

Учебное пособие по эконометрике Глава 9. Основные положения теории множественной корреляции
9.1 Метод наименьших квадратов (мнк)
В случае корреляционной зависимости каждому аргументу X соответствует не одно строго определенное значение функции Y, что характерно для функциональной зависимости, а ряд распределений ее величины. Говоря более строго: Y находится в корреляционной зависимости от X, если каждому значению аргумента X соответствует ряд распределений функции Y. С изменением X эти ряды закономерно изменяют свое положение.
Функция Y = f (X) называется регрессией Y на X.
Линия регрессии показывает, как смещаются ряды распределения Y с увеличением X или как в среднем изменяется Y с изменением X.
В зависимости от того, рассматривается один или несколько аргументов, или так называемых факториальных признаков корреляционной функции регрессия называется простой (парной) или множественной (многофакторной).
Для практики экономического анализа и планирования наибольшее значение имеет множественная регрессия. В наиболее общем виде задача множественной регрессии заключается в следующем: имеется достаточно мощная статистическая совокупность, распределенная по (m+1) признакам, один из которых – Y, результативен, а остальные – Xj-тые – факториальные.
Требуется найти корреляционную функцию:
Y = f (X1,X2,…, Xm),
то есть уравнение регрессии, которое как можно лучше аппроксимирует исходный статистический материал.
Задачу нахождения регрессии можно также сформулировать в следующем виде:
Yi = f (Xi, a0, a1,…аj…,ap), i=1÷ n, j=0 ÷ p
где Xi и Yi - соответствующие друг другу измеренные значения, а n – число
измерений;
aj= a0,…,ap – параметры уравнения регрессии.
Если бы значения X и Y находились точно, то для отыскания (p+1) параметра достаточно произвести (p+1) измерение.
На самом деле значения X и Y содержат ошибки или не учитываются все факторы, влияющие на Y. Следовательно, никакие (p+1) измерения не позволяют определить истинное значение параметров. Поэтому производится значительно большее число измерений. В результате чего число уравнений будет больше, чем число неизвестных параметров. В этом случае система уравнений будет несовместной, то есть точное решение какого-либо из набора (р+1) уравнения системы может не удовлетворять остальным уравнениям.
Задача состоит в том, чтобы найти такие значения неизвестных параметров, которые будут удовлетворять этим уравнениям наилучшим образом, хотя и неточно. Иначе говоря, требуется найти наиболее вероятные значения неизвестных параметров. Эти вероятные значения будут тем более близки к истине, чем больше число наблюдений. Так как уравнение удовлетворяется неточно, то можно записать:
Yi - f (Xi, a0, a1,…,ap) = εi, i=1÷n
где εi – отклонение измеренных значений Yi от вычисленных по формуле.
Принцип наименьших квадратов утверждает, что наивероятнейшими значениями параметров aj , будут такие, при которых сумма квадратов отклонений будет наименьшая:
![]()
Рассматривая здесь a0, a1,…,ap как зависимые переменные и приравнивая к нулю частные производные от левой части уравнения по этим переменным, получим в точности (р+1) уравнение с (р+1) неизвестными. Составление и решение этой системы особенно просто в том случае, когда функция линейна относительно параметров, то есть можно записать:
(Xi, a0, a1,…,ap) = φ0(x) a0+φ1(x) a1+ …+ φp(x) aр
В этом случае данное уравнение может быть записано в следующем виде:
![]()
Дифференцируя вышеприведенное уравнение по a0, a1,…,ap и приравнивая к 0 производные, получим систему уравнений:
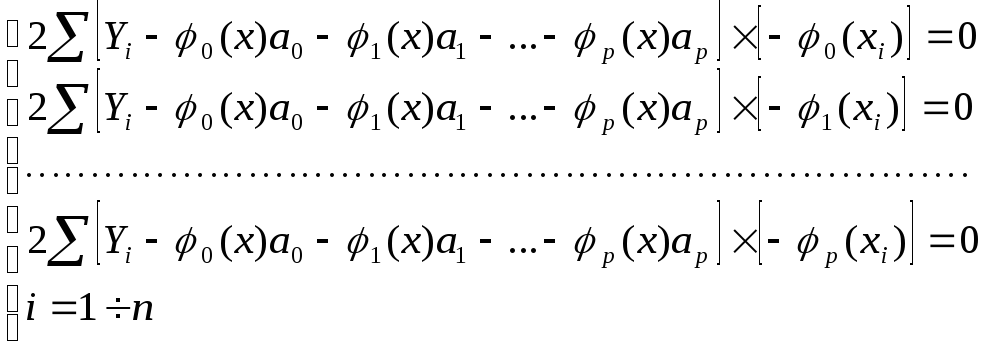
Вводя для краткости обозначения:

Получим из системы
уравнений:
Данная система уравнений – это линейная система уравнений, решение данной системы может быть произведено одним из известных методов решений систем линейных алгебраических уравнений. Эта система уравнений называется системой в нормальной форме.