

УДК 004.8(045)
Раздел 2. МЕХАТРОНИКА, РОБОТОТЕХНИКА И АВТОМАТИЗАЦИЯ
|
|
|
Содержание |
|
|
|
Абрамов Р. А., Абрамов А. И. Разработка системы управления |
|
|||||
беспилотным летательным аппаратом типа гексакоптер...................................... |
|
296 |
||||
Ардашева М. В., Каримова Г. В. Влияние упругих напряжений на |
|
|||||
формирование бистабильных свойств в литомаморфном микропроводе в |
|
|||||
стеклянной оболочке |
............................................................................................. |
|
|
|
300 |
|
Артанов А. М., Загребин Л. Д. Комплексное автоматическое измерение |
|
|||||
плофизических свойств наноструктурируемых материалов с помощью |
|
|||||
калориметров |
......................................................................................................... |
|
|
|
|
304 |
Арцыбашев А. Ю., Никитин Ю. Р. Программный комплекс |
|
|||||
диагностирования ...........систем приводов на основе нейросетевых технологий |
309 |
|||||
Бакулев Д. С., Турыгин Ю. В. Системы технического обслуживания и |
|
|||||
ремонта современного ...................................................................оборудования |
|
|
312 |
|||
Martin Hradský, Bc. (Мартин Храдски), Štollmann Vladimír Проект |
|
|||||
водородной канатной .....................................установки для горных местностей |
|
317 |
||||
Гусев А. В., Закураев В. В. Результаты исследований деформационных |
|
|||||
параметров стружек .......и виброакустических характеристик процесса резания |
321 |
|||||
Зорина У. В. О свойствах многомерных сигналов в базисе Виленкина – |
|
|||||
Крестенсона........................................................................................................... |
|
|
|
|
|
325 |
Зубкова |
Ю . |
В . |
Экспериментальное |
исследование |
точности |
|
позиционирования .....................................................................................робота |
|
|
|
329 |
||
Кленов А. И., Караваев Ю. Л., Трефилов С. А. Лабораторный макет для |
|
|||||
исследования алгоритмов управления систем с изменяющимися инерционно- |
|
|||||
массовыми нагрузками.......................................................................................... |
|
|
|
333 |
||
Князев А. В., Ушаков П. А. Сравнительный анализ характеристик |
|
|||||
фрактального .........................................параллельного колебательного контура |
|
337 |
||||
Князев М. О., Ушаков П. А. Сравнительный анализ ПИД-регулятора |
|
|||||
целого и дробного ...................................................порядков в системе ORCAD |
|
|
341 |
|||
Кузнецов П. Н., Абрамов А. И. Распознавание знаков ограничения |
|
|||||
скорости дорожного ......движения при помощи искусственной нейронной сети |
346 |
|||||
Лемкин А. А., Марков В. В. Стенд для диагностики и градуировки |
|
|||||
термисторов источника ..................электропитания персонального компьютера |
|
350 |
||||
Леонард А. В., Брискин Е. С. Движение шагающей машины с поворотным |
|
|||||
движителем, образованным .........................сдвоенными механизмами шагания |
|
354 |
||||
Milan Luštiak, Bc. (Милан Луштьяк), Štollmann Vladimír Мехатронные |
|
|||||
системы рабочей .....................................................................головки харвестра |
|
|
358 |
|||
Михайлов А. В., Абрамов И. В., Абрамов А. И. Выбор источников |
|
|||||
информации и управляющего воздействия при автоматической |
|
|||||
гидропрессовой ......................................................сборке соединений с натягом |
|
|
363 |
|||
Ivan Mrekaj (Иван Мрекай), Štollmann Vladimír Определение запаса горной |
|
|||||
энергии на вузовском лесном заводе технического университета в г. Зволен |
|
|||||
(Словакия) ............................................................................................................. |
|
|
|
|
|
367 |
294
Мухаметшина И. Ю., Артанов А. М., Ульянов А. Л., Загребин Л. Д. |
||||
Автоматическое измерение |
температуропроводности |
наноструктурируемых |
||
материалов Fe + M (M = C, Si, Ge, Sn) с использованием импульсного |
||||
лазерного излучения.............................................................................................. |
|
|
|
371 |
Нуриева Е. Г., Никитин Ю. Р. Диагностирование оборудования на |
||||
производстве ДСП................................................................................................. |
|
|
|
374 |
Пилин А. А., Турыгин Ю. В., Платов С. А. Автоматизированная система |
||||
управления контрольно-измерительным модулем параметров пружин ............... |
378 |
|||
Платов С. А., Турыгин Ю. В. Исследование и повышение эффективности |
||||
РТК подрезки торцов пружин ............................................................................... |
|
|
381 |
|
Решетова Е. А., Абрамов И. В. Система управления процессом |
||||
формообразования внутренних отверстий ............................................................ |
|
|
384 |
|
Романов А. В., Абрамов А. И., Абрамов И. В. Информационно- |
||||
измерительная система автоматической установки для гидропрессовой сборки |
||||
соединений с натягом............................................................................................ |
|
|
|
389 |
Романов П. А., Трефилов С. А. Разработка лабораторной установки для |
||||
исследования определения степени загрязнения технологических сукон ............ |
392 |
|||
Сергеев Л. С., Никитин Ю. Р. Система диагностирования асинхронных |
||||
двигателей на основе аппарата нечеткой логики .................................................. |
|
395 |
||
Степанов А. Н., Романов А. В., Абрамов А. И., Абрамов И. В. Управление |
||||
давлением и расходом масла при гидропрессовой сборке с использованием |
||||
регулятора грузового типа .................................................................................... |
|
|
|
398 |
Степанов П. И. Использование оборудования National Instruments для |
||||
решения задач диагностики................................................................................... |
|
|
|
402 |
Столбов К. Л., Никитин Ю. Р. Разработка автоматизированного |
||||
иагностического комплекса для контроля электрических двигателей ................. |
405 |
|||
Tináková Daniela (Тинакова Даниела), Štollmann Vladimír, Mária Laciková |
||||
Анализ влияния техники на культуру общества ................................................... |
|
409 |
||
Тютин Е. М., Караваев Ю. Л., Трефилов С. А. Разработка беспроводного |
||||
устройства измерения углового движения и ускорений ....................................... |
|
413 |
||
Филиппов Е. Н., Марков В. В. Устройство для автоматического управления |
||||
скоростью вращения вентилятора источника электропитания персонального |
||||
компьютера............................................................................................................ |
|
|
|
418 |
Шадрин А. В., Брагина Т. В., Ушаков П. А. Моделирование динамических |
||||
систем дробного порядка стандартными средствами среды моделирования |
||||
CADENCE ............................................................................................................. |
|
|
|
422 |
Шалашов С. А., Загребин Л. Д. |
Эллипсометрическое измерение |
|||
температуропроводности |
наноструктурированных |
материалов |
с |
|
использованием импульсного лазерного излучения ............................................. |
|
427 |
||
Шелухо А. В., Караваев Ю. Л., Трефилов С. А. Разработка и исследование |
||||
системы управления Omni-колесным роботом ..................................................... |
|
430 |
||
295
Р. А. Абрамов, магистрант А. И. Абрамов, кандидат технических наук
Ижевский государственный технический университет имени М. Т. Калашникова
Разработка системы управления беспилотным летательным аппаратом типа гексакоптер
Мультикоптер представляет собой беспилотную радиоуправляемую летающую платформу с 4, 6 или 8 бесколлекторными электродвигателями с винтами, расположенными на одном уровне вокруг центральной части, на которой закреплена управляющая аппаратура и полезная нагрузка. В полете платформа занимает горизонтальное положение относительно поверхности земли, может как зависать над определенным местом, так и перемещаться в любом направлении.
Внастоящее время мультикоптеры применяются для получения фото-
ивидеоизображений с воздуха. Могут быть использованы для таких целей, как: инспекция крыш и труб, топографическая съемка местности, наблюдение за природными катаклизмами (пожары, наводнения, землетрясения), мониторинг ситуации на дорогах, снимки археологических участков, снимки с воздуха для новостей.
1. Требования к системе управления.
Модели классических самолетов (планеров) конструктивно обладают таким свойством как «устойчивость». Устойчивость – свойство самолета восстанавливать без вмешательства пилота кинематические параметры невозмущенного движения и возвращаться к исходному режиму полета после прекращения действия возмущений [1]. Мультикоптеры же «статически неустойчивы» и при любом внешнем воздействии сразу начинают неуправляемое снижение (падение). Как правило, этот процесс происходит настолько быстро, что реакции человека не хватает для того чтобы вручную попытаться стабилизировать мультикоптер. Поэтому необходима система управления (СУ), которая максимально упростит управление летательным аппаратом (ЛА) типа мультикоптер и сделает его «устойчивым».
Для создания эффективной системы управления ЛА необходимо выполнение трех условий:
1)Иметь возможность определить в каком состоянии находится ЛА в данный момент времени.
2)Иметь возможность оказывать управляющее воздействие на ЛА.
3)Знать, в каком состоянии необходимо поддерживать ЛА.
2. Типовая навигационная система.
Рассмотрим состав типовой навигационной системы ЛА. (под типовой системой понимается некоторое обобщенное представление о навигационных системах современных беспилотных летательных аппаратов (БПЛА):
296

−приемник спутниковой системы навигации (GPS, ГЛОНАСС и др.),
−датчик давления (абсолютный и/или дифференциальный),
−бесплатформенная инерциальная навигационная система (набор
датчиков угловой скорости (ДУС) и акселерометров).
Приемник спутниковой системы навигации служит для определения координат, горизонтальной скорости и угла поворота траектории БПЛА [1].
Барометрический метод измерения высоты основан на использовании закономерного изменения атмосферного давления с высотой. Зависимость давления воздуха от высоты до 11000 м выражается формулой [1]:
|
|
|
|
t |
|
H |
1 |
|
||
Pн |
P0 |
|
1 |
|
гр |
|
|
|
|
. |
|
|
T |
|
Rt |
|
|||||
|
|
|
|
|
|
гр |
|
|||
|
|
|
|
|
0 |
|
|
|||
Решая это уравнение относительно высоты, получим:
(1)
|
|
|
P |
|
|
T |
||
H |
|
|
н |
Rt |
|
|
|
0 |
1 |
|
|
|
|||||
|
|
|
P |
|
гр |
|
t |
|
|
|
|
|
|
|
|
||
|
|
|
0 |
|
|
|
|
гр |
,
(2)
где R – газовая постоянная (29,27 м/град).
Из формулы видно, что измеряемая высота является функцией четырех параметров: давления на высоте полета Pн, давления P0 и температуры T0 на уровне начала отсчета высоты и температурного градиента tгр.
Если параметры P0, T0 и tгр постоянны, то высота определяется лишь функцией атмосферного давления.
Современные бесплатформенные инерциальные навигационные системы (БИНС) для БПЛА включают в себя микромеханические гироскопы (ММГ) и микромеханические акселерометры (ММА), выполненные по технологии MEMS (Micro-Electro-Mechanical Systems).
Использование датчиков, изготовленных по MEMS-технологии, в БИНС для БПЛА обуславливается их малыми габаритами и массой, малым энергопотреблением и относительно низкой стоимостью. Кроме того, ММГ и ММА отличаются высокой надежностью.
Тем не менее, точность существующих на данный момент ММГ, по сравнению с прочими типами гироскопов, находится на невысоком уровне. Основными погрешностями ММГ и ММА являются дрейф смещения нуля, нестабильность масштабного коэффициента и температурные погрешности чувствительных элементов [2].
297
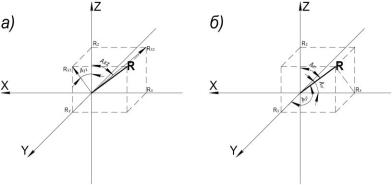
Рис. 1. а) модель гироскопа; б) модель акселерометра Задачей навигационной системы является оценивание вектора состоя-
ния ЛА в полете, например углов крена, тангажа и рыскания.
Так как ММГ является ДУС, то на выходе этого датчика моментальное значение угловой скорости вращения вокруг оси, на которой ориентирован ММГ (Рис. 1а). Интегрирование данных ММГ позволяет перейти от угловой скорости к абсолютному значению угла (Axz, Ayz), но при этом постоянно увеличивается и ошибка, вызванная погрешностью гироскопа. Чтобы избавится от накапливающейся погрешности необходимо периодически корректировать значения вычисленных углов, например с помощью акселерометра и цифрового компаса.
Если ЛА неподвижен, то 3-х осевой акселерометр будет измерять проекцию кажущегося ускорения – вектор, направленный вертикально вверх и численно равный 1g. При коррекции необходимо учитывать, что если ЛА перемещается с ускорением, то ММА измеряет суммарный вектор кажущегося ускорения и ускорения самого аппарата (рис. 1б). Кроме того, эти данные, как правило, сильно зашумлены.
3. Комплексирование информационно-измерительных устройств.
Чтобы скорректировать данные, поступающие от ММГ и ММА, используют комплексирование информационно-измерительных устройств («Sensors Fusion»). ММГ позволяет довольно точно измерить углы наклона ЛА в краткосрочной перспективе, но со временем вычисленные углы «уплывают». ММА, наоборот, дает не слишком точное измерение углов, ошибка достаточно большая, но она при этом не накапливается. Используя определенные алгоритмы можно скорректировать показания этих датчиков, что даст более точное представление о реальных значениях углов.
Вкачестве таких алгоритмов используются:
−комплементарный фильтр (также известный как альфа-бета фильтр),
−ПИ (ПИД) – регулятор,
−фильтр Калмана.
298

Применение комплементарного фильтра предполагает «смешивание» в определенной пропорции интегрированных показаний гироскопа и данных акселерометра:
|
|
( A |
w |
A |
w |
) |
|
|
Aest |
a |
1 |
g |
2 |
|
, |
|
|
( w |
w |
) |
|
||
|
|
|
|
|
|||
|
|
|
1 |
2 |
|
|
|
где Aest |
– скорректированное значение угла; Aa |
||||||
ленное с помощью ММА; |
Ag |
– значение угла, |
|||||
ММГ; w1 |
и w2 – весовые коэффициенты. |
|
|
||||
(3)
– значение угла, вычисвычисленное с помощью
При этом комплементарный фильтр работает одновременно как фильтр низких частот (ФНЧ) для данных, получаемых с акселерометра, и как фильтр высоких частот (ФВЧ) для показаний гироскопа.
Также возможно применение ПИ (ПИД) – регулятора, когда на вход дискретного регулятора подается разница между вычисленными углами наклона от ММГ и ММА. Регулятор вычисляет управляющее воздействие, расчетный угол с гироскопа корректируется на данную величину. П и И коэффициенты выбираются маленькими (менее 1), чтобы эффективно отфильтровывать высокочастотные помехи акселерометра.
Фильтр Калмана использует динамическую модель системы (например, физический закон движения), известные управляющие воздействия и множество последовательных измерений для формирования оптимальной оценки состояния. Алгоритм состоит из двух повторяющихся фаз: предсказание и корректировка. На первом рассчитывается предсказание состояния в следующий момент времени. На втором, новая информация с датчика корректирует предсказанное значение (также с учетом неточности и зашумленности этой информации) [3].
Фильтр Калмана можно упрощенно представить как комплементарный фильтр с автоматически подстраивающимися весовыми коэффициентами.
После определения ориентации БПЛА возникает задача перехода от системы координат, связанной с ЛА к наземной системе координат. Простейшим способом решения является использование матрицы поворота. Данный метод очень сложен для вычисления, т.к. приходится работать с большим количеством тригонометрических функций. Поэтому в некоторых случаях более рациональным является использование матрицы направляющих косинусов (DCM – Direction Cosine Matrix), которая позволяет решить эту задачу в векторной алгебре и с минимальным использованием тригонометрических функций.
Для создания системы управления БПЛА необходимо провести исследование и определить эффективность различных алгоритмов комплексирования информационно-измерительных устройств.
Предположительно, перспективным представляется использование расширенного фильтра Калмана совместно с геометрической моделью на базе кватернионов.
299
Список литературы
1.Конспект лекций Современная элементная база систем управления ЛА. М.:
МАИ, 2007. 74 с.
2.Разработка микромеханической инерциальной навигационной системы с функциями начальной выставки в обеспечение создания высокоточного оружия и управляемых средств поражения, в том числе артиллерийских управляемых боеприпасов. С-П.: ЗАО «ГИРООПТИКА», 2006. 461 с.
3.Ким, Д. П. Теория автоматического управления. Т. 2. Многомерные, нелинейные, оптимальные и адаптивные системы: Учеб. пособие. М.: ФИЗМАТЛИТ,
2004. 464 с.
М. В. Ардашева, магистрант
Г. В. Каримова, кандидат физико-математических наук, доцент Ижевский государственный технический университет
имени М. Т. Калашникова
Влияние упругих напряжений на формирование бистабильных свойств в литомаморфном микропроводе в стеклянной оболочке
Физика литого аморфного микропровода в стеклянной оболочке (ЛАМСО) является одной из быстроразвивающихся областей физики конденсированного состояния. Большой интерес, который привлекают к себе ЛАМСО, обусловлен как фундаментальными, так и прикладными аспектами. Одними из наиболее перспективных ЛАМСО, как с точки зрения их практического использования, так и с точки зрения изучения особенностей структуры аморфного состояния, являются ЛАМСО на основе железа. Главная характерная особенность этих новых материалов в том, что они имеют прямоугольную петлю гистерезиса (ППГ), даже если их длина очень мала – до 2 мм. Такое магнитное поведение истолковывается следствием баланса между магнитоупругой энергией, индуцируемой внутренними или внешними напряжениями и магнитостатической энергией из-за полей рассеяния на концах проволоки [1].
Особого внимания заслуживают ферромагнитные сверхтонкие аморфные провода, покрытые изолирующим стеклом, получаемые по модифицированной технологии Улитовского-Тейлора [2]. Данная технология позволяет получить микропровод диаметром в пределах от 0,5 до 50 мкм с толщиной изолирующего стекла от 1 до 15 мкм и различных составов. Этот тип микропроводов также характеризуется бистабильностью.
Наличие уникальных магнитных свойств, включая бистабильность, определяется процессом изготовления микропровода. В процессе остывания из-за разности коэффициентов термического расширения α металла и стекла в микропроводе фиксируются остаточные напряжения, которые существенно влияют на магнитные характеристики [3]. В рамках теории
300
распределения остаточных напряжений микропровод можно представить в виде цилиндрических областей [3,4]. Вследствие электрохимического взаимодействия между наружной поверхностью металлической жилы и стеклянной оболочкой возникает сильное сцепление. От поверхности жилы до радиуса области поверхностной деформации происходят релаксационные уменьшения упругих напряжений. В области поверхностной деформации наблюдается пластическая релаксация напряжений. Соответственно магнитные свойства напрямую зависят от соотношения толщины стеклянного покрытия и диаметра металлической жилы. Чем больше величина этого отношения, тем больше значение поля старта Hs [3].
На распределение напряжений и изменение магнитных свойств, и релаксационную стойкость в микропроводе можно влиять таким способом, как стравливание его стеклянной оболочки.
При изготовлении образцов особый акцент сделан на разработке технологии раздельного стравливания стеклянной оболочки, что позволило тщательнее изучить процессы переключения бистабильных ферромагнетиков. Проведены опыты по стравливанию провода ЛАМСО из
Fe70B15Si10 , СoMn6B15Si10, Fe81,6Mn9.3B1.8Si6C1,3. На каждый опыт бралось
по 15 образцов, стравливание происходило в отдельных образцах по середине, с торцов и целого провода. Изменение свойств ЛАМСО регистрировалось осциллографическим методом измерения.
В ходе исследований было выявлено:
‒при стравливании по всей длине, провод из бистабильного состояния переходит в 4-стабильное, и время старта сигнала уменьшается в 2 раза. Переход в 4-стабильное состояние происходит в зависимости от химического состава микропровода и толщины жилы. Например, после
стравливания Fe81,6Mn9.3B1.8Si6C1,3 остается в бистабильном состоянии в отличие от Fe70B15Si10C5, при этом поле старта так же уменьшается в 2 раза.
‒аналогично происходит если стравливать провод с торцов и по середине. При этом время старта уменьшается в 1,5 раза
Исследования проводились на специально созданной магнитометрической аппаратуре, позволяющей исследовать динамику переключения индукционным методом. Контроль внешнего вида образцов (оболочки, торцов микропровода) осуществлялся с помощью микроскопа ИНФРАМ-И для того, чтобы выявить дефекты микропровода, и проконтролировать качество стравливания . Для фиксирования сигнала на осциллографе был установлен усилитель с коэффициентом усиления К = 118.
Стравливание образцов происходит путем погружения их в пла-
виковую кислоту. Образцы из сплава Fe70B15Si10C5 стравливались с торцов по середине и полностью с разным интервалом времени. Изменение соотношения диаметра металлической жилы к толщине стекла приводит к получению 4-х стабильного образца, т. е. образца с четырьмя скачками намагниченности за один цикл переключения [5, 6]. Осциллограммы
301
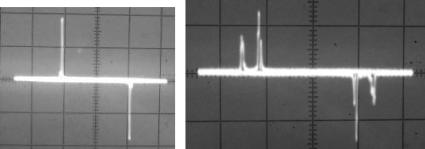
наблюдаемых импульсов представлены на рис. 1, а, б.
а) Бистабильное состояние |
б) Четырехстабильное состояние |
микропровода |
микропровода |
Рис. 1. Осциллограмма импульсов ЭДС от БСБ микропровода из сплава Fe70B15Si10C5 до и после химической обработки образца с одного торца (масштаб: по вертикали 1 дел. – 20 мВ, по горизонтали 1 дел – 0,4 В)
Экспериментальные исследования свидетельствуют о том, что чем больше величина отношения диаметра жилы к диаметру стекла dж / dст ,
тем меньше значение поля старта Hs. Эта закономерность подтверждается в исследуемых нами материалах приведенных в таблице:
Таблица.
Зависимость поля старта Hs от отношения
d |
ж |
/ d |
ст |
|
|
Материалы |
d |
ж |
/ d |
ст |
Нs, А/м |
|
|
|
|
||
|
|
|
|
|
|
Fe70B15Si10C5 |
|
0,67 |
|
35 |
|
СoMn6B15Si10 |
|
0,75 |
|
98,9 |
|
Можно выделить следующие условия создания образцов с 2-х или 4- стабильными свойствами в ЛАМСО:
1)Химический состав металлической жилы необходимо выбирать исходя из условия получения положительной магнитострикции. Класс материалов с положительной магнитострикцией включает достаточно большую группу Fe- и Fe-Co-сплавов, которые выбраны для исследований в данной работе.
2)Разница коэффициентов термического расширения стекла и металла является варьируемым параметром и обеспечивается технологией получения ЛАМСО.
3)Соотношение толщины стеклянной оболочки и диаметра металлической жилы необходимо выбирать таким образом, чтобы при заданных коэффициентах термического расширения и модулей Юнга стекла и металла, продольные напряжения внутри металлической жилы находились в зоне упругих или упругопластических напряжений.
302
Стеклянное покрытие удерживает металлическую жилу микропровода в напряженном состоянии. Экспериментальные исследования, проведенные методом ферромагнитного резонанса в работе [7] свидетельствуют о том, что остаточные напряжения в жиле действительно убывают от поверхности к центру. Удаление стекла на торце приводит к тому, что создаются области с меньшей величиной магнитоупругой энергией, т.е. искусственно формируется область локализации зародышей перемагничивания инициирующих релаксационный механизм переключения. При вытравливании металлической жилы, наоборот уменьшается объем замыкающих доменов и увеличивается структурная неоднородность в результате неравномерного вытравливания, что объясняет рост Hs .
Величина упругих напряжений определяется также геометрическими размерами – толщиной стеклянной оболочки dст и диаметром металлической жилы dж. Изменяя dст, dж и величину магнитострикции насыщения λs можно создавать напряжения с заданными параметрами. Этот факт указывает на то что, существует возможность управления величиной энергии ДГ, необходимой для переключения ферромагнетика, а, следовательно, и величиной поля старта Нs.
В ходе проведенных исследований можно сделать вывод, что при стравливании уже на первом этапе поле старта и флуктуация уменьшается. Зависимость поля старта от времени стравливания носит экспоненциальный характер. Все это говорит о том, что во время стравливания происходит снятие напряжений, которые появляются в процессе изготовления стекла. Главной причиной появления таких напряжений является существенная разница коэффициентов теплового расширения стекла и металлической жилы. При стравливании происходит снятие этого напряжения, в результате чего уменьшается и поле старта, при котором появляются БСБ, а как следствие этого уменьшается и флуктуация.
Список литературы
1.Vazguez, M., Gomez – Polo C., Chen, D.X., Hernando, A. Magnetic bistability of amorphous wires and sensor applications // IEEE Trans. Magnetics. – 1994. – Vol. 30. –
¹.2. – P. 907-912.
2.Мирошниченко, И.С., Башев, В.Ф., Покровский, Ю.К., Спектор, Е.З. Структура и свойства литого микропровода из сплавов Fe-C-B// Изв. АН СССР. Металлы, 1980 г., с. 117-120.
3.Баранов, С.А. Остаточные напряжения в жиле аморфного микропровода//Металловедение и термическая обработка металлов, №7, 2003. - с. 38-40.
4.Баранов, С.А., Каримова, Г.В., Ломаев, Г.В. Движение доменной стенки в литом аморфном микропроводе//Электронная обработка материалов, № 2.- 2006. – c.77 -81.
5.Каримова, Г.В. Четырехстабильное состояние аморфного микропровода в стеклянной изоляции. Магнитные явления: сб. ст. под ред. Ломаева Г.В. – Ижевск: ИжГТУ, 2004. – С. 176-180.
6.Lomaev, G.V., Karimova, G.V. The converters of the magnetic field on base 2-
303
and 4- stable amorphous mikrowire// Proceedings 32nd International Conference and NDT Technique Exposition «Defectoskopy 2002». – Liberec . -2002, p. 107-113.
7. Баранов, С.А. Оценка распределения остаточных напряжений в жиле аморфного микропровода//МиТОМ. – 2001, №4, с. 34-36.
А. М. Артанов, аспирант
Л. Д. Загребин, доктор физико-математических наук, профессор Ижевский государственный технический университет
имени М. Т. Калашникова
Комплексное автоматическое измерение теплофизических свойств наноструктурируемых материалов с помощью калориметров
Внастоящее время, в связи с быстрым развитием промышленности, стало актуальным применения наноструктурируемых материалов как в машиностроении, так и в химической промышленности, поскольку установлено, что уменьшение размеров зерен ниже 100 нм сильно изменяет механические и физико-химические свойства материалов.
Всвязи с этим необходимы данные о теплофизических свойствах веществ. Важнейшими теплофизическими свойствами (показателями качества) материалов, являются их теплопроводность, теплоемкость, температуропроводность. Измерения теплофизических свойств материалов, как правило, отличаются сложностью и трудоемкостью проведения эксперимента. Поэтому разработка новых и усовершенствование уже имеющихся методов, а также создание реализующих эти методы новых экспериментальных установок, позволяющих автоматизировать процесс, повысить точность и оперативность теплофизических измерений [1], является актуальной задачей.
Измерители ИТ-с-400 и ИТ- -400 предназначены для определения удельной теплоемкости и теплопроводности твердых, сыпучих и жидких материалов в диапазоне температур от минус 100 до +400 С. Само измерение теплофизических свойств (теплоемкости и теплопроводности) осуществляется методом динамического калориметра в режиме монотонного нагрева со средней скоростью 0,1 К/с, с автоматическим регулированием температуры [2].
Обобщенная схема установки для измерения теплофизических свойств веществ представлена на рис. 1.
304
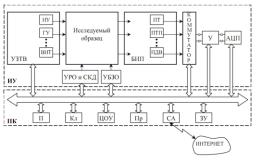
Рис. 1. Структурная схема компьютерного устройства для измерения теплофизических свойств веществ
ИУ – измерительное устройство; УЗТВ – устройство задания тепловых воздействий на образец, обеспечивающее управление начальными условиями (НУ), граничными условиями (ГУ) и внутренними источниками тепла (ВИТ); БИП – блок измерительных преобразователей, включающий в себя преобразователи температуры (ПТ), преобразователи теплового потока (ПТП), преобразователи других величин (ПДВ); У – усилитель; АЦП – аналого-цифровой преобразователь; УРО и СКДустройство для размещения образца и создания контактного давления; УБЗО – устройство боковой защиты образца от теплообмена с окружающей средой; ПК – персональный компьютер, включающий в себя: П – процессор; Кл – клавиатуру; ЦОУ – цифровое отсчетное устройство; Пр – принтер; СА – системный адаптер; ЗУ – запоминающее устройство.
Устройство задания тепловых воздействий (УЗТВ) позволяет при подготовке к эксперименту создать в образце необходимые начальные условия (НУ) за счет управления граничными условиями (ГУ) и внутренними источниками тепла (ВИТ), а затем в ходе эксперимента изменять значения ГУ и ВИТ по закону, заданному программным обеспечением персонального компьютера (ПК). Устройство УРО и СКД служит для размещения образца и для создания контактного давления на внешних поверхностях образца, что позволяет снизить контактные тепловые сопротивления на граничных поверхностях образца.
Блок измерительных преобразователей (БИП) включает в себя преобразователи температуры (ПТ), преобразователи теплового потока (ПТП), преобразователи других величин (ПДВ), например, устройства для измерения электрической мощности, тока, напряжения и т.п. Коммутатор обеспечивает возможность подключения выходного сигнала любого из измерительных преобразователей ко входу усилителя У, коэффициент передачи которого задается персональным компьютером ПК. Выходной сигнал усилителя преобразуется аналого-цифровым преобразователем (АЦП) в цифровой сигнал, воспринимаемый персональным компьютером ПК. Устройство боковой защиты образца (УБЗО) позволяет создать
305

необходимые тепловые условия на боковых поверхностях исследуемого образца, например, адиабатические условия, позволяющие исключить теплообмен боковых поверхностей образца с окружающей средой.
Персональный компьютер (ПК) обеспечивает управление ходом эксперимента как во время его подготовки, так и во время активной стадии проведения эксперимента. Системный адаптер (СА) позволяет проводить теплофизический эксперимент в режиме удаленного доступа через Интернет.
На рис. 2 приведена структурная схема экспериментальной установки, на которой проводились измерения теплопроводности и теплоемкости.
Рис. 2. Структурная схема экспериментальной установки.
Измерительные приборы ИТ-с-400, ИТ-λ-400 создают тепловое воздействие, подаваемый на образец в адиабатизированной оболочке. Изменение температур на образце регистрируется термопарами, усиливается блоком предварительных усилителей и поступает на вход платой согласования сигналов и сбора данных SCXI-1112 . Компьютер служит для регистрации и дальнейшей обработки сигнала. Для избегания влияния окислительных процессов во время эксперимента, измерения возможно производить в среде аргона. В измерительную ячейку производиться накачка аргона, и поддерживается во время эксперимента.
Программное обеспечение автоматизированной экспериментальной установки имеет модульную структуру (рис. 3) и разработано в среде графического программирования LabVIEW 9.0 [3]. Достоинствами данной среды являются возможность быстрого создания кодов программ, наличие богатой библиотеки функций математической обработки информации, наличие драйверов аппаратных средств сбора данных, наглядность кода и возможность создания приложений, обеспечивающих работу измерительной установки в режиме удаленного доступа (по каналам сети Интернет).
306

Рис. 3. Структурная схема программного обеспечения автоматизированных измерительных установок для определения зависимости теплопроводности и теп-
лоемкости от температуры
Панель управления включает область ввода исходных данных, которые включают в себя:
−фамилию, имя и отчество исследователя (оператора, производящего измерения);
−дату проведения эксперимента;
−номер образца;
−номер опыта с данным образцом.
Кроме этого, имеются органы управления, позволяющие выбрать следующие действия:
− проведение подготовительного этапа эксперимента. В этом режиме оператор наблюдает за изменением температуры в слое нагревателя и контролирует значение индикатора скорости изменения температуры;
На рис. 4 показана лицевая панель главного модуля программы, в котором пользователю предоставляется возможность выбора дальнейших действий.
Рис. 4. Лицевая панель главного модуля программного обеспечения
На рис. 5 показана лицевая панель виртуального прибора, реализующего управление ходом эксперимента по определению теплопроводности и теплоемкости.
307

