировании сложных ответственных устройств и систем.
Таким образом, выбор оптимальных алгоритмов прогнозирования зависит от теоретического обоснования возможных состояний устройств и систем железнодорожной автоматики с учетом всегомногообразияфакторов.
47
48
7 |
Анализ эксплуатируемых и |
|
|
|
перспективных систем диспетчерского |
|
контроля |
7.1Характеристика и принципы построения эксплуатируемых систем диспетчерского контроля
В1950-е годы резкое увеличение интенсивности движения скоростных и тяжеловесных поездов потребовало пересмотра оперативности диспетчерского руководства работой железнодорожных участков. Для принятия своевременных мер по безусловному выполнению установленных графиков движения поездным диспетчерам в то время потребовалась достоверная информация о месте нахождения всех поездов на участке, показаниях входных и выходных светофоров станций, а также состоянии их путей. Такая информация от систем АБ, ЭЦ, АПС могла быть передана поездному диспетчеру только автоматическими устройствами. Учитывая это, а также необходимость автоматизации контроля состояния отдельных элементов перегонных систем, была начата разработка специальных систем ДК. В разработке таких систем было несколько этапов, которые в основном были связаны с повышением их быстродействия и увеличением количества объектов контроля.
Впервые система ДК (типа ДК-ЦНИИ-49) за движением поездов была внедрена в 1949 г. на Московской железной дороге, и затем в 1951 г. - на других дорогах [56].
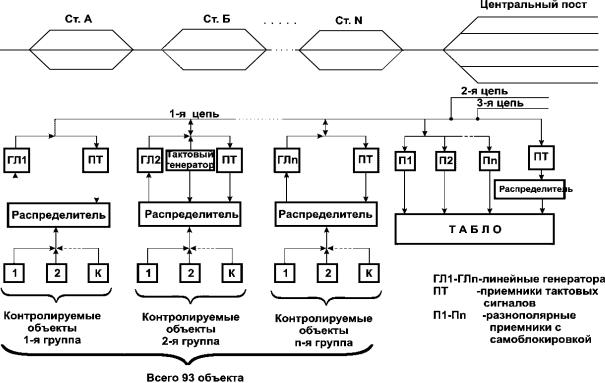
Вэтой системе был использован циклический метод контроля объектов, при котором проверка состояния контролируемых объектов (путевых и сигнальных реле), а также передача необходимой информации на центральный пост (ЦП) производилась последовательно в течение определённого промежутка времени, называемого циклом проверки (рис. 4). Каждый контролируемый объект для передачи информации о своем состоянии в цикле проверки на короткое время получал связь через линейный генератор (ЛГ) с ЦП. Такое последовательное соединение контролируемых объектов с ЦП осуществлялось специальной релейной цепочкой.
49
50
Рисунок 4 - Структурная схема передачи информации в системах ДК ЦНИИ-49 и БДК-ЦНИИ-57