

Специальные измерения / литература / Бойник - Диагн устр жд автомат и
.pdfМикропроцессор модуля МОДС88 в процессе выполнения основного программного цикла производит опрос состояния входных цепей от ДПК и РЦН. Он ожидает команды от модуля ММК, а также обеспечивает информационный обмен по ЛСК между модулем ММК и контроллерами внешних ПКПС. Линии ввода–вывода микропроцессора защищены от перенапряжений вторым контуром гальванической развязки.
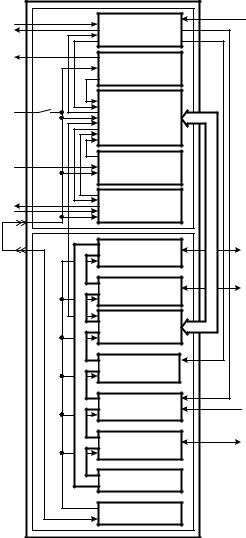
Вариант подключения ПКПС к блоку ПК через ЛСК приведен на рис. 59.
Блок-Б |
|
Подсистема- |
|
Подсистема- |
|
Подсистема- |
||||||
|
1 |
|
2 |
|
|
|
N |
|||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 59 - Подключение ПКПС методом «точка–точка»
Модуль микроконтроллера ММК через системную шину осуществляет:
•ввод информации и управление каналами АЦП модулей МОТС;
•ввод информации и команд от модуля МОДС88;
•вывод команд управления напольным оборудованием в модуль МОДС88;
•обмен информацией по последовательной линии с системой автоматической идентификации подвижных единиц (через модуль УПСТ);
•прием и передачу данных в линию (канал) связи (через модуль УПСЧ);
•обмен символьной информацией по последовательной линии с видеотерминалом (через модуль УПСТ);
•управление порогом срабатывания формирователя сигнала РЦН модуля МФРЦ.
Питание модулей узла МК обеспечивается модулем ВИП. В исходном состоянии (поезда на участке контроля нет) с выхода РЦН на вход формирователя модуля МФРЦ поступает потенциал, который преобразуется в дискретный сигнал и через УГР поступает на вход микропроцессора модуля МОДС88.
231
Микропроцессоры модулей ММК, МОДС88 и МГР выполняют основные программные циклы.
Модуль ММК в процессе выполнения основного программного цикла осуществляет диагностику всех составных частей блока, обеспечивает информационный обмен по линии (каналу) связи с оконечным оборудованием данных (КИ) и по ЛСК с ПКПС, а также принимает команды от видеотерминала и модуля МОДС88.
При заходе поезда на участок контроля (вступление поезда на РЦН) потенциал на выходе РЦН понижается (приблизительно до 0,7В), что фиксируется формирователем модуля МФРЦ, считывающим дискретный сигнал с входа микропроцессора модуля МОДС88. Микропроцессор модуля МОДС88 выдает сигналы на выходные дискретные цепи управления и переходит в режим счета осей и вагонов, а также выдает модулю ММК команды на переход в режим контроля поезда. Модуль ММК, получив команду, формирует и передаёт по линии связи данные о заходе поезда.
В процессе прохода поезда по участку контроля сигналы от ДПК поступают на входы формирователей модуля МФДО, преобразуются в дискретные сигналы и через УГР поступают на входы микропроцессора модуля МОДС88. По сигналам от ДПК микропроцессор модуля МОДС88 формирует и выдает модулю ММК команды на начало и окончание обработки тепловых сигналов, тип, порядковый номер, скорость движения каждой подвижной единицы. Кроме того, при сбоях в счёте осей (ложный сигнал или потеря сигнала от ДПК) микропроцессор модуля МОДС88 исправляет ошибки (если сбой не носит глобальный характер) и устанавливает признак сбоя в командах, передаваемых модулю ММК, на те подвижные единицы, при проходе которых был зафиксирован сбой. Модуль ММК по командам начала и окончания обработки тепловых сигналов, поступающих от модуля МОДС88, осуществляет считывание значений тепловых сигналов из модулей МОТС, обрабатывает и передает полученные данные в линию связи и выводит результаты контроля на видеотерминал.
После прохода поездом участка контроля (освобождение РЦН) микропроцессор модуля МОДС88 передает модулю ММК
232
команду о начале контрольной программы, данные о количестве осей и вагонов в проконтролированном поезде, а также производит проверку напольного оборудования путем имитации прохода контрольного вагона. По окончании имитации микропроцессор модуля МОДС88 передает модулю ММК команду об окончании контрольной программы и переходит в режим выполнения основного программного цикла. Модуль ММК по результатам контрольной программы формирует и передаёт по линии связи данные о поезде и результаты, полученные при выполнении контрольной программы.