. 
Рис. 5. Лицевая панель виртуального прибора, реализующего управление ходом эксперимента по определению теплопроводности и теплоемкости
Виртуальный прибор включает в себя два графических индикатора, отображающих изменение теплоемкости и теплопроводности от температуры. По измеренным параметрам в виртуальном приборе можно определить температуропроводность материала. Она связана с теплоемкостью (СP), теплопроводностью ( ) и плотностью ( ) следующим выражением:
a |
|
|
|
|
|
C |
P |
|
|
|
.
С автоматизацией приборов ИТ-с-400 и ИТ- -400 удалось значительно уменьшить трудоемкость получения измерительной информации, появилась возможность одновременного измерения теплоемкости и теплопроводности, обработки экспериментальных данных. Результаты эксперимента получают с желаемой дискретностью, в нужном диапазоне температур.
Погрешность измерения теплоемкости и теплопроводности не превышает 10 %.
Список литературы
1.Применение новых информационных технологий в дистанционном инженерном образовании и научных исследованиях / С.В. Мищенко, С.В. Пономарев, А.Г. Дивин, А.А. Чуриков, Г.В. Мозгова // Научный сервис в сети Интернет: Труды всероссийской научной конференции (20 – 25 сентября 2004 г., г. Новорос-
сийск). – М.: Изд-во МГУ, 2004. – С. 200.
2.Платунов, Е.С, Буравой, С.Е., Курепин, В.В. и др. Теплофизические измере-
ния и приборы. – Л.: Машиностроение, 1986. – 256 с.
3.Евдокимов, Ю.К. LabVIEW для радиоинженера: от виртуальной модели до
308
реального прибора. Практическое руководство для работы в программной среде LabVIEW / Ю.К. Евдокимов, В.Р. Линдваль, Г.И. Щербаков. – М. : ДМК Пресс,
2007. – 400 с.
А. Ю. Арцыбашев, магистрант
Ю. Р. Никитин, кандидат технических наук, доцент Ижевский государственный технический университет имени М. Т. Калашникова
Программный комплекс диагностирования систем приводов на основе нейросетевых технологий
Исследование проблем диагностирования приводов является актуальным в тех отраслях, где аварии приводов вызывают угрозу жизни и здоровью человека, а также приводят к значительным финансовым потерям [1– 5]. На производстве выход из строя систем приводов, имеющих большие мощности, а так же участвующих в непрерывных производственных процессах может привести не только к внеплановому простою, но и к поломке сопутствующего их оборудования. Своевременное обнаружение дефектов приводов предотвращает аварийные ситуации.
В современном производстве широко используются приводы, построенные на асинхронных двигателях. Создание системы диагностирования, включающей в себя набор измерительных средств и программного продукта на основе интеллектуальных алгоритмов обработки данных, позволяет проводить функциональную диагностику приводов, сохранять результаты диагностирования в базе данных.
Одним из эффективных инструментов технической диагностики являются методы искусственного интеллекта. Искусственные нейронные сети используются для решения разнообразных задач, в том числе и технической диагностики [5–6].
Среди разработчиков программных продуктов для вибродиагностики можно выделить ряд фирм: Инкотес, Ресурс, ОАО «ВиброАкустические Системы и Технологии». Недостатком программных продуктов данных производителей можно считать то, что для работы с ними необходимы специальные приборы, производимые этими фирмами, а также то, что они являются узкоспециализированными.
В разработанной системе диагностирования используется система сбора данных – крейтовая система LTR, для которой существуют только ре- гистраторы-самописцы (программы LGraph 1, LGraph 2, PowerGraph, АСTest), не имеющие интеллектуальных алгоритмов обработки данных на базе нейронных сетей для технической диагностики.
Данные, полученные при помощи системы LTR, регистрируются программой LGraph 2, сохраняются в текстовом файле и анализируются разработанным программным комплексом диагностирования. Программа
309
написана на языке высокого уровня C# в среде .NET Framework, что позволяет обеспечивать безопасность и переносимость программ для платформы Windows. Язык С# позволяет реализовать объектноориентированный подход. В качестве среды разработки был выбран программный продукт Microsoft Visual Studio 2008. Эта среда имеет обширный набор инструментов и библиотек. Программный комплекс диагностирования систем приводов является приложением Win32 и основан на двух классах, один из которых содержит главный метод Main, а второй служит для реализации экранной формы. Нейронная сеть построена в виде методов и наборов статических параметров. Планируется написание библиотек, предназначенных для работы с нейронными сетями на языке С#. Структурная схема программного комплекса представлена на рис. 1.
Предварительная обработка данных программным продуктом реализуется набором алгоритмов диагностирования, основанных на измерении диагностических параметров – силы тока статора привода, температуры, вибрации.
Рис. 1. Структурная схема программного комплекса диагностирования асинхронных двигателей на основе аппарата искусственных нейронных сетей
Анализ вибраций привода является наиболее информативным методом наряду с вихретоковым, магнитным методами. По вибрационным характеристикам можно выявить следующие дефекты: дисбаланс масс ротора, расцентровка, задевания и затирания, дефекты подшипников. Все перечисленные дефекты имеют характерную спектральную картину, которая может обрабатываться искусственной нейронной сетью.
Обработка данных в нейронной сети непосредственно связана с архитектурой сети. Выбор архитектуры нейронной сети позволяет встраивать в нее априорную информацию, что обеспечивает специализацию сети и сокращает количество свободных параметров. К сожалению, в настоящее
310
время не существует какой – либо формализованной теории оптимизации структуры нейронных сетей или оценки влияния архитектуры сети на представление знаний в ней. Ответы на эти вопросы обычно получают экспериментальным путем. При этом сам разработчик нейронной сети становится важным элементом цикла структурного обучения [8]. Вычислительная мощность современных персональных компьютеров достаточно велика для работы с искусственными нейронными сетями, поэтому для решения задач диагностирования была выбрана обычная полносвязная многослойная сеть.
Выбор конфигурации входных данных осуществляет сам пользователь. Успех работы нейронной сети во многом зависит от правильно сформированных входных данных. Робастность сети можно повысить, представляя каждый дефект отдельной группой нейронов [9].
Для реализации нейросетевого алгоритма выбрана сигмоидная активационная функция, позволяющая использовать самый популярный алгоритм обучения – обратное распространение ошибки. Пользователь сам может выбирать количество слоев, нейронов в каждом слое и входов сети. Варьируя данными параметрами можно изменять количество свободных параметров, что в свою очередь увеличивает или уменьшает вычислительную мощность сети. Для каждой задачи, реализуемой нейронной сетью необходимо подбирать соответствующую вычислительную мощность. Слишком мощная сеть может неточно аппроксимировать многомерную функцию и выдавать неправильные результаты.
Обучение нейронной сети является сложным процессом, который может протекать длительное время. Пользователь программного продукта может самостоятельно задавать требуемую точность либо количество эпох, а также скорость обучения сети. В программе также предусмотрены инструменты, обнаруживающие паралич нейронов сети.
Для реализации прогнозирования остаточного ресурса создается отдельная нейронная сеть, которая следит за динамикой развития дефектов в объекте. Для хранения весовых коэффициентов используются базы данных Microsoft Access или текстовые файлы.
Наборы входных параметров получены из серии экспериментов. Проверка адекватности работы нейронной сети выполняется при помощи сторонних приборов и программных продуктов. Многомодульный принцип построения программы и наличие открытого кода позволяет сторонним разработчикам дополнять код своими методами и алгоритмами, что в перспективе будет увеличивать возможности программного продукта для диагностирования систем приводов.
Список литературы
1. Nikitin, Y.R., Abramov, I.V. CNC machines diagnostics. – Proceedings 13-th International Simposium on Mechatronics. – 2-4 June, 2010. – Trencinske Teplice, Slo-
311
vakia. P. 89–91.
2.Nikitin, Y.R., Abramov, I.V. Models of information processes of mechatronic systems diagnosis // University Review. – 2011. – V. 5. – № 1. – P. 12–16.
3.Никитин, Ю. Р., Абрамов, И. В. Информационные процессы в устройствах диагностирования мехатронных систем // Интеллектуальные системы в производстве. – 2011. – № 1 (17). – С.206–215.
4.Никитин, Ю.Р. Диагностика станков с ЧПУ // Интеллектуальные системы в производстве. Научно-практический журнал. – 2008. – № 12 (2). – С.89-90.
5.Nikitin, Y. Diagnostics of mechatronic systems on the basis of neural networks. – State-of-the-Art in Mechatronics, Vol. 2. – Alphen aan den Rijn: Simulation Research
Press, 2010. P. 167–188.
6. Barborák Oto, Eperješi, M., Andrejčák, Imrich, Božek Pavol. Production accuracy check using neural network statistics // University Review. - Vol. 3, No. 3 (2009). P. 3-7.
7.Božek Pavol, Moravčík Oliver, Štollmann Vladimír, Šuriansky Jozef, Prajová Vanesa, Waleková Gabriela. Virtual program imported into the real technological workplace // Annals of DAAAM and Proceedings of DAAAM Symposium. - Vol. 19, No.1. Annals of DAAAM for 2008 & Proceedings of the 19th International DAAAM Symposium «Intelligent Manufacturing & Automation: Focus on Next Generation of Intelligent Systems and Solutions», 22-25th October 2008, Trnava, Slovakia. - Viedeň : DAAAM International, 2008. P. 157-158.
8.Хайкин, С. Нейронные сети. – М.: ООО «И.Д. Вильямс», 2006. – 1104 с.
9.Hinton, G.E. Shape representation in parallel system // Proceedings of the 7th International Joint Conference on Artificial Intelligence. Vol. II University of British Columbia, Vancouver, B.C, Canada. P. 1088 – 1096.
Д. С. Бакулев, аспирант
Ю. В. Турыгин, доктор технических наук, профессор Ижевский государственный технический университет имени М. Т. Калашникова
Системы технического обслуживания и ремонта современного оборудования
Производство высококачественной продукции зависит от технического состояния оборудования. Надежность этого оборудования поддерживается системой технического обслуживания и ремонта (ТОиР).
ТОиР оборудования является системой, которая развивается на промышленном предприятии и связана с развитием общественного разделения труда и повышением качества продукции. При производстве продукции существуют не только основные процессы, обеспечивающие конечные результаты деятельности, но и вспомогательные, создающие необходимые условия для целесообразного, бесперебойного действия основных процессов. На предприятиях обычно организуют целый комплекс вспомогательных и обслуживающих служб и хозяйств. Это имеет определенные недостатки.
312
Во-первых, центральное место отводится основным процессам, что часто приводит к их отождествлению с производственным процессом в целом. Обслуживающим и вспомогательным процессам [1] отводится второстепенная роль, что неправомерно, поскольку все они находятся в тесной взаимосвязи.
Во-вторых, термин «вспомогательные» является неудачным, поскольку отождествляется термином «второстепенные».
В-третьих, неправомерно разделяются обслуживающие и вспомогательные процессы. Эти процессы выполняют в действительности одну и ту же функцию технического обслуживания производства. Они не отличаются не по месту в общем производственном процессе, ни по роли в осуществлении принципов его организации.
Промышленные предприятия, решая текущие проблемы, откладывают на неопределенный срок замену устаревших основных фондов, состояние работоспособности которых поддерживается в основном за счет их ремонта и технического обслуживания [2]. Следовательно, некоторые отросли буквально «выживают» за счет ремонта, с каждым годом наращивая изношенное оборудование.
Основную часть оборудования предприятий любой отрасли машиностроения составляют станки и машины. Их соответствие техническим показателям, гарантируемых заводами-изготовителями, требует четкого соблюдения предприятиями-владельцами оборудования комплекса требований [3] к его эксплуатации и выполнения системы мероприятий в режиме планово-предупредительного ремонта (ППP). Появление и внедрение системы ППР оборудования исторически увязывается с усложнением конструкции оборудования. Усложняется оборудование - повышаются эксплуатационные требования от производителя, которые, в свою очередь, требуют реакции от ремонтной службы на этот, свершившийся факт. Нормативно-техническая документация регламентирует техническое обслуживание, ресурсные ремонты, которые все более насыщаются по своему составу в зависимости от конструкции, и по срокам исполнения в прямой зависимости от времени реальной наработки оборудования.
Отличительной особенностью российской системы организации ППР является формальный учет времени работы оборудования. Причем, как «организовать» этот формальный учет, рекомендует каждый второй нормативный источник. В то же время, учетное время работы оборудования принимается за основу при формировании ремонтного цикла. Происходит опережение в планировании, что, в конечном счете, создает обманчивое впечатление относительно истинного состояния по износу оборудования в процессе эксплуатации. Только этим можно объяснить другую особенность отечественной системы ППР, нашедшую широкое применение на практике, ‒ структуру ремонтного цикла. В него включен, помимо текущего и капитального ремонтов, средний ремонт. До сих пор, ни один источник не может конкретизировать его сущность. Различия капитального
313
и среднего ремонтов состоят в следующем: при капитальном ремонте ремонтируются как базовые, так и другие детали и узлы, а при среднем производится капитальный ремонт и восстановление основных изношенных деталей. Конструкция современного станка большей частью модульного типа. То есть ресурсные проблемы можно рассматривать во времени, как проблемы отдельных модулей, решение которых исключает проведение капитальных ремонтов единым циклом для всей конструкции. Поэтому серию средних ремонтов можно рассматривать как разнесенный цикл капитального ремонта.
Традиционная привязка ремонта оборудования к службе главного механика выявила ряд проблем, на которые не обращать внимания при реализации ремонтных технологий на современном оборудовании становиться невозможным:
1)разработка нормативных документов по эксплуатации оборудования предприятий, как правило, поручается службе главного механика, которая
всилу своей компетенции, добросовестно формирует графики ремонта оборудования, эксплуатационные нормы на конкретные модели оборудования;
2)оценка технического состояния оборудования в процессе эксплуатации производится также с упором на благополучие механической составляющей, хотя она лишь составная часть конструкции.
В практике отечественных заводов действуют две системы админи- стративно-технического управления: децентрализованная система обеспечения ремонта оборудования и централизованная система обеспечения ремонта. В методической литературе представлена и смешанная система, когда ремонты на уровне среднего и капитального производятся централизованно на базе ремонтно-механического цеха. До конца 70-х годов прошлого столетия на средних и крупных предприятиях отечественного машиностроения превалирует децентрализованная система ремонта. Этому есть объективные причины: относительно несложная конструкция оборудования; длительный срок амортизации оборудования, который отрицательно влияет на скудный рынок оригинальных запасных частей. Есть и другая проблема в обеспечении ремонта оборудования - неоднозначность организационной структуры обеспечения ремонта. С 80-х годов
встаночных парках предприятий растет процент станков с числовым программным управлением (ЧПУ) и к ним приравненных. Появляется понятие электронной составляющей конструкции оборудования. Именно она становится дестабилизирующим звеном для децентрализованного сервиса. Практика применения станков с ЧПУ на отечественных заводах и за рубежом показала, что внедрение станков, техническая подготовка производства и эксплуатация производственных участков наиболее эффективны при наличии на предприятии специальной эксплуатационнотехнологической службы, структура которой позволяет оперативно решать все возникающие задачи. Концепция сродни концепции комплекс-
314
ного ремонта оборудования. Сложное оборудование быстро выявит слабые места в существующей системе обеспечения ремонта.
Стремление к внешней кооперации возникает у предприятий при наличии:
1)технической проблемы, не находящей решения внутри предприятия;
2)присутствия экономической выгоды для предприятия в работе внешних организаций по решению возникшей проблемы.
До 80-х годов прошлого столетия внешняя кооперация по сервисным проблемам на российских машиностроительных предприятиях не выходит за пределы работы в разрезе исполнения гарантийных обязательств на приобретаемое оборудование. Объем специализированного ремонта технологического оборудования имеет небольшой удельный вес. Имеющиеся предприятия не оказывают заметного влияния на экономику ремонтного производства промышленных предприятий.
Современная российская промышленность в вопросах организации ремонта технологического оборудования ограниченно использует информационные технологии. Современный этап развития информационных технологий в промышленности связан с CALS-технологиями, то есть с использованием технологий непрерывной информационной поддержки жизненного цикла изделия. Использование CALS-технологий в производственном процессе ремонта и обслуживания технологического оборудования должно позволить оптимизировать и значительно снизить затраты на исполнение ремонтных технологий. С их помощью в организации сервисного обслуживания и ремонта оборудования можно оптимизировать один из самых непрогнозируемых компонентов затрат при ремонте оборудования, наиболее стимулирующий производство, - время простоя оборудования в ремонте.
Проблема организации и выполнения ремонтных работ на современном парке технологического оборудования актуальна в машиностроении РФ. Сегодня достаточно отрицательных сторон в реализации требований
кремонтным технологиям в имеющемся парке оборудования промышленных предприятий. Ремонт и обслуживание оборудования на предприятиях машиностроения неразрывно связаны с деятельностью служб главного механика и энергетика. Координация действий в их деятельности практически отсутствует. Неспособность оперативно решить возникшие проблемы с оборудованием приводят к неоправданно долгим временным затратам при реализации ремонта. Как следствие, повышение затрат, обслуживающих ремонтные технологии. Требуются изменения в традиционных подходах к управлению и структуре обслуживания при решении проблем, выдвигаемых эксплуатацией нового оборудования.
При организации обслуживания и ремонта станков с ЧПУ возникают трудности, вызванные недостатком специалистов, знакомых со сложными электронными схемами и точной механикой, а также необходимостью при возникновении отказов в работе вызывать для ремонта специалистов раз-
315
личных служб завода: электроников из бюро обслуживания станков с ЧПУ электриков из службы главного энергетика и механиков из службы главного механика. В результате поиск неисправности может занять несколько часов, а иногда и дней, хотя на ее устранение требуются несколько минут.
Внастоящее время наметились следующие тенденции в обеспечении обслуживания и ремонта оборудования:
1) необходимость логистической поддержки и обслуживания приобретаемого оборудования вплоть до окончания срока его использования;
2) использование и развитие CALS-технологий в обеспечении производственной деятельности ремонтной службой предприятия;
3) определяющим критерием эффективности работ служб обеспечения ремонта технологического оборудования выступают: соответствие объекта по результатам ремонта техническим характеристикам; снижение временных издержек на ремонтные работы и снижение затрат на их обеспечение;
4) комплексный подход в обеспечении ремонта оборудования становится уделом специалистов новой формации, с менее четкими границами по специализации, но более высоким уровнем профессиональной подготовки.
Взаключении необходимо добиться повышение эффективности исполнения ремонтной службой машиностроительного предприятия своих функциональных задач путем разработки и внедрения новой структуры обслуживания и ремонта современного технологического оборудования, основанной на:
1) разработке и внедрения методов организации ТОиР на основе модели его эксплуатации.
2) разработке модели надежности современного оборудования;
3) обеспечении технически исправного состояния оборудования и его бесперебойной работы;
4) сокращении простоев оборудования и потерь в производстве, связанных с его ремонтом и неисправностью, снижения расходов на ремонт и техническое обслуживание.
Список литературы
1.Ревенко, Н.Ф. Экономика ремонта и обслуживания оборудования предприятий: учебник / Н.Ф. Ревенко, В.В. Семенов, А.Г. Схиртладзе. ‒ Старый Оскол: ТНТ, 2012. ‒ 456 с.
2.Еремин, М.С., Абрамов, И.В., Абрамов, А.И., Турыгин, Ю.В. Стратегия ремонта станков по техническому состоянию // Ремонт, восстановление, модернизация. ‒ №1, 2011. С. 20-24.
3.Абрамов, И.В., Турыгин, Ю.В., Никитин, Ю.Р. Модель эксплуатации оборудования на основе диагностирования технического состояния // Методы вычислительного экспериента в инженерной практике: Сб. научн. труд. – Ижевск: Ижевский механический институт, 1992.- Вып.3.- С. 119 – 124.
316
Martin Hradský, Bc. (Мартин Храдски), студент 1 курса магистратуры
Štollmann Vladimír, doc. Ing. CSc. PhD., доцент Технический университет в г. Зволен, Словакия
Проект водородной канатной установки для горных местностей
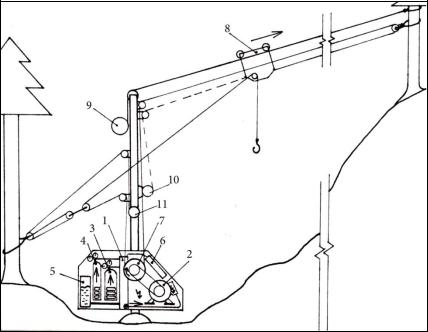
Лесные канатные дороги являются неотъемлемой частью лесозаготовительных и транспортных технологий там, где рубку леса невозможно осуществить другим способом в силу ряда технических причин. Особенно важно использование канатных дорог в горной местности. Данные дороги, помимо обеспечения доступа к зрелым лесам и логистики в концентрации биомассы, обеспечивают защиту почвы, улучшение эргономики рабочих, снижение общего негативного влияния горных работ на растительность [2], и в будущем могут стать одним из самых дешевых методов транспортировки леса [3], в частности, для очень крутых склонов. Обычные типы лесных канатных дорог зависят от внешнего источника энергии. На практике это означает, что расходуется энергия как на подъем, так и на торможение канатных дорог с грузом [1]. В результате это приводит к ненужному потреблению энергии в процессе торможения, величина которой напрямую зависит от значения потенциальной энергии груза [3].
Основной идеей проекта водородной канатной установки для горных местностей является поиск пригодного способа накопления и хранения энергии, вырабатываемой под действием силы тяжести на тележку с грузом, в фазе преодоления разности высоты, при транспортировке леса. Затем нужно использовать выработанную энергию для питания энергетической системы канатной установки. Энергия, создаваемая движением тележки с грузом по канату, можется накапливаться поразному. Однако, не все методы подходят, как с точки зрения долговечности, эффективности, строительно-технологической сложности и экологической безопасности [4]. В проекте водородной канатной установки для горных местностей используется в качестве аккумулятора водородный топливный элемент. Это дает ряд преимуществ, заключающихся в том, что это прямой топливный элемент, который позволяет преобразовать химическую энергию в электрическую, и наоборот, преобразовать химическую энергию в электрическую. Носителем химической энергии в данном случае является водород. Уникальность использования топливных элементов заключается в том, что емкость хранения электрической энергии в виде водорода, не определяется размером топливных элементов, а размером бака газа, который обеспечивает большую емкость хранимой энергии. Следует отметить, что образование водорода в топливном элементе основано на диссоциации дистиллированной воды, которая пригодна не только для получения чистого водорода, но и чистого кислорода. Эффективность преобразования энергии в топливных элементах сильно зависит от
317
чистоты газов. Эффективность преобразования энергиидля реакции водород-воздух составляет 40 %, а для водородно-кислородной реакции достигает 50 % [1].
Работа водородной канатной установки, с точки зрения энергетического баланса, делится на два этапа. Это фаза зарядки и фаза потребления.
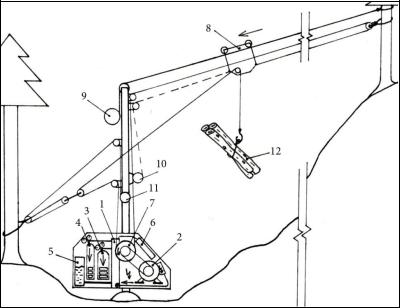
Фаза зарядки начинается в тот момент, когда тележка канатной установки втягивается в лес до определенной высоты и груз был поднят в транспортное средство. Спуск тележки с грузом активизирует блок управления зарядки. Мотор-генератор канатной установки используется в фазе зарядки, в то же время и как регулятор скорости или как тормоз. Поскольку необходимо, чтобы в полной мере использовать потенциальную энергию груза и выдерживать безопасную скорость канатной тележки, правильным выбором является использование мотор-генератора с управляемым магнитным полем. Фаза зарядки заканчивается в тот момент, когда груз с фуникулером не используют потенциальную энергию. Во время фазы зарядки, электрическая энергия обеспечивает в топливном элементе образование реактивных газов, которые непрерывно поступают на хранение в резервуар высокого давления. Эта фаза канатной установки LARIX 550 схематично показана на рис. 1.
Рис. 1. Фаза зарядки: 1 ‒ топливный элемент, 2 ‒ мотор-генератор, 3 ‒ водородный бак, 4 ‒ кислородный бак, 5 ‒ бак с дистиллированной водой, 6 ‒ регулятор, 7 ‒ канатный барабан, 8 ‒ канатная тележка, 9 ‒ барабан основного каната, 10
‒ барабан вспомогательного каната, 11 ‒ барабан буксировочного каната, 12 ‒ груз
318
Фазу потребления не возможно точно выделить, так как потребление может происходить параллельно с зарядкой. Это тот случай, например, при управлении зарядкой, когда большое магнитное поле достигается путем регулирования электрическими магнитами. Однако, в целом, эта фаза может быть определена как сумма энергии, необходимой для подъема фуникулера в положение, которое считается начальной фазой зарядки. Это значит, что подъем буксировочного тросса, перемещение каретки в лес и поднятие груза в транспортное положение. На протяжении стадии потребления, газы из резервуаров используются в топливном элементе, который вырабатывает электричество для привода канатной установки и заполняет бак с дистиллированной водой. Пример стадии потребления схематично показан на рис. 2.
Рис.2. Фаза потребления: 1 ‒ топливный элемент, 2 ‒ мотор-генератор, 3 ‒водородный бак, 4 ‒ кислородный бак, 5 ‒ бак с дистиллированной водой,
6 ‒ регулятор, 7 ‒ канатный барабан, 8 ‒ канатная тележка, 9 ‒ барабан основного каната, 10 ‒ барабан вспомогательного каната,
11 ‒ барабан буксировочного каната, 12 ‒ груз
Проект водородной канатной установки для горной местности в настоящее время находится в стадии проектирования и будет представлен в дипломной работе. Поэтому нет возможности привести более подробные результаты. В данной работе было уделено внимание, в основном, теку-
319
щей ситуации на рынке с топливными элементами, их производительности, цене, производителям, топливам, ссылкам на отдельные виды, их использование и возможности их применения. В рамках бакалаврской работы была разработана рабочая модель водородного топливного элемента. При проектировании данного объекта будут подробно рассмотрены возможности водородных топливных элементов в модели при разработке проекта водородной канатной установки предложенной концепции. Это будет необходимо для решения трех основных вопросов. Первый вопрос заключается в выборе соответствующей деятельности отдельных энергоблоков в зависимости от определенного веса, сопротивление троссовой системы, размеров грузовика, установки запаса энергии, производительности топливных элементов и мотор-генератора. Сюда можно включить соответствующее решение хранения газов в резервуарах, в связи с безопасностью и максимальной эффективностью системы. Второй вопрос представляет собой решение задачи энергетического баланса водорода фуникулера в зависимости от ее развертывания в той или иной местности рельефа, в отношении реального практического использования. Результат нужен для того, чтобы определить степень и пределы его использования для различных углов склона в зависимости от веса груза и длины маршрута. Существенное влияние на объем доступной энергии зависит от того, как перевозится груз (в полуприцепе или на полном буксире). Все эти результаты будут обработаны в виде различных графиков зависимостей. Последней группой вопросов является стоимость модели проекта водородной канатной установки для горных местностей. Они будут состоять из расчета стоимости закупки технических компонентов, включая производство специальных компонентов, осуществление расчетов, ожидаемых сроках производства, оценки интеллектуальной собственности и последующей оценки рентабельности инвестиций по отношению к модели. Результат проекта станет основой для создания модели водородной канатной горной установки в горных местностях, чтобы убедиться в достоверности предлагаемой теории.
Данная тема выполнена в рамках гранта VEGA 1/0931/13 при финансовой поддержке Министерства образования, науки, исследования и спорта Словацкой республики.
Список литературы
1.Melichová, Z. a kol. 2008. Základy elektrochémie. Banská Bystrica: Fakulta prírodných vied UMB, 2008. – 176 p. На словацком языке.
2.Štollmann,V., Slugeň, J. Lesnícke mechanizačné prostriedky. Skriptum, Zvolen: ES TU, 2009. P. 198. На словацком языке.
3.Štollmann, V., Ilčík, Š. Rekuperačné lanové zariadenia. Monografia, Zvolen: ES TU, 2008. – 77 p. На словацком языке.
4.Якимович, Б.А., Коршунов, A.И., Кузнецов, A.П. Теоретические основы кон-
структивно-технологической сложности изделий и структур-стратегий производственных систем машиностроения. – Ижевск: ИжГТУ, 2007. – 280 с.
320
А. В. Гусев, аспирант В. В. Закураев, кандидат технических наук, доцент
Новоуральский технологический институт национального исследовательского ядерного университета «МИФИ»
Результаты исследований деформационных параметров стружек и виброакустических характеристик процесса резания
Внашей работе [1] изучался характер и размеры образования элементарных объемов материала, возникающих в результате сдвиговых деформаций при стружкообразовании. Установлены физические причины достижения оптимальных режимов резания.
Анализ изменения относительных размеров ∆x/a≈1 показывает, что
диапазон оптимальных скоростей резания заключен между V1 и V2, при которых значения ∆x/a≈1, т.е. размеры сдвигаемых фрагментов по ширине и высоте примерно одинаковы. Объяснение этому явлению лежит в самой природе пластической деформации описанной в [2]. При равновеликих размерах ∆x/a работает механизм ротационной деформации (поворот зерен и частиц) на макроуровне, что является причиной улучшения процесса сдвиговых деформаций, а, следовательно, и обрабатываемости материала.
Вданной работе, с целью идентификации условий улучшения обрабатываемости материала и установления возможности контроля процесса резания, сделана попытка получения информационных параметров на основе изучения амлитудно-частотных и спектральных характеристик процесса.
Методика измерения сигналов вибродатчика и сигналов акустической эмиссии описаны в нашей работе. Подробный анализ полученных результатов приведен в [3].
Процесс стружкообразования по своей природе является дискретным и связан с возникновением мгновенно изменяющихся сил резания. Причем, это явление носит случайный характер. Для оценки подобных процессов используют спектральную плотность сигналов. На рис.1 приведены значения спектральной плотности вибросигналов, полученных в результате обработки на различных скоростях резания и подачах.
321
Зависимость G (спектральной плотности) от скорости резания
G,В^2/Гц
25
20
15
10
5
0
0,47 |
1,77 |
1,88 |
2,97 |
3,8 |
4,7 |
5,9 |
V, м/с
G,В^2/Гц
Зависимость G (спектральной плотности) от подачи резания 20 18 
 16 14 12 10 8 6 4 2
16 14 12 10 8 6 4 2 
 0
0 


0,075 |
0,125 |
0,15 |
0,2 |
0,3 |
0,43 |
0,6 |
|
|
|
S, мм/об |
|
|
|
Рис. 1. Графики зависимости спектральной плотности от скорости и подачи резания
Изменение спектральной плотности (G) вибро сигналов носит не монотонный характер. Имеются участки с низкими и высокими значениями амплитуд. Причин увеличения спектральной плотности колебаний может быть несколько. Одна из них ‒ совпадение частот сдвиговых деформаций стружкообразования и частот вынужденных колебаний, возникающих в технологической системе в результате воздействия различных факторов (колебания резца, подшипников шпинделя, наложение зубцовой частоты от зубчатых колес коробки скоростей).
Остановимся на анализе возникновения резонансных условий в технологической системе.
На рис. 2 приведены графики изменения относительных частот ωmax/ ωc в зависимости от скорости резания и рабочей подачи.
ωmax ‒ частоты, соответствующие максимальным значениям амплитуд в спектре колебаний;
ωc – частоты, соответствующие сдвиговым деформациям при стружкообразовании. ωc – частоты стружкообразования вычислены по параметрам
322

деформационных характеристик, приведенных в работе [3].
На этом же рисунке приведены значения спектральных плотностей, рассчитанных на каждой скорости резания.
Рис. 2. Графики зависимостей отношения и ωmax/ ωc графики спектральной плотности от изменения скорости и подачи
Анализ полученных данных свидетельствует о следующем:
Условия, близкие к резонансным, то есть совпадение частот сдвиговых деформаций элементов стружек и частот общего виброспектра, отмечают-
ся на скоростях 1,77 м/с и 3,88 м/с.(ωmax/ ωc≈1). Для этих же скоростей отмечается рост спектральной плотности G (график 2). Рост величины
спектральной плотности связан с увеличением значений амплитуд и частоты сигналов, отмеченных на АЧХ (рис. 3, 4).
323
А, В
|
Амлитудно-частотная характеристика процесса резания при |
|
|
различных скоростях |
|
2 |
V=0.47м/с |
|
|
||
1,8 |
V=1.77м/с |
|
1,6 |
V=1,88м/с |
|
V=2,97м/с |
||
1,4 |
||
V=3,8м/с |
||
1,2 |
||
V=4,7м/с |
||
1 |
V=5,9м/с |
|
0,8 |
|
|
0,6 |
|
|
0,4 |
|
|
0,2 |
|
|
0 |
|
1500 |
3500 |
5000 |
7000 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
1000 |
1200 |
1500 |
1800 |
2000 |
2200 |
2500 |
F, Гц |
||||
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 3. АЧХ процесса резания при различных скоростях
Амлитудно-частотная характеристика процесса резания при различных подачах
А, В
2,5 2 1,5 1 0,5 0
1500 |
3500 |
5000 |
7000 |
0 |
0 |
0 |
0 |
1000 |
1200 |
1500 |
1800 |
||||
|
|
|
|
|
F, Гц |
|
|
|
S=0.075 мм/об |
|
|
S=0.125 мм/об |
|
|
S=0.15 мм/об |
|
|
S=0.2 мм/об |
|
|
S=0.3 мм/об |
|
|
S=0.4 мм/об |
|
|
S=0.6 мм/об |
|
0 |
0 |
0 |
2000 |
2200 |
2500 |
Рис 4. АЧХ процесса резания при различных подачах
Аналогичная картина наблюдается и на рис. 2. Резонансные (околорезонансные) условия возникают при подачах 0,11‒0,15 мм/об и 0,57 мм/об. Рост спектральной плотности отмечается лишь при подаче 0,57 мм/об. Таким образом, гипотеза о возможности возникновения резонансных условий в технологической системе подтверждается. Причем усиление
324

этого явления наблюдается при более высоких скоростях резания и подачах.
Уточнение справедливости данной гипотезы требует дополнительных исследований. В частности необходимо рассмотреть поведение деформационных объемов и их связь с параметрами спектров виброколебаний.
Список литературы
1.Заявка на патент РФ №2012131289/02. Способ определения оптимальных режимов резания. Авторы: Гусев А.В., Закураев В.В.
2.Рыбин, В. В. Большие пластические деформации и разрушение металлов. М. Металлургия, 1986. – 224 с.
3.Гусев, А.В. К определению корреляции деформационных параметров и вибросигналов в процессе механической обработки. с.283. Автоматизация и прогрессивные технологии в атомной отрасли: Труды VI международной научнотехнической конференции (15 – 19 октября 2012 г.), – Новоуральск: Изд-во НТИ НИЯУ МИФИ, 2012. – 450с. с ил.
У. В. Зорина, аспирант Ижевский государственный технический университет
имени М. Т. Калашникова
Освойствах многомерных сигналов
вбазисе Виленкина – Крестенсона
Важным примером базиса для многих задач цифровой обработки сигналов спектральными методами служит класс комплексных экспоненциальных функций Виленкина – Крестенсона (В-К), управление свойствами которых осуществляется с помощью вариации основания используемой
системы счисления. |
|
|
|
На периодах N ns , |
n 2, |
s 1, |
существует дискретный базис В-К. |
Как отмечено в [1], на указанных периодах этот базис является обобщением базиса Фурье (случай s 1) и базиса Уолша (случай n 2 ). Естественным для базиса В-К оператором сдвига является n-ичный сдвиг. Это обстоятельство позволяет ввести в базисе В-К понятия и определения теории сложных дискретных сигналов, аналогичные существующим в базисе Фурье.
Пусть C |
N |
2 |
– линейное пространство комплекснозначных функций це- |
||||||
|
|
|
|
|
|
x x j1 , j2 , |
|
|
|
лочисленного |
|
аргумента |
j1 , j2 |
(сигналов), N- |
|||||
периодических |
по каждому |
аргументу, |
со скалярным произведением |
||||||
N 1 N 1 |
|
|
|
|
|
|
N, N периодиче- |
||
x, y x j1 , j2 |
y j1 , j2 . |
Единичным двумерным |
|||||||
j1 0 j2 0
325

