

pidruchnik
.pdfрадіальна сила на шестірні дорівнює осьовій силі на колесі:
Fr1 = Fa2 = Ft tgα cosδ1, |
(2.78) |
осьова сила на шестірні дорівнює радіальній силі на колесі: |
|
Fa1 = Fr2 = Ft tgα cosδ2. |
(2.79) |
Рис. 2.17. Сили в зачепленні конічної передачі
Еквівалентне колесо
Форма зубця конічного колеса в нормальному перерізі додат ковим конусом така ж, як і в зубця циліндричного прямозубого ко леса, тому для розрахунків конічного колеса використовують роз міри еквівалентного йому прямозубого циліндричного, одержано го розгорткою додаткового конуса (рис. 2.15). Діаметр еквівалентно го колеса:
dv = d cosδ ; |
(2.80) |
zv ma = z mz cosδ ; |
(2.81) |
еквівалентне число зубців (число зубців еквівалентного колеса):
zv = z cosδ . |
(2.82) |
131
Розрахунки прямозубих конічних передач
Розрахунок на контактну витривалість зубців
Розрахунок ведеться як розрахунок прямозубої циліндричної передачі з еквівалентними зубчастими колесами в середньому пе рерізі.
Вихідною є формула Герца:
σH = ZM |
qm |
|
|
2ρ . |
|||
|
|||
|
зв |
||
Зведений радіус кривини робочих поверхонь у середньому перерізі:
1 |
|
1 |
|
1 |
|
2 |
cosδ1 |
|
2 |
cosδ2 |
|
|
2 |
|
|
cosδ2 |
|
|
||||
|
|
= |
|
+ |
|
|
= |
|
|
|
+ |
|
|
|
= |
|
|
cosδ1 |
+ |
|
|
; |
ρ |
|
ρ |
ρ |
|
d |
|
sin α |
d |
|
sin α |
d |
sin α |
u |
|||||||||
пр |
|
|
2 |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
1 |
|
|
|
|
m1 |
|
|
m1 |
|
|
m1 |
|
|
|
|
|
||||
враховуючи те, що:
cosδ2 =
одержимо:
1 |
|
= |
|
|
1 |
|
; cosδ1 |
= |
|
|
|
1 |
= |
u |
; |
||||
tg2δ |
2 +1 |
|
u2 +1 |
|
|
tg 2δ1 +1 |
u2 +1 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
1 |
|
|
|
|
2 |
|
u |
2 |
+1 |
|
|
|
|
|||||
|
|
= |
|
|
|
|
|
|
|
|
|
(2.83) |
|||||||
|
|
ρ |
|
|
d |
|
sinα |
|
|
u |
|
|
|
||||||
|
|
зв |
|
m1 |
|
|
|
. |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Питоме розрахункове навантаження в середньому перерізі:
qm = (qmax + qmin)/2 = Ft∙KHV ∙KHβ /(0,85∙b∙cosα∙εα), |
(2.84) |
де коефіцієнт 0,85 враховує зниження несучої здатності пря мозубої конічної передачі порівняно з циліндричною.
Формула перевірного розрахунку прямозубої конічної передачі на контактну витривалість зубців:
132
σ = Z Z Z |
Ft KHβ KHV |
|
u2 +1 |
≤[σ] |
. |
(2.85) |
|||||||
|
u |
|
|||||||||||
H |
M |
|
H |
|
ε |
0,85 b dm |
H |
||||||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
Під час проектного розрахунку визначають або зовнішній діа |
|||||||||||||
метр колеса de2 , або середній діаметр шестерні dm1. |
|
|
|
||||||||||
Замінивши Ft = |
2T2 |
= |
2T1 |
; b = Kbe Re , |
|
|
|
|
|
||||
|
|
|
|
|
|
||||||||
|
d |
m2 |
|
d |
m1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
одержимо розрахункове значення зовнішнього діаметра колеса:
de2 =1000 3 |
T2 KHβ u |
|
|
|
|
0,85 [σ]2 |
K (1−K ) |
(мм), |
(2.86) |
||
|
H |
be |
be |
|
|
при цьому Т2 в Н∙м; [σ]H МПа,
для редукторів рекомендують розраховане значення de2 заок руглити до найближчого із стандартного ряду;
середній діаметр шестірні:
|
|
= 770 3 |
T K |
Hβ |
u2 |
+1 (2 − K |
be |
) |
||||
d |
|
1 |
|
|
|
|
|
|
|
|||
m1 |
0,85 K |
|
u |
2 |
2 |
|
. |
|||||
|
|
|
be |
|
[σ] |
|
|
|
||||
|
|
|
|
|
|
|
|
H |
|
|
|
|
Розрахунок прямозубої конічної передачі на витривалість у разі згину
Перевірка зубців конічної передачі на витривалість у разі згину аналогічна перевірці зубців циліндричної:
σ |
F |
= Y |
|
Ft KFβ KFV |
≤ [σ] |
(2.87) |
|
||||||
|
F |
|
|
F , |
||
|
|
|
|
0,85 b mm |
|
|
де YF – коефіцієнт форми зубців, який залежить від еквівален тного числа зубців (2.82).