10.4.3 Контроллер периферийный ПК-02 – вариант «Д»
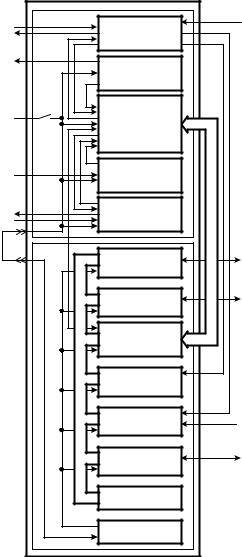
Отличие блока ПК варианта «Д» от варианта «Б» заключается в том, что в варианте «Д» установлены дополнительные модули МИП–Д и МРУ (рис. 60).
Модуль МИП–Д обеспечивает питание предварительных усилителей и болометров напольных камер ДИСК–Б, дополнительное усиление и инвертирование сигнала ИКИ.
Модуль МРУ обеспечивает согласование цепей блока с напольным и силовым оборудованием аппаратуры ДИСК–Б, а также гальваническую развязку цепей управления (первый контур гальванической развязки).
В исходном состоянии (поезда на участке контроля нет, РЦН свободна) микропроцессор модуля МГР выполняет программный цикл проверки и диагностики. В цикле диагностики через УГР проверяется наличие выходных напряжений источников питания модуля МИП–Д и напряжения питания на электромагнитах заслонок напольных камер. Питание электромагнитов заслонок осуществляется от источника, расположенного в силовом отсеке аппаратуры ДИСК–Б.
При заходе поезда на участок контроля модуль МОДС88 выдает на дискретные линии сигналы управления заслонками (длительность сигнала - около 2 с), которые через УГР поступают в модуль МРУ на ключи, управляющие исполнительными устройствами открытия заслонок силового отсека перегонной стойки аппаратуры ДИСК–Б.
233
|
СУ |
|
|
Датчик |
К напольному |
МРУ |
|
температуры |
|
и постовому |
|
|
наружного |
|
оборудованию |
|
|
|
воздуха |
ДИСК-Б |
|
МИП-Д |
|
|
|
|
|
|
|
~ 220 В 50 Гц |
S1 |
|
|
|
|
МГР |
|
|
|
|
|
|
|
|
Датчики |
|
МФДО |
вывода |
|
счета осей |
|
|
||
|
|
|
||
|
|
ввода- |
|
|
РЦ |
|
МФРЦ |
|
|
наложения |
|
|
||
|
|
линии |
|
|
|
МК |
|
|
|
|
УПСТ |
Дискретные |
Видеотерминал |
|
|
|
|||
|
|
|
Система |
|
|
|
УПСТ |
автоматической |
|
|
|
идентификации |
||
|
|
|
||
|
|
|
подвижных |
|
|
шина |
|
|
|
|
МОДС88 |
|
единиц |
|
|
|
|
||
|
|
|
|
|
|
Системная |
МОТС |
|
|
|
(вспомог. тракт) |
|
|
|
|
МОТС |
|
Нижний габарит, |
|
|
|
|
||
|
|
(основной тракт) |
|
охрана, фидеры |
|
|
УПСЧ |
|
Линия (канал) |
|
|
|
связи |
|
|
|
|
|
|
|
|
ММК |
|
|
|
|
ВИП |
|
|
Рисунок 60 - Структурная схема блока ПК – вариант «Д» |
||||
При проходе поезда по участку контроля тепловые сигналы положительной полярности от буксовых узлов и элементов подвижного состава с выходов предварительных
234
усилителей основных и вспомогательных напольных камер поступают на инвертирующие усилители, размещённые в модуле МИП–Д. С выхода усилителей модуля МИП–Д тепловые сигналы отрицательной полярности поступают на регуляторы уровня тепловых сигналов модуля МРУ и далее на входы модулей МОТС основного и вспомогательного трактов.
После освобождения поездом РЦН микропроцессор модуля МОДС88 формирует контрольную программу, кратковременно включает лампы автоконтроля основных напольных камер и через ЛСК передаёт команды управления лампами вспомогательных напольных камер микропроцессору модуля МГР. Сигналы управления лампами основных напольных камер с выходов микропроцессора модуля МОДС88 и лампами вспомогательных напольных камер с выходов микропроцессора модуля МГР через УГР подаются на управляемые стабилизаторы тока, расположенные в модуле МРУ. Микропроцессор модуля МОДС88 формирует сигналы управления лампами автоконтроля только при закрытых заслонках. Если от датчика положения заслонки напольной камеры поступает сигнал открытого положения, то сигнал управления лампой данной напольной камеры не формируется.