ским
j |
|
, j |
|
|
1 |
|
2 |
|
|
|
|
j |
, |
|
1 |
|
1 |
|
|
|
N |
j |
|
|
|
1 |
|||
импульсом называется сигнал |
N j1 , j2 , |
равный единице, |
|
когда |
||||
делятся |
на N и |
нулю при |
остальных |
j , j |
2 |
(в частности, |
||
|
|
|
|
1 |
N j1 1, j2 |
1 , …, |
||
j2 1). |
Система |
сдвигов |
N j1 , j2 , |
|
||||
N 1, j2 |
N 1 образуют ортонормированный базис в C |
N |
2 , та- |
|||||
|
|
|
|
|
|
|
|
|
кой, |
что |
любой |
сигнал |
x |
допускает |
представление |
x j |
|
|
|
N 1N 1 |
x k ,l |
|
j |
|
|
l , |
, j |
2 |
|
N |
k , j |
2 |
|||||
1 |
|
|
|
1 |
|
|
||||
|
|
|
|
k 0 l 0 |
|
|
|
|
|
|
j |
, j |
2 |
Z. |
1 |
|
|
Дискретными функциями В-К назовем функции вида:
|
s |
k |
|
j |
|
s |
|
|
|
vk j exp |
2i |
|
|
|
|
k |
j |
, |
|
|
n |
n |
|
|
|||||
|
1 |
|
|
1 |
|
|
|||
|
|
|
|
|
|
|
|
||
N exp 2i / N k , j 0 : N 1,
а |
сигналы |
|
V( k ,l,a,b ) vk a vl ( b ) |
|||||||
a a |
s 1 |
,a |
s 2 |
,...,a |
0 |
, |
b b |
,b |
,...,b |
, |
|
|
|
n |
s 1 |
s 2 |
0 |
n |
|||
|
|
|
|
|
|
|
|
|
|
s 1 |
циями В-К второго рода, полагая t ,r s |
||||||||||
|
|
|
|
|
|
|
|
|
|
0 |
|
{ k ,a } |
{ l |
|
|
s |
||
|
n |
|
n |
назовем |
|||
t |
r |
|
|
|
|
|
|
,b } |
, k,l 0,1,... |
|
s |
||
|
дискретными
,N 1,
функ-
Сигналы a,b 0,1,...,N a,b Z.
Сигналы
V( k ,l,a,b ) |
определены |
на |
основном |
периоде |
1 . Далее продолжаются N-периодически на все целые |
||||
V( 0,0, , ),V( 0,1, , ),...,V( N 1,N 1, , ) |
образуют |
ортогональ- |
||
ный базис в |
C |
|
2 . |
При этом |
V( k ,l,a,b ) |
2 |
|
N |
|
||||||
|
|
|
|
|
|
|
|
k ,l { 0,1,...,N 1}. |
|
|
|
|
|
|
|
Базис V( 0,0, , ),V( 0,1, , ),...,V( N 1,N 1, , ) является
N |
2 |
при всех |
|
мультипликатив-
ным |
в |
том |
смысле, |
V k ,l,a,b V k' ,l' ,a,b V m,m' ,a,b , |
|||
что
где
при
m k k' n
и
k ,l,k' ,l' { 0,1,...,N 1}
m' l l'. n
|
Пусть в C |
N |
2 при N ns последовательность ортогональных базисов |
|||
H h k ,l,a,b |
|
, 0,1,...,s, так что |
|
|||
|
|
|
N 1 |
|
|
|
|
|
k ,l 0 |
|
|
||
h0 |
k ,l,a,b N a k N b l и hs k ,l,a,b vk a vl b . |
Сигналы |
||||
hv |
k ,l,a,b как элементы пространства CN 2 обозначим |
|
||||
hv k,l . hs k ,l,a,b |
|
N 1 N 1 |
|
|||
VN k , p1 VN l, p2 N a p1 |
N b p2 |
|||||
|
|
|
|
|
p1 0 p2 0 |
|
|
N 1 N 1 |
|
|
|
|
|
vk p1 |
N a p1 vl p2 N b p2 vk a vl b . |
|
||||
p1 0 p2 0
326

Для базисов H справедливо равенство
|
|
|
|
|
|
|
|
v 1 1 v 1 1 |
l ,q |
|
m,q |
|
|||||||
hv lNv p,mNv t |
|
||||||||||||||||||
n 1 |
v n |
2 |
v h0 p v 1 q1 ,t v q2 , |
||||||||||||||||
|
|
|
|
|
|
|
|
|
q1 0 |
q2 0 |
|
|
|
|
|
||||
p,t 0,1,...,N |
v |
1, l,m 0,1,..., |
v 1 |
1, v 1,...,s. |
|||||||||||||||
При каждом |
v 1,...,s 1 |
система сигналов hv k ,l,a,b образуют орто- |
|||||||||||||||||
гональный базис в C |
|
2 , |
при этом |
2 |
n |
2v |
при всех k ,l 0,1,...,N 1. |
||||||||||||
N |
hv |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Пусть в С |
|
|
|
|
при |
N n |
s |
|
еще одну последовательность ортогональных |
||||||||||
N |
2 |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
базисов |
|
|
|
|
|
N 1 |
, |
v 0,1,...,s, так, что |
|||||||||||
|
k ,l,a,b |
|
|
||||||||||||||||
|
|
|
|
|
|
k ,l 0 |
|
|
|
|
|
|
|
|
|||||
h0 hv
k ,l,a,bk ,l,a,b
N a k N b l и hs k ,l,a,b |
||
как элементы пространства C |
N |
2 |
|
|
|
v |
a v b . |
k |
l |
обозначим
Сигналы
hv k,l .
|
k ,l,a,b |
N 1 N 1 |
|
k , p |
V |
|
l, p |
|
|
|
a p |
|
|
b p |
|
|
|||
h |
|
V |
N |
N |
2 |
N |
N |
2 |
|||||||||||
s |
|
|
1 |
|
|
|
1 |
|
|
|
|||||||||
|
|
p 0 p |
2 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N 1 |
N 1 |
|
p |
|
|
|
|
a p |
v |
|
p |
|
|
b p |
|
|
|
|
|
a v b . |
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
v |
|
N |
|
N |
|
v |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
k |
|
|
1 |
|
|
|
|
|
1 |
|
l |
|
|
|
2 |
|
|
|
|
|
|
|
2 |
|
|
|
k |
|
l |
|
|
|
|
|
|
|
|||||||||||
|
p 0 p |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для базисов H справедливо равенство |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v 1 |
1 |
v 1 |
1 |
|
l ,q |
|
m,q |
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
lN |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
q , |
||||||||||||||||||
|
h |
|
p,mN |
|
t |
|
|
|
|
|
|
q ,t |
|
|||||||||||||||||||||||||||||||||||
|
v |
v |
|
|
|
1 |
v |
|
|
2 |
v h |
v 1 |
v |
|||||||||||||||||||||||||||||||||||
|
v |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
n |
|
|
0 |
|
|
1 |
2 |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q 0 |
q |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p,t 0,1,...,N |
v |
1, |
l,m 0,1,..., |
v 1 |
1, v 1,...,s. |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
При каждом |
v 1,...,s 1 |
система сигналов hv k ,l,a,b |
образуют орто- |
||||||||||||||||||||||||||||||||||||||||||||
гональный базис в C |
|
|
2 , |
при этом |
|
hv |
2 |
|
n |
2v |
при всех |
k ,l |
0,1,...,N 1. |
|||||||||||||||||||||||||||||||||||
N |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Пусть в |
С |
N |
2 |
при |
|
N ns |
|
еще одну последовательность ортогональных |
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
базисов |
|
|
|
|
|
|
|
|
|
N 1 |
|
, |
v 0,1,...,s, |
так, что |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
k ,l,a,b |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k ,l 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
0 k ,l,a,b N a k ,b l |
и |
|
s k ,l,a,b V k ,l,a,b vk a vl b . |
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
Справедливо для базисов |
|
|
|
равенство |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
v p v 1 l ,t v 1 m |
v 1 1 v 1 |
1 |
|
|
l ,q1 |
v |
|
m,q2 v |
0 |
q1Nv p,q2 Nv t , |
|
|
||||||||||||||||||||||||||||||||||||
|
n |
|
|
|
n |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q1 0 |
|
q2 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
l,m 0,1,..., v 1 1, |
p,t 0,1,...,Nv 1, v 1,...,s. |
v 0,0 , |
||||
|
|
При |
каждом |
v 1,...,s 1 |
система сигналов |
|
v 1,0 ,..., v N 1,N 1 образует ортогональный базис в СN 2 . |
||||||
|
v |
k ,l 2 |
n2v при всех k ,l 0,1,...,N 1. |
|
||
|
|
|
|
|
|
|
v 0,1 ,
При этом
327
|
|
Любой сигнал |
x C |
N |
2 |
можно разложить по ортогональному базису |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h |
|
k ,l,a,b |
|
|
при каждом v 0,1,...,s : |
|
x |
N 1N 1 |
h |
k ,l . Здесь |
||||||||||||||||
|
|
|
|
|
x k ,l |
|||||||||||||||||||||
|
|
|
|
N 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
|
|
|
|
||
v |
|
|
k ,l 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k 0 l 0 |
|
|
|
|
|
xv( k ) n |
2v |
x,hv k ,l . |
В частности, |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
N 1 N 1 |
|
|
|
|
|
|
|
|
|
l x k ,l , |
|
|
|
|
|
||||||||
x0 k ,l |
x j1 , j2 N j1 |
k , j2 |
k ,l 0,1,...,N 1. |
Рекур- |
||||||||||||||||||||||
|
|
|
j1 0 j2 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
рентная схема вычисления коэффициентов разложения: |
|
|
|
|
||||||||||||||||||||||
x |
k x k , |
k 0,1,...,N 1: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
lN |
|
|
|
|
|
|
1 |
n 1 |
n 1 |
lq |
mq |
|
|
|
pn q ,tn q |
|
, |
|
|
||||||
x |
p,mN |
|
t |
|
|
|
|
2 x |
|
|
|
|
||||||||||||||
1 |
2 |
|
|
|
|
|
1 |
|
2 |
|
|
|||||||||||||||
v |
|
1 |
|
|
|
|
|
n |
|
n |
|
v 1 |
|
|
1 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
n |
q 0q |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p,t 0,1,...,N |
1, |
1 |
|
l,m 0,1,...,n 1,
v s,s 1,...1, .
Эта схема быстрого пре-
образования В-К первого рода, связанное с прореживанием по частоте. При v s получаются разложения сигнала x по базису В-К:
x j |
|
|
|
N 1N 1 |
k ,l v |
j |
v j |
|
. |
, j |
2 |
x |
2 |
||||||
1 |
|
|
s |
k |
1 |
l |
|
||
|
|
|
|
k 0 l 0 |
|
|
|
|
|
Аналогично сигнал |
x можно разложить |
||
v 0,0 ,..., v N 1,N 1 при каждом |
|
||
|
N 1N 1 |
|
|
v 0,1,...,s : x yv k ,l v k ,l . Здесь |
yv |
||
|
k 0 l 0 |
|
|
енты |
разложения |
вычисляются |
по |
y k ,l |
x k ,l , k ,l 0,1,...,N 1; |
|
|
0 |
|
|
|
по ортогональному базису
n |
2v |
x, v k ,l .Коэффици- |
|
|
|||
|
рекуррентной |
схеме |
|
yv pn l ,tn m |
1 |
N 1 N 1 |
l ,q |
|
m,q |
|
q1N1 |
|
t , |
|||
|
|
n |
1 |
s n |
2 |
s yv 1 |
p,q2 N1 |
|||||
n |
2 |
|
|
|||||||||
|
|
q1 0q2 0 |
|
|
|
|
|
|
|
|
|
|
p,t 0,1,...,N |
1, |
1 |
|
l,m 0,1,...,n 1,
v s,s 1,...1, .
При условии
v s
полу-
|
N 1N 1 |
|
чается |
x j1 , j2 ys k ,l vk j1 vl j2 . То есть |
|
|
k 0 l 0 |
|
ys k ,l xs k ,l при всех |
k ,l 0,1,...,N 1. Получаем схему быстрого |
|
преобразования В-К первого рода, связанное с прореживанием по времени.
Сигналам x, y CN 2 сопоставим функцию взаимной n -корреляции:
N 1N 1 |
|
|
|
|
|
Rxyn x( j k ,i l ) |
y( k ,l ), |
j,i 0,1,...,N 1, |
|||
k 0 l 0 |
n |
n |
|
||
|
|
|
|
|
|
Функцию Rxxn назовем функцией n-автокорреляции сигнала x. 328
Рассмотрим ансамбль P, состоящий из m сигналов, заданных на мно-
жестве 0,1,...,N 1 |
при |
|
N ns . Пусть |
||||||||||||||||||
|
R n |
max |
R n j,i |
|
: x, y |
||||||||||||||||
|
|
||||||||||||||||||||
|
|
|
c |
|
|
|
|
|
xy |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
x,y P |
|
|
|
|
R |
|
|
|
|
|||||
|
|
|
|
|
|
R |
n |
max |
n |
j,i |
|||||||||||
|
|
|
|
|
|
|
a |
|
|
|
|
|
xx |
|
|||||||
|
R |
|
|
|
|
|
|
|
|
|
x P |
R |
|
|
|
|
|||||
|
n |
|
|
N 1 |
|
n |
|
||||||||||||||
|
|
2 |
|
|
|
|
|
|
2 |
|
|
2 |
|
|
|
||||||
Тогда |
c |
|
|
|
|
|
m |
1 |
|
a |
|
|
|
|
1. |
||||||
N |
2 |
|
N |
2 |
|
N |
2 |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Следствием этого неравенства при |
|||||||||||||||||||||
|
|
|
R n |
|
|
|
|
|
N 2 |
m 1 |
|
||||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
неравенство |
|
|
|
max |
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|||
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
N |
|
|
|
N |
m |
2N 1 |
||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||
x |
2 |
n |
2 |
для всех x P. Положим |
|
|
|||
P, |
x y, j,i 0 : N 1 , |
|||
: x P, |
j,i 1: N 1 . |
|||
n |
n |
n |
|
является |
Rmax Rc |
,Ra |
|||
Последние неравенства являются обобщениями на двумерный случай границ Сидельникова – Сарвате и неравенства Велча в базисе В-К [2].
Список литературы
1.Трахтман, А.М., Трахтман, В.А. Основы теории дискретных сигналов на конечных интервалах. М. : Сов. радио, 1975.
2.Машарский, С.М., Цветков, К.Ю. О взаимной корреляции дискретных сигналов в базисе Виленкина – Крестенсона // Spb. Math. Preprint 2003-09. 24 Dec 2003. 8 c.
Ю. В. Зубкова, старший преподаватель Ижевский государственный технический университет
имени М. Т. Калашникова
Экспериментальное исследование точности позиционирования робота
Исследование точности позиционирования робота в составе автоматизированного технологического комплекса (АТК) является актуальной задачей при повышенных требованиях к выполнению условий точности отработки рабочим органом манипулятора пространственной траектории
[1].
Для обеспечения заданной точности в процессе позиционирования рабочего органа манипулятора разработана обобщенная математическая модель, учитывающая кинематические и инерционные характеристики робота. Особенностью предложенной модели является анализ процесса позиционирования с учетом кинематических и динамических свойств системы и выбор соответствующего управляющего воздействия [2].
329
Для проверки разработанной модели проведено экспериментальное исследование процесса позиционирования выходного звена робота. Объектом исследования является положение выходного звена робота.
Цель исследования: проверка разработанной модели позиционирования выходного звена робота при различных режимах работы робота.
Задачи исследования: построить кинематическую и динамическую модели робота, провести планирование эксперимента, экспериментальное исследование точности позиционирования выходного звена робота с использованием разработанной модели и анализ полученных от внешнего измерительного устройства данных, определив погрешность положения выходного звена.
Врезультате анализа процесса позиционирования установлены значительные зависимости между скоростными и инерционными характеристиками робота и точностью, с которой он достигает заданную точку траектории. Поэтому для проверки модели целесообразно проведение натурного эксперимента.
Вкачестве основного оборудования выбран шестизвенный робот – манипулятор фирмы KUKA с напольным закреплением. В качестве внешнего измерительного устройства выбран электронный штангенциркуль (ШЦЦ-1) CALIPRO 150 с точностью измерений 0,01 мм.
Учитывая, что конструкция робота известна и траектория движения выходного звена строго детерминирована, проводим построение кинематической и динамической моделей системы. Анализ полученных моделей позволил определить ошибку позиционирования выходного звена робота. Величина ошибки позиционирования выходного звена в точке определялась численным методом на основании разработанной методики вычисления полной погрешности с учетом кинематической схемы робота [2].
Схема экспериментальной установки представлена на рис. 1. На монтажной площадке 1 выходного звена робота закреплен датчик положения 2, определяющий отклонения положения выходного звена от идеального положения на контактной площадке 3 исследуемой поверхности 4. Для оценки возникающих отклонений от заданного положения в измерительную цепь включен блок сравнения и вычислений 5, входящий в состав персонального компьютера 6. Для преобразования и усиления аналоговых сигналов, поступающих от датчика, в цифровые сигналы для обработки на ЭВМ используется блок усилителей и АЦП 7.
330
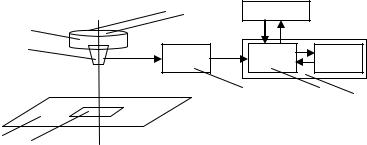
|
|
СУ ро- |
|
|
1 |
|
|
|
|
2 |
А |
П |
Ма |
|
|
|
|||
|
ЦП |
К |
тем. |
|
|
|
7 |
6 |
5 |
4 3
Рис. 1. Схема экспериментальной установки для исследования точности позиционирования выходного звена робота
Модель идеальной траектории задается в глобальных координатах роботу с пульта дистанционного управления (ПДУ). Для этой траектории, состоящей из i-точек, строится кинематическая и динамическая модели робототехнической системы. Начиная с первой точки, робот начинает движение по траектории в режиме test (тестовый) с номинальной скоростью для всех звеньев, причем текущие координаты точки определяются собственной системой управления робота. Перемещение в следующую (i+1)-ую точку траектории осуществляется согласно алгоритму:
1.Определяется величина полной погрешности механической части робота в данной точке.
2.С учетом полученной величины определяются координаты следующей точки.
3.Выходное звено робота по заданной программе перемещается в эту точку.
4.При достижении точки определяются актуальные координаты точки
спомощью системы управления робота, и одновременно происходит измерение датчиком действительного положения выходного звена.
5.Проводится анализ полученных данных, и при незначительном расхождении результатов делается вывод об обеспечении заданной точности позиционировании робота.
6.При получении данных, когда условие обеспечения точности ложно, делается вывод о необходимости корректировки положения для следующей точки с учетом показаний датчика.
Нужно отметить, что датчиком положения ШЦЦ-1 проводится только внешний контроль за действительным положением выходного звена робота. Обеспечение заданной точности позиционирования выходного звена робота осуществляется на основании предложенной модели процесса позиционирования.
Проведено две серии натурных экспериментов. В первой серии экспериментов определены текущие положения выходного звена робота без
331
применения предложенной модели. Во второй серии экспериментов была использована модель учета кинематических характеристик робота. В каждой серии было проведено по два эксперимента для двух точек траектории. Результаты экспериментального исследования приведены на рис. 2.
На основании полученных от датчика данных построены графики (рисунок 2), отражающие отклонения выходного звена робота от идеального положения без использования предложенной модели (а) и с ее применением (б).
|
-0,20 |
|
|
|
|
|
|
|
|
|
номер точки |
|
|
|
|
|
|
|
|
|
|
|
|
|
-0,25 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
-0,30 |
|
|
|
|
|
|
|
|
|
|
|
-0,35 |
|
|
|
|
|
|
|
|
|
а |
|
-0,40 |
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
|
|
|
|
|
|
-0,45 |
|
|
|
|
|
|
|
|
|
|
мм |
-0,50 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 2. Исследование точности позиционирования выходного звена:
а– без использования предложенной модели;
б– с использованием предложенной модели
При обработке результатов экспериментов использовались методы математической статистики. Было определено среднее значение отклонения от номинального значения положения, которое составило для эксперимента 1 (график а) ‒0,37 мм, для эксперимента 2 (график б) ‒0,29 мм. Таким образом, среднее значение отклонения для эксперимента 2 уменьшилось с ‒0,37 мм до ‒0,29 мм, то есть на 0,08 мм, что является положительным эффектом от использования модели. Кроме того, было определено среднее квадратическое отклонение величины для двадцати измерений. Для эксперимента 1 оно составило 0,0675 мм, для эксперимента 2 ‒ 0,0075 мм. В результате применения разработанной модели улучшилась стабильность процесса позиционирования выходного звена, о чем свидетельствует уменьшение величины среднего квадратического отклонения с 0,0675 мм до 0,0075 мм, что доказывает эффективность предложенного подхода.
Проведенный натурный эксперимент позволил выполнить проверку разработанной математической модели, в результате чего была получена более полную картину процесса позиционирования выходного звена робота при заданных режимах с учетом факторов, влияющих на точность позиционирования в реальном масштабе времени.
332
Список литературы
1.Подураев, Ю.В. Мехатроника: основы, методы, применение [Текст] / Ю.В. Подураев. – 2-е изд., стер. – М.: Машиностроение, 2007. – 256 с.
2.Турыгин, Ю.В. Исследование кинематической погрешности в передаточных механизмах мехатронной системы [Текст] / Ю.В. Зубкова, Д. Мага // «МЕ- ХАТРОНИКА-2012»: сб. статей. - Прага, 2012. - С. 351-354.
А. И. Кленов, магистрант Ю. Л. Караваев, старший преподаватель
С. А. Трефилов, кандидат технических наук, доцент Ижевский государственный технический университет
имени М. Т. Калашникова
Лабораторный макет для исследования алгоритмов управления систем с изменяющимися инерционно-массовыми нагрузками
В данной работе представлен лабораторный макет инерционного движителя, позволяющего производить эксперименты по алгоритмам управления для систем с изменяющимися инерционно-массовыми нагрузками.
Исследование данных алгоритмов является актуальным в области робототехники и мехатроники, так как автоматические системы различных технологических машин функционируют в условиях изменяющихся инерционно-массовых нагрузок [1], что необходимо учитывать при управлении подобными устройствами.
Для исследования алгоритмов управления разработана лабораторная установка – колесо с инерционным движителем. Данная лабораторная установка представлена на рис. 1.
Рис. 1. Лабораторная установка – колесо с инерционным движителем.
Лабораторная установка состоит из рамы (рис 1.А), инерционного движителя (рис 1.Б). Под инерционным движителем в данной работе подразумевается двигатель постоянного тока с насаженным на вал маховиком.
333

Рама данной лабораторной установки выполнена из двух алюминиевых дисков, соединенных между собой втулкой. Данная конструкция позволяет уменьшить трение с соприкасающейся поверхностью.
Причиной движения центра масс платформы являются не силы трения между соприкасающимися поверхностями, а неуравновешенные силы инерции, возникающие в момент изменения угловой частоты вращения маховика [2], [3]. То есть для придания движения данной установке необходимо управлять изменением ускорения системы двигатель-маховик. Поэтому параметры маховика (масса и геометрические размеры) в данной задаче имеют определяющее значение (чертеж маховика представлен на рис. 2), так как он придает инертность нагрузке двигателя. При выборе формы маховика мы исходили из следующих критериев:
1.Минимальный вес для облегчения конструкции и снижения консольной нагрузки на подшипник вала двигателя;
2.Наибольший момент инерции.
Рис. 2. Чертеж маховика |
|
|
Рис. 3. Схема скоростей |
Рассмотрим процесс движения колеса. |
|
|
|
При вращении маховика с ускорением |
|
1 |
происходит изменение кине- |
|
|
|
тического момента вращения. Кинетический момент тела равен:
|
|
L I ω |
|
|
|
. |
|
Поскольку ε |
ω |
, |
|
t |
|||
|
|
Следовательно |
L |
I ω |
1 |
1 |
|
|
|
Таким образом, возникает момент сил:
(1)
|
M1 |
|
L |
|
I1 |
|
ω |
I1 |
ε1 |
|
(2) |
|
|
1 |
1 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
t |
|
|
|
t |
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для системы (колесо и инерционный движитель) |
M 0 |
|
||||||||||
|
|
|
M1 |
|
M 2 |
M тр , |
|
|
|
(3) |
||
где: |
M1 ‒ момент вращения маховика; |
|
M 2 ‒ момент вращения колеса; |
|||||||||
M тр |
‒ момент трения качения. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
334 |
|
|
|
|
|
|
|
|

Момент трения качения равен:
M тр f N |
, |
(4) |
|
|
где: f ‒ коэффициент трения качения; |
ная N mgсист |
N
‒ прижимная сила, рав-
Подставив выражения (2) и (4) в (3), получаем, что кинетический мо-
мент маховика ( I1 ление сил трения (
|
1 |
|
|
f |
|
) расходуется на вращение колеса (
N )
I |
|
|
I |
|
|
|
f N |
, |
|
1 |
1 |
|
2 |
|
2 |
|
|
|
|
|
|
|
I |
2 |
|
ε |
2 |
|
) и преодо-
(6)
где: I1 ‒ момент инерции маховика и ротора двигателя, относительно оси проходящей через ось вращения маховика; 1 ‒ угловое ускорение махо-
вика и ротора двигателя; I 2 ‒ момент инерции колеса, относительно оси проходящей через точку контакта колеса с поверхностью (точка А рису-
нок 3);
|
2 |
|
‒ угловое ускорение колеса.
Из математической модели следует, что задача управления данного механизма сводиться к задаче управления двигателем по ускорению с инерционной нагрузкой, схема угловых скоростей представлена на рис. 3.
Моделирование данного лабораторного стенда проведено в среде «Универсальный механизм», изображение модели представлено на рис. 4.
Рис. 4. Модель лабораторного макета в среде «Универсальный механизм»
При моделировании задавался закон вращения маховика, рис. 5.А и 6.А, а на выходе мы получали закон изменения координаты центра масс колеса (кривая 1, рис. 5.Б и 6.Б) и скорость центра масс (кривая 2, рис. 5.Б и 6.Б) соответственно.
Рис. 5. Результат моделирования при экспоненциальном законе изменения вращения маховика.
335
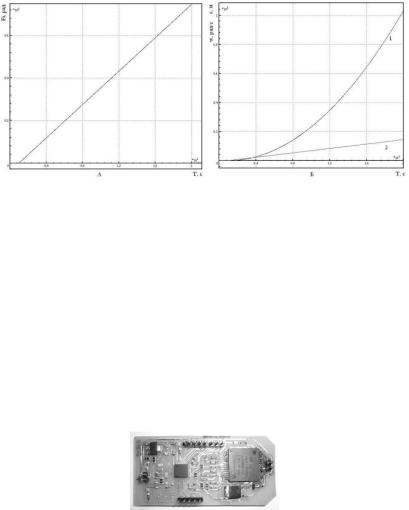
Рис. 6. Результаты моделирования при параболическом законе изменения вращения маховика.
В первом случае (рис. 5.А и 5.Б), законом изменения вращения маховика определен как экспоненциальный. В связи с тем, что данная система
движется при условии
I |
1 |
|
|
1 |
|
I |
|
|
|
|
|
2 |
2 |
f N
, мы получаем перемещение
системы (со 2 по 7 с). Во втором случае (рис. 6.А и 6.Б), закон изменения
вращения маховика определен как параболический |
F t 2 |
, где |
|
i |
|
Fi
2рад
.
Результаты моделирования показывают, что при параболическом изменении закона изменения вращения маховика мы получаем линейное увеличение центра масс системы.
Для управления данным лабораторным стендом, разработано микропроцессорное устройство управления двигателем постоянного тока. Устройство управления колесом на инерционном движителе представлено на рис. 7.
Рис. 7. Устройство управления колесом на инерционном движителе.
Был проведен ряд испытаний данной лабораторной установки. Эксперимент проводился на мраморной поверхности с коэффициентом трения качения равен 2,1 мм. На вход системы подавались такие же управляющие воздействия, которые представлены в моделировании. Различие между экспериментальными данными и результатами моделирования составляют: по перемещению ±5 % и по скорости системы ±8 %. Данные отклонения объясняются наличием погрешности – неравномерность коэффициента трения по всей поверхности в связи с неровностью поверхности; в
336

модели идеальное распределение массы, а в реальности центр масс не в центре и осевые моменты инерции макета не равны.
Испытания натурного образца лабораторной установки на основе инерционного движителя показали ее работоспособность и применимость для исследования алгоритмов управления системами с изменяющимися инерционно-массовыми нагрузками.
Далее на основе полученных данных будут проводиться исследования движения системы со смещенным центром масс.
Список литературы
1.Крутько, П.Д. Управление исполнительными системами роботов. – М.: наука, 1991. – 336 с.
2.Шипов, Г.И. Модели торсионных движителей в России и за рубежом «Академия Тринитаризма», М., Эл № 77-6567, публ.13312, 15.05.2006
3.Толчин, В.Н. Инерцоид. Силы инерции как источник поступательного движения. - Пермь, Кн. изд-во, 1977 г.
А. В. Князев, магистрант П. А. Ушаков, доктор технических наук, профессор
Ижевский государственный технический университет имени М. Т. Калашникова
Сравнительный анализ характеристик фрактального параллельного колебательного контура
Теория фракталов рассматривает вместо целочисленных мер ‒ дробные и базируется на новых количественных показателях в виде дробных размерностей D и соответствующих фрактальных сигнатур.
С появлением фрактальных радиоэлементов стало возможным создание на их основе устройств, решающие уравнения дробного порядка. Так с помощью фрактальной емкости исследованы аналоговые интеграторы, дифференциаторы и ПИД ‒регуляторы дробного порядка.
Импеданс фрактальной емкости характеризуются выражением вида:
Z p 1/ C p ,
где С С R фрактальная емкость, С – полная емкость системы, R –
R фрактальная емкость, С – полная емкость системы, R –
полное сопротивление системы, 0 < α < 1.
В работе [1] показана возможность получения фрактальной индуктивности с использованием гиратора нагруженной на фрактальную емкость.
Таким образом, имея фрактальную емкость и индуктивность возможно создание фрактального параллельного колебательного контура. Общее сопротивление фрактального параллельного колебательного контура получено [2], найдя общее сопротивление параллельно включенных фрак-
337
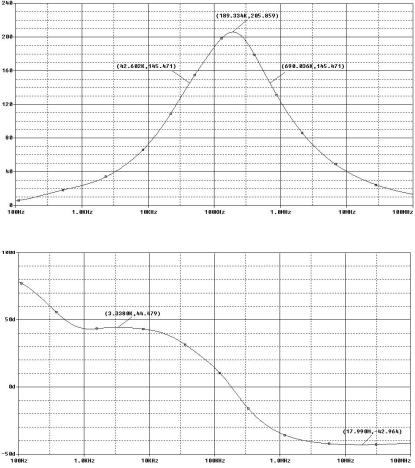
тальных индуктивности и емкости.
Результаты моделирования фрактального параллельного колебательного контура в программе Matlab показали [2], что характеристики колебательного контура зависят от коэффициентов α и β при неизменных значениях фрактальной емкости и фрактальной индуктивности.
Сравнительный анализ в программе OrCAD действительно показал, что характеристики колебательного контура зависят от коэффициентов α и β. На рис. 1 и рис. 2 показаны графики АЧХ и ФЧХ фрактального параллельного колебательного контура промоделированные в OrCAD, а на рис. 3 и рис. 4 графики АЧХ и ФЧХ исследованные в Matlab при коэффициентах α и β равной 0,5.
Рис. 1. АЧХ фрактального параллельного колебательного контура при α и β равной 0,5
Рис. 2. ФЧХ фрактального параллельного колебательного контура при α и β равной 0,5
338

Рис. 3. АЧХ фрактального параллельного колебательного контура при α и β равной 0,5
Рис. 4. ФЧХ фрактального параллельного колебательного контура при α и β равной 0,5
Из рис. 1 видно, что частота резонанса практически совпадает с частотой резонанса на рис. 3.
Из полученных графиков следует также, что добротности контура оказываются небольшими.
Поэтому для увеличения добротности параллельно контуру подключим отрицательное сопротивление и получаем контур с большим значением добротности. Зависимость частоты резонанса от коэффициентов α и β остается та же самая. Значения отрицательного сопротивления подбирается приблизительно равным сопротивлению контура на частоте резонанса без отрицательного сопротивления.
339
Рис. 5. АЧХ фрактального параллельного колебательного контура при α и β равной 0,5 с отрицательным сопротивлением
Рис. 6. ФЧХ фрактального параллельного колебательного контура при α и β равной 0,5 с отрицательным сопротивлением
Сравнительный анализ показал, что, используя фрактальную индуктивность и фрактальную емкость, возможно создание колебательного контура, характеристики которого зависят от коэффициентов α и β.
Список литературы
1. Ушаков, П.А., Князев, А.В. Фрактальные реактивные элементы // Материалы XVIII Международной научно-технической конференции «Информационные системы и технологии ИСТ-2012, V Международного форума информационных технологий», (20-го апреля 2012 г., Н.Новгород), Н.Новгород: ННГТУ, 2012.
340
2. Ушаков, П.А., Князев, А.В. Исследование характеристик фрактального параллельного колебательного контура // Материалы II Всероссийской научнотехнической конференции студентов, аспирантов и молодых ученых «Измерения, контроль и диагностика – 2012», (15-го мая 2012 г., Ижевск), Ижевск: ИжГТУ имени М.Т. Калашникова, 2012.
М. О. Князев, магистрант П. А. Ушаков, доктор технических наук, профессор
Ижевский государственный технический университет имени М. Т. Калашникова
Сравнительный анализ ПИД-регулятора целого и дробного порядков
всистеме ORCAD
Внастоящее время ПИД-регулятор целого порядка относится к наиболее распространенному типу регуляторов. Известно, что такие ПИДрегуляторы отличаются простотой построения и промышленного использования, наглядностью функционирования и низкой стоимостью [2].
Вто же время с появлением фрактальной геометрии стало ясно, что реальные физические процессы, происходящие в природе и в искусственных технических системах и средах, представляют собой динамические системы дробного порядка, математическими моделями которых являются дифференциальные уравнения дробного порядка. Поэтому для аналогового моделирования объектов и процессов с дробной динамикой, для управления этими объектами и процессами необходимы интегрирующие
идифференцирующие устройства соответствующего дробного порядка. В основном интегрирующие и дифференцирующие устройства используются для создания ПИД-регуляторов дробного порядка в системах автоматического управления [3].
Таким образом, целью работы является сравнить ПИД-регуляторы целого и дробного порядков по известным требованиям к регулировочной характеристике и модели управляемого объекта в системе схемотехнического моделирования ORCAD.
1. Общие сведения о ПИД-регуляторах целого и дробного порядков.
ПИД-регулятор дробного порядка (ПИ Д -регулятор, в иностранной литературе PI D -регулятор) был предложен как обобщение ПИДрегулятора с интегратором вещественного порядка и дифференциатором вещественного порядка . Передаточная функция такого регулятора в
плоскости комплексной частоты р имеет вид [1]: |
|
|||||||
С p |
U p |
|
K |
|
T p T p , (λ, δ > 0) |
(1) |
||
E p |
п |
|||||||
|
|
и |
д |
|
||||
|
|
|
|
|
|
|||
где Кп – константа пропорциональности, Ти – константа интегрирования, а Тд – константа дифференцирования.
341