133
Під час проектного розрахунку, зазвичай, визначають середній модуль, через нього зовнішній модуль, значення якого рекоменду ється заокруглювати до найближчого стандартного:
mm = 3 |
2T1 KFβ (2 − Kbe ) |
|
||||
0,85 K |
be |
u z2 |
[σ] |
. |
(2.88) |
|
|
|
1 |
F |
|
||
Розрахунки конічних передач на міцність у разі дії максима льних навантажень виконують як і для циліндричних передач.
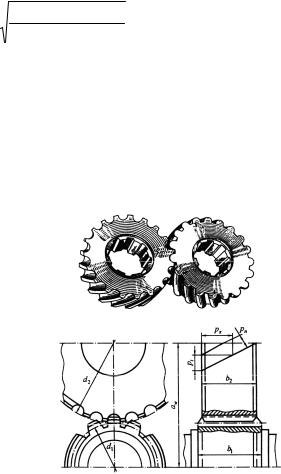
2.2.11. Циліндричні передачі з зачепленням Новикова
У 1954 році М.Л. Новіков запропонував нове зачеплення з підви щеною несучою здатністю (рис. 2.18). В зубчастій передачі Новикова профіль зубця являє собою циліндричнуповерхню.
Переваги зубчастих пе редач із зачепленням Нові кова: початковий контакт зубців в точці перемі щується уздовж зубця з по стійною швидкістю, кут тиску також постійний; біль ший зведений радіус криви ни разі дотику колових поверхонь і збільшення швидкості кочення профілів уздовж зубця сприяє утво ренню мастильного прошар ку, що підвищує навантажу вальну здатність у 1,3…1,5 рази порівняно з косозубою евольвентною циліндрич
ною передачею.
Недоліком передачі Но Рис. 2.18. Циліндрична передача
вікова є велика чутливість до зміни міжосьової відстані, яка викликає зменшення ділянки контакту, тому виникає потреба більш

жорстких допусків на виготовлення коліс, міжосьову відстань та більш жорстких валів і їх опор.
Зубчаста передача Новикова буває двох типів: з однією лінією зачеплення або з двома.
Упередачах з однією лінією зачеплення профілі різні, у шес тірні – опуклий, у колеса увігнутий (рис. 2.18б). Недолік таких пе редач – складніша технологія виготовлення.
Упередачах з двома лініями зачеплення профілі зубців коліс однакові. Під навантаженням одночасно виникають дві ділянки ко нтакту, але на різних зубцях. Навантаження розподіляється між двома зубцями, що підвищує навантажувальну здатність передачі.
Перевірний розрахунок на контактну витривалість ведеться за формулою Герца:
σH = 3750 |
T1 z11,5 KHβ KHV Kβu |
≤ [σ]H , |
(2.89) |
|
|||
|
d1 Kε |
|
|
де T1 – момент на шестірні; d1 і z1 – ділильний діаметр і число зубців шестірні; Kε – коефіцієнт, що враховує осьове перекриття (Кε = 2; 4; 6); Kβu – коефіцієнт урахування кута нахилу β і передаточного числа u:
Kβu = [(u +1)/ u cos3 β]0,5 tgβ ; |
(2.90) |
KHβ – коефіцієнт концентрації напруження, приблизно визна чається, як для евольвентної передачі; KHV – коефіцієнт урахування динамічного навантаження, який залежить від ступеня точності ви готовлення і швидкості обертання передачі; [σ]H – допустимі конта ктні напруження, визначають за формулами для евольвентної пе редачі.
Під час проектного розрахунку визначають діаметр ділильного кола шестірні з формули (11.77), а послідовність значень z1 згідно з рекомендованим рядом z1 = 14…22.
Перевірний розрахунок зубців на згин виконують за умовою:
|
2T |
z 2 |
K |
Fβ |
K |
FV |
≤ [σ]F , |
|
1 |
1 |
|
|
|
||||
σF = YF Ym |
|
(2.91) |
||||||
d13 b Kε K p cos3 β |
||||||||
де YF – коефіцієнт форми зубця, який залежить від еквівален тного числа зубців zV = z / cos3 β ; Ym – коефіцієнт, що враховує вплив
135
модуля зачеплення, Ym = 0,68m0,2; Kp – коефіцієнт, що враховує вплив геометрії місць дотику профілів зубців, залежить від відношення радіуса кривини ρ та модуля; [σ]F – допустиме напруження на згин зубців, вибирається за аналогією з евольвентними передачами.