Стабилизаторы тока обеспечивают протекание стабильного тока через лампу автоконтроля на период установленного сигнала управления лампами. Питание ламп автоконтроля через стабилизаторы тока осуществляется от источника питания электромагнитов заслонок, расположенного в силовом отсеке стойки ДИСК–Б.
Сигналы контроля положения заслонок с датчиков положения через УГР подаются от основных напольных камер - на входы микропроцессора модуля МОДС88, от вспомогательных напольных камер - на входы микропроцессора модуля МГР.
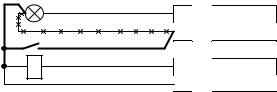
Напольные камеры аппаратуры ДИСК–Б не оборудованы датчиками положения заслонок. Для обеспечения контроля положения заслонок на период прохода поезда по участку контроля требуется ввод датчика положения заслонки в схему напольной камеры (рис. 61, на котором дополнительный монтаж показан утолщёнными линиями). Датчик обеспечивает замкнутое положение контакта К при открытой заслонке.
235
Л |
10 10 |
Лампа |
|
|
|||
К |
4 |
4 |
КЗ |
|
|
|
|
ЭМ |
8 |
8 |
Заслонка |
|
|||
|
12 12 |
Общий |
|
Рисунок 61 - Схема контроля положения заслонки напольной камеры
Амплитуда тепловых сигналов на входах модулей МОТС основного и вспомогательного трактов устанавливается регуляторами уровня тепловых сигналов модуля МРУ в соответствии с технической документацией на комплекс, в составе которого используется блок ПК.
10.4.4 Контроллер периферийный ПК-02 – вариант «П»
Отличие блока ПК варианта «П» от варианта «Б» заключается в том, что в варианте «П» установлены дополнительные модули МИП–П и МРУ (рис. 62). Модуль МИП–П обеспечивает питание предварительных усилителей и болометров напольных камер ПОНАБ–3.
В исходном состоянии (поезда на участке контроля нет, РЦН свободна) микропроцессор модуля МГР выполняет программный цикл проверки и диагностики. В цикле диагностики через УГР проверяется наличие выходных напряжений источников питания модуля МИП–П и наличие напряжения питания электромагнитов заслонок от источника питания, расположенного в силовом щите аппаратуры ПОНАБ–3.
При заходе поезда на участок контроля модуль МОДС88 выдает сигнал управления заслонками, который через УГР поступает в модуль МРУ на ключ, управляющий исполнительным устройством открытия заслонок силового щита аппаратуры ПОНАБ–3.
При проходе поезда по участку контроля тепловые сигналы от буксовых узлов и элементов подвижного состава с выходов предварительных усилителей напольных камер в виде сигналов отрицательной полярности через модуль МИП–П поступают на регуляторы уровня тепловых сигналов модуля МРУ и далее - на входы модуля МОТС основного тракта.
236
К напольному |
СУ |
|
|
Датчик |
МРУ |
|
температуры |
||
и постовому |
|
|
||
|
|
наружного |
||
оборудованию |
|
|
|
|
|
|
|
воздуха |
|
ПОНАБ-3 |
|
|
|
|
|
МИП-П |
|
|
|
|
|
|
|
|
~ 220 В 50 Гц |
S1 |
|
|
|
|
МГР |
|
|
|
|
|
|
|
|
Датчики |
|
МФДО |
-вывода |
|
счета осей |
|
|
||
РЦ |
|
МФРЦ |
ввода |
|
наложения |
|
|
||
|
|
линии |
|
|
|
МК |
|
Видеотерминал |
|
|
УПСТ |
Дискретные |
||
|
|
|||
|
|
УПСТ |
Система |
|
|
|
автоматической |
||
|
|
|
идентификации |
|
|
шина |
|
|
|
|
МОДС88 |
|
подвижных |
|
|
|
единиц |
||
|
Системная |
МОТС |
|
|
|
(вспомог. тракт) |
|
|
|
|
МОТС |
|
Нижний габарит, |
|
|
|
|
||
|
|
(основной тракт) |
|
охрана, фидеры |
|
|
УПСЧ |
|
Линия |
|
|
|
(канал) связи |
|
|
|
|
|
|
|
|
ММК |
|
|
|
|
ВИП |
|
|
Рисунок 62 - Структурная схема блока ПК – вариант «П» |
||||
237
После освобождения поездом РЦН микропроцессор модуля МОДС88 формирует контрольную программу, кратковременно включает лампы автоконтроля напольных камер. Сигналы управления лампами напольных камер с выходов микропроцессора модуля МОДС88 через УГР подаются на управляемые стабилизаторы тока, расположенные в модуле МРУ.