Внутренняя структура ПИ Д -регулятора (рис. 1) похожа на структуру классического ПИД-регулятора и также содержит параллельное соединение трех звеньев: пропорционального, интегрирующего и дифференцирующего.
Рис. 1. Структура ПИ Д -регулятора
Передаточная функция (1) соответствует во временной области дифференциальному уравнению дробного порядка вида
u t
K |
e t T |
D e t T |
D e t |
|
п |
и0 |
t |
д0 |
t |
,
(2)
где
Dt
и
Dt
обозначение соответственно операторов дифференциро-
вания порядка и интегрирования порядка .
При = 1 и = 1, мы получим классический ПИД регулятор.
ВПИ Д -регуляторе большее число переменных и, очевидно, это должно соответствовать расширению возможностей настройки регулятора для решения различных задач управления.
2. Расчет ПИД-регулятора целого и дробного порядков
Воспользуемся методикой расчета регуляторов, описанной в [3].
Вкачестве примера рассмотрим систему управления, передаточная функция которой описывается выражением:
T p |
|
1 |
|
, |
(3) |
1,7 |
|
0,9 |
|||
|
0,6 p |
1 |
|
||
|
2 p |
|
|
На основании (3) можно записать: a0 = 1, a1 = 0,6, a2 = 2, α = 1,7,
β = 0,9.
Пусть заданы следующие параметры регулировочной характеристики:
1)Статическая ошибка Et = 5,0%.
2)Перерегулирование b = 0,4.
3)Коэффициент затухания ξ = 5.
2.1Расчет ПИД-регулятор дробного порядка 2.1.1 Определение коэффициента К Для задания К можно использовать соотношение
Et |
|
1 |
100% . |
(4) |
|
|
|
||||
a0 |
K |
||||
|
|
|
Подставив соответствующие значения в (4) получим K 20 . 2.1.2 Определение параметров Ти, λ, Тд, δ.
Заданному перерегулированию и коэффициенту затухания соответ-
342

ствует пара комплексно-сопряженных полюсов:
|
p1,2 b j . |
Найдем пару комплексно-сопряженных корней |
|
уравнения |
р1,2 2 j5. |
(5)
характеристического
Характеристическое уравнение системы управления с замкнутой петлей обратной связи может быть получено исходя из известных передаточных функций управляемого объекта и ПИ Д -регулятора:
|
a2 p |
|
a1 p |
|
Tи p |
|
Tд p |
|
a0 K 0 . |
|
|
(6) |
|
|
|
|
|
|
|
||||||
Характеристическое уравнение (6) с учетом (4,5) примет вид: |
|
|
||||||||||
1,7 |
|
|
0,9 |
|
|
|
|
|
|
1 20 |
0 |
(7) |
2 2 5 j |
0,6 2 5 j |
TD 2 5 j |
TI 2 5 j |
|||||||||
Уравнение (7) содержит четыре неизвестных, тогда как может быть разрешено только относительно двух. Поэтому для определенности положим = 0,2 и Tи = 30. Варьируя K и Tи, остановимся на значениях, при которых = 1,05 и Тд = 2,215.
Окончательно примем К = 20; Tи = 30; = 0,2; Тд = 2,215; = 1,05
2.2 Расчет ПИД-регулятор целого порядка Воспользуемся той же методикой, что и в п.2.1 с учетом того, что
ПИД-регулятор целого порядка частный случай при = 1 и = 1 ПИДрегулятора дробного порядка.
2.2.1 Определение коэффициента К. |
|
Подставив соответствующие значения в (4) получим |
K 20 . |
2.2.2 Определение параметров Ти, λ, Тд, δ.
Найдем пару комплексно-сопряженных корней характеристического уравнения р1,2 2 j5.
Характеристическое уравнение (6) с учетом (4) и (5) примет вид:
2 2 5 j 1,7 0.6 2 5 j 0,9 T |
2 5 j T |
2 5 j 1 20 0 . (8) |
D |
I |
|
Окончательно примем К = 40; Tи = 34; Тд = 1,857.
3. Схемотехническое моделирование в системе ORCAD.
ПИД-регулятор целого порядка состоит из интеграторальной, дифференциальной и пропорциональной составляющих, построенных на операционном усилителе. Для выбора номиналов элементов воспользуемся следующими соотношениями:
K |
R5 |
, |
|
(9) |
R1 |
|
|||
|
|
|
|
|
Ti C2 R4 |
, |
(10) |
||
Td R7 C1, |
(11) |
|||
В соответствии с расчетами соберем схему электрическую принципиальную для ПИД-регулятора целого порядка (рис. 2).
343
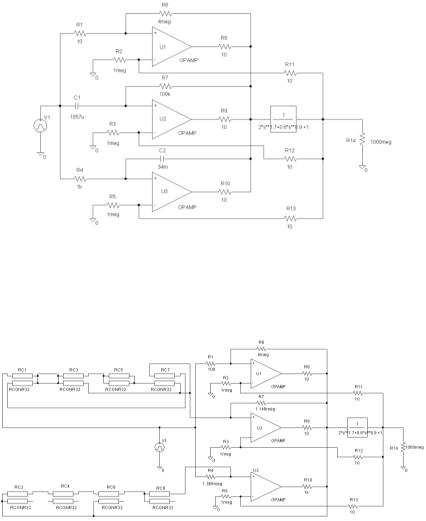
Рис. 2. ПИД-регулятор целого порядка схема электрическая принципиальная
Чтобы получить ПИД-регулятор дробного порядка (рис. 3) необходимо заменить конденсаторы в традиционных схемах интеграторов и дифференциаторов на двухполюсники, ФЧХ входного импеданса которого в ограниченном диапазоне частот имеет постоянную фазу отличную от 0 и 90° [3].
Рис. 3. ПИД-регулятор дробного порядка схема электрическая принципиальная
В свою очередь, для синтеза двухполюсников необходимо воспользоваться критерием синтеза устройств дробного интегрирования дифференцирования (ДИД) с вещественными, мнимыми и комплексными порядка-
ми при β = 0 [3].
В нашем случае с учетом того, что ФЧХ двухполюсника можно определить как ( ) / 2 соответственно для λ=0,2 получим 18 , а для
δ=0,05 ‒ 4,5 . Далее необходимо синтезировать двухполюсники на
344
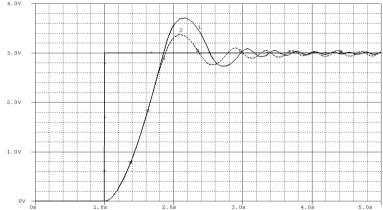
основе RC-ЭРП (RC-элемент с распределенными параметрами) [3]. Затем полученными двухполюсниками заменим конденсаторы интегратора и дифференциатора ПИД-регулятора целого порядка.
Результаты моделирования ПИД-регуляторов представлены на рис.4.
Рис. 4. Переходные характеристики систем управления: 1 – с ПИД-регулятором, 2 ‒ с ПИ Д -регулятором
Полученные результаты (рис. 4) показывают превосходство ПИ Д - регулятора над ПИД-регулятором целого порядка. Появление новой элементной базы, элементы которой будут в виде законченных узлов, позволит ПИД-регуляторам дробного порядка найти широкое применение в системах автоматического регулирования.
Список литературы
1.Petraš, I., Podlubny, I., O’Leary, P., Dorčak, Ĺ., Vinagre, B.M. Analogue Realization of Fractional Order Controllers. – Fakulta BERG, TU Košice. 2002. – 84 p.
2.Денисенко, В. В. ПИД-регуляторы: принципы построения и модификации
[Текст] / В.В. Денисенко // Современные технологии автоматизации. – 2006. –
№4. – С. 66-74.
3. Ушаков, П.А. Методы анализа и синтеза многослойных неоднородных RCэлементов с распределенными параметрами и устройств на их основе [Текст]: автореф. дис. на соиск. учен. степ. д-ра техн. наук (05.13.05) / Ушаков Петр Архипович. – Ижевск, 2009. – 35 с.
345
П. Н. Кузнецов, магистрант
А. И. Абрамов, кандидат технических наук Ижевский государственный технический университет имени М. Т. Калашникова
Распознавание знаков ограничения скорости дорожного движения при помощи искусственной нейронной сети
Автоматическое распознавание дорожных знаков может быть использовано в системах помощи водителю, при производстве навигационных карт, а в дальнейшем, в автоматизированных системах управления автомобилем, который передвигается без участия человека.
При решении задач классификации и распознавания образов, в частности, графически представленных символов [1, 2], сейчас успешно применяются алгоритмы машинного обучения с использованием нейронных сетей. Типов нейронных сетей существует довольно много, но наиболее распространенной нейросетевой моделью является классическая полносвязная нейронная сеть [3].
В данной статье представлено описание алгоритма распознавания шести знаков ограничения скорости дорожного движения (30, 50, 60, 70, 80, 100 км/ч) при помощи нейронной сети, проведен анализ влияния структуры ПНС и передаваемых для обучения признаков на эффективность распознавания.
1. Предобработка изображений.
Изображения для обучения и тестирования нейронной сети были сделаны при помощи установленной в автомобиле камеры. Недостающие снимки были взяты из свободно распространяемой базы данных немецких знаков дорожного движения [4].
Все дорожные знаки ограничения скорости имеют круглую форму и контур красного цвета, это используется в работе для определения присутствия/отсутствия знака на изображении.
Начальное изображение представлено в цветовом пространстве RGB в виде матрицы размерностью m×n×3, каждый элемент которой определяет цвет соответствующего пикселя изображения.
Анализируя одновременно три составляющие цвета пикселей, согласно экспериментальным данным, описанным в работах [5, 6, 7], производился поиск областей красного цвета на изображении, которые маркировались белым цветом; все остальные пиксели маркировались черным.
На рис. 1 представлены результаты выделения красных областей на изображении.
346
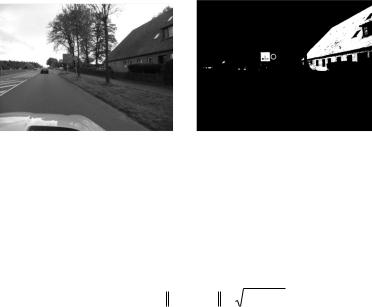
а б Рис. 1. Выделение красного цвета на изображении: а ‒ исходное изображе-
ние, б – изображение после преобразования
На полученном изображении производилось выделение границ объектов при помощи метода с использованием оператора пространственного дифференцирования Собеля [8], так как он обладает наилучшей реакцией на ступенчатый перепад.
|
|
Формирование градиентного изображения |
|
|
g(x, y) |
производилось по |
||||||||||||||||||||||||||||||||||
следующим правилам [8]: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
g( x, y ) f ( x, y ) |
|
|
d |
|
2 |
d |
|
2 |
, |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
di |
|
|
f ( x, y ) Hi |
|
|
3 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
f ( x j 2, y k 2 ) hjk ,i 1,2, |
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
h |
|
|
h |
|
h |
|
|
|
j 1 |
k 1 |
1 |
|
|
|
|
|
|
|
|
h |
|
|
h |
|
h |
|
|
|
||||||
|
|
|
|
|
|
1 |
|
1 |
1 |
|
1 |
0 |
|
|
|
|
|
|
|
|
2 |
|
2 |
2 |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
1 1 |
|
1 2 |
1 3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 1 |
|
1 2 |
1 3 |
|
|
||||||
H |
|
H |
|
|
h |
1 |
|
h |
1 |
h |
1 |
|
2 |
0 |
2 |
,H |
|
H |
|
|
|
|
h |
2 |
|
h |
2 |
h |
2 |
|
||||||||||
1 |
x |
|
|
|
|
|
|
|
|
|
2 |
y |
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
2 1 |
|
2 2 |
2 3 |
|
|
0 |
|
|
|
|
|
|
|
2 1 |
2 2 |
2 3 |
|
||||||||||||||||||
|
|
|
|
|
|
h |
|
1 |
|
h |
1 |
h |
1 |
|
|
1 |
1 |
|
|
|
|
|
|
|
|
h |
2 |
|
h |
2 |
h |
2 |
|
|
||||||
|
|
|
|
|
|
|
|
3 1 |
|
3 2 |
3 3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 1 |
3 2 |
3 3 |
|
|
|||||||
|
1 |
|
|
2 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
0 |
|
|
|
0 |
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
1 |
2 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где |
|
f ( x, y ) |
|
‒ |
исходное изображение, d1 |
и |
d2 |
‒ два изображения, где |
||||||||||||||||||||||||||||||||
каждая точка содержит приближенные производные по X и по Y, H1 и |
||||||||||||||||||||||||||||||||||||||||
H2 ‒ пара масок с коэффициентами Собеля для вычисления приближен- |
||||||||||||||||||||||||||||||||||||||||
ных производных по X и по Y, |
операция |
|
|
в формуле для вычисления d1 |
||||||||||||||||||||||||||||||||||||
и |
d2 |
обозначает двумерную операцию свертки. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
Результаты выделения границ с применением оператора Собеля пред- |
||||||||||||||||||||||||||||||||||||||
ставлены на рис. 2. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
347
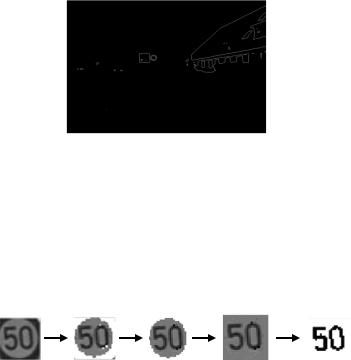
Рис. 2. Выделение границ между объектами на изображении методом с использованием оператора Собеля
Для выделения области знака дорожного движения на изображении производился поиск эллипсов (близких к кругу) используя преобразование Хафа [9].
По координатам эллипса на изображении, полученным после преобразования Хафа, производилось вырезание области знака дорожного движения из начального изображения.
Вырезанная область знака ограничения скорости и дальнейшая обработка изображения представлены на рис. 3.
Рис. 3. Процесс обработки изображения
Красные пиксели маркировались белым цветом, для удаления шумов применялся ряд морфологических фильтров (операции сужения и расширения), после чего производилась операция бинаризирования.
2. Выделение признаков с изображений.
Для обучения и проверки нейронной сети использовались пиксели области изображения со знаком дорожного движения, а также дополнительные признаки, полученные с изображения – признаки районирования (Zoning) и моменты Цернике (Zernike moments), описанные в работах
[9,10].
При районировании (разбивке на зоны) изображение условно разбивалось на области и в каждой области подсчитывалось количество белых пикселей.
Для выделения инвариантных к вращению особенностей, рассчитывались ортогональные моменты Цернике, эффективность применения которых для задач идентификации изображений описывается в работе [10].
3. Результаты компьютерных экспериментов.
Архитектура нейронной сети состояла их трех слоев:
348
‒входной слой нейронной сети (в зависимости от того какие признаки подавались для обучения на вход нейронной сети, количество нейронов во входном слое варьировалось);
‒один скрытый слой (во время различных экспериментов количество нейронов в скрытом слое варьировалось – 32, 64, 128, 256 нейронов);
‒один выходной слой с шестью нейронами.
Обучение нейронной сети осуществлялось методом обратного распространения ошибки. Для обучения и проверки нейронной сети было обработано 420 фотографий. Время обучения во всех случаях вместе с этапом предобработки изображений и выделением признаков составляло примерно 15 минут.
Лучшие результаты (92,85 % правильно распознанных изображений – из 126 изображений тестовой выборки 9 были распознаны неверно) показывает нейронная сеть, для обучения которой на вход были переданы пиксели изображения, признаки районирования и инвариантные моменты Цернике. В скрытом слое сети – 32 нейрона.
В статье были созданы и обучены нейронные сети с различными параметрами и входными данными для распознавания знаков ограничения скорости дорожного движения на фотографиях, сделанных при дневном свете.
Лучшие результаты (92,85%) показывает нейронная сеть, на вход которой для обучения подавались пиксели области изображения со знаком ограничения скорости, моменты Цернике и признаки районирования. В скрытом слое 32 нейрона.
Анализ работ [2, 4, 5, 7, 9] показывает, что лучшие результаты (до 99,46 %) распознавания двумерных изображений достигнуты с использованием сверточных нейронных сетей [2, 3], в которых для обучения на вход нейронной сети передаются карты признаков, получаемые при помощи операции свертки, а не все пиксели изображения, что позволяет учитывать связь между соседними пикселями изображения.
Список литературы
1.LeCun, Y. Gradient Based Learning Applied to Document Recognition / Y. LeCun, L. Bottou, P. Haffner – IEEE Press, 1998. – P.46.
2.Солдатова, О.П., Гаршин, А.А. Применение сверточной нейронной сети для распознавания рукописных цифр. Самарский государственный аэрокосмический университет имени академика С. П. Королева – 8 с.
3.Nafiz, Arica, Fatos, Yarman-Vural, T. «An Overview Of Character Recognition Focused On Off-line Handwriting». IEEE.
4.The German Traffic Sign Recognition Benchmark; Webpage: http://benchmark.ini.rub.de/?section=gtsrb&subsection=results.
5.Andrzej Ruta, Yongmin Li, Xiaohui Liu. Real-time traffic sign recognition from video by class-specific discriminative features. Journal of pattern recognition, Volume 43 Issue 1, 2010.
349
6.Чигорин А, Кривовязь Г., Велижев А., Конушин А. Метод обнаружения до-
рожных знаков на изображении с обучением на синтетических данных. Лаборатория компьютерной графики и мультимедиа, Московский Государственный Университет имени Ломоносова. – 4с.
7.Попов, Е.Ю., Крыжановский, Д.И. Алгоритм распознавания дорожных знаков ограничения скорости. // Современные научные исследования и инновации. –
июнь, 2012 [Электронный ресурс]. URL: http://web.snauka.ru/issues/2012/06/14717.
8.Ватутин, Э.И., Мирошниченко, С.Ю., Титов, В.С. Программная оптимиза-
ция оператора Собеля с использованием SIMD-расширений процессоров семейства х86. Курский государственный технический университет.
9.Dinesh Dileep «A FEATURE EXTRACTION TECHNIQUE BASED ON CHARACTER GEOMETRY FOR CHARACTER RECOGNITION“.
10.Ахметшин, А.М, Трипольская, В.В. Повышение точности идентификации подписей на основе инвариантных моментов преобразования Радона. Днепропетровский национальный университет.
А. А. Лемкин, студент
В. В. Марков, кандидат технических наук, доцент Карачевский филиал Госуниверситета‒УНПК
Стенд для диагностики и градуировки термисторов источника электропитания персонального компьютера
Как показывает практика эксплуатации и ремонта компьютеров, одним из наименее надежных элементов системного блока является источник электропитания. В нем часто происходит отказ электролитических конденсаторов, которые расположены в его входной цепи. Во входной цепи источника электропитания конденсаторы расположены на выходе низкочастотного выпрямителя сетевого напряжения (рис. 1).
Рис. 1. Схема низкочастотного выпрямителя со сглаживающим фильтром
Принцип действия выпрямителя со сглаживающим фильтром поясняется временной диаграммой (рис. 2). При поступлении на вход синусоидального сетевого напряжения UВХ мостовой выпрямитель на диодах VD1- VD4 преобразует переменное напряжение в напряжение положительной полярности (UДМ). Низкочастотный фильтр на основе дросселя L1 и кон-
350
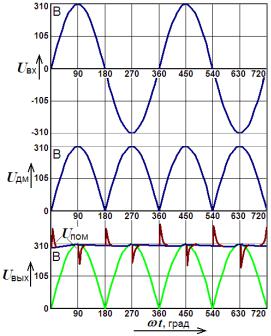
денсаторов C1-C2 сглаживают высокочастотные помехи. Ключ S1 служит для ручного задания значения напряжения [1].
Опасность этой схемы выпрямления и сглаживания напряжения заключается в риске повреждения конденсаторов. В момент включения источника электропитания компьютера в цепи с конденсаторами происходит бросок напряжения, который, при многократном повторении, может привести к их повреждениям. Если в схеме имеются паразитные индуктивности и емкости, в цепи могут возникать короткие импульсы напряжения, повышающие опасность повреждения конденсаторов.
Рис. 2. Временная диаграмма, поясняющая принцип действия выпрямителя
В схеме выпрямителя предусмотрена защита конденсаторов от резких перепадов напряжения и превышения его действительного значения.
Для защиты от превышения сетевым напряжением своего допустимого значения (UВХ = 220 В 10 % < 250 В) параллельно конденсаторам включены диодные тиристоры (динисторы или варисторы) VR1 и VR2. Тиристоры выбираются таким образом, чтобы их критическое напряжение, при котором происходит переход в открытое состояние, соответствовало UКР = 245…250 В. Тогда при выходе сетевого напряжения за пределы допуска конденсаторы будут закорачиваться тиристорами, после чего произойдет срабатывание предохранителей входной цепи источника электропитания персонального компьютера.
351
Для защиты от резких перепадов напряжения предназначены термисторы TR1 и TR2 (обычно устанавливается только термистор TR1). В момент включения питания термистор находится в состоянии теплового равновесия с окружающей средой (то есть, «холодный»), и его сопротивление достаточно велико – около нескольких кОм. Поэтому ток в цепи фильтра мал. По мере нагревания термистора входным током его входное сопротивление плавно уменьшается до нескольких Ом и перестает влиять на силу тока, и, соответственно, напряжение, во входной цепи. Таким образом, благодаря термистору, исключается возможность резких перепадов входного тока и напряжения при включении персонального компьютера. Это схемотехническое решение используется в большинстве случаев, так как оно наиболее простое и дешевое, обеспечивает наименьшую потерю энергии и высокую надежность.
Термисторная защита конденсаторов от резких перепадов сетевого напряжения имеет два основных недостатка: инерционность и индивидуальность настройки. Инерционность термистора приводит к тому, что при быстром выключении и включении персонального компьютера термистор не успевает остыть, его сопротивление остается малым, и поэтому не будет ограничивать зарядный ток при последующем включении. После выключения персонального компьютера желательно подождать 1…2 минуты, чтобы дать возможность тиристору остыть и вернуть его сопротивление в высокоомное состояние [2].
Индивидуальность настройки термистора заключается в том, что для конкретного источника электропитания подбирается термистор конкретной марки (в частности, для источника электропитания формата ATX подбирается термистор типа 8D-13). Технологический разброс параметров термисторов в пределах партии одного типа составляет 20 %, поэтому после установки термистора в цепь выпрямителя вспомогательные элементы подстраиваются под него. Это приводит к тому, что при замене «родного» термистора другим эффективность защиты конденсаторов от зарядного тока может значительно снизиться [2].
Предлагается стенд, позволяющий проводить диагностику и градуировку термисторов источника электропитания компьютера. Структурная схема предложенного стенда показана на рис. 3.
Стенд позволяет градуировать термистор (объект исследований) по четырем параметрам: сопротивление при начальной температуре (20…35 °С), сопротивление при конечной температуре (задается источником тепловой энергии и определяется средней температурой внутри работающего источника электропитания персонального компьютера), время установления низкого сопротивления (время нагрева термистора) и время установления высокого сопротивления (время остывания термистора). Стенд содержит два термометра – один образцовый (термометр объемного расширения), предназначенный для измерения температуры источника тепловой энергии, а второй – рабочий (цифровой термоэлектрический термометр),
352

служащий для измерения температуры опытного термистора. Отсчетное устройство рабочего термометра должно содержать уставку – значение опорной температуры, соответствующей заданной температуре «родного» термистора в источнике электропитания. Для измерения времени нагрева и остывания термистора в схему стенда включен секундомер.
Рис. 3. Структурная схема стенда для градуировки термисторов
Применение данного стенда позволяет технически обоснованно подобрать термистор для конкретного типа источника электропитания персонального компьютера и этим обеспечить надежную защиту от резких перепадов сетевого напряжения и высокого зарядного тока в электрической сети питания.
Для создания предложенного стенда необходимо проведения целого ряда экспериментальных исследований: определение минимального, максимального и среднего значений температуры внутри источника электропитания для двух режимов – выключенного (тепловое равновесие с окружающей средой) и рабочего (в течение такого времени работы, при котором температура внутри источника достигает своего установившегося значения); определение значение напряжения питания термистора, которое не будет влиять на результаты его градуировки; определение достаточного времени охлаждения термистора.
Список литературы
1.Кучеров, Д.П. Источники питания мониторов [Текст] / Д.П. Кучеров. – СПб.:
Питер, 2009. – 240 с.
2.Головков, А.В. Блоки питания для системных модулей типа IBM PC XT/AT [Текст] / А.В. Головков, Б.В. Любицкий. – М.: «ЛАД и Н», 1995. – 93 с.
353

А. В. Леонард, аспирант
Е. С. Брискин, доктор физико-математических наук, профессор Волгоградский государственный технический университет
Движение шагающей машины с поворотным движителем, образованным сдвоенными механизмами шагания
Известны шагающие машины со сдвоенными механизмами шагания [1]. Отличительным свойством данных типов машин является наличие ударов в процессе их перемещения, обусловленных конструктивными особенностями движителей: один привод поворота – на пару сдвоенных механизмов шагания (рис. 1) [2].
Рис. 1. Шагающая машина «Ортоног» / Поворотно-цикловый движитель
Для изучения кинематики шагающего движителя, образованного сдвоенными цикловыми механизмами с направляющей [3‒5], рассматривается шагающая машина ‒ модель. Шагающая машина состоит из одного движителя, который соединен посредством привода поворота с поддерживающей рамой (рис. 1). Кинематическая схема машины представлена на рис. 2.
Постановка задачи. Определить управляемые законы перемещения движителя ψ, ρ для следующего способа задания движения корпуса ша-
гающей машины (1):
V |
V |
t ; |
(1) |
M |
M |
|
|
Ω Ω t |
|
|
|
и выработать методы и подходы управления, минимизирующие ударные нагрузки приводов машины.
354
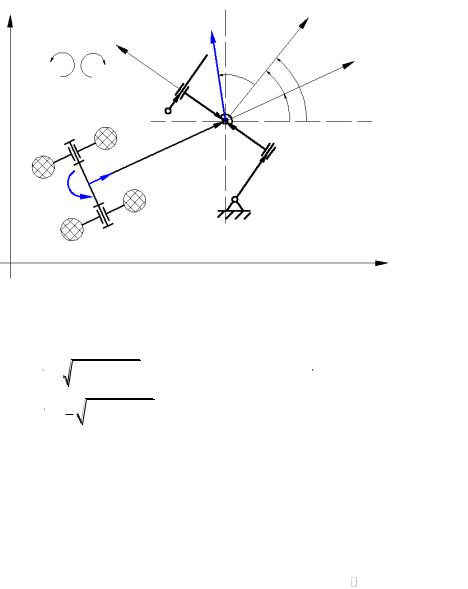
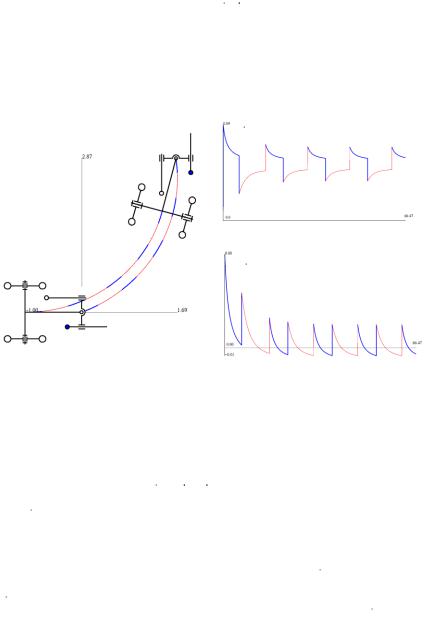


Список литературы
1.Брискин, Е. С. Опыт разработки и испытаний шагающих опор дождевальной машины / Е.С. Брискин, В.В. Чернышев, В.В. Жога, А.В. Малолетов // Тракторы
исельхозмашины. - 2011. - № 9. - С. 27-31.
2.Брискин, Е.С. Об управлении движением шагающей машины с двигателем минимальной мощности / Е.С. Брискин, В.В. Жога, А.В. Малолетов // Известия РАН. Механика твердого тела. - 2009. - № 6. - C. 21-30.
3.Брискин, Е. С. Синтез циклового шагающего механизма с направляющей и критерии его оценки / Брискин Е. С., Леонард А. В., Малолетов А. В. // Теория
Механизмов и Машин. 2011. № 1(17). Том 9. С. 14–24
4.Пат. 2422317 РФ, МПК B 62 D 57/032. Шагающая опора для многоопорных самоходных машин и для транспортных средств повышенной проходимости / А. В. Леонард, Е. С. Брискин. – 2011.
5.Цикловый шагающий механизм с направляющей / Леонард А. В. // Известия высших учебных заведений. Машиностроение. – 2011. - № 10. – С. 18-22.
Milan Luštiak, Bc. (Милан Луштьяк), студент 1 курса магистратуры Štollmann Vladimír, doc. Ing. CSc. PhD., доцент Технический университет в г. Зволен, Словакия
Мехатронные системы рабочей головки харвестра
Темой статьи является конструкция рабочей головки харвестра, используемой при добыче в лесном хозяйстве. Цель работы – идентификация основных деталей рабочей головки харвестра, а также анализ технических параметров конкретного харвестра типа Timberjack 1270D, показанного на рис. 1.
Рис.1. Харвестр типа Timberjack 1270D
Рабочая головка харвестра – это устройство, закрепленное на роторе гидравлического крана харвестра, главная задача которого – отпилить дерево, опустить его в рабочую позицию, обрезать сучья, обрезать ствол и
358

положить. Головка может двигаться практически во всех направлениях так, чтобы было легче захватить дерево. Контроль движения головки важно осуществлять с точки зрения выбора направления дерева при спиливании, обрезке сучьев и укладывании лесоматериала [1]. Головка состоит из следующих основных подсистем, представленных на рис. 2:
–питающие цилиндры (1);
–механизм раскряжевки (2);
–захватно-очистительный механизм (3);
–измерительное устройство (4).
Рис.2. Рабочая головка харвестра
Питающие цилиндры. Для качественной обработки ствола очень важна конструкция питающих цилиндров. Применяются два типа питающих цилиндров, первый – это цельнометаллические, с плоским наконечником или ребром на поверхности. Отличаются большой силой продвижения ствола через рабочую головку. Имеют длительный срок эксплуатации и надежный механизм при обрезании ствола. Второй тип цилиндра состоит из стального обруча с резиновой оболочкой на поверхности. Этот тип цилиндра отличается минимальным повреждением ствола и используется при изготовлении качественного лесоматериала [5].
Существуют два типа рабочих головок харвестра, показанные на рис. 3 и 4. Головка шведского типа имеет более крупную конструкцию и более длинный основной каркас, оснащена двумя подающими цилиндрами (двухмоторная) и используется при работе с длинными и ровными стволами с минимальным количеством неровностей [4].
359
Рис. 3. Головка шведского типа |
Рис. 4. Головка финского типа |
Головка финского типа имеет более компактную конструкцию и более короткий основной каркас, что позволяет лучше копировать поверхность ствола, оснащена четырьмя подающими цилиндрами (четырехмоторная) и используется при работе, как с ровными, так и с кривыми стволами.
Механизм раскряжевки. Механизм раскряжевки используется для спиливания дерева и разрезания ствола на лесоматериал. Чаще всего используются следующие типы механизма раскряжевки: пильная цепь, дисковая пила, фрезерный механизм, строгальный или срезающий механизм.
Захватно-очистительный механизм. Захватно-очистительный механизм используется для присоединения рабочей головки к подножию дерева и очищения ствола от сучьев одновременно. Потому затяжки в передней части оснащены лезвиями. Кроме этих двух пар затяжек головки оснащены прочным разделительным ножом. Для лучшего копирования ствола нож прижимается к стволу пружиной, и подвижные ножи закреплены на вращающемся стержне. Силу прижатия к стволу можно перенастроить в процессе обрезки сучьев. Качество наточки ножей отразится на качестве обрезки сучьев со ствола. До тех пор, пока ножи достаточно наточены, они не задевают кору, не разрезают дерево. Угол заточки ножей
– около 35° [7].
Измерительное устройство. Харвестр часто используется при разных породах деревьев и во время этого процесса нужно максимально использовать возможности автоматической оптимизации, которая возможна благодаря измеряющей и управляющей системе [3]. Измерительная система при измерении длины лесоматериала использует оценку информации, полученной от зубчатого измерительного колеса, прижатого к стволу пружиной или гидравлическим цилиндром, к которому присоединен оптоэлектронный датчик, который при движении вперед или назад по стволу издает соответствующее количество импульсов для данной длины. Измеряемая длина указывается с точностью до сантиметра. Измерение диаметра ствола основано на двух вращающихся потенциометрах, которые служат как регулируемый делитель напряжения. Потенциометры размещены на фиксирующих головках, возле разделительных ножей и реагируют на каждое открытие или закрытие разделительных ножей, при-
360
чем при открытии электрическое напряжение повышается, а при закрытии
– понижается.
Timberlink. TimberLink – это компьютерная программа, созданная для отслеживания выработки и состояния лесных машин. Эта программа может помочь эксплуатационникам и операторам машин в работе и уходе за машиной, повышении эффективности эксплуатации и увеличения срока эксплуатации харвестра. Информация, вычисленная TimberLink, может быть использована при обучении будущих операторов и при развитии их рабочих навыков. Эксплуатация харвестровой технологии состоит из двух отдельных фаз эксплуатации – сортировка стволов и производство лесоматериала. Фаза сортировки состоит из таких действий, как передвижение машины, работа с гидравлическим краном, до тех пор, пока дерево не спилено. В этой фазе TimberLink измеряет время и расход горючего для каждого действия отдельно. Фаза производства лесоматериала состоит из спиливания дерева, манипуляции со стволом и выработки единиц лесоматериала. В этой фазе программа отслеживает время, необходимое для производства лесоматериала, а также расход стволовых масс, даже при обработке стволов с разными диаметрами и длиной. Большинство значений указанных TimberLink, отображаются у оператора в столбиковых диаграммах, разделенных на основании объема отдельных стволов. С помощью регулярного контроля результатов измерений TimberLink можно быстро определить изменения состояний потребления целого устройства. Например, изменения в продуктивности труда, снижения потребления движущих масс и состояния рабочей головки харвестра [1].
Timbermatic. Речь идет об активной системе, которая для управления целой машиной использует разные производственные параметры, благодаря которым предварительные параметры определяет сам оператор машины. Следующим свойством системы является информирование оператора о критических достоинствах на основе отрегулированных парамет-
ров [8].
Timbermatic и рабочая головка харвестра. TimbermaticTM 300, на рабочей головке харвестра выполняет следующие функции:
открытие и закрытие верхних разделительных ножей вместе с высоким давлением для разделительных ножей;
открытие и закрытие цилиндров движения вместе с высоким давлением для цилиндров движения;
движение вперед и назад;
включение двигателя пилы;
обработка пней и цветное обозначение;
движение рейки пилы;
открытие и закрытие нижних разделительных ножей;
наклон головки вниз-вверх.
С головки харвестра получают следующую информацию:
361
диаметр;
длина;
положение пилы в исходном положении;
положения пилы;
вращение двигателя пилы.
В статье обсуждается конструкция рабочих головок харвестра у многофункциональных производственных машин. Была проведена идентификация их основных составляющих в механической и электронной частях устройства. В качестве информации использовалась специализированная литература и интернет. Данная проблематика более подробно решена в дипломной работе автора статьи, которая касается энергетических требований и надежности Timberjack 1270D в условиях лесов Словакии.
Проект выполнен в рамках гранта VEGA № 1/0931/13 при финансовой поддержке Министерства образования, науки, исследования и спорта Словацкой республики.
Список литературы
5. Luštiak, M. Technické riešenie Timberjack 1270D. Bakalárska práca. Zvolen: Technická univerzita vo Zvolene. Lesnícka fakulta. 2012. 42 p. На словацком языке.
2.Луштьяк М. Многооперационные лесозаготовительные машины // Измерения, контроль и диагностика – 2012: Сборник материалов II Всероссийской научно-технической конференции студентов, аспирантов и молодых ученых, с международным участием, посвященной 60-летию Ижевского государственного технического университета имени М.Т. Калашникова (Ижевск, 14-16 мая 2012 г.).
–Ижевск: А4, 2012. – С. 343–350.
3.Štollmann, V., Gejdoš, M. Základy lesníckej techniky. Skriptum, Zvolen: ES TU,
2010. S. 208. На словацком языке.
4.Štollmann, V., Slugeň, J. Návrh novej kategorizácie harvestrov na základe analýzy hmotnostných a výkonových parametrov // Acta Facultatis Forestalis 51(1), 2009. На словацком языке.
5.Štollmann,V., Slugeň, J. Lesnícke mechanizačné prostriedky. Skriptum, Zvolen:
ES TU, 2009. На словацком языке.
6.Internet [cit. 2013-01-30]: http://www.merimex.cz/produkty/john-deere/starsi- modely/harvestory/rada-d/timberjack/john-deere-1270d/
7.Internet [cit. 2013-01-30]: http://www.merimex.cz/produkty/john-deere/starsi- modely/harvestory/rada-d-eco-iii/john-deere-1270d-eco-iii-1242193229/
8.JOHN DEERE. 2005. Příručka pro obsluhu TimbermaticTM 300, Řídící a měřící systém. OMF069472. Firemná literatúra. На чешском языке.
362
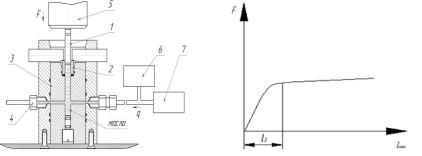
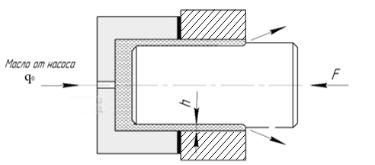
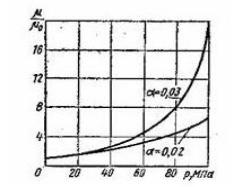