2.2.12. Планетарні передачі
Загальні відомості
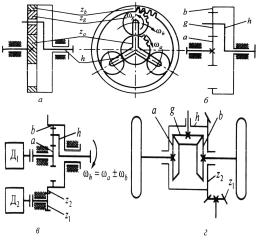
Планетарною передачею називається зубчасто важільний ме ханізм із складним обертовим рухом зубчастих коліс, які мають ру хому вісь обертання і обкочуються за так званими центральними колесами, знаходячись у постійному внутрішньому або зовнішньо му зачепленні.
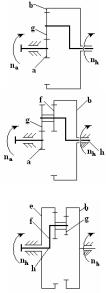
Планетарна передача (рис. 2.19) складається із: центральних коліс із зовнішніми і внутрішніми зубцями za, zb; сателітів zg,; води ла h, на якому розташовані осі сателітів.
Рис. 2.19. Планетарні передачі:
а– конструктивна схема; б – кінематична схема передачі; в – підсумкова диференціальна передача; г – розкладна диференціальна передача
136
Принцип роботи планетарних передач: у разі закріпленого колеса zb (ωb = 0) його обертання za (ωb) викликає обертання сателіта zg відносно власної осі зі швидкістю ωg. Кочення сателіта за zb пере міщує його вісь і обертає водило зі швидкістю ωh.
Сателіт здійснює обертання відносно водила зі швидкістю
ωh =ω l −ω і сумісно з водилом (переносний рух).
g g h
Основними ланками планетарної передачі є ті, що сприйма ють зовнішні моменти і обертаються навколо осі водила. Довільна основна ланка може бути зупинена.
Диференціальною називають передачу, в якій всі основні лан ки рухомі. Диференціальні передачі бувають: підсумкові, в яких здійснюється підсумування руху ланки za і ланки zb на водилі h (рис. 2.19в) і розкладні (рис. 2.19г)– диференціал заднього моста ав томобіля), обертання водила h розкладається між колесами za і zb.
Переваги планетарних передач: менші габарити та маса; більші передаточні відношення за малої кількості коліс; можливість вико ристання в системах автоматичного керування.
Недоліки планетарних передач: підвищені вимоги до точності виготовлення; більша кількість підшипників кочення; к.к.д. змен шується із збільшенням передаточного відношення.
Кінематика планетарних передач
Передаточне число позначається літерою з індексами – uahb ; нижні індекси – напрям передачі руху, верхні – нерухома ланка, ві дносно якої розглядається рух.
Кінематичний аналіз планетарних передач виконують за ме тодом Вілліса. При цьому всій передачі умовно надається обертан ня з кутовою швидкістю водила ωh, тобто водило умовно зупиня ється, а інші ланки звільнюються. Одержаний механізм називається
перетвореним, його ланки матимуть кутові швидкості: |
|
|||||
ωa = ωa −ωh ; |
ωb =ωb −ωh ; |
ωh −ωh = 0 , |
(2.92) |
|||
а передаточне число визначають за формулою Вілліса: |
|
|||||
uabh = |
ωa −ωh = na − nh |
(2.93) |
||||
|
ω |
−ω |
h |
n − n |
|
|
|
b |
|
b |
h . |
|
|
137
Передаточне число uahb має знак мінус для зовнішнього зачеп лення (різний напрям кутових швидкостей) і плюс – для внутріш нього (рис. 2.19а):
|
|
zg |
z |
b |
|
|
z |
b |
|
||
uahb = |
− |
|
|
|
|
|
= − |
|
|
||
z |
|
|
|
z |
. |
||||||
|
|
|
z |
g |
|
|
|||||
|
|
|
a |
|
|
|
|
a |
|||
|
|
|
|
|
|
|
|
|
|
|
|
Залежно від того, яке колесо зупинене b (ωb передаточне число дорівнює:
(2.94)
= 0) чи a (ωa = 0),
ub |
= |
ωa |
=1 |
−uh =1+ |
zb |
; |
якщоω =0; |
|
ω |
|
|||||||
ah |
|
|
a |
z |
a |
|
b |
|
|
|
h |
|
|
|
|
|
|
a |
ωb |
|
|
1 |
=1 |
|
za |
; |
якщоωa =0. |
(2.95) |
ubh = |
|
=1 |
− |
|
+ |
|
|
|||
ωh |
uahh |
zb |
|
|||||||
|
|
|
|
|
|
|
|
Формули для визначення передаточних відношень для пере дач, виконаних за іншими схемами, наведені у табл. 2.1.