Микропроцессор модуля МОДС88 формирует сигналы управления лампами автоконтроля только при закрытых заслонках. Если от датчика положения заслонки напольной камеры поступает сигнал открытого положения, то сигнал управления лампой данной напольной камеры не формируется.
Стабилизаторы тока обеспечивают протекание стабильного тока через лампу автоконтроля на период установленного сигнала управления лампами. Питание ламп автоконтроля через стабилизаторы тока осуществляется от источника питания электромагнитов заслонок, расположенного в силовом щите аппаратуры ПОНАБ–3.
Сигналы контроля положения заслонки с датчиков положения через УГР подаются на входы микропроцессора модуля МОДС88.
Амплитуда тепловых сигналов на входах модуля МОТС основного тракта устанавливается регуляторами уровня тепловых сигналов модуля МРУ в соответствии с технической документацией на комплекс, в составе которого используется блок ПК.
238

11Автоматизированная система диспетчерского контроля устройств железнодорожной автоматики - АСДК
11.1 Состав и структура оборудования
В состав технических средств автоматизированной системы диспетчерского контроля устройств железнодорожной автоматики (АСДК) линейного пункта (ЛП) входят (рис. 63):
Каналы информационной связи СПД
Концентратор  информации
информации 
КИ-6М
Периферийный |
|
Концентратор |
|
Периферийный |
контроллер |
|
информации |
|
контроллер |
ПК-01 |
|
КИ-6М |
|
ПК-01 |
|
|
|
|
|
|
от |
|
|
УДВ- |
УДВ- |
приемников |
|
||||
|
ЧДК |
контактов |
|
16 |
16 |
МС |
реле |
|
|||
|
УДВ- |
УДВ- |
|||
|
|
|
|||
|
|
|
|
||
|
|
|
|
16 |
16 |
от контактов |
|
от |
|
УДВ- |
УДВ- |
реле |
|
|
|
16 |
16 |
|
|
|
от |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
приемников |
|
Кабель |
|
|
||||||
|
ЧДК |
|
|
|
||||||
|
|
|
|
|||||||
|
сигнальный |
|
||||||||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
Стойка Стойка приемная станционная ПОНАБ-3 ДИСК-Б
Рисунок 63 - Структура оборудования АСДК линейного пункта.
•концентратор информации КИ-6М, включенный в СПД участка контроля;
239
•один или более периферийных контроллеров ПК-01 для сбора информации о состоянии устройств СЦБ на станции и прилегающих к ней перегонах;
•модули сопряжения (МС) или устройства дискретного ввода и передачи данных УДВ-16 (УДВ) для подключения к контактам реле или блоков ЭЦ по потребности;
•при наличии на станции приемных комплектов аппаратуры обнаружения перегретых букс (ПОНАБ, ДИСК) - один периферийный контроллер ПК-01 для сбора информации о проконтролированных поездах на каждые 4 (или менее) приемных комплекта.
КИ может обслуживать до 6 каналов информационной связи. Два канала, как правило, используются для подключения КИ к СПД, остальные 4 канала используются для подключения ПК.
Подключение ПК к КИ и КИ к каналам информационной связи может осуществляться как по 2-х, так и по 4-х проводной схеме в зависимости от местных условий.
Съем информации с контактов реле станционных систем ЭЦ может производиться следующими способами:
•непосредственно от свободного тройника реле к модулю дискретного ввода МДВ ПК;
•от свободного тройника с запитанным общим контактом (полюс СПБ) через МС, обеспечивающий гальваническую развязку, к МДВ ПК;
•от свободного тройника с запитанным общим контактом (полюс СПБ) через УДВ, обеспечивающее гальваническую развязку, к модулю УПСТ КИ.
Периферийный контроллер ПК-01 включает в себя четыре МДВ и один модуль обработки сигналов ЧДК (МОДС-16). Один МДВ позволяет непосредственно или через МС подключить на ввод 48 сигнальных цепей (контактов). Модуль МОДС-16 позволяет подключить 16 контактов приемника ЧДК.
240