−Сила запрессовки FЗ , показывает переход процесса гидропрессовой сборки из одной стадии в другую;
−Температура масла tM , как параметр, влияющий на вязкость рабо-
чей жидкости, и характеризующий ее эксплуатационные характеристики;
−Текущая длина запрессовки lЗ ‒ характеризует взаимное положение надвигающихся друг на друга деталей;
−Расход масла ‒ параметр QM , определяющий тип трения на заход-
ной фаске втулки.
Выводы: 1. В качестве источников информации принимаются давление qM , температура масла tM , сила запрессовки FЗ , текущая длина за-
прессовки lЗ , а также расход масла QM . Которые обеспечивают ком-
плексную информацию о текущем состоянии процесса в режиме реального времени, для эффективного управления процессом сборки в автоматическом режиме;
2. В качестве управляющего воздействия используется скорость запрессовки VЗ , изменяемая в заданных технологических пределах, которая
обеспечивает ,необходимое для процесса сборки, давление масла qM и тем самым образует нужный зазор между деталями.
Список литературы
1. Абрамов, А.И., Абрамов, И.В., Петелев, Е.М., Романов, А.В. Автоматизация гидропрессовой сборки соединений с натягом на основе адаптивной (интеллектуальной) системы управления. //[Электронный ресурс]. Сборник инновационных проектов. ФГБОУ ВПО «Ижевский государственный технический университет имени М.Т. Калашникова», ноябрь-декабрь 2011. – 1 эл. опт. диск (CD- ROM).
2.Щенятский, А.В. Теория и технология гидропрессовых соединений : монография / А.В. Щенятский, И.В. Абрамов, Э.В. Соснович и др. – Ижевск.: Изд-во ИжГТУ, 2012. – 496 с.:ил.
3.Статья «Основные свойства капельных жидкостей. Основные свойства газов» [Электронный ресурс] – Режим доступа: http://nex7.narod.ru/gidra/2. htm, свободный.
Ivan Mrekaj (Иван Мрекай), студент 3 курса
Štollmann Vladimír, doc. Ing. CSc. PhD., доцент Технический университет в г. Зволен, Словакия
Определение запаса горной энергии на вузовском лесном заводе технического университета в г. Зволен (Словакия)
Деревья в горах обладают не только солнечной энергией, запасенной в химических связях, которая освобождается во время сгорания, но и грави-
367
дерева. Некоторые примеры объемных весов деревесных пород Rdr перечислены в табл. 1.
Таблица 1. Пример объемных весов древесных пород
Древесная порода |
Объемный вес, кг /м3 |
ель европейская |
740 |
пихта белая |
1000 |
бук европейский |
990 |
дуб |
1000 |
Среднюю альтитуду древостоя H определяли интерполяцией из горизонталей в центре тяжести массы древостоя T. Центр массы древостоя T определяли графическим методом, который состоит из следующих действий [3]:
выделение границ участков;
выделение горизонтали и установление сечения горизонтали;
разбиение участка на основные геометрические фигуры;
определение парциальных центров массы Ti;
определение центра масс древостоя T;
определение альтитуды центра массы T.
Рис.1. Установление центра массы древостоя и определение его альтитуды
Так определенная альтитуда H снята к нулевой равнине моря. На практике при канатном способе вывоза леса эта энергия нерасполагаемная вся, но лишь ее часть, и потому до вычисления будет входить относительная альтитуда древостоя H´, которая представляет разницу межды абсолютной алтитудой древостоя H и алтитудой места нахождения деревьев HOM , для которых рассчитывается древесная масса.
369
Данная тема выполнена в рамках гранта VEGA № 1/0931/13 при финансовой поддержке Министерства образования, науки, исследования и спорта Словацкой республики.
Список литературы
1.Horák, Z., Krupka, F., Šindelár, V. Základy technické fysiky. Praha: Práce,
1955. P. 922. На чешском языке.
2.Mikulčák, J. a kol. Matematické, chemické a fyzikálne tabuľky. Bratislava:
SPN, 2007. P. 230. На словацком языке.
3. Mrekaj, I. Методика определения потенциальной энергии горных лесов // Измерения, контроль и диагностика – 2012: Сборник материалов II Всероссийской научно-технической конференции студентов, аспирантов и молодых ученых, с международным участием, посвященной 60-летию Ижевского государственного технического университета имени М.Т. Калашникова (Ижевск, 14-16 мая 2012 г.).
– Ижевск: А4, 2012. – С. 350–355.
4. Suchomel, J. a kol. Optimalizácia terénnej a technologickej typizácie v prostredí GIS. Monografia, Zvolen: ES TU vo Zvolene, 2009. P. 117. На словацком языке.
5. Štollmann,V., Ilčík, Š., Suchomel, J. Flywheel propulsion mechanism of a skyline yarder. Medinárodná patentová prihláška, PCT/SK2010/050006, pub.č. WO/2010/123469, dátum publikovania 28.10.2010, B66C 13/28, B60K 6/10, B60K 6/543, B66C 21/00. На английском языке.
6.Štollmann,V., Slugeň, J. Lesnícke mechanizačné prostriedky. Skriptum, Zvolen: ES TU, 2009. P. 198. На словацком языке.
7.Štollmann, V., Ilčík, Š. Rekuperačné lanové zariadenia. Monografia, Zvolen:
ES TU, 2008. 77 p. На словацком языке.
8.Štollmann, V. Nový alternatívny zdroj energie pre pohon strojov // Lesy pre spoločnosť 2010, Košická Belá, 9-10.3.2010. Gemerské regionálne združenie vlastníkov neštátnych lesov. На словацком языке.
И. Ю. Мухаметшина, аспирант; А. М. Артанов, аспирант
А. Л. Ульянов, старший научный сотрудник кандидат физико-математических наук
Л. Д. Загребин, доктор физико-математических наук Ижевский государственный технический университет
имени М. Т. Калашникова
Автоматическое измерение температуропроводности наноструктурируемых материалов Fe + M (M = C, Si, Ge, Sn) с использованием импульсного лазерного излучения
Современные темпы развития технологий в металлургии, включая и наноструктурируемые, дают множество новых областей их применения, требующих получения информации о теплофизических свойствах веществ. Таким образом является актуальной задачей усовершенствование
371
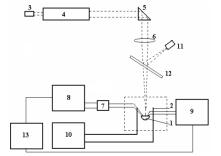
существующих методов, а также создание новых экспериментальных установок по измерению температуропроводности, позволяющих повысить точность и оперативность теплофизических измерений [1].
В настоящее время для измерения температуропроводности чаще всего используют импульсные методы измерения температуропроводности и метод температурных волн. Применение импульсного метода измерения температуропроводности даѐт возможность создать более простую установку, позволяющую с высокой оперативностью проводить измерения теплофизических свойств металлов и сплавов различных форм [2].
На рис. 1 приведена структурная схема экспериментальной установки, на которой проводятся измерения температуропроводности металлов и сплавов [3].
Рис.1. Структурная схема экспериментальной установки
Твѐрдотельный оптический квантовый генератор ГОР 100М (на рис. 2. представлена схема рубинового лазера) создаѐт тепловой импульс с длительностью 1 мс и длиной волны 0,694 мкм (4), подаваемый на поворотную призму (5), линзу (6) и на образец (1), находящийся в вакуумной печи (2). Питание печи осуществляется постоянным током, вырабатываемым регулятором температуры с выпрямителем и фильтром, что позволяет уменьшить уровень сетевых помех (10). Временное измерение температуры перепада усиливается блоком предварительных усилителей (7) и поступает на вход компьютерного осциллографа АСК – 3106 (8). Компьютер (13) служит для дальнейшей обработки сигнала от осциллографа и цифрового вольтметра (9). Контроль излучения осуществляется калориметром ИМО (11) через отражательное стекло (12). Юстировочный лазер
(3) служит для настройки ГОР 100М.
372
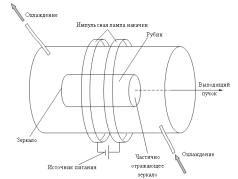
Рис.2. Схема рубинового лазера
Связь осциллографа АСК – 3106 и компьютера осуществляется через среду программного обеспечения AKTAKOM OSCILLOSCOPE PRO V. 2.0.4.5 для цифровых запоминающих осциллографов-приставок к ПК.
На автоматической экспериментальной установке были проведены тестовые измерения, образец представлял собой порошок полученный при механической активации в высокоэнергетических шаровых мельницах. Для приготовления образцов использовались порошки карбонильного железа ОСЧ-13-2 (99,98%), углерода, кремния, германия и олова в атомном соотношении Fe(68)M(32), где M = C, Si, Ge, Sn. Механическое сплавление исследуемых материалов осуществлялось при одинаковых условиях, в инертной среде (аргон) в шаровой планетарной мельнице Fritsch P-7 с энергонапряженностью 2,0 Вт/г. Для определения размера зерен из рентгеновских дифрактограмм применялся гармонический анализ Уоррена и Авербаха с аппроксимацией рентгеновских рефлексов функцией Фойгта [4]. Результаты показали, что размер зерна ОЦК фазы после механоактивации составляет порядка 2–5 нм.
На рис. 3 представлена температурная зависимость температуропроводности нанокристаллического сплава железа с sp-элементами. Элементы замещения (Si, Ge) не приводят к значительному изменению температуропроводности к отношению чистого железа.
373
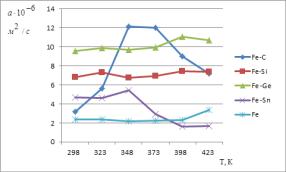
Рис. 3. Температурная зависимость температуропроводности нанокристаллического сплава Fe(68)‒M(32) (M = C, Si, Ge, Sn)
Автоматизация измерения температуропроводности позволяет повысить продуктивность эксперимента, увеличить количество проводимых опытов, а так же уменьшить влияние человеческого фактора на получаемые результаты.
Погрешность измерений не превышает 5 %.
Список литературы
1.Кайдалов, С.А. Фоточувствительные приборы и их применение: Справочник. – М.: Радио и связь, 1995. – 120с.
2.Карслоу, Г., Егер, Д. Теплопроводность твѐрдых тел. – М.: Наука, 1964. –
488с.
3.Загребин, Л.Д., Зиновьев, В.Е., Сипайлов, В.А. Определение импульсным методом коэффициентов температуропроводности и теплопроводности полусферических образцов. Никель // ИФЖ. – 1981. – T. 40. – № 5. – С. 864-869.
4.Дорофеев, Г. А. Механизмы, кинетика и термодинамика механического сплавления в системах железа с sp-элементами // Дис. д.ф.-м.н. ФТИ УрО РАН. Ижевск 2006.
Е. Г. Нуриева, магистрант Ю. Р. Никитин, кандидат технических наук, доцент
Ижевский государственный технический университет имени М. Т. Калашникова
Диагностирование оборудования на производстве ДСП
Одним из важнейших условий эффективной работы автоматических и автоматизированных производств является их надежное функционирование. Современное технологическое оборудование представляет собой мехатронные системы, состоящих из мехатронных модулей. Диагностирова-
374
ние мехатронных систем на производстве является наиболее перспективным и быстро развивающимся аспектом современного производства [1– 4]. Чтобы избежать остановки производства, которая приводит к простоям
ибольшим затратам, необходимо прогнозировать аварии мехатронных узлов, которые могут возникнуть при его эксплуатации.
Втехнологическом процессе производства трехслойных древесностружечных плит (ДСП) с мелкоструктурной поверхностью на основе карбамидоформальдегидных смол используется различное оборудование
– обрабатывающие станки, формирующие станции, шлифовальные станки
ит. д. Технологическое оборудование состоит из узлов и механизмов – электрических двигателей, механических передач, подшипниковых узлов
ит. д.
Согласно проведенному анализу наиболее часто выходящими из строя узлами на производстве ДСП являются подшипниковые узлы и асинхронные электрические двигатели. Так как в них имеются одновременно разные виды неопределенностей, связанные с различными физическими процессами в оборудовании, необходимо использование для принятия решений о техническом состоянии теории нечетких множеств, которая позволяет адекватно учесть имеющиеся виды неопределенности. Аппарат нечетких множеств позволяет анализировать техническое состояние элементов этих узлов разной физической природы – механических, электромеханических, электрических, электронных.
Анализ дефектов оборудования показал, что информативными диагностическими параметрами являются вибрация, температура и уровень шума. Затем был проведен анализ закономерностей между дефектами и диагностическими параметрами. На основе данных закономерностей построена база правил системы нечеткого вывода для определения технического состояния узла.
Алгоритм диагностирования ММД на базе системы нечѐткого вывода включает следующие основные этапы:
1.Измерение диагностических параметров.
2.Фаззификация диагностических параметров.
3.Аккумуляция заключений нечетких правил.
4.Дефаззификация выходной переменной – уровня технического состояния.
Для сбора диагностических данных используется шумомер-виброметр ОКТАВА 110А-Эко. С помощью этого прибора происходит сбор данных
врежиме реального времени и сохраняется в виде бинарного файла, преобразование которого в .txt или .exl возможно посредством программы Signal+. Данные разделены по частотам и времени. Каждая запись длится 1 минуту. Измерения вибрации оборудования повторяются каждый день три раза. После накопления информации целесообразно изменить период измерения диагностических параметров в зависимости от технического состояния, т.к. срок эксплуатации, например, подшипников составляет 3
375
года. Все пороговые значения задаются либо при замере только что введенных в эксплуатацию новых узлов и узлов, уже вышедших из строя, либо используя теоретические данные, взятые из ГОСТ [5–8] или регламентов.
Таблица. Теоретические значения выбранных диагностических данных
№ |
Вибрация, |
Температура, |
Шум, дБ |
|
Состояние |
||
дБ |
°C |
Двигатель |
Подшипник |
узла |
|||
|
|||||||
11 |
149 |
110 |
100 |
|
50 |
|
|
10 |
145 |
105 |
97 |
|
47 |
Неудовл. |
|
9 |
141 |
100 |
94 |
|
44 |
|
|
8 |
137 |
95 |
90 |
|
40 |
|
|
7 |
133 |
90 |
87 |
|
37 |
Удовлет. |
|
6 |
129 |
85 |
84 |
|
34 |
||
|
|
||||||
5 |
125 |
80 |
80 |
|
30 |
|
|
4 |
121 |
75 |
77 |
|
27 |
|
|
3 |
117 |
70 |
74 |
|
24 |
Нормал. |
|
2 |
113 |
65 |
70 |
|
20 |
||
|
|
||||||
1 |
109 |
60 |
67 |
|
17 |
|
|
Измеренные данные загружаются в программный продукт MatLab, где по созданной заранее нечеткой модели обрабатываются, и делается вывод о состоянии узла.
Все причины поломок на производстве можно определить по внешним признакам, таким как чрезмерные вибрации и нагрев. На этой основе можно создать модель для проведения диагностики. Так, основными элементами выбираются асинхронный двигатель и подшипники качения. Для определения дефектов анализируются все отклонения от какого-либо элемента. Для измерения каждого параметра используются соответствующие датчики.
Входными лингвистическими переменными являются ЧАСТОТА ВИБРАЦИИ, УРОВЕНЬ ТЕМПЕРАТУРЫ и УРОВЕНЬ ШУМА. Например, лингвистическая переменная будет иметь значения, т.е. термы НИЗКИЙ, СРЕДНИЙ, ВЫСОКИЙ, ОЧЕНЬ ВЫСОКИЙ. Для каждого терма определяется диапазон значений от 0 до 200 С. Согласно теории нечетких множеств каждому значению температуры может быть поставлено в соответствие некоторое число от 0 до 1, которое определяет степень принадлежности данного физического состояния к тому или иному терму лингвистической переменной УРОВЕНЬ ТЕМПЕРАТУРЫ. Степень принадлежности определяется так называемой функцией принадлежности М(t), где t-значение температуры в данный момент времени. Таким же образом, определяются и другие лингвистические переменные. В качестве выходных переменных будут являться состояние диагностируемого узла, условно НОРМАЛЬНОЕ, УДОВЛЕТВОРИТЕЛЬНОЕ и НЕУДОВЛЕТВОРИТЕЛЬНОЕ.
376
Для решения поставленной задачи используется пакет Matlab, т. к. он имеет в своем составе fuzzy-приложение, необходимое для моделирования работы всей системы. Все действия над нечеткими числами задаются минимальным набором функций и происходят внутри программы. Также для получения результата необходимо создать базу правил, согласно которым та или иная переменная будет принадлежать к выходной переменной [9]. Например, если температура находится на уровне СРЕДНИЙ, уровень шума – ВЫСОКИЙ, частота вибраций – ВЫСОКИЙ, то результатом является выходная переменная УДОВЛЕТВОРИТЕЛЬНОЕ.
В настоящее время выполняется сбор диагностических данных на производстве ДСП. Результаты экспериментальных исследований показывают, что выбранные теоретические значения соответствуют реальным значениям диагностических параметров. На основе созданной нечеткой модели можно будет дистанционно определять состояние узла по собранным диагностическим данным после внедрения разработанной системы диагностирования на производстве ДСП. Использование возможностей нечеткой логики и программного продукта Matlab позволяет получить модель диагностирования, на базе которой будут разработаны алгоритмы и программные продукты для диагностирования оборудования по производству ДСП.
Список литературы
1.Nikitin, Y., Abramov, I. Mechatronic modules diagnosis by use of fuzzy sets. – Proceedings of 14-th International Conference on Mechatronics. – 1-3 June, 2011. – Trencinske Teplice, Slovakia. – P. 109–111.
2.Никитин, Ю.Р. Диагностирование мехатронных систем: учеб. пособие / Ю. Р. Никитин, И. В. Абрамов. – Ижевск : Изд-во ИжГТУ, 2011. – 116 с.
3.Никитин, Ю.Р. Интеллектуальные узлы машин с функциями диагностики // Вибродиагностика, триботехника, вибрации и шум: Монографический сборник
материалов семинара VII Международной научно-технической конференции «Со- циально-экономические и экологические проблемы лесного хозяйства» / Под ред. А.А.Санникова и Н.В.Куцубиной. – Екатеринбург: Уральск. гос. лесотехн. университет, 2009. – С. 120-124.
4.Никитин, Ю.Р., Абрамов, И.В. О построении системы диагностирования станков c ЧПУ // Мехатроника, автоматизация, управление. – 2011. – № 4. – С.32–
35.
5.ГОСТ Р ИСО 13373-1–2009. Контроль состояния и диагностика машин. Вибрационный контроль состояния машин. Часть 1. Общие методы.
6.ГОСТ 20815-93. Машины электрические вращающиеся. Механическая вибрация некоторых видов машин.
7.ГОСТ 16372-93. Машины электрические вращающиеся. Допустимые уровни
шума.
8.ИСО 15242-2–2004. Подшипники качения. Методы измерения вибрации.
9.Штовба, С.Д. Проектирование нечетких систем средствами MATLAB. – М.: Горячая линия – Телеком, 2007. - 288 с.
377
А. А. Пилин, магистрант Ю. В. Турыгин, доктор технических наук, профессор
С. А. Платов, аспирант Ижевский государственный технический университет
имени М. Т. Калашникова
Автоматизированная система управления контрольно-измерительным модулем параметров пружин
Изготовление крупных и ответственных пружин требует стабильного технологического процесса для обеспечения необходимого уровня качества. Это достигается безусловной реализацией технологического процесса. Изготовление пружины включает в себя: навивку, химикотермическую обработку, а также обработку торцов пружины [1].
На основе анализа методов обработки торцов выбрана плазменная резка, обеспечивающая необходимую точность и скорость обработки торцов, а также требуемую шероховатость обработанной поверхности.
С целью повышения размерной точности, производительности, качества обработки торцов пружины и эффективности использования плазменной резки разработан контрольно-измерительный модуль (КИМ), обеспечивающий высокую точность позиционирования пружины, а также определяющий еѐ геометрические параметры.
АСУ КИМ предназначена для получения информации, необходимой для исполнения следующих процессов:
‒определение длины пружины (расстояние между крайними точками
(рис. 1);
‒определение положения торцов (угол между плоскостью, перпендикулярной оси прутка и плоскости XOY манипулятора (рис. 2).
Воснову КИМ были выбраны два широкополосных лазерных датчика ZX-GT фирмы Omron, обладающие разрешением в 0,25 мкм при длительности измерительного цикла менее 110 мкс. Ширина луча 28 мм, а расстояние между излучателем и приѐмником до 500мм [2].
Для получения и регистрации данных измерений геометрических параметров и последующей математической обработки полученных результатов измерений КИМ содержит программно-аппаратный комплекс, поз-
воляющий управлять процессом измерения и определять величины Lп и αп. Процесс измерения разбит на два этапа. На первом, определятся длина
пружины Lп, состоящая из фиксированной постоянной длины Lс учѐтом сдвигов а и b, выполняемые манипулятором вдоль оси пружины, и двух
расстояний Lx1и Lx2, попавших в измеряемую область датчика (рис. 1). Определение длин Lx1 и Lx2 происходит по максимально удалѐнной точке торца пружины. Полученные результаты суммируются программноаппаратным комплексом и передаются на РТК плазменной резки.
378
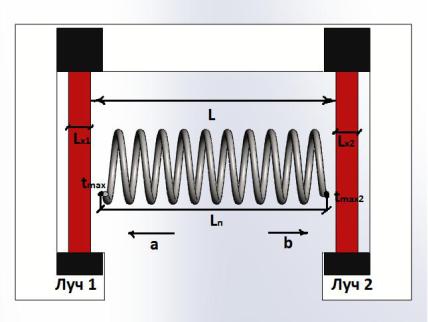
Рис. 1. Измерение длины пружины
где Lп – искомая длина пружины, L – заданная длина между датчиками, Lx1 и Lx2 – длина пружины, попавшая в измерительные области, a и b – сдвиги пружины.
Математическая модель измерения длины пружины будет иметь вид:
Lп = Lx1 + Lx2 + (L – a ‒ b).
Если Lx1 > 28 мм (луч 1 полностью перекрывается), то сдвиг a нужно уменьшить, а если Lx1 < 0 мм (на луч 1 не попала пружина), то сдвиг а нужно увеличить.
Аналогично нужно поступить со сдвигом b.
Если Lx2 > 28 мм (луч 2 полностью перекрывается), то сдвиг b нужно уменьшить, а если Lx2 < 0 мм (на луч 2 не попала пружина), то сдвиг b нужно увеличить.
В момент определения максимальной длины Lx фиксируется время tmax. Этот параметр участвует во втором этапе, для определения положения торцов.
На втором этапе измерительного процесса определяется положение торцов пружины посредствам угла αп между плоскостью, перпендикулярной оси прутка, и плоскости XOY манипулятора, через геометрию прямоугольного треугольника (рис. 2). Радиус R пружины условно заданная известная величина, а расстояние z от плоскости определения максималь-
379
С. А. Платов, аспирант, начальник отдела АСУТП ООО «НПЦ Пружина» Ю. В. Турыгин, доктор технических наук, профессор Ижевский государственный технический университет
имени М. Т. Калашникова
Исследование и повышение эффективности РТК подрезки торцов пружин
Исследование повышения эффективности робототехнического комплекса является актуальным в области машиностроения, а именно в технологии производства пружин. Данное исследование будет проводиться на производстве ООО «НПЦ Пружина».
Технологический процесс производства пружин на современном предприятии включает в себя следующие технологические операции. «Навивка» является первой операцией, на которой осуществляется нагрев прутка, его навивка и закалка. Подрезка торцов пружины осуществляется на операции «Плазменная резка», на которой осуществляется «черновая» обработка, далее операция «Отпуск», для снятия внутренних напряжений пружины. Операция «Обработка торцов шлифованием» обеспечивает перпендикулярность и плоскостность торцов пружины, удовлетворяющих требованиям НТД. Следующая операция «Заневолка», на ней осуществляется заневоливание пружины. На операции «Дробенаклеп» происходит упрочнение поверхностного слоя пружины и подготовка еѐ поверхности к окраске. Проверка технических характеристик пружины на соответствие НТД осуществляется на операции «Приемо-сдаточные испытания». «Окраска» ‒ это последняя операция в производстве пружин, здесь осуществляется покрытие полимерной краской пружины.
На текущий момент «черновая» подрезка торцов пружины осуществляется РТК в составе: робот Kawasaki,, оборудование плазменной резки Kjellberg и устройство фиксации и подачи пружины в зону резки[1]. Окончательная обработка происходит на операции «Обработка торцов пружин шлифованием», которая является одной из «дорогих» операций в технологическом процессе, и исключение которой приведет к значительному экономическому эффекту и повышению производительности в целом.
Рассмотрев анализ работы РТК на протяжении одного года эксплуатации, выявлены следующие дефекты в обработке торцов пружин:
1. Перпендикулярность подрезки торца пружины в значительной степени зависит от расстояния между рабочей точкой режущего инструмента (плазмотрона) и поверхностью подрезаемого материала. Данное расстояние устанавливается вручную при обучении точек траектории движения инструмента, что представляет определенную сложность. На рис.1 представлен дефект вызванный неперпендикулярностью подрезки торца.
381
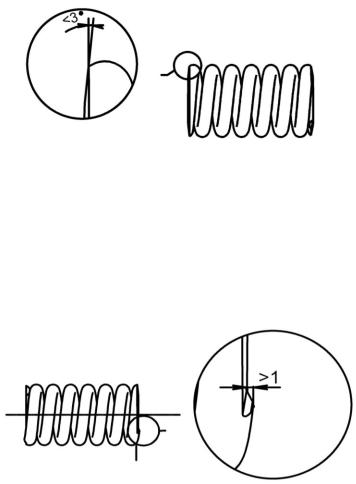
Рис. 1. Неперпендикулярность подрезки торца пружины
2. Процесс подрезки торцов пружины осуществляется при постоянном параметре «Ток реза» оборудования плазменной резки. Данный параметр устанавливается в зависимости от толщины прорезаемого материала, но так как процесс подрезки осуществляется по изменяемой геометрии толщины прорезаемого материала, также не обеспечивается перпендикулярность плоскости подрезки относительно плоскости, перпендикулярной оси подрезаемой пружины. Это происходит вследствие увеличения ширины реза при уменьшении толщины прорезаемого материала. Неперпендикулярность плоскости подрезки приводит к другому дефекту, дефекту «бугорок», приведенному на рис. 2.
Рис. 2. Неперпендикулярность подрезки и дефект «бугорок»
3. Попадание расплавленного металла на виток, «сдуваемого» с противоположной стороны факелом плазменной струи, приводит к изменению структуры металла, что в свою очередь приводит к изменению технических характеристик пружины. На рис. 3 показано положение режущего инструмента и место попадания расплавленного металла, которое условно представлено точками.
382
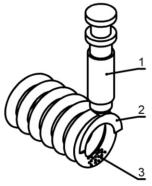
Рис. 3. Место попадания расплавленного металла: 1‒ режущий инструмент (плазмотрон); 2 ‒ обрабатываемая пружина; 3 ‒ место попадания расплавленного
металла
4. Для определения траектории движения режущего инструмента (плазмотрона) необходимо произвести ручное обучение точек движения в соответствии с углом подрезки торца пружины, заданного технологическими параметрами, на которое затрачивается время высококвалифицированного специалиста.
Также для повышения качества подрезки торцов пружины, удовлетворяющих требованиям НТД, были рассмотрены альтернативные виды обработки материалов ‒ это подрезка торцов шлифованием [2], лазерная резка [3], гидроабразивная резка [4] и плазменная резка [5]. Произведен технико-экономический расчет показателей, в том числе и для применяемого на текущий момент метода обработки торцов (плазменная резка и обработка торцов шлифованием) пружин, которые представлены в таблице.
Все данные были получены при одинаковых исходных параметрах обрабатываемой пружины, навитой из прутка Ø25 мм. В ходе анализа полученных данных установлено, что оптимальным видом обработки является плазменная резка.
Таблица Технико-экономические показатели методов обработки металла
Вид обработки |
Время обработки |
Качество подреза |
Стоимость обработки |
|
торцов пружины, сек |
после обработки |
торцов пружины, руб. |
||
|
||||
Подрезка торцов |
298 |
< Ra25 |
81,06 |
|
шлифованием |
|
|
|
|
Лазерная резка |
98 |
Ra10 ‒ Ra100* |
47,45 |
|
Гидроабразивная |
274 |
< Ra25 |
120,49 |
|
резка |
|
|
|
|
Плазменная резка |
34 |
≤ Ra25 |
12,76 |
|
Плазменная резка |
96 |
< Ra25 |
27,88 |
|
и обработка тор- |
|
|
|
|
цов шлифованием |
|
|
|
* ‒ зависит от толщины прорезаемого материала
383
Предполагается, что при решении следующих задач, будет обеспечена подрезка торцов пружин, удовлетворяющих требованиям НТД, только плазменной резкой, которая является самым оптимальным видом обработки торцов пружин.
1.Разработать математическую модель расчета координат точек траектории движения режущего инструмента, которая обеспечит его перемещение в соответствии с заданными техническими характеристиками пружины и технологии плазменной резки. Это позволит исключить операцию по ручному обучению точек движения траектории режущего инструмента (плазмотрона), на заданный угол подрезки, и обеспечить постоянное положение его рабочей точки над поверхностью прорезаемого материала.
2.Разработать математическую модель управления процессом плазменной резки в динамике, которая обеспечит управление параметром «Ток реза», оборудования плазменной резки, в зависимости от толщины прорезаемого материала, в режиме реального времени. Это позволит исключить изменение ширины реза, что в свою очередь обеспечит перпендикулярность подрезки торца и исключить дефект «бугорок».
Список литературы
1.Турыгин, Ю.В., Федоров, Д.Н. Анализ схем захвата заготовки. - Уфа: УГА-
ТУ, 2011. – 97 с.
2.Маслов, В. Н. Теория шлифования материалов. - М., «Машиностроение», 1974. - 320 с.
3.Григорьянц, А.Г., Соколов, А.А. Лазерная резка металлов: Учебное пособие для вузов. - М. «Высшая школа», 1988. – 127 с.
4.Сварка. Резка. Контроль: Справочник в 2-томах. - М., «Машиностроение», 2004. – 624 с.
5.Ширшов, И.Г., Котиков, В.Н. Плазменная резка. - Л. «Машиностроение», 1987. – 192 с.
Е. А. Решетова, аспирант
И. В. Абрамов, доктор технических наук, профессор Ижевский государственный технический университет имени М. Т. Калашникова
Система управления процессом формообразования внутренних отверстий
Растачивание отверстий является одной из трудно автоматизируемых операций, поэтому в последнее время наблюдается тенденция к интеллектуализации вспомогательных и режущих инструментов путем встраивания в их конструкции информационно-измерительных систем [1]. Применение измерительных средств и микропроцессорной системы управления
384
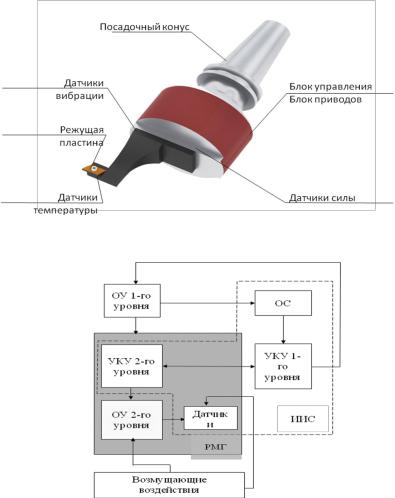
позиционированием резца в расточной мехатронной головке (РМГ) позволит увеличить возможности формообразования, а именно выполнять цилиндрические, ступенчатые, конусные и фасонные отверстия за один установ, что позволит сократить вспомогательное время, и самое главное управлять точностью получаемой геометрии.
На кафедре «Мехатронные системы» ИжГТУ им. М.Т.Калашникова уже несколько лет ведутся разработки в области интеллектуальных металлорежущих инструментов. Была создана модель РМГ (рис.1) [2].
Рис. 1. Модель РМГ
Общая структура системы управления РМГ представлена на рис. 2.
Рис. 2. Общая структура системы управления РМГ
В РМГ интегрировано устройство компьютерного управления (УКУ)
385
2-ого уровня (микроконтроллер), которая связана с УКУ 1-ого уровня (ЧПУ станка), информационно-измерительная система (ИИС), которая позволяет во время обработки получать информацию о процессе резания от датчиков силы, температуры и вибрации. Объектом управления (ОУ) 2- ого уровня является привод позиционирования резца, а ОУ 1-ого уровня – привод главных подач и главного движения станка. В данной статье рассмотрена разработка УКУ 2-ого уровня.
Математическая модель ОУ представлена параметрами, связывающими процесс резания и погрешность формообразования. При растачивании отверстий погрешность обработки вызвана многими факторами:
= y+н+ и+ т+ ст+ а+ з,
где y – погрешность, получаемая в результате упругих отжатий элементов технологической системы; н – погрешность установки инструмента на размер; и – погрешность в результате размерного износа режущего инструмента; т – погрешность, вызываемая температурными деформациями технологической системы; ст – погрешность, вызываемая геометрическими неточностями станка; а – погрешность, вносимая системой программного управления; з – погрешность в результате деформаций технологической системы от зажимных сил; ‒ допуск на обрабатываемый размер детали.
Совокупное действие этих факторов приводит к отклонениям параметров технологического процесса от заданных. Поэтому достигнуть требуемое качество отверстий можно в случае использования текущей информации о ходе технологического процесса для формирования структуры САУ и выбора ее параметров в условиях изменения внешних воздействий и свойств объекта управления [3].
Общая функциональная структура системы управления приведена на рис. 3. Объектом управления является процесс растачивания вместе с мехатронным модулем движения резца. Технологический процесс характеризуется силой резания и положением резца z и может быть представлен в виде траектории движения его режущей кромки. Системой автоматического управления процессом растачивания отверстий выполняет условия обеспечения формирования траектории и сравнение ее с эталонной траекторией с последующим принятием решения. Кроме того обеспечивает с высокой точностью скорость программного движения. Структурная схема включает в себя два взаимодействующих уровня управления: нижний уровень управления, осуществляющий непрерывное управление технологическим процессом и верхний уровень управления, осуществляющий контроль процесса и выбор требуемых параметров регулирующего воздействия на объект управления в функции отклонения текущего представления качества о процессе с его эталонной моделью, заданной черте-
жом [4].
386
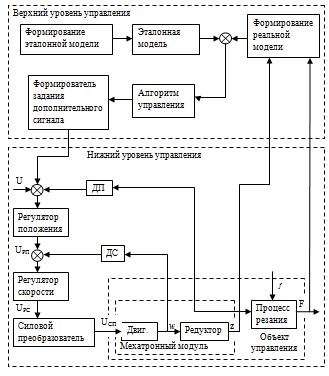
Рис. 3. Общая функциональная структура системы управления
Верхний уровень управления выполняет функции формирования эталонной модели процесса на основе получаемых технологических портретов в виде аппроксимирующей функции траектории движения резца F=f(z), контроля за состоянием объекта управления, ввода корректирующего воздействия в зависимости от возникающего рассогласования текущего состояния F=f(z) от эталонной модели, разработки закона управления.
Нижний уровень управления реализует выбранную тактику регулирования и обеспечивает непосредственное выполнение задач по непрерывному управлению объектом с помощью задатчика входных сигналов, контуров управления и корректирующего устройства.
Структурную схему системы управления процессом растачивания отверстий строим на основе применения микроконтроллера MSP430F4211 фирмы Texas Instruments, так как он обладает значительными вычислительными и логическими возможностями. Цифровое управление имеет ряд преимуществ, таких как: высокая точность измерений; использование цифровых сигналов, датчиков и преобразователей; меньшая чувствительность к шумам и помехам; возможность легко изменять алгоритм управ-
387