Частоту обертання основних ланок знаходять за формулами (2.93). При розрахунку на міцність зачеплень і підшипників сателі тів частоту обертання визначають відносно водила, тобто ngh = ng − nh . Відносна частота обертання сателіта ng визначається із формул:
ng − nh |
= ugah |
= − |
z |
a |
; |
ng − nh = − |
za |
(na − nh ), (2.96) |
na − nh |
|
|
||||||
|
|
zg |
||||||
|
|
zg |
|
|
||||
де na та nh – відомі величини (перше – задане, друге – знаходиться за наведеними у табл. 2.1 формулами).
За усталеного руху система зубчастих коліс знаходиться у рів новазі. Для неї можна записати два рівняння рівноваги:
Ta +Th +Tb = 0;
Taωa +Thωh +Tbωb = 0, |
(2.97) |
|
|
або, якщо ωb = 0 момент на водилі: |
|
138
Th = −Ta uahb ηahb ,
де ηahb – к.к.д. механізму.
На ведучій ланці беруть момент зі знаком плюс, а на веденій – зі знаком мінус.
Таблиця 2.1
Передаточні числа та к.к.д. для різних схем планетарних передач
Схема передачі |
|
Передаточні числа |
|
|
К.к.д. зачеплення |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
та підшипників |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сателітів |
|
|
|
||
|
|
|
b |
|
|
|
na |
|
|
|
|
zb |
|
|
|
|
|
|
|
|
ub −1 |
|
|||||
|
|
uah |
= |
|
|
|
=1 |
+ |
|
|
; |
|
|
|
η = |
1 − |
|
ah |
ψahb ; |
|
|||||||
|
nh |
za |
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
b |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uah |
|
|
|
||||
|
|
|
|
uahb = 3...8 |
|
|
|
|
|
ηahb |
= 0,98...0,96 . |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
b |
|
|
na |
|
|
|
|
|
|
zb zg |
|
|
|
|
|
|
ub −1 |
|
|||||||
|
uah |
= |
|
|
|
|
|
=1 + |
|
|
|
|
|
|
|
; |
ηahb =1 − |
ah |
|
ψahb ; |
|
||||||
|
|
nh |
|
|
|
za z f |
|
|
|||||||||||||||||||
|
|
|
|
|
|
uahb |
|
|
|||||||||||||||||||
|
|
|
|
гahb |
= 8...19 |
|
|
|
|
|
ηahb |
= 0,97...0,95 |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
e |
|
|
nh |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
uhb = |
|
|
|
|
= |
|
|
|
|
|
|
|
|
; |
|
|
|
|
|
|
|
|
||||
|
|
nb |
|
1 − |
|
ze |
zg |
|
|
|
|
1 |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
z f zb |
|
|
|
ηhbe = |
|
|
|
|
|
; |
|||||||
|
|
ze zg |
|
|
|
|
|
|
|
|
|
1 + (uhbe − |
1)ψbeh |
||||||||||||||
|
|
→1;uhbe |
→ ∞; |
|
|
||||||||||||||||||||||
|
|
ηhbe |
= 0,85...0,15 |
|
|||||||||||||||||||||||
|
|
z f |
zb |
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
uhbe |
= 30...1000 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
139
К.к.д. планетарних передач
Втрати потужності складаються із втрат на тертя у зачеплен нях і підшипниках сателіту – ηз, на розмішування мастила ηг. У разі великих швидкостей водила враховують аеродинамічні втрати – ηа:
η = ηз ηг ηа . |
(2.98) |
Втрати потужності на тертя в зачепленні і опорах сателітів за лежать тільки від швидкості відносно водила. Наприклад, для пер шої схеми в табл. 2.1:
Pтр = Tтр (ωa ωh) = Ta (ωa ωh)ψh,
де Pтр – потужність тертя; ψh – коефіцієнт втрат; Tтр = Taψh – момент тертя.
Повна підведена потужність на ведучій ланці Pa = Taψa. Тоді за умови, що η =(Pa −Pтр)/ Pa =−Pтр / Pa ,
отримаємо:
|
ub −1 |
|
|
ηahb =1 − |
ah |
ψ h , |
(2.99) |
b |
|||
|
uah |
|
|
де ψh – коефіцієнт втрат для оберненого механізму:
ψh =ψ agh +ψ gbh +ψ nh ;
ψagh ,ψ gbh – коефіцієнти втрат в зачепленнях; ψnh – втрати в під
шипниках сателітів:
|
T ω −ω |
|
|
i |
|
||
ψnh = ∑ |
i ( i |
h ) |
, |
T ω |
h |
||
1 |
h |
|
|
Ti, ψi – момент тертя і кутова швидкість і го сателіта; Th, ψh – момент і кутова швидкість вихідної ланки (водила).
140