ления в программном обеспечении [5].
Упрощенная функциональная цифровая система автоматического управления показана на рис. 5, где:
СП – силовой преобразователь; ОУ – объект управления;
ЦВМ – цифровая вычислительная машина; ЦАП – цифро-аналоговый преобразователь; АЦП – аналого-цифровой преобразователь.
Структура системы включает в себя логико-динамическую структуру, осуществляющую контроль силы резания в функции перемещения резца и реализованную в виде алгоритма управления, а также контур положения, осуществляющий контроль позиционированием резца, и контур скорости, обеспечивающий требуемую скорость растачивания.
Рис. 5. Блок-схема системы автоматического управления
Разработана общая структура системы управления расточной мехатронной головкой, которая позволяет во время обработки получать информацию о процессе резания от датчиков силы, температуры и вибрации. Общая функциональная структура системы управления включает два взаимодействующих уровня: нижний (тактический) уровень, осуществляющий непрерывное управление технологическим процессом (скорости и положения резца), и верхний (стратегический) уровень, осуществляющий контроль процесса и выбор регулирующего воздействия на объект управления. Сформирована математическая модель системы управления, которая служит основанием для разработки алгоритмов управления и выбора соответствующих интеллектуальных микропроцессорных и программных средств.
Список литературы
1.Kruszynski, J., Hasselkruss, E. Mechatronische Werkzeuge setzen sich durch // Werkstatt&Betrieb, 2003. – 7-8. – PP.16-18.
2.Мехатронная расточная головка: пат. 111789 Рос. Федерация: МПК В23В 29/00 / Абрамов И.В., Абрамов А.И., Караваев Ю.Л., Коренева Е.А., Лекомцев П.В., Никитин И.А.; заявитель и патентообладатель ФГБОУ ВПО Ижевский госу-
388
дарственный технический университет. - №2011130269/02; заявл. 20.07.2011; опубл. 27.12.2011, Бюл. №36. – 2 с.
3.Математические модели, динамические характеристики и анализ систем автоматического управления / под ред. К.А. Пупкова, Н.Д. Егупова. – М.: Изд-во МГТУ, 2004. – 656 с.
4.Гудвин, Г.К. Проектирование систем управления / Г.К.Гудвин, С.Ф. Гребе, М.Э. Сальгадо.- М.: БИНОМ. Лаборатория знаний, 2010. – 911 с.
5.Бесекерский, В.А. Цифровые автоматические системы / В.А.Бесекерский.- М.: Изд-во Наука, 1976. – 576 с.
А. В. Романов, аспирант
А. И. Абрамов, кандидат технических наук И. В. Абрамов, доктор технических наук, профессор
Ижевский государственный технический университет имени М. Т. Калашникова
Информационно-измерительная система автоматической установки для гидропрессовой сборки соединений с натягом
При сборке гидропрессовых соединений в автоматическом режиме необходимо систематическое получение информации, характеризующей истинное состояние процесса в каждый момент времени. Получаемая информация должна иметь комплексный характер и непрерывно поступать во время выполнения процесса, обладая при этом минимальным временем запаздывания.
Важнейшей задачей при автоматической гидропрессовой сборке является обеспечение ее режимов и условий, поэтому за показатель, характеризующий прочность соединений с гарантированным натягом, принимается давление масла qM. Давление во время сборки является критическим параметром, определяющим несущую способность соединения. При давлении масла ниже рабочего наблюдаются задиры на сопрягаемых поверхностях деталей, повышенное же давление значительно снижает прочность охватывающей детали по причине возникновения пластических деформаций. Кроме того, ввиду высоких давлений (до 200 МПа) требуется принимать во внимание его влияние на вязкость используемой рабочей жидкости (вязкость с увеличением давления возрастает), что необходимо учитывать при назначении скорости сборки в автоматическом режиме.
Согласно [1] гидропрессовый метод сборки соединений с натягом характеризуется наличием участка сухого трения l1, на котором происходит сжатие масла в полости между втулкой и валом, масляная прослойка между деталями начинает формироваться. Кривая давления qM имеет резкий подъем, в дальнейшем кривая принимает пологий характер, давление масла растет незначительно.
389
Другим важным параметром процесса сборки является сила запрессовки FЗ. По величине силы возможно определить на какой стадии находится процесс сборки в текущий момент времени.
Обычно различают четыре стадии гидропрессовой сборки:
1.Подвод шпинделя к торцу запрессовываемого вала и поджим его. Сила запрессовки минимальна либо равна нулевому значению.
2.Запрессовка в режиме сухого трения. Сила запрессовки стремительно растет, кривая запрессовки FЗ (l) имеет резкий подъем.
3.Запрессовка в режиме жидкостного трения. Происходит стабилизация процесса сборки, сила запрессовки возрастает незначительно.
4.Отвод шпинделя от вала. Возврат в исходное положение. Температура масла tМ также является немаловажным фактором, состо-
яние которого необходимо контролировать в процессе запрессовки. При запрессовке происходит разогрев рабочей жидкости, ее вязкость снижается, вследствие этого ухудшаются эксплуатационные характеристики масла, применяемого при сборке, что отрицательно влияет на стабильность процесса. Следовательно, необходимо учитывать изменение вязкости жидкости при назначении скорости запрессовки в автоматическом режиме.
Впроцессе сборки необходимо в режиме реального времени контролировать положение вала. Кроме того, путем контроля длины запрессовки
lЗ возможно установить длину участка сухого трения l1, что позволит оптимизировать геометрию заходных фасок вала и втулки, и тем самым положительно скажется на процессе сборки путем уменьшения длины участка l1.
Вкачестве вспомогательного параметра возможно учитывать утечку
масла QМ, контролирование данного параметра позволит установить характер трения на заходной кромке втулки: сухое или полусухое.
При сборке соединений с натягом гидропрессовым методом важным
условием является обеспечение постоянства давления масла qM [2]. При использовании схемы с подводом масла с торца соединения появляется избыточный объем масла, для протекания которого через зазор необходимо определенное время. Одним из путей решения данной проблемы является регулирование скорости запрессовки Vз. Возможность реализации
систем автоматического управления, использующих зависимость qM(Vз) в целях обеспечения стабильности технологического процесса, появилась с введением в контур управления современных микропроцессорных средств.
Таким образом, для получения комплексной информации о течении процесса гидропрессовой сборки информационно-измерительная система (ИИС) должна включать в себя следующие измерительные средства:
‒ датчики давления; ‒ датчики силы;
‒ датчики температуры; ‒ датчики скорости;
390
‒ датчики перемещения.
Структурная схема ИИС автоматической установки для гидропрессовой сборки соединений с натягом приведена на рис. 1.
Датчик
давления
Датчик
силы
Управлющий |
|
Микроконтроллер |
компьютер |
|
|
|
|
Датчик |
Датчик |
Датчик |
перемещения |
скорости |
температуры |
|
Рис. 1. Структурная схема ИИС |
|
Устройство управления, реализованное на базе персонального компьютера, осуществляет управление процессом запрессовки.
Для сбора и обработки сигналов с датчика перемещения, датчика скорости, датчика температуры, а также для передачи обработанных данных в управляющую программу устройства управления используется микроконтроллер.
Для измерения силы запрессовки и давления масла используются цифровые манометры.
В качестве датчика скорости и перемещения используется энкодер, Для измерения температуры масла применяется термопара, имеющая высокую чувствительность и обладающая низкой теплоемкостью, что позволяет оперативно контролировать быстроизменяющуюся температуру масла в момент запрессовки. Сигналы с энкодера и датчика температуры обрабатываются с помощью микроконтроллера, и далее обработанные данные отправляются на управляющий компьютер.
Разработанная ИИС автоматической установки для гидропрессовой сборки соединений с натягом позволит оперативно получать комплексную информацию о течении процесса запрессовки. Выбор информационных каналов обусловлен основными технологическими параметрами сборочного процесса: силы запрессовки FЗ, давления масла qM, температуры
391
рабочей жидкости tМ, длины запрессовки lЗ, так и параметров зависящих от них: вязкости масла η, скорости запрессовки Vз, так как они координальным образом влияют на характеристики соединения и поэтому контроль изменения данных параметров позволит назначить оптимальный режим сборки, и тем обеспечит получение качественных соединений с гарантированным натягом.
Список литературы
1.Теория и технология гидропрессовых соединений [Текст]: монография / Щенятский А.В., Абрамов И.В., Соснович Э.В. и др. Ижевск: изд-во ИжГТУ, 2012.
-496 с.: ил. – (Монографии ИжГТУ).
2.Абрамов А.И. Научно-технические аспекты автоматизации гидропрессовой сборки соединения с натягом. [Текст] / Абрамов А.И., Абрамов И.В., Романов А.В. // Сборка в машиностроении и приборостроении. - 2013. - №1. - С.16-19.
П. А. Романов, магистрант С. А. Трефилов, кандидат технических наук, доцент
Ижевский государственный технический университет имени М. Т. Калашникова
Разработка лабораторной установки для исследования определения степени загрязнения
технологических сукон
Технологический процесс на бумагоделательных машинах в принципе один и тот же, в него входят несколько основных операций. Одна из таких операций это прессование мокрого листа бумаги и удаление избытка воды.
Пройдя сеточную часть машины, бумажное полотно с содержанием сухого вещества около 15‒20% поступает в прессовую часть, где оно подвергается дальнейшему уплотнению и обезвоживанию до сухости 30-40% методом механического отжатия влаги между прессовыми валами на упругой подкладке из шерстяной ткани [1]. При отжиме влаги на прессах изменяется ряд свойств бумаги: повышается объемный вес, снижается пористость, воздухопроницаемость, впитывающая способность, увеличивается механическая прочность по сопротивлению разрыву, излому и продавливанию, повышается прозрачность.
При прессовании применяют технологические сукна, которые предохраняют слабое бумажное полотно от разрушения, пропускают отжатую влагу и одновременно транспортируют бумагу от пресса к прессу и далее
ксушильным, цилиндрам.
Втехнологические сукна при прессовании попадают различные посторонние включения минерального и волокнистого происхождения от бу-
392
мажного полотна.
Загрязнение сукна вызывает:
−снижение впитывания влаги из бумажного полотна;
−переход загрязнения в бумажное полотно, что снижает качество бумаги;
−увеличивается влажность бумажного полотна, что вызывает значительное увеличение энергозатрат на высушивание излишней влаги.
Поэтому его надо со временем очищать от загрязнений. Вот здесь и необходимо применение автоматизированных устройств определения степени загрязнения, чтобы вовремя определить загрязнение и очистить сукно.
Для удаления посторонних включений используют различные устройства промывки и очистки. На сегодняшний день необходимость промывки сукна определяется «на глаз» или его промывка осуществляется непрерывно, это приводит к перерасходу воды и износу сукна. Для определения уровня загрязнения сукна предлагается измерять его воздухопроницаемость.
Воздухопроницаемость определяют в различных отраслях производства. Нас же интересует определение воздухопроницаемости в текстильных материалах и изделиях, так как технологическое сукно является текстильным изделием. Для текстильных материалов и изделий из них, существует стандартный метод определения воздухопроницаемости, ГОСТ
РИСО 9237–99, воздухопроницаемость определяется как, скорость воздушного потока, проходящего перпендикулярно через испытываемую точечную пробу при заданных значениях площади испытываемой поверхности точечной пробы, перепада давления и промежутка времени[2].
Разрабатываемый мной способ определения воздухопроницаемости использует импульсный метод подачи воздуха. Предлагаемый метод заключается в подаче воздуха порциями через технологическое сукно. Данные, полученные с устройства, записываются в специальный программный продукт, где они анализируются.
Метод предполагает наличие пневматического аккумулятора определенного объема, в который подается воздух из пневмосети предприятия, до определенного давления. Как только давление в аккумуляторе достигнет заданного значения, подача воздуха из пневмосети прекращается. Далее, воздух из аккумулятора пропускается через точечный образец сукна в атмосферу и измеряется время, через которое давление в пневматическом аккумуляторе сравняется с атмосферным давлением. Зная объем аккумулятора, начальное давление измерения, время за которое давление в аккумуляторе сравнялось с атмосферным давлением, площадь измеряемого образца, можно получить стандартный показатель воздухопроницаемости.
Исследуемый метод позволяет получить следующие преимущества перед аналогичными устройствами:
−повышение точности уровня загрязнения;
393
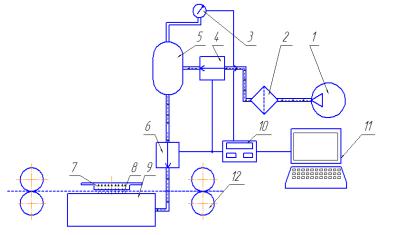
−работа устройства не зависит от качества пневмосети предприятия;
−исключено попадание загрязнения из сукна в устройство.
Схема лабораторной установки для измерения воздухопроницаемости методом импульсной подачи воздуха приведена на рис. 1.
Рис. 1. Схема экспериментального стенда для измерения воздухопроницаемости методом импульсной подачи воздуха: 1 – компрессор; 2 – фильтр; 3 – датчик давления; 4, 6 – клапан; 5 – пневматический аккумулятор; 7 – прижимное кольцо; 8 – испытуемый материал; 9 – столик; 10 – контроллер;
11 – ЭВМ; 12 – прессовые валы
Предполагается, что установка будет упрощена. В дальнейшем необходимо построить математическую модель и провести опыты со стационарным и импульсным методами определения воздухопроницаемости, что является целью дальнейших исследований.
Список литературы
1.Иванов, С.Н. Технология бумаги издание третье. М.: Изд-во «Школа бума-
ги», 2006.
2.ГОСТ 9237-99 Материалы текстильные. Метод определения воздухопроницаемости.
394
Л. С. Сергеев, магистрант Ю. Р. Никитин, кандидат технических наук, доцент
Ижевский государственный технический университет имени М. Т. Калашникова
Система диагностирования асинхронных двигателей на основе аппарата нечеткой логики
В настоящее время диагностике систем приводов уделяется большое внимание. На производстве широкое применение находят асинхронные двигатели. Существуют различные методы диагностики асинхронных двигателей и машин [1–6]. Наиболее широкое распространение получили следующие методы: методы искусственного интеллекта (нейронные сети, системы нечѐткого вывода, генетические алгоритмы, экспертные системы), методы спектрального анализа (методы вибродиагностики, методы акустической диагностики), методы электромагнитной диагностики, методы температурного контроля.
Вышеназванные методы диагностики реализованы в различных диагностических приборах и системах. Например, прибор AM Test2 компании «Вибро-Центр» предназначен для комплексного контроля состояния электрических машин. При помощи данного прибора в режиме мониторинга контролируется вибрационное состояние, параметры энергопотребления, проводится диагностика состояния электродвигателя [7]. Система КОМПАКС®-РПЭ предназначена для диагностики технического состояния электродвигателя по вибрации, температуре и току с регистрацией измеренных параметров. Система позволяет производить диагностику до восьми электродвигателей одновременно [8]. Система диагностики электродвигателей МСМ ‒ это устройство, предназначенное для контроля трехфазных электродвигателей, электроприводов и оборудования промышленного назначения. MCM помещается в небольшом корпусе и ее можно установить в систему управления двигателя. После завершения фазы обучения, система начинает контролировать работу двигателя, обрабатывая данные двигателя в реальном времени [9]. Рассмотренные в качестве примера системы диагностирования отличаются набором измеряемых параметров, количеством устанавливаемых датчиков, набором выявляемых дефектов, используемыми алгоритмами диагностирования, возможностью интеграции в SCADA – системы и возможностью выдачи акта по окончании диагностики.
Для создания конкурентоспособной системы диагностирования выявлены и проанализированы дефекты, возникающие при эксплуатации асинхронных двигателей, их причины, а также закономерности между дефектами и диагностическими параметрами. На основе этих данных, а также на основе показаний с группы датчиков сформирована база правил для системы нечѐткого вывода.
395
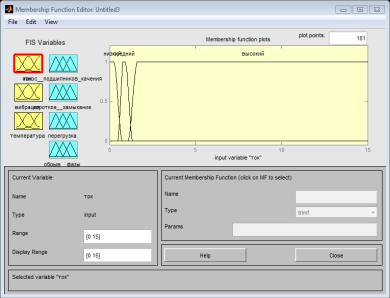
Основными причинами выхода из строя асинхронного двигателя являются повышенное нагревание частей электродвигателя, повреждение изоляции обмоток, дефекты подшипников качения, причины электрического характера.
Вразработанной системе диагностирования информация об объекте регистрируется группой датчиков, измеряющих следующие физические величины: вибрацию, ток, температуру. Эти величины являются входными параметрами для системы диагностирования.
Модель системы диагностики разработана с использованием набора инструментов Fuzzy logic программного продукта Matlab. Диагностические параметры являются входными параметрами для системы диагностирования. В качестве входных лингвистических переменных, в модели используются следующие диагностические параметры:
X1 – ток статора (от 0 до 15 А);
X2 ‒ вибрация (диапазон от 100 до 10000 Гц); X3 – температура (диапазон от 0 до 200 °C).
Вкачестве выходных лингвистических переменных используются следующие параметры:
Y1 – износ подшипников; Y2 – короткое замыкание;
Y3 – обрыв одной из фаз обмотки; Y4 – перегрузка двигателя.
Рис. 1. Функция принадлежности для параметра «ток»
396
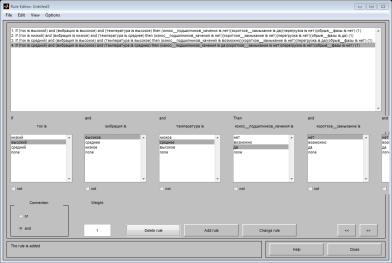
Пример функции принадлежности для одного из диагностических параметров приведен на рис. 1. Множество термов для переменной «вибрация» состоит из следующих термов: «низкий уровень», «средний уровень», «высокий уровень». Каждый из этих термов описывает некоторый, определѐнный диапазон частот. Аналогично выглядят множества термов для остальных лингвистических переменных. Выходными переменными в данном случае являются возможные дефекты асинхронного двигателя. Процедура нечѐткого вывода осуществляется в соответствии с составленной базой правил, которая изображена на рис. 2.
Рис. 2. Пример задания базы правил
В основе системы диагностирования асинхронных двигателей лежит крейтовая система сбора данных LTR-22. На основе разработанной модели будет разработано программное обеспечение для измерения, обработки данных и принятия решения о техническом состоянии асинхронных двигателей.
Список литературы
1.Основные направления технической диагностики // Сайт Мехатроника: Сборник статей технической тематики. URL: http://mehatronics.ru/?p=651 (дата обращения 05.02.2013).
2.Nikitin, Y., Abramov, I. Mechatronic modules diagnosis by use of fuzzy sets. – Proceedings of 14-th International Conference on Mechatronics. – 1-3 June, 2011. – Trencinske Teplice, Slovakia. – P. 109 –111.
3.Никитин, Ю.Р. Диагностирование мехатронных систем: учеб. пособие / Ю. Р. Никитин, И. В. Абрамов. – Ижевск : Изд-во ИжГТУ, 2011. – 116 с.
397
4.Никитин, Ю.Р. Интеллектуальные узлы машин с функциями диагностики // Вибродиагностика, триботехника, вибрации и шум: Монографический сборник материалов семинара VII Международной научно-технической конференции «Со- циально-экономические и экологические проблемы лесного хозяйства» / Под ред. А.А.Санникова и Н.В.Куцубиной. – Екатеринбург: Уральск. гос. лесотехн. уни-
верситет, 2009. – С. 120-124.
5.Никитин, Ю.Р., Абрамов, И.В. О построении системы диагностирования станков c ЧПУ // Мехатроника, автоматизация, управление. – 2011. – № 4. – С.32–35.
6.Božek Pavol, Moravčík Oliver, Štollmann Vladimír, Šuriansky Jozef, Prajová Vanesa, Waleková Gabriela Virtual program imported into the real technological work-
place // Annals of DAAAM and Proceedings of DAAAM Symposium. - Vol. 19, No.1. Annals of DAAAM for 2008 & Proceedings of the 19th International DAAAM Symposium «Intelligent Manufacturing & Automation: Focus on Next Generation of Intelligent Systems and Solutions», 22-25th October 2008, Trnava, Slovakia. - Viedeň : DAAAM International, 2008. P. 157-158.
7.Прибор AM-Test2 // Сайт компании ООО «Элиз»
URL:http://www.elizpribor.ru/products/2752.htm (дата обращения 05.02.2013).
8.Система КОМПАКС-РПЭ // Сайт научно-производственного центра «Дина-
мика». URL: http://www.dynamics.ru/content/view/366/74/ (дата обращения 05.02.2013).
9.Мониторы состояния двигателя МСМ // Сайт группы компаний «Симмет-
рон». URL: http://www.symmetron.ru/suppliers/iskra/pdf/iskra-131-133.pdf (дата об-
ращения 05.02.2013).
А. Н. Степанов, магистрант; А. В. Романов, аспирант
А. И. Абрамов, кандидат технических наук И. В. Абрамов, доктор технических наук, профессор
Ижевский государственный технический университет имени М. Т. Калашникова
Управление давлением и расходом масла при гидропрессовой сборке с использованием регулятора грузового типа
Для обеспечения качества сборки гидропрессовых соединений возникает необходимость поддержания заданного давления масла и отведения избыточного объема из рабочей зоны [1]. При использовании технологической схемы подвода масла с торца образуется значительный избыточный объем масла. Для сохранения давления в системе используют дроссель. Но при включении дросселя в систему наблюдается дискретность подачи смазки в зону сопряжения, что отрицательно влияет на качество получаемых соединений. Для решения данной проблемы необходим регулятор, поддерживающий постоянное давление на протяжении всего процесса запрессовки и обеспечивающий непрерывную подачу смазки в зону сопряжения.
398
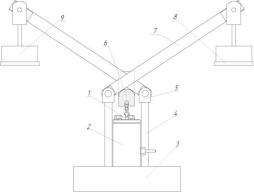
Проведенный анализ схем устройств для поддержания и регулирования давления показал, что решение данной задачи возможно путем применения гидроаккомулятора грузового типа. Преимуществом выбранного типа конструкции является поддержание постоянного рабочего давления и простота конструкции. Конструкция регулятора состоит из двух элементов: основного блока регулирования, включающего в себя корпус регулятора (2) и регулирующий элемент – плунжер (1), и исполнительного устройства ‒ рычажного механизма, состоящего из двух рычагов (7) с грузом (9), закрепленного на платформе (8). Регулятор позволяет поддерживать заданное давление на протяжении всего процесса запрессовки. Рычаги соединены с колонами (4) через проушины (5). Поступательное движение плунжера передается на рычаги через седло (6). Корпус регулятора и стойки закреплены на основании (3). Общий вид регулятора представлен на рис. 1.
Рис. 1. Общий вид регулятора: 1 ‒ плунжер; 2 ‒ корпус регулятора; 3 ‒ основание; 4 ‒ стойка; 5 ‒ проушина; 6 ‒ седло; 7 ‒ рычаг; 8 ‒ платформа; 9 – груз
Разработанная конструкция регулятора включает высокопрочный корпус (2) с установленным в нем регулирующим элементом, состоящим из корпуса (3) и плунжера (1), который взаимодействует с исполнительным механизмом, изменяющим положение плунжера. Регулирующий элемент представляет собой стандартную плунжерную дизельной аппаратуры, основными параметрами которой является диаметр 9мм и ход 27мм.
Избыток масла поступает через штуцер (4) в полость корпуса регулятора. Затем, по мере заполнения полости корпуса маслом, плунжер (1), к которому приложена противодействующая сила, создаваемая весом груза и усиливаемого системой рычагов под давлением масла начинает перемещаться, освобождая пространство для поступающего масла из зоны запрессовки. На рис. 2. представлен основной блок регулятора.
399
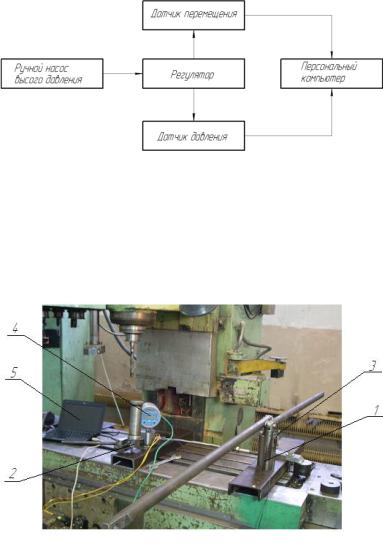
Рис. 3. Структурная схема экспериментальной установки
Ручной насос высокого давления (2) применяется для создания давления масла в системе. Для контроля перемещения плунжера относительно корпуса применяется датчик перемещения индуктивного типа (3), для измерения давления масла в системе используется цифровой манометр (4), сбор информации с датчиков и ее обработка осуществляется с помощью персонального компьютера (5). Общий вид экспериментальной установки представлен на рис. 4.
Рис. 4. Общий вид экспериментальной установки
Требуемый вес груза, приходящийся на один рычаг, при рабочих давлениях 200 и 400 МПа рассчитывается согласно формуле [1].
|
|
|
p |
200 |
r |
2 l |
m |
200 106 |
3,14 ( 4,5 10 3 |
)2 |
9 24 кг |
m |
|
|
|
1 |
|
|
|
||||
200 |
|
|
|
|
|
|
|
||||
|
|
|
2 |
g l2 |
1 |
|
2 9,8 20 |
|
|
||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
401 |
|
|
|

прогнозировать наступление предельного состояния и предотвращать наступление вторичных отказов.
В ходе исследования было определено, что для проведения комплексной диагностики разрабатываемая система должна включать в себя набор высокопроизводительных аппаратных средств, имеющих возможность быстрого реконфигурирования под необходимое оборудование [1]. Это достигается путем использования универсальных устройств с возможностью программирования их под нужные задачи.
Одним из наиболее удачных средств для поставленных целей является оборудование компании National Instruments, в частности приборы NI PXI (PXI – PCI eXtention for Instrumentation) [2].
Основным достоинством таких устройств является модульность, что позволяет путем наращивания приборов прийти к оптимальному и универсальному решению проблем диагностики.
Рынок PXI-продукции постоянно растет и развивается – только на сегодня можно рассчитывать более чем на 1150 различных измерительных модулей, с которым возможно создать то оборудование, которое лучше всего подходит заданных целей.
В своем составе устройство имеет встраиваемый контроллер, управляемый операционной системой Windows, а также программным обеспече-
нием LabVIEW Real-Time.
Его можно дополнить модулями для сбора, диагностики и анализа данных, коммутационными модулями, модулями для контроля движения
исистем технического зрения с поддержкой различных типов шин на платформе PXI.
Архитектура PXI позволяет использовать высокоскоростные и многоядерные процессоры для работы в приложениях, требующих математической обработки данных и сложного анализа.
Блок сбора информации с диагностических датчиков [1] представляется в виде универсального высокоскоростного 16-битного модуля вводавывода NI PXI-6254, позволяющего подключать до 80-ти аналоговых входных сигналов. Датчики подключаются непосредственно к соединительному блоку NI SCB-68, что обеспечивает простоту и универсальность.
В качестве программой среды используется специализированное обеспечение LabView, которое является удобным программноаппаратным комплексом для разработки приложений, позволяющих осуществлять опрос датчиков, установленных на объекте исследования и обработку полученной информации. В настоящее время программное обеспечение National Instruments LabView является стандартом в системах сбора данных. Использование программного комплекса дает неоспоримые преимущества:
быстрота внедрения;
простота применения;
доступность по стоимости;
403
наглядное графическое программирование;
обеспечение модернизации программного кода;
минимальное время изучения основ программирования;
поддержка широкого спектра измерительного оборудования, в том числе сторонних производителей;
широкие возможности обработки полученных результатов измере-
ний;
«кроссплатформенность» - работа с различными операционными системами и платформами, в том числе с операционными системами «реального времени».
Большинство сред разработки не позволяют вести одновременно и сбор данных, и их отображение в одном приложении. Типичный продукт
–это либо язык программирования общего назначения с минимумом библиотек для обработки сигналов, пригодный в основном для разработки приложений по сбору данных, либо среда с огромным количеством инструментов для анализа сигналов, но ограниченной поддержкой работы с оборудованием. В результате приходится тратить время на конвертацию и передачу данных из одного приложения в другое. В отличие от подобных приложений LabVIEW с самого начала разрабатывалась как среда, позволяющая вести и сбор данных, и их одновременный анализ [2, 3].
В разрабатываемой системе комплексной диагностики используются следующие датчики:
‒ акустической эмиссии; ‒ вибропреобразователи;
‒ тока (пересчитывается потребляемая мощность двигателем); ‒ пирометр (выделяются наиболее «горячие» узлы);
‒ температуры (разница с окружающей средой; считается время работы двигателя и оценивается его нагрев).
При помощи каждого из датчиков выявляется определенный дефект соответствующего узла. Данный подход позволяет наиболее полно изучить текущее состояние оборудования.
На этапе определения соответствий между выявленным дефектом и конкретной неисправности оборудования необходимо использовать некоторую базу правил. Такую базу можно составить и легко применять на основе модульного прибора с программируемой FPGA-матрицей с возможностью автономной работы NI PXI-7813R.
В процессе работы система должна выработать предположение о соответствующей неисправности. Далее по аналогии происходит анализ сигналов с остальных датчиков, установленных на данном узле, и уже в совокупности система принимает окончательное решение.
На следующем этапе выявляется остаточный ресурс работы диагностируемого оборудования (с привязкой к конкретному узлу). Дается некоторое представление о степени развития дефекта (из анализа тренда). Ес-
404
ли тренд увеличивается, то дефект развивается. Скорость изменения этого тренда может напрямую зависеть от остаточного ресурса диагностируемого оборудования [4]. Если был обнаружен зарождающийся дефект, то данный ресурс определяется с точностью до месяца, чтобы запланировать ремонтные работы.
В конечном итоге система диагностики, основанная на оборудовании National Instruments, а в частности с использованием модульных приборов NI PXI, позволяет производить широкий спектр действий – от сбора данных и их обработки до выдачи итогового результата о состоянии диагностируемого объекта в целом.
Кроме того на базе среды программирования LabView возможно создать конечный продукт с «дружелюбным» пользовательским интерфейсом с максимумом возможностей как для оператора, производящего сам процесс диагностики, так и для эксперта (наладчика), осуществляющего поддержку, настройку и проверку системы.
Список литературы
1. Степанов, П.И. Разработка модели системы комплексной диагностики электромеханического привода [Текст] // Инновационные технологии и экономика в машиностроении: сборник трудов III Международной научнопрактической конференции с элементами научной школы для молодых ученых: в 2-х т. / Юргинский технологический институт. − Томск: Изд-во Томского политехнического университета, 2012. − Т.1. – С. 341 – 344.
2.National Instruments Россия, СНГ и Балтия [Электронный ресурс]. – Режим доступа: http://russia.ni.com/
3.Суранов, А.Я. LabVIEW 7: справочник по функциям [Текст] - М.: ДМК пресс, 2005. – 512 с.
4.Болотин, В.В. Прогнозирование ресурса машин и конструкций. [Текст] - М.: Машиностроение, 1984. – 312 с.
К. Л. Столбов, магистрант Ю. Р. Никитин, кандидат технических наук, доцент
Ижевский государственный технический университет имени М. Т. Калашникова
Разработка автоматизированного диагностического комплекса для контроля электрических двигателей
Развитие научно-технического прогресса в измерительной и микропроцессорной технике, успехи в методах искусственного интеллекта дают импульс для развития технической диагностики мехатронных систем. В мехатронных системах в основе электрических приводов используются асинхронные двигатели, двигатели постоянного тока, синхронные и шаговые двигатели.
405
Асинхронные двигатели благодаря своей дешевизне, простоте конструкции, надежности и недорогому техническому обслуживанию стали занимать лидирующие позиции в современном автоматическом оборудовании. Асинхронные двигатели широко распространены в промышленности и по оценкам экспертов потребляют более 70% всей производимой электрической энергии. Имеется тенденция расширения их использования благодаря достижениям в области микропроцессорной техники и силовых приборов – MOSFET, IGBT транзисторов. Поэтому вопросы надежности и безотказности асинхронных двигателей являются весьма актуальными. Об актуальности диагностирования асинхронных двигателей говорит и то, что значительно увеличилось количество исследовательских работ по данной теме.
Неисправность двигателя приводит к остановке оборудования, непрерывного производства и финансовым потерям предприятия. Поэтому необходимы инструменты мониторинга текущего состояния двигателей. Мониторинг привода может быть определѐн как процесс измерения и анализа рабочих характеристик и диагностических параметров привода таким образом, что результаты анализа могут быть использованы для определения текущего технического состояния привода и прогнозирования его ремонта, предупреждения аварий. Непредвиденный дефект или отказ оборудования могут привести к серьѐзной аварии и финансовым потерям для предприятия.
В настоящее время достаточно актуально применение интеллектуальных систем защиты и диагностики приводов, позволяющих выполнять диагностику двигателей с учетом их мощности и конструкции. Современные системы и методы диагностики приводов можно разделить на две группы.
К первой группе относятся методы тестовой диагностики, требующие формирования искусственных возмущений, воздействующих на изучаемый объект: измерение сопротивления изоляции, токов утечки, внутреннего сопротивления обмоток, тангенса угла диэлектрических потерь обмоток, метод высоковольтного импульса и др.
Вторая группа включает в себя методы оперативной или функциональной диагностики, используемые в первую очередь для электрооборудования, являющегося источником естественных возмущений в процессе работы.
Кроме этого каждая группа подразделяется ещѐ на две – это методы, позволяющие выявить неисправность электрооборудования в целом и методы, выявляющие и локализующие конкретную неисправность или дефект в электрооборудовании.
По этим причинам необходимо применение методов диагностики не только относящихся к категории функциональных, но и позволяющих выявить дефект конкретной части электрооборудования. К тому же методы функциональной диагностики экономически наиболее предпочтитель-
406
ны, так как не требуют даже временного вывода электрооборудования из эксплуатации.
Исследователями был предложен ряд методов диагностирования неисправностей электрических машин мехатронных систем [1–8]. Сложность разработки универсальной системы диагностики заключается в том, что не всегда возможно найти закономерности между неисправностями, их причинами и диагностическими параметрами. Тем не менее, человек может дать экспертную оценку о состоянии приводов на основе накопленного опыта и знаний. Но из-за дефицита квалифицированных работников и повышающихся требований к системам автоматизации, исследователи пытаются использовать методы искусственного интеллекта.
На сегодняшний день множество фирм занимается производством приборов и систем для технической диагностики. В качестве примера можно назвать приборы для проверки обмоток электродвигателей (DSL 8240, ИДВИ-03, ИДО-05 – «ОПТИМУМ») и контроля вибрации роторных машин и подшипников (ИБР-01, ИДП-05 – «ОПТИМУМ»).
В результате анализа неисправностей асинхронного двигателя выявлены следующие неисправности:
1)неисправности статора, заключающиеся в замыкании накоротко одной или нескольких его обмоток;
2)неправильное соединение обмоток статора;
3)неисправное короткозамкнутое кольцо или неисправный ротор;
4)статическая или динамическая неравномерность воздушного зазора;
5)неисправность вала, которая может привести к возникновению трения между ротором и статором и, следовательно, к серьѐзной поломке;
6)неисправная коробка передач или подшипник.
Данные неисправности ведут к следующим последствиям:
1)дисбаланс напряжения, индуцируемого в воздушном зазоре, и линейных токов;
2)возросшие пульсации момента;
3)сниженный средний развиваемый момент;
4)повышенные потери и уменьшение эффективности работы;
5)сильный нагрев.
Исследования показали, что каждый тип неисправности ассоциируется с соответствующей частотной составляющей в фазном токе статора. Частотные составляющие тока статора можно разделить на две отдельные группы:
1) спектральные составляющие:
а) частоты возбуждения, гармоники питания; б) пространственные гармоники, связаны с пространственным распо-
ложением обмотки; 2) анормальные спектральные составляющие:
а) в результате неисправностей статора; б) неправильная установка;
407
в) изменение нагрузки.
Анализ диагностических параметров позволил выбрать основные датчики – датчики тока, вибродатчики (акселерометры), датчики температуры, фотодатчики. В качестве электрических двигателей были исследованы двигатели постоянного тока (ДПТ) и асинхронные трехфазные двигатели (АД). Данные двигатели должны иметь датчики температуры и вибрации. Датчики вибрации устанавливаются на корпусе, как можно ближе к источнику вибрации (подшипникам). Один из датчиков температуры устанавливается на корпус, как можно ближе к обмоткам статора. Второй датчик определяет температуру окружающей среды. Также в электрических двигателях обоих типов устанавливаются датчики тока. Но в ДПТ – датчик постоянного тока, а в АД – 3 датчика переменного тока на каждую фазу. В ДПТ будет устанавливаться фотоэлемент с целью определения интенсивности искрения в коллекторно-щеточном узле.
Сигналы датчиков передаются в микропроцессорное устройство, где в цифровом виде происходит их запись во flesh память, предварительная обработка, анализ и принятие решения о техническом состояния двигателя. Записанные файлы передаются на персональный компьютер по USBинтерфейсу для более подробного анализа и сохранения результатов в базе данных.
Диагностирование приводов и мониторинг их состояния позволяют повысить надѐжность оборудования, уменьшить убытки, продлить срок службы машины.
Разрабатываемый программно-аппаратный комплекс позволит создать конкурентоспособный прибор для диагностирования АД и ДПТ. В перспективе количество типов диагностируемых электрических двигателей может увеличиться.
Список литературы
1.Nikitin, Y. Diagnostics of mechatronic systems on the basis of neural networks. – State-of-the-Art in Mechatronics, Vol. 2. – Alphen aan den Rijn: Simulation Research Press, 2010. P. 167–188.
2.Nikitin, Y., Abramov, I. Mechatronic modules diagnosis by use of fuzzy sets. – Proceedings of 14-th International Conference on Mechatronics. – 1-3 June, 2011. – Trencinske Teplice, Slovakia. – P. 109–111.
3.Nikitin, Y.R., Abramov, I.V. CNC machines diagnostics. – Proceedings 13-th International Simposium on Mechatronics. – 2-4 June, 2010. – Trencinske Teplice, Slovakia. P. 89–91.
4.Nikitin, Y.R., Abramov, I.V. Models of information processes of mechatronic systems diagnosis // University Review. – 2011. – V. 5. – № 1. – P. 12–16.
5.Никитин, Ю.Р., Абрамов, И.В. Информационные процессы в устройствах диагностирования мехатронных систем // Интеллектуальные системы в производстве. – 2011. – № 1 (17). – С.206–215.
6.Никитин, Ю.Р. Диагностика станков с ЧПУ // Интеллектуальные системы в производстве. Научно-практический журнал. – 2008. – № 12 (2). – С.89-90.
408
7.Никитин, Ю.Р. Диагностирование мехатронных систем: учеб. пособие / Ю. Р. Никитин, И. В. Абрамов. – Ижевск: Изд-во ИжГТУ, 2011. – 116 с.
8.Никитин, Ю.Р., Абрамов, И.В. О построении системы диагностирования станков c ЧПУ // Мехатроника, автоматизация, управление. – 2011. – № 4. – С. 32–35.
Tináková Daniela (Тинакова Даниела), студент Štollmann Vladimír, doc. Ing. CSc. PhD, доцент
Mária Laciková, младший преподаватель, магистр Технический университет в г. Зволен, Словакия
Анализ влияния техники на культуру общества
Развитие техники и механизации в настоящее время неумолимо идѐт вперѐд. Люди часто даже не осознают, как всѐ больше на них влияет современная техника. Компьютеры, сотовые телефоны, кухонные комбайны, легковые автомобили – эти достижения последнего столетия знает каждый. Лесное хозяйство тоже не избежало развития механизмов. Вопреки тому, что современная техника значительно влияет на жизнь людей и их культуру, она не воспитает людей в отношении к технике, как это было в древности, когда работа выполнялась с помощью несравнимо более простых инструментов и оборудования. Но зато сама работа была трудоѐмкая и требовала сплочѐнности большого количества работников.
Одной из таких профессий, которые в Словакии очень сильно влияли на культуру и жизнь обитателей, и которые нашли отражение во множестве обычаев, песен, легенд, суеверий и произведений исскуства, была профессия сплавщика (лесогона). Начало сплава бревен было стимулировано множеством природных и экономических факторов. К ним принадлежали, главным образом, сами леса, состав их древесных пород, местоположение в местности и очень значительная общедоступность леса, водостоки, географическая характеристика и человек, управляющий процессом сплава. На основе потребности в древесине, как необходимого и незаменимого сырья, пришла в движение экономика и рынок труда. Односторонний водоток начал использоваться в глубокой древности как самый простой и дешѐвый способ перевозки древесины на большие расстояния. В высоких горных областях достаточно было одного водотока, обладающего большой энергией, когда с помощью водяных лесоспусков и лотков спускали брѐвна из недоступных мест до низших местоположений. Но на больших реках транспортированным бревнам должна была помочь человеческая сила. Это означало большой расцвет профессии сплавщика. Возникли целые семьи сплавщиков, в которых каждый мужчина занимался этим ремеслом и, таким образом, оно переходило по наследству из рода в род.
Причиной того, что работа и ремесла в древности влияли в значительной степени на людей, был недостаток механизмов и техники.
409
Транспортировка на места производства или сама рабочая деятельность была более сложная и требовала больше времени. Ремесло сплавщика являлось исключительно рискованой профессией. Воды бурных рек неоднократно принимали человеческие жертвы. Данный факт поощрил людей к солидарности, доверию и взаимопониманию, а также к покорности природе. Возникали обычаи, традиции, суеверия и легенды, которые были составной частью жизни семьей сплавщиков. Сплавщики и члены их семьи молились и надеялись, что их сплавщик вернѐтся домой живой и здоровый. Легендами и суевериями объяснялись разные необъяснимые явления или ситуации, обычаи и традиции сопровождали сплавщиков к реке.
Данные обычаи сопровождали сплавщика со дня его рождения. Уже в колыбели решалось, какая будет его будущая профессия. В некоторых регионах новорождѐнному детѐнышу давали в колыбель игрушки – плот, перо или мотыгу. Какую игрушку он взял первую, такая была его будущая профессия. Мальчик, как можно раньше, учился работе на рабочем месте отца, наблюдал за водой, берегами, за их поведением, за опасными водоворотами и везде узнавал будущую опасность. Когда исполнялось 14 лет, они помогали сплавщику, как вспомогательный гребец, и этот акт сопровождало «крещение» сплавщика. Перед первым спуском сопровождали мальчика мать, крѐстная мать и отец в соответствии с традициями. Они мазали руки мальчика и рукоятку весла медвежьим жиром, слѐгка ударяли березовой хворостиной и давали ему съесть кусок традиционного пирога. Остаток блюда бросали в воду, как жертву водяным духам.
Значительным событием каждую весну являлся первый водоспуск года. На берегах рек, у приготовленных плотах, совершались богослужения, освящались блюда, которые потом сплавщики съедали со своими семьями и остатки бросили в воду для водяных духов. Данная церемония не была везде одинаковая, в некоторых регионах ещѐ пели песни или бросали в воду березовые венки.
Сплавщик был всегда образом сильного человека со своей неопределѐнной судьбой. Но вопреки страху, они остались верны работе. Чтобы обеспечить достойную жизнь своей семье, они отправлялись снова и снова на опасные волны словацких рек. Поэтому они пользовались уважением, и когда сплавщик умирал, устраивались специальные похороны. Например, тело усопшего не мыли водой из колодца, но водой из реки, где он плавал. В гроб ему положили курительную трубку, огниво и табак. Его друзья – сплавщики потом целую ночь разговаривали о добрых поступках усопшего и вспоминали общие переживания. Наконец, своего друга сопровождали в иной мир под знаменем святого Климента, патрона сплавщиков.
Ремесло сплавщика даже в своей самой развитой степени не знало организованности в форме цеха. Они его считали профессией «людей», не ремеслом. Сплавщики из региона Липтов основали добровольный фонд
410
«Братство сплавщиков Липтова», в который они перечисляли добровольные вносы. Эти деньги служили возможным взаимным пособием среди членов в трудные моменты их жизни.
Работа сплавщиков была не лѐгкая [1–7]. Самому «полѐту» предшествовала тщательная подготовка связки брѐвен. Плотам было запрещено плыть ночью. Сплавщики вечером находили места для отдыха и ночевки. Рядом с работой, полной неожиданных ловушек, они услаждали свою жизнь придумыванием и рассказыванием легенд. Хотя у них сказочный оттенок, каждая из них заключает в себе какой-нибудь реальный элемент. Или это имя персонажа, название села, горы, горного массива или реки. Посредством таких легенд, они искали ответы не на один вопрос. С развитием ремесла сплавщика, всѐ чаще появлялись любопытные люди, которые хотели знать причины разных явлений, связанных со словацкими реками. Устные истории передавались из рода в род, пока их словацкий автор Мирослав Антон Гуска (Miroslav Anton Huska) не собрал больше сотни и в 1966 году не опубликовал под названием «Белый плот на Вагу» (Biela plť na Váhu) [3]. Сборник содержит множество рассказов о фантастических персонажах водного мира, феях, водных мужчинах, драконах, разбойниках и чернокнижниках.
Покрытый тайной мир сплавщиков и их семей, был инспирацией для многих художников. Мартин Бенка (Martin Benka) (рис. 1), известный национальный художник, посвятил теме сплавщиков несколько произведений, потому что это было его любимой темой. Следующими известными художниками, которые интересовались персонажами сплавщиков, были Милош Базовски (Miloš Bazovský), Имрих Вайнер-Краль (Imrich Weiner-Kráľ) и Роберт Дубравец (Róbert Dúbravec).
Ремесло сплавщика (рис.2) обогащало культурную жизнь населения богатым набором народных песен. Из текстов песен можно узнать, какое влияние имела данная профессия на простых людей. Песни, чаще всего, полны боли, страха и печали.
О том, что профессия сплавщика долгие столетия влияла на культуру Словакии, и современный мир не забыл о них, как о части нашей истории, свидетельствует и марионеточный телесериал «Сплавщик Палько и водяной Венок» (Pltník Paľko a vodník Venček), который возник в 1983
году. В настоящее время люди забыли об этих 25 минутных сказках, но из рассказов пожилых людей можно сделать вывод, что у них самые лучшие воспоминания из данного телесериала и в оценке по Интернету сказки получили 71%. Телесериал состоит из семи частей, в которых молодой сплавщик плывѐт по реке Ваг (Váh) через территорию Словакии, посещает разные места, которые действительно существуют, испытывает различные переживания и преодолевает ловушки. В данном телесериале совершенно верно изображена работа сплавщиков, описаны народные обычаи, ход работы и рабочие инструменты.
411
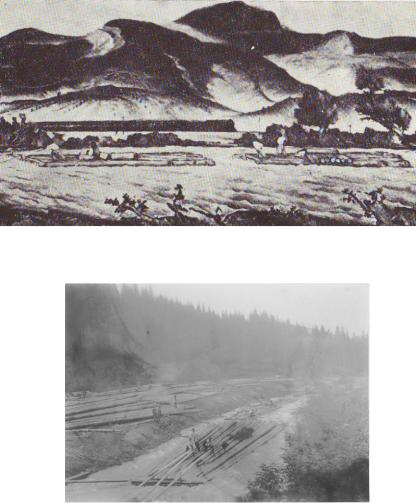
Рис. 1. Мартин Бенка (Martin Benka) – Направления (Smery) (1922 г.)
Рис. 2. Ремесло сплавщика
Вопреки тому, что история сплавщиков очень сильно влияла в позитивном смысле на культуру жителей Словакии, имеется и негативный момент, который надо упомянуть. В 18 веке среди сплавщиков распространился алкоголизм. Данный феномен заслуживает, наверное, более глубокого анализа, для которого в данной статье нет места. Мы только скажем, что наше исследование в данном направлении указывает на факт, что это был метод получения от сплавщиков заработанных ими денег.
Выше была описана жизнь простых людей, сплавщиков, которые отличались смелостью и силой. Среди людей они заслужили большого при-
412
знания, о чѐм свидетельствуют и сборники народных песен с тематикой сплавщиков. В своей среде они являлись братьями и помогали друг другу и своим семьям. В настоящее время ситуация изменилась. Современная техника нас не укрепляет, а балует. Благодаря ей не развиваются наши способности, и наоборот, мы дегенерируем, становимся более чувствительными и тщедушными. И благодаря современной технике и материальным благам, наше общество всѐ больше и больше индивидуализируется, всѐ больше мы замыкаемся в своѐм собственном виртуальном мире. Мы теряем контакт с природой, начинаем испытывать нехватку здоровых продуктов питания, чистого воздуха и воды. До тех пор пока будет так и техника будет служить бизнесу, а не людям и природе, никто не будет писать песни и творить произведения исскуства о компьютерах, сотовых телефонах, харвестерах или роботах.
Профессия сплавщика в Словакии исчезла, но остались прекрасные воспоминания и ценности, как в культурной сокровищнице, так и в сознании народа.
Список литературы
1. Huska, M. A. Slovenskí pltníci, život, práca a kultúra 2 slovenských pltníkov.
Martin: Osveta, 1972. 296 s.
3.Huska, M. A. Biela plť na Váhu. Bratislava: Mladé letá, 1981. 128 s.
4.Tináková, D., Štollmann, V. Splavovanie a jeho kultúrno spoločenský význam. Praha: Národní zemědelské muzeum Praha, 2012. 273 s.
5.Сайт Lainczová, H. Historia Pltnictva. URL:http://www.pltnictvo.eu/historia/
(дата обращения 01.01.2013).
6.Сайт Prvá Pltnícka a Turistická Spoločnosť na Dunajci, Z histórie pltníctva na
Dunajci. URL:http://www.1-pltnicka.sk/historia.html (дата обращения 01.01.2013).
7.Сайт Česko – Slovenská filmová databáze, Pltník Paľko a vodník Venček.
URL:http://www.csfd.cz/film/298634-pltnik-palko-a-vodnik-vencek/ (дата обращения 01.01.2013).
Е. М. Тютин, магистрант Ю. Л. Караваев, старший преподаватель
С. А. Трефилов, кандидат технических наук, доцент Ижевский государственный технический университет имени М. Т. Калашникова
Разработка беспроводного устройства измерения углового движения и ускорений
В данной статье описывается разработка устройства измерения угловой скорости и линейных ускорений с применением беспроводных и микромеханических электронных технологий. Приведена функциональная схема устройства и описания составляющих его деталей: управляющих
413
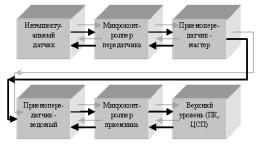
микроконтроллеров, МЭМС датчика гироскопа-акселерометра и приемопередающих модулей. Описаны алгоритм функционирования и программное обеспечение для управляющих микроконтроллеров.
Для платформы, движения которой будет измерять наш модуль, необходимы экономичный микроконтроллер, минимальные размеры измеряющего модуля и наличие беспроводного интерфейса связи измерителя, что подразумевается мобильностью. Отсюда следует необходимость применения микроэлектронных измеряющих и передающих модулей, которые дают нам выигрыш в габаритах, энергопотреблению и работоспособности изделия.
Рис. 1. Структурно-функциональная схема гироскопа-акселерометра.
Гироскоп-акселерометр состоит из современных микроэлектронных модулей и имеет простую структурно-функциональную схему, представленную на рис. 1. Данные от интеллектуального датчика преобразовываются внутри микроконтроллера передатчика из цифрового кода в измеряемое значение. Далее они пересылаются в ведущий радиопередатчик, который отправляет данные в сопряженный с ним ведомый радиоприемник по беспроводному радиоканалу с определенным периодом времени.
В качестве микроконтроллера для приемопередатчика-мастера выбран микроконтроллер STM32F103СB, а в качестве микроконтроллера для приемопередатчика-ведомого выбран STM32VLDISCOVERY – отладочный набор на базе микроконтроллера STM32F100RBT6B [3].
Вкачестве интеллектуального сенсора выбран MPU-6000 - устройство, впервые в мире объединяющее на одном кристалле гироскоп и акселерометр, работающие в трех осях, что упрощает проектирование и избавляет от необходимости калибровать отдельные датчики. Дополняет их цифровой процессор Digital Motion Processor (DMP), обрабатывающий сигналы, поступающие от датчиков [1].
Вкачестве передатчика выбран RFM70 – компактный модуль предназначенный для работы в безлицензионном ISM-диапазоне частот 2,4 ГГц. Мощный передатчик и скорость обмена до 2 МБод, делают его удобным
414
для применения в приложениях, требующих малой потребляемой мощно-
сти [2].
Вначале алгоритма управления производится настройка микроконтроллера для обеспечения работы интерфейсов связи с гироскопом и приемопередатчиком – инициализация портов ввода-вывода и запись регистров контроля модулей интерфейсов. Далее производится запись данных в гироскоп и приемопередатчик настройки для обеспечения их требуемых режимов работы.
После завершения процедур инициализации и настройки производится периодическое считывание данных с сенсора. После получения данных их нужно преобразовать из кода в значимое значение, учитывая диапазон измерения и применяя соответствующий делитель преобразования. Эти данные упаковываются в пакет данных для передачи его по беспроводному интерфейсу в сопряженный приемник, который производит постоянное сканирование эфира и производит считывание пакета по завершении передачи.
Принятые данные приемник отдает своему микроконтроллеру и их можно передать на устройство верхнего уровня (ПК, ПЛК, ЦСП) или применить в прикладном приложении микроконтроллера.
Программа передающего модуля с гироскопом разработана в среде CoIDE и содержит данные и процедуры для работы гироскопа и передатчика в соответствии с разработанным алгоритмом. Она использует ресурсный файл, описывающий функции работы с гироскопом. Работа передатчика инициализируется в тексте основной программы. В начале программы определяется режим работы схемы ‒ ведущий и определяются выводы сигнальных диодов. В главном цикле происходит стартовая инициализация портов и регистров микроконтроллера для работы с гироскопом и передатчиком, а после происходит запись настроек в сами устройства.
Вбесконечном цикле производится считывание данных гироскопа и преобразование их в значения скорости поворота (градус в секунду), линейного ускорения (mG – в долях силы тяжести) и температуры (град. Цельсия). Данные упаковываются в пакет и посылаются по беспроводному интерфейсу. Период посылки настраивается пользователем для достижения оптимального баланса точности и энергопотребления. Ресурсный файл для работы гироскопа описывает процедуру настройки выводов и параметров интерфейса связи I2C, скорости работы устройства и пределов измерения гироскопа и акселерометра. Здесь прописываются переменные настройки внутренней частоты гироскопа и делителя тактирования датчиков. Настройка пределов измерения имеет по 4 диапазона для гироскопа и акселерометра, сопряженных со своим делителем, применяемым для преобразования цифрового кода датчиков в измеряемые значения.
Программа принимающего модуля имеет сходную структуру с программой передающего модуля. В главном цикле происходит проверка
415
поступления пакета данных, который считывается при сигнале приема данных. Его контрольная сумма сравнивается с нулем для предотвращения подачи пустых данных при ошибках радиосвязи и распаковывается в отдельные переменные для наглядности отображения данных: скорости поворота и ускорения для каждой оси и температура.
а |
б |
Рис. 2. Измеритель и передатчик в сборе с источниками питания (а), приемник и его управляющая плата STMVLDiscovery (б)
Измеряющее беспроводное устройство было собрано на двух платах. Слева на рис. 2а представлена печатная плата с элементами измерителя и передатчика и подключенным внешним источником питания. Сигнальный диод мигает при отправке каждого пакета информации. Данная часть устройства мобильна и может устанавливаться на подвижные исследуемые платформы и получать питание от этой платформы, передавая данные о положении в пространстве и воздействующих силах.
Справа на рис. 2б представлена плата с ведомым приемником данных от измерителя. Сигнальные диоды мигают при принятии и распознании каждого пакета информации. С платы можно получать прямое отображение принятых данных, организовав связь платы через интерфейс программатора ST-LINK SWD с программой ПК STM-Studio. Данная программа показывает текущие значения переменных в выполняемой программе внутри микроконтроллера, с которым она связана и удобна для наших экспериментальных исследований.
Отображение возможно в виде таблицы, гистограммы или графика (рис. 3а, 3б), также программа записывает журнал принятых данных (рис. 4) – время отсчета, переменная в программе и еѐ значения.
d: |
time(ms) |
accelx accely |
accelz gyrox |
gyroy |
gyroz |
temperature |
||
d: |
0.00 |
9 |
-5 |
-93 |
6 |
3 |
-12 |
25 |
d: |
59.81 |
9 |
-5 |
-93 |
6 |
3 |
-12 |
25 |
d: |
1767.78 |
1 |
-1 |
-97 |
-1 |
3 |
5 |
25 |
Рис. 4. Фрагмент журнала записи данных устройства программой STM-Studio
416
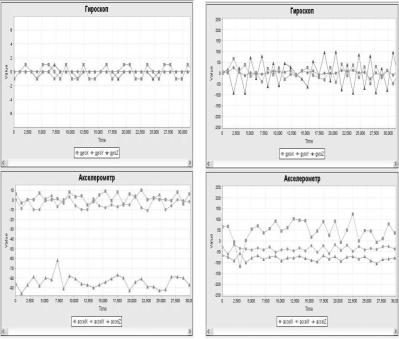
а б Рис. 3. Индикация измеряемых величин в STM-Studio: а) устройство в состоянии покоя, регистрируется сила тяжести б) устройство качается на маятнике отно-
сительно оси Z с периодом около 2 секунд
Несколько сеансов работы показали, что используемый сенсор имеет минимальную погрешность при измерении угловой скорости, которая компенсируется введением аддитивной поправки при процедуре преобразования данных. Акселерометр имеет значительные шумы, которые составляют примерно 0,1‒0,2 G. Стабильность связи сохраняется на расстоянии примерно до 30 метров в прямой видимости и до 10 метров через бетонную стену.
Достигнутые результаты, такие как стабильность работы составляющих частей, их совместимость и качество связи беспроводного интерфейса позволяют считать это устройство хорошей базой для построения модуля углового ориентирования мобильных платформ (робот-сфера, роботтележка, летательные аппараты).
Список использованной литературы
1.MPU-6000 [Электронный ресурс] - product specification./InvenSence Inc. -
Электрон. текстовые дан.- USA,CA,Sunnyvale: 2011.-Режим доступа: http://www.invensense.com, свободный
2.RFM70 [Электронный ресурс] - datasheet/ Hope Microelectronics Co., Ltd -
417
Электрон. текстовые дан. - China, Guangdong: 2006.- Режим доступа: http://www.hoperf.com, свободный
3. STM32F100xx advanced ARM-based 32-bit MCUs [Электронный ресурс]- reference manual./ STMicroelectronics. - Электрон. текстовые дан.- Belgium, Geneve: 2010. - Режим доступа: http://www.st.com, свободный.
Е. Н. Филиппов, студент
В. В. Марков, кандидат технических наук, доцент Карачевский филиал Госуниверситета-УНПК
Устройство для автоматического управления скоростью вращения вентилятора источника электропитания персонального компьютера
Современный источник электропитания персонального компьютера представляет собой достаточно сложное устройство, в состав которого входят электронные и механические элементы. С точки зрения надѐжности все элементы источника электропитания соединены последовательно, то есть, отказ любого из них может привести к отказу всего изделия. Поэтому для повышения надѐжности источника электропитания необходимо выявлять наименее надѐжные элементы его структуры и принимать меры по повышению их долговечности.
Одним из наименее надѐжных элементов источника электропитания персонального компьютера является вентилятор или «кулер». Его низкая надѐжность связана с тем, что в состав вентилятора входят не только электронные компоненты, но и электромеханические изделия, в частности, электродвигатель постоянного тока [1]. Механические части электродвигателя работают в условиях значительных динамических нагрузок, могут испытывать масляное голодание (недостаток смазочного материала), вибрации, перегрузки и другие деструктивные факторы, приводящие к потере им работоспособности. Ресурс вентилятора можно значительно увеличить, если уменьшить наработку электродвигателя в течение срока службы источника электропитания системного блока персонального компьютера. Рассмотрим один из подходов к решению данной задачи.
Встроенный в источник электропитания персонального компьютера вентилятор выполняется на основе двухфазного вентильного двигателя постоянного тока с внешним ротором. В таком двигателе на роторе расположены постоянные магниты, создающие магнитный поток возбуждения, а обмотка якоря расположена на статоре. Питание обмотки статора осуществляется таким образом, что между еѐ намагничивающей силой и потоком возбуждения сохраняется смещение в 90 градусов. При вращающемся роторе такое положение может сохраниться в результате переключения обмоток статора [2].
418
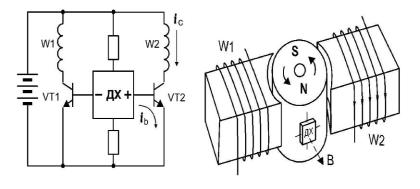
Положение ротора электродвигателя определяется с помощью датчика положения, в качестве которого используется преобразователь Холла [3]. Датчик положения управляет работой электронных ключей. В вентильных двигателях применяются преобразователи Холла n-типа на основе InSb и GaAs. На рис. 1 схематически показан вентильный электродвигатель постоянного тока с преобразователем Холла и схема включения электродвигателя с преобразователем в цепь питания (обмотки электродвигателя изображены в виде катушек индуктивности W1 и W2). Преобразователь Холла ДХ служит для управления активностью обмоток электродвигателя.
Рис. 1. Принцип действия вентильного двигателя постоянного тока, использующего преобразователь Холла
В процессе работы вентилятора возможны следующие состояния ротора электродвигателя [2]:
1)преобразователь Холла определяет северный полюс N постоянного магнита ротора, ЭДС Холла закрывает транзистор VT1, открывает транзистор VT2 и подключает обмотку W2 таким образом, что в сердечнике, охваченном обмоткой W2, образуется южный полюс электромагнитного поля, вызывающий вращение ротора против часовой стрелки (так как разноименные полюса притягиваются друг к другу);
2)ротор поворачивается на 90 градусов и преобразователь Холла выходит из-под действия магнитного поля. Это приводит к запиранию обоих транзисторов (VT1 и VT2) и обесточиванию обмоток W1 и W2. Однако ротор электродвигателя продолжает по инерции вращаться против часовой стрелки;
3)преобразователь Холла определяет южный полюс S постоянного магнита ротора, ЭДС Холла открывает транзистор VT1, закрывает транзистор VT2 и подключает обмотку W1 таким образом, что в сердечнике, охваченном обмоткой W1, образуется южный полюс электромагнитного поля, вызывающий продолжение вращения ротора против часовой стрелки.
419
С помощью преобразователя Холла в обмотках электродвигателя образуется электромагнитное поле, которое периодически изменяет свою полярность, что приводит к вращению постоянного магнита (ротора) в неизменном направлении – против часовой стрелки.
Таким образом, вентилятор источника электропитания системного блока персонального компьютера состоит из вентильного электродвигателя постоянного тока и электронного устройства управления, в состав которого входит преобразователь Холла, два транзистора, работающих в режиме электронных ключей, и нескольких пассивных элементов, понижающих напряжение питания (резисторы) и сглаживающих его перепады (конденсаторы). Обмотка статора электродвигателя состоит из 4-х катушек; обмотки первой и второй фаз наматываются совместно. Магнитные полярности обмоток у каждого из полюсов двигателя противоположны друг другу. Такой тип обмотки называют бифилярной обмоткой. Это позволяет питать обе обмотки напряжением одной полярности.
Для повышения долговечности вентилятора необходимо уменьшить наработку (продолжительность вращения) электродвигателя и защитить преобразователь Холла от случайного превышения напряжения питания. С этой целью в электронное устройство управления добавлены два термистора TR1, TR2 и диодный тиристор (динистор) VS1, как показано на рис. 2.
Термисторы TR1 и TR2 предназначены для автоматического управления скоростью вращения ротора электродвигателя вентилятора. В «холодном» состоянии, когда температура внутри источника электропитания низкая, сопротивление термисторов достигает нескольких кОм, поэтому сила тока в цепи питания электродвигателя недостаточна для его запуска. При работе источника электропитания выделяется теплота, термисторы разогреваются, и их сопротивление уменьшается до нескольких десятков Ом. Сила тока в цепи питания электродвигателя увеличивается до уровня, достаточного для его запуска. После запуска электродвигателя вентилятор понижает температуру внутри источника электропитания до заданного значения, и сопротивление термисторов снова возрастает, ограничивая ток питания – электродвигатель начинает вращаться с меньшей скоростью и, наконец, останавливается полностью. Температура опять начинает повышаться, электродвигатель снова запускается и так далее.
420
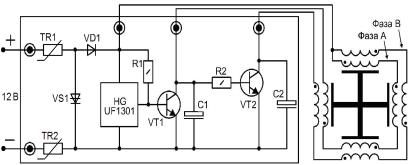
Рис. 2. Принципиальная электрическая схема устройства управления скоростью вращения электродвигателя вентилятора и защиты преобразователя Холла от случайного превышения значения напряжения питания
При включении термисторов TR1 и TR2 в состав устройства управления скорость вращения электродвигателя вентилятора зависит от температуры внутри источника электропитания персонального компьютера и, с помощью предложенного устройства, может автоматически изменяться от нуля (полная остановка) до своего наибольшего значения. Предложенное устройство выгодно отличается от известных релейных систем регулирования вращения вентиляторов плавным изменением скорости электродвигателя и большей чувствительностью к изменению температуры окружающей среды.
Тиристор VS1 служит для защиты преобразователя Холла от случайного превышения значения напряжения питания. Для этого подбирается тиристор с критическим напряжением Uкр = 12,2…12,5 В. Если напряжение питания находится в допустимых пределах (не превышает критического значения), сопротивление тиристора составляет несколько десятков кОм и не оказывает влияния на работу цепи управления. Если же напряжение питания оказывается больше критического значения, тиристор включается, и его сопротивление резко падает до единиц Ом. Цепь управления оказывается отключѐнной тиристором от цепи питания, вентилятор останавливается, а в цепи питания срабатывают предохранители «автоматы» (в электрической принципиальной схеме на рисунке 2 не показаны). После отключения цепи управления от напряжения питания тиристор возвращается в исходное состояние и снова приобретает высокое сопротивление. То есть, тиристор VS1 (динистор) позволяет защитить электронные компоненты цепи управления от повышенного напряжения.
Предложенное изменение состава устройства управления электродвигателем вентилятора может быть выполнено как на самой печатной плате цепи управления, так и в виде дополнительной печатной платы. Оно отличается простотой конструктивного исполнения, низкой стоимостью и при этом обеспечивает достижение запланированного результата – перио-
421
дического отключения двигателя вентилятора и защиту его цепи управления.
При некотором усложнении предложенного устройства возможна защита электродвигателя вентилятора от повышенного износа в условиях нехватки смазочного материала, разрушения подшипников электродвигателя, попадания в них пыли и абразивных частиц. Для этого в состав устройства следует добавить пьезоэлектрический преобразователь [4]. При повышенном износе узлов трения электродвигателя возникает шум, который преобразуется пьезоэлектрическим преобразователем в электрический заряд. Преобразуя выходной электрический заряд пьезоэлектрического преобразователя в сигнальное напряжение, можно определять момент возникновения опасного состояния в вентиляторе и останавливать его до появления необратимых разрушений.
Список литературы
1.Кучеров, Д.П. Источники питания мониторов [Текст] / Д.П. Кучеров. – СПб.:
Питер, 2009. – 240 с.
2.Головков, А.В. Блоки питания для системных модулей типа IBM PC XT/AT [Текст] / А.В. Головков, Б.В. Любицкий. – М.: «ЛАД и Н», 1995. – 93 с.
3.Левшина, Е.С. Электрические измерения физических величин: (Измерительные преобразователи) [Текст]: Учеб. пособие для вузов / Е.С. Левшина, П.В. Новицкий. – Л.: Госэнергоатомиздат, 1983. – 320 с.
4.Фрайден, Дж. Современные датчики [Текст]: Справочник / Дж. Фрайден. – Пер. с англ. Ю.А. Заболотной; под ред. Е.Л. Свинцова. – М.: Техносфера, 2005. – 592 с.
А. В. Шадрин, магистрант Т. В. Брагина, магистрант
П. А. Ушаков, доктор технических наук, профессор Ижевский государственный технический университет имени М. Т. Калашникова
Моделирование динамических систем дробного порядка стандартными средствами среды моделирования CADENCE
Невозможно себе представить современную науку без математического моделирования, когда исследуемый физический объект заменяется математической моделью. Работа с моделью, а не с самим объектом, позволяет с меньшими затратами исследовать динамическую систему в различных ситуациях – с различными входными воздействиями и с различными параметрами системы.
Одним из современных направлений в науке является так называемая дробная динамика – когда поведение некоторой динамической системы более точно описывается с помощью теории дифференциальных уравне-
422

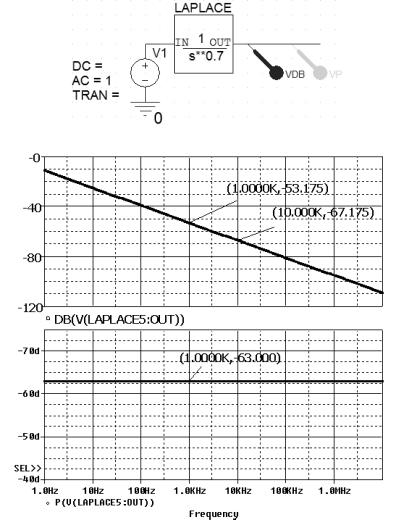
0,7 с помощью блока LAPLACE. На рис. 3 изображены АЧХ и ФЧХ цепи.
Рис. 1. Схема моделирования интегратора порядка 0,7
а
б
Рис. 2. Частотные характеристики цепи: а) АЧХ; б) ФЧХ
По частотным характеристикам видно, что АЧХ представляет собой наклонную линию с постоянным наклоном 14 дБ/дек.; ФЧХ также постоянна на всем промежутке частот, фаза равна 63°. Полученные значения полностью удовлетворяют выражениям (2).
Покажем, как моделировать работу системы дробного порядка при
424

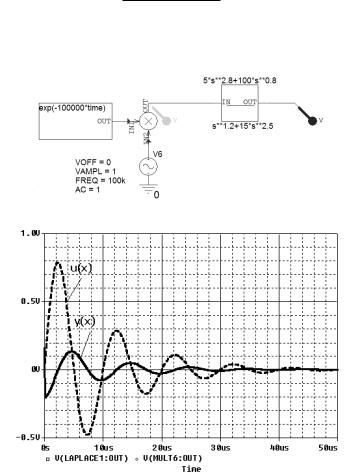
5 s |
2,8 |
100 s |
0,8 |
||
|
|
||||
s |
1,2 |
15 s |
2,5 |
||
|
|
|
|
||
На рис. 5 изображена схема для моделирования динамической системы, на рис. 6 – входное воздействие u(t) и полученная функция состояния y(t).
Рис. 4. Схема для моделирования динамической системы.
Рис. 5. Временные характеристики динамической системы: u(x) – функция возбуждения (входное воздействие);
y(x) – функция состояния (реакция системы).
Представленный в статье инструмент моделирования может использоваться для моделирования динамических систем дробного порядка, описанных дифференциальными уравнениями или передаточными функциями дробного порядка.
426
Список литературы
1. Ушаков, П.А. Проектирование функциональных устройств микроэлектроники на основе резистивно-емкостных сред [Текст]: учеб. пособие: в 2 ч. / П.А. Ушаков. – Ижевск: Изд-во ИжГТУ, 2012. 160 с.
С. А. Шалашов, магистрант Л. Д. Загребин, доктор физико-математических наук, профессор
Ижевский государственный технический университет имени М. Т. Калашникова
Эллипсометрическое измерение температуропроводности наноструктурированных материалов с использованием импульсного лазерного излучения
Работа посвящена измерению температуропроводности наноструктурированных материалов с помощью лазерного излучения ГОР-100Н.
Имеется множество методов исследования температуропроводности. Одним из методов является импульсный метод.
Для приготовления образцов используются порошки металлов с различным процентным содержанием. Механическое прессование исследуемых материалов осуществляется при одинаковых условиях, затем полирование исследуемой поверхности до требуемой чистоты поверхности. Промыть или продуть сжатым воздухом исследуемую поверхность.
Экспериментально временная зависимость оптических констант и ээлипсометрических параметров в полупроводниках и металлах при импульсном воздействии лазерного излучения изучалась в работах [1].
Измерения теплофизических свойств наноструктурированных материалов импульсным методом [2]. При воздействии импульсным лазерным лучом ГОР-100М на поверхность образца подается тепловое воздействие, фиксируется зависимость температуры от времени, вызванное этим импульсом.
На рис. 1 представлена принципиальная оптическая схема.
427
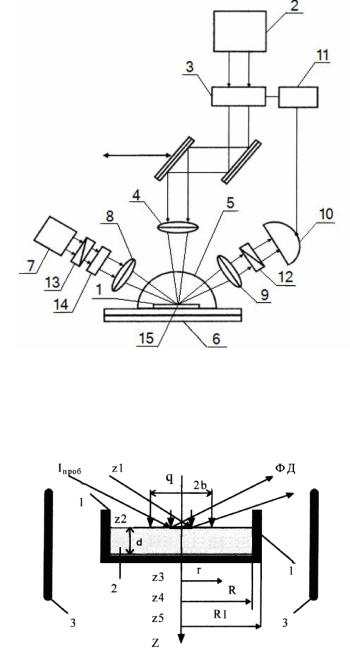
Рис. 1. Принципиальная оптическая схема [4]:
1 – держатель образца; 2 – греющий лазер; 3 – электрооптический модулятор; 4 – фокусирующий асферический объектив; 5 – вакуумная камера; 6 – предметный координатный стол эллипсометра; 7 – пробный He-Ge лазер; 8, 9 – фокусирующие объективы пробного излучения; 10 – фотоприемник с предварительным
усилителем; 11 – интерфейс и мини-ЭВМ; 12 – анализатор; 13 – поляризатор; 14 – компенсатор; 15 – образец
На рис. 2 представлена принципиальная схема измерительной ячейки.
Рис. 2. Принципиальная схема измерительной ячейки [4]: 1 – держатель образца; 2 – образец; 3 – внешний экран
428

А. В. Шелухо, магистрант Ю. Л. Караваев, старший преподаватель
С. А. Трефилов, кандидат технических наук, доцент Ижевский государственный технический университет имени М. Т. Калашникова
Разработка и исследование системы управления Omni-колесным роботом
Исследование нелинейных средств передвижения является актуальным в области колесной робототехники (транспортные роботы).
Основными недостатками четырехколесного шасси обычной конструкции заключается в том, что оно неспособно перемещаться в поперечном направлении и вращаться на месте.
Для решения этой проблемы используют Omni-колеса. Конструкция Omni-колеса имеет похожую по форме на звезду ступицу из высокопрочной стали. Ступица жестко установлена на оси и не может поворачиваться вправо-влево. На ступице стоит свободно вращающиеся ролики особой формы, внешние края которых образуют ровный круг. Каждый ролик находится на оси, оси роликов расположены под углом к оси колеса.
Рис. 1.Omni-колесо |
Рис. 2. Модель Omniколесного робота |
Каждое Omni-колесо оснащено собственным электрическим двигателем и блоком управления. Ролики на колесах одной стороны расположены симметрично, благодаря чему создаются силы, толкающие колесо вперед и вбок.
Скорость и направление вращения каждого из четырех колес по отдельности рассчитывает микроконтроллер – главный электронный блок управления машины, который получает сигналы с верхнего уровня управления (персональный компьютер) и осуществляет требуемое движение.
Благодаря такой конструкции машина может передвигаться любой стороной и в любом направлении [1].
Установка датчиков линейных ускорений (акселерометров) и датчика положения в пространстве (3-х осевого гироскопа), обеспечит заданную точность позиционирования транспортного робота и внесения корректировок в траекторию движения робота при наличии внешних возмущений.
430
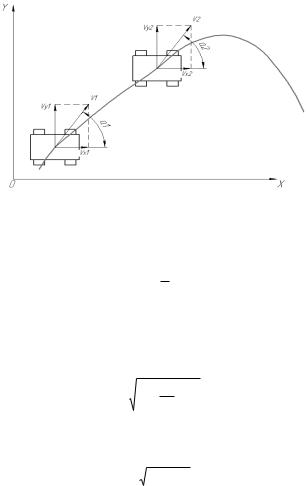
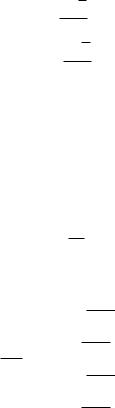





ляющая осуществлять движение Omni-колесного робота по заданной траектории. Главным недостатком данной математической модели является то, что она исключает проскальзывание колеса относительно поверхности, по которой перемещается робот. Для того чтобы применить модель к конкретному Omni-колесному роботу, достаточно знать геометрические параметры колес и самого робота, а также задать траекторию и время движения робота по ней.
Список литературы
1.Склад и Техника [Электронный ресурс]: информационный журн. / РИА «Р.О.С.С.БИЗНЕС. – Электрон. журн. – Москва: РИА «Росбизнес», 2003. - , – ре-
жим доступа к журн.: http://www.sitmag.ru/
2.Бройнль, Т. Встраиваемые робототехнические системы: проектирование и применение мобильных роботов со встроенными системами управления [Текст] /Т. Бройнль; под ред. В. Е. Павловского. – Ижевск: ИКИ, 2012. – 520 с.
3.Копылов, И.П. Электрические машины: Учебное пособие для вузов [Текст] / И.П. Копылов. – Москва: Энергия, 1980. – 496 с.
434
УДК 004(045) |
|
Раздел 3. ИНФОРМАЦИОННО- |
|
ТЕЛЕКОММУНИКАЦИОННЫЕ СИСТЕМЫ |
|
И ТЕХНОЛОГИИ |
|
Содержание |
|
Байтеряков А. В., Дедов А. И., Осинцев Д. С., Муравьева О. В., Муравьев В. |
|
В. Исследование структуры термообработанных образцов стали 45 |
|
акустическим эхо-методом...................................................................................... |
437 |
Быков Р. С., Нистюк А. И. Технология построения адаптивной |
|
маршрутизации........................................................................................................ |
441 |
Богатырев К. А., Климов И .З. Анализ состояния канала связи методом |
|
регуляризации ......................................................................................................... |
443 |
Богдан О. П., Муравьева О. В. Оценка влияния артефакта «псевдопоток» |
|
на погрешность измерения скорости кровотока при ультразвуковой |
|
допплерографии ...................................................................................................... |
448 |
Брагина Т. В., Ушаков П. А. Опыт моделирования мемристора ....................... |
451 |
Важенин И. А., Абилов А. В. Модификация системы веб-аналитики PIWIK |
|
и ее локализация в России ....................................................................................... |
456 |
Васильев Д. С., Чунаев А. В., Абилов А. В. Анализ проблем программной |
|
реализации передачи потоковых данных в одноранговых сетях со структурой |
|
многослойного дерева ............................................................................................. |
461 |
Гиззатуллин Д. Р., Заболотских Я. В., Ершова С. В., Русленникова Ю. В., |
|
Сулейманова А. Р., Муравьев В. В. Металлографический анализ термически |
|
обработанных сталей............................................................................................... |
466 |
Головкова А. А., Нистюк А. И. Анализ прохождения радиоволн через |
|
геологические породы ............................................................................................. |
469 |
Головкова А. А., Нистюк А. И. Аварийное оповещение на горнорудных |
|
предприятиях........................................................................................................... |
471 |
Головкова А. А., Нистюк А. И. Анализ комплекса аварийного оповещения |
|
для угольных шахт .................................................................................................. |
474 |
Зарипов Р. Ф., Стрижак В. А. Влияние регулярных перепадов сечения на |
|
контролепригодность прутка .................................................................................. |
477 |
Жидяев А. В., Мошонкин В. А. Оценка параметров нестационарного канала |
|
связи по вектору ошибок помехоустойчивого декодера......................................... |
481 |
Жулдыбина Г. Н., Злобин Д. В. Оптимизация усилительного тракта |
|
аппаратуры волноводного акустического контроля линейно-протяженных |
|
объектов .................................................................................................................. |
485 |
Караваев П. В., Богданов А. А. Широкополосный сигнал с манипуляцией |
|
частотных составляющих по фазе........................................................................... |
489 |
Казанцев И. А., Нистюк А. И. Перспективы квантовых компьютеров ............. |
493 |
Козлов А. С., Бояршинов М. А. Разработка портативного радиомодуля УВЧ |
|
диапазона................................................................................................................. |
495 |
Колотов Д. В., Марков М. М. Математическое исследование методов |
|
линеаризации усилителя мощности ........................................................................ |
499 |
Корякин А. В. Применение нейросетей для распознавания сигналов в |
|
периметровых акустических охранных системах ................................................... |
503 |
Кочурова Д. С., Айзикович А. А. О присоединенной системе линейных |
|
разностных уравнений............................................................................................. |
507 |
435
Злобин Д. В., Кошкин А. И., Малютин Д. В., Муравьев В. В. Аппаратная |
|
|
реализация метода автоциркуляции импульсов для измерения скорости |
|
|
ультразвуковых волн............................................................................................... |
509 |
|
Кружалова Ю. В., Нистюк А. И. Концепция звукового музыкального |
|
|
блокнота .................................................................................................................. |
|
514 |
Любезнов Я. А., Хворенков В. В. Разработка модернизированной |
|
|
конструкции прибора PKF12-32.............................................................................. |
517 |
|
Мельников В. П., |
Миловзоров Г. В. Структура градиентометрической ИИС |
|
для обнаружения скрытых ферромагнитных объектов на основе |
|
|
феррозондовых датчиков ........................................................................................ |
521 |
|
Менлыгалиев Н. В., Леонов К. Н. Генератор хаотических сигналов с |
|
|
инвариантными свойствами .................................................................................... |
524 |
|
Мерзляков Д. Н., Хворенков В. В. Разработка модернизированной |
|
|
конструкции прибора PDU-52................................................................................. |
528 |
|
Миловидова А. И., Нистюк А. И. Экспериментальная установка для |
|
|
измерений колебаний сенсорного экрана................................................................ |
532 |
|
Миловидова А. И., Нистюк А. И. Измерение деформации и колебаний |
|
|
элементов телекоммуникационных устройств........................................................ |
534 |
|
Миловзоров А. Г., Миронов А. Д., Миловзоров Г. В. Телеметрические |
|
|
навигационные системы с передачей данных по гидравлическому каналу |
|
|
связи ........................................................................................................................ |
|
537 |
Миловзоров А. Г., Наговицина И. В., Миловзоров Г. В. Постановка задачи |
|
|
оптимизации проводки скважин в заданном направлении в условиях |
|
|
неопределенности.................................................................................................... |
|
540 |
Морозова Е. С., Миловзоров Г. В. Первичные преобразователи |
|
|
инклинометрических систем ................................................................................... |
543 |
|
Мохов В. Н., Хворенков В. В. Разработка технологических схем |
|
|
функционирования |
и взаимодействия локальной системы оповещения |
|
«Воткинской ГЭС» по интеграции ее в региональную автоматизированную |
|
|
систему централизованного оповещения Удмуртской Республики»...................... |
548 |
|
Наговицына С. В., Шишаков К. В. Разработка полосковой СВЧ антенны........ |
551 |
|
Невоструев А. Н., Абилов А. В. Имитационное исследование протоколов |
|
|
маршрутизации в WI FI MESH сетях ...................................................................... |
555 |
|
Осипов В. А. Многомерный базис функций Виленкина ‒ Крестенсона ............ |
563 |
|
Петров М. А., Леонов К. Н. Исследование взаимодействия протоколов |
|
|
физического и канального уровней в сетях автоматизированных систем |
|
|
управления зданием ................................................................................................ |
|
565 |
Пудова М. Н., Зямбахтина А. Н., Пономарева О. В. Виртуальный прибор |
|
|
для анализа электроэнцефалограмм ........................................................................ |
570 |
|
Сиротина А. А., Ушаков П. А. Определение фрактальной размерности |
|
|
топологии резистивно-емкостных элементов с распределенными параметрами ... |
573 |
|
Стерхов В. Д., Зарипов Р. Ф., Муравьева О. В., Стрижак В. А. Контроль |
|
|
отклонений в геометрии сечения прутка электромагнитно-акустическим |
|
|
методом ................................................................................................................... |
|
577 |
Стерхов В. Д., Петров К. В., Муравьева О. В. Влияние местоположения |
|
|
индуктора проходного электромагнитно-акустического преобразователя на |
|
|
его акустическую помехозащищенность ................................................................ |
581 |
|
Чунаев А. В. Программная реализация алгоритма FEC прикладного уровня |
|
|
для передачи потоковых данных............................................................................. |
586 |
|
436
Якимов М. В., Андрюшаев К. А., Ломаев Г. В. Влияние магнитных бурь на |
|
процесс направленного бурения наклонных и горизонтальных скважин, |
|
возможность аппаратного выявления помехи от магнитных бурь ......................... |
590 |
А. В. Байтеряков, магистрант; А. И. Дедов, аспирант |
|
Д. С. Осинцев, магистрант; |
|
О. В. Муравьева, доктор технических наук, профессор |
|
В. В. Муравьев, доктор технических наук, профессор |
|
Ижевский государственный технический университет имени |
|
М. Т. Калашникова |
|
Исследование структуры термообработанных образцов |
|
стали 45 акустическим эхо-методом |
|
Применяемый в настоящее время металлографический метод определения размера зерен, являясь выборочным и разрушающим, неприменим для контроля готовых изделий. Поэтому контроль структуры материалов и изделий по фактическому состоянию является одним из актуальных направлений неразрушающего контроля
В настоящей статье демонстрируется возможность использования структурного шума в качестве информативного параметра для оценки структуры металлов, что является новым подходом в области структуроскопии.
Структурный шум связан с рассеянием ультразвука на структурных неоднородностях, зернах материала. Импульсы, образовавшиеся в результате рассеяния ультразвука на различных неоднородностях и приходящие к приемнику в один и тот же момент времени, складываются. В зависимости от случайного соотношения фаз отдельных импульсов они могут усилить или ослабить друг друга. В результате этого на индикаторе дефектоскопа структурный шум имеет вид отдельных близко расположенных пи-
ков [1].
Размер зерна ‒ один из важных показателей качества кристаллических материалов, непосредственно влияющих на эксплуатационные характеристики деталей машин и конструкций. Размер зерна определен ГОСТ 563982 [2], как средний диаметр зерна, и оценивается в номерах шкалы (баллах) ГОСТа. Например, балл 0 соответствует среднему диаметру зерна
D=352 мкм, а балл 14 ‒ D=2,7 мкм.
Большое влияние на коэффициент рассеяния ультразвука в металлах оказывает отношение средней величины зерна D и длины волны λ. Описанные ниже исследования проведены для области рэлеевского рассеяния, т. е. когда λ >> D.
Для исследования структурных шумов были подготовлены металлические образцы из круглого проката конструкционной стали 45 в виде дисков (диаметром d и высотой h) с различной термической обработкой, а
437
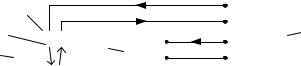
следовательно и с разными структурами. Основные характеристики образцов приведены в табл. 1.
Таблица 1. Характеристика объектов контроля
№ об- |
Размеры образца |
|
Температура |
Средний |
||
Вид обработки |
нагрева под |
балл |
||||
|
|
|||||
разца |
d, мм |
h, мм |
||||
|
закалку, °C |
зерна |
||||
|
|
|||||
|
|
|
|
|||
1 |
54,7 |
19,9 |
поставка (нормализация) |
850 |
5 |
|
2 |
54,7 |
19,9 |
закалка, вода |
780 |
8 |
|
3 |
54,7 |
19,9 |
закалка, масло |
850 |
7 |
|
4 |
54,7 |
19,9 |
закалка+улучшение |
850+600 |
6 |
|
5 |
48,3 |
18,7 |
поставка (нормализация) |
850 |
5 |
|
6 |
48,3 |
16 |
перегрев под отжиг |
1050 |
3 |
|
Образцы № 1 и № 5 вырезаны из разных участков круглого проката и исследованы в состоянии поставки для оценки структуры контролируемых образцов перед термической обработкой.
После подготовки шлифа по всей плоской поверхности и травления в 4-х процентном водном растворе HNO3 для выделения границ зерен, c помощью микроскопа Альтами МЕТ 1М оценена микроструктура шлифов образцов.
Для излучения и приема продольных волн в образцах использован прямой раздельно-совмещенный преобразователь П112-5,0-Ø8. Генерация ультразвукового импульса производилась ультразвуковым дефектоскопом ДУК-66. Схема контроля приведена на рис. 1.
|
|
|
|
|
Генератор |
|
|
1 |
|
|
Усилитель |
|
|
|
|
|
|
|
2 |
И П |
|
|
5 |
|
|
CH1 |
VideoSignal |
||
|
|
|
|||
|
|
|
4 |
||
3 |
|
|
|
|
|
|
|
|
Синхр. |
Синхр. |
|
|
|
|
|
Рис. 1. Схема контроля: 1 – преобразователь; 2 – контактная жидкость; 3 –образец; 4 – осциллограф; 5 – дефектоскоп
Для сохранения и дальнейшей обработки сигнала к дефектоскопу подключен цифровой осциллограф RIGOL DS1102C.
В качестве исследуемого информативного параметра рассматривали усредненный уровень амплитуды структурного шума и донного импульса.
При установке на объект контроля преобразователя, на дисплее осциллографа отображается осциллограмма, показанная на рис. 2 а). На рис. 2 б) приведена увеличенная развертка по времени.
Вследствие особой конструкции раздельно-совмещенного преобразователя, часть энергии с излучаемой пьезопластины проходит в виде рэлеевской волны на приемную пьезопластину по поверхности протектора преобразователя. Схема формирования такого «пролаза» показана на рис. 3. В результате этого на осциллограмме (рис. 2) виден скачок между зондирующим и первым донным импульсом. Поэтому зоной контроля явля-
438
ется участок между «пролазом» и донным импульсом.
а) б)
Рис. 2. Осциллограмма: а) серия импульсов; б) отрезок зондирующий импульс – донный импульс
|
6 |
|
1 |
1 |
|
2 |
2 |
|
3 |
7 |
|
3 |
||
4 |
||
8 |
||
|
||
5 |
|
Рис. 3. Схема формирования «пролаза»: 1 – демпфер, 2 – пьезоэлемент, 3 – призма, 4 – протектор, 5 – объект контроля, 6 – вывод,
7 – акустический экран, 8 – контактная жидкость
В качестве опорного сигнала для всех образцов зафиксирована амплитуда донного импульса.
При усилении сигнала дефектоскопа до значения 10 дБ, на осциллограмме появляются дополнительные пики. Перемещение преобразователя по поверхности образца приводит к изменению положения максимумов пиков во времени, при этом амплитуда донного импульса остается неизменной. Это объясняется одновременным приходом многократно рассеянных от зерен материала волн, которые интерферируют между собой и усиливаются. Пример двукратного рассеяния приведен на рис. 4. Волна от точки B рассеивается в точке C и приходит одновременно с волной рассеянной в точке D к преобразователю [1].
Рис. 4. Двукратное рассеяние волны на границе зерен материала
Для каждого из образцов проведены измерения в четырех точках: первое измерение в центре, остальные – ближе к боковой поверхности образца. Чтобы учесть случайную ошибку, в каждой позиции измерения произ-
439
ведены по три раза. При этом ручка аттенюатора дефектоскопа установлена на значении 10 дБ.
При помощи функций осциллографа получены файлы данных для каждого измерения.
С целью устранения «пролаза» на осциллограмме полезного сигнала дополнительно был получен файл данных с ненагруженного преобразователя. В программной среде MathCAD из файлов данных измерений всех образцов были вычтены значения файла данных с ненагруженного преобразователя. Рис. 5 демонстрирует вышеописанные действия.
Рис. 5. Демонстрация вычитания из графика полезного сигнала (а) постоянно присутствующего импульса («пролаза») (б). На рисунке в) результат вычитания
Далее для каждого образца результаты обработанных измерений усреднялись и строились графики, по которым можно оценить величину средней амплитуды сигнала, отраженного от зерен структуры материала. В табл. 2 представлены средние значения амплитуд структурного шума и донных импульсов исследуемых образцов при ослаблении сигнала 10 дБ.
Таблица 2. Результаты измерений
|
Среднее значение амплитуды структурного |
Усредненная |
Амплитуда дон- |
||||
№ |
шума по трем измерениям при ослаблении 10 |
амплитуда |
ного импульса |
||||
образца |
|
|
дБ, В |
|
структурного |
при ослаблении |
|
|
Поз. №1 |
Поз. №2 |
|
Поз. №3 |
Поз. №4 |
шума UСШ, В |
10 дБ UДС, В |
1 |
2,65 |
2,57 |
|
2,24 |
3,10 |
2,64 |
149,96 |
2 |
0,20 |
0,20 |
|
0,50 |
0,50 |
0,35 |
149,96 |
3 |
1,26 |
1,43 |
|
1,18 |
1,23 |
1,27 |
149,96 |
4 |
1,84 |
2,23 |
|
1,95 |
1,74 |
1,94 |
149,96 |
5 |
2,82 |
2,62 |
|
2,38 |
3,22 |
2,76 |
168,27 |
6 |
8,40 |
9,20 |
|
8,23 |
7,93 |
8,44 |
188,79 |
На рис. 6 приведен график отношения донный сигнал UДС - структурный шум UСШ для шести образцов.
440
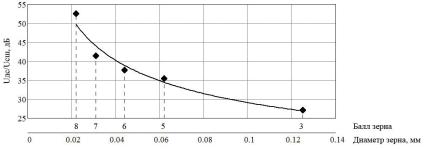
Рис. 6. График отношения донный сигнал – структурный шум
Выявлена прямая зависимость между величиной зерен в образцах исследуемой стали 45, полученных после различных видов термической обработки, и усредненной амплитудой структурных шумов.
Работа выполнена при поддержке программы стратегического развития Ижевского государственного технического университета им. М.Т. Калашникова на 2012-2016 годы (ПСР/М2/Н2.5/МВВ).
Список литературы
1.Алешин, Н.П. Методы акустического контроля металлов [Текст] / Н.П. Алешин, В.Е. Белый. – М: Машиностроение, 1989. – 457 с.
2.Стали и сплавы. Методы выявления и определения величины зерна [Текст]: ГОСТ 5639-82.-Введ. 1983-01-01.- М.: Изд-во стандартов, 1983. - 16 с.
Р. С. Быков, студент
А. И. Нистюк, доктор технических наук, профессор Ижевский государственный технический университет имени М. Т. Калашникова
Технология построения адаптивной маршрутизации
В работе рассматривается организация связи с помощью легких беспилотных летательных аппаратов (БПЛА). Актуальность темы определена необходимостью быстрой организации связи в труднодоступных районах.
Группа самоорганизующихся БПЛА может быть использована для быстрого создания линии связи в осложненных условиях, в таком случае каждый из них будет являться независимым маршрутизатором. Поднимаясь в воздух в пункте «А», они посылают широковещательные запросы и получают ответы от соседних аппаратов. Следуя заданному алгоритму, БПЛА должны создать цепочку связывающую пункт «А» с пунктом «Б». Таким образом, за считанные минуты организовывается канал связи.
441
Помимо решения задачи о преодолении большой дистанции, возможно так же обеспечить связью большую площадь. При этом стая БПЛА кружит над определенной территорией. Если расстояние между оконечным БПЛА и базой слишком велико, один из ближайших БПЛА используется как промежуточный узел.
С точки зрения большой пропускной способности такого беспилотного канала, для связи между дронами лучше всего предложить использование WiFi. Однако этот протокол совсем не адаптирован для создания сети с ячеистой топологией, в отличие от популярного ZigBee.
Протоколы ZigBee физически основаны на стандарте IEEE 802.15.4, цель которого ‒ предложить нижние слои (PHY и MAC) основания беспроводных сетей, ориентированных на низкую стоимость, низкое энергопотребление, простоту эксплуатации при небольших скоростях и при малой области приема. Возможность построения самоорганизующихся и самовосстанавливающихся сетей обеспечивается уже на сетевом уровне протоколами ZigBee.
Скорость канала по протоколу ZigBee в диапазоне 2,40 – 2,48 ГГц действительно невелика для современного представления – до 250 кбит/с при ширине канала 5 МГц. То есть общая скорость не превысит 4 Мбит/с.
Существенной проблемой линии связи на беспилотниках является их энергопотребление. Заряд аккумулятора расходуется на поддержку скорости, маневрирование летательного аппарата, а так же на питание модуля ZigBee или WiFi роутера. Для повышения надежности системы, а так же для сокращения времени организации сети можно использовать GPS, что так же увеличит расходы энергии. Использование на БПЛА аккумулятора большой емкости, а значит и большой массы, означает увеличение мощности мотора, увеличение габаритных размеров и стоимости аппарата, осложнение механизма запуска. В то же время сеть, организуемая группой беспилотников, недорога, мобильна и проста в плане установки. Время работы БПЛА в воздухе – 30 минут, после чего он должен быть отправлен на подзарядку. В каких-то случаях получасового сеанса связи может быть достаточно, в других – можно чередовать несколько групп аппаратов.
Такого рода связь может быть использована на месте аварий, катастроф и киберцентрических конфликтов.
442

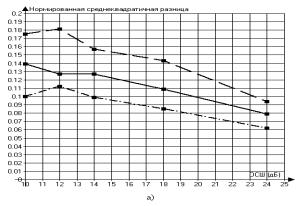
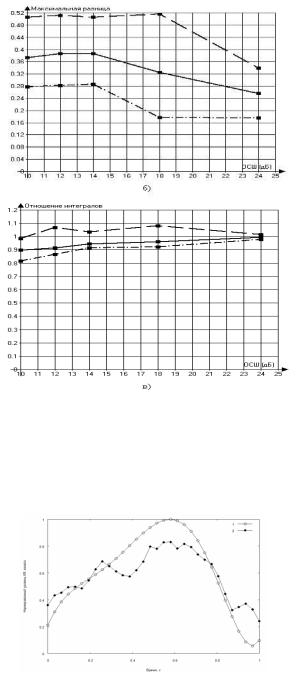
Рис. 1. Показатели качества оценивания ИХ канала связи
Рис. 2 – пример решения задачи: 1а – графики точного значения ИХ (линия 1) и полученной оценки (линия 2), 1б – графики точного значения входного сигнала (линия 1), возмущенного входного сигнала (линия 2), восстановленного сигнала (линия 3). Пример получен при ζx=0,06. Показатели качества: ОСШ 18,97 дБ, среднеквадратичная разница 0,102, максимальная разница 0,285, отношение интегралов 0,962.
а)
446
 б)
б)
Рис. 2. Пример решения модельной задачи
Полученные в испытаниях значения функции невязки показывают, что ее использование в качестве инструмента сравнения оценок невозможно ввиду большого разброса возможных значений (два порядка и более) и отсутствии связи с другими показателями.
Заключение
Исследовалась возможность применения метода регуляризации по А.Н. Тихонову для решения задачи оценивания ИХ канала связи в условиях присутствия помех. Результаты моделирования показывают, что метод может быть использован при обеспечении отношения сигнал-шум не менее 8-10 дБ при воздействии АБГШ и ИХ, имеющей один экстремум. Показатели качества оценивания ИХ могут быть интерпретированы в допустимые искажения сигналов, вызванные состоянием канала; позволят определить границы применимости метода при различных возмущающих воздействиях и форму зондирующего сигнала, обеспечивающую наилучшую оценку ИХ канала. Функция невязки не может быть использована для сравнения результатов оценивания, следовательно, необходимы другие показатели качества оценивания, не использующие априорною информацию. По результатам единичного испытания получение оценки ИХ с заданной точностью не представляется возможным. Необходимо использовать результаты нескольких оценок.
Работа выполнена в рамках Программы стратегического развития ФГБОУ ВПО «ИжГТУ имени М.Т. Калашникова» на 2012-2016гг.
Список литературы
1.Немцова, О.М. Методы решения обратных задач, выраженных интегральными уравнениями Фредгольма первого рода [Текст] / О.М. Немцова // Вестн. Удмуртск. ун-та. – 2005. – №4. – С. 23-34
2.Тихонов, А.Н. Методы решения некорректных задач [Текст]/ А.Н. Тихонов, В.Я. Арсенин. – М.: Наука, 1979. – 286 с.
3.Численные методы решения некорректных задач [Текст]/ А.Н. Тихонов [и др.].– М.: Наука, 1990. – 231 с.
4.Хелстром К. Статистическая теория обнаружения сигналов [Текст]/ К. Хэлстром..– М.: Издательство иностранной литературы, 1963. – 432 с.
447
О. П. Богдан, аспирант
О. В. Муравьева, доктор технических наук, профессор Ижевский государственный технический университет
имени М. Т. Калашникова
Оценка влияния артефакта «псевдопоток» на погрешность измерения скорости кровотока при ультразвуковой допплерографии
Ультразвуковая (УЗ) допплерография – один из самых современных методов оценки различных характеристик течения крови (скорость и направление движения крови, объем кровяной массы, движущейся с определенными скоростями) в сосудах любых типов. Сфера применения УЗ допплерографии в медицине очень широка. Этот метод используется для определения функционального состояния артерий, наличия или отсутствия кровотока, его скорости, наличии атеросклеротического стеноза или закупорке сосудов тромбами и т.д. [1].
Скорость кровотока в разных сосудах различна: в крупных артериях около 50 см/с, в средних и мелких артериях 20-40 см/с, в венах около 15 см/с, в капиллярах < 0,1 см/с. Погрешность измерения скорости кровотока при УЗ допплерографии связана с погрешностями проведения эксперимента (турбулентность, изогнутость и движение сосуда), погрешности датчика (угол ввода), погрешности обработки цифрового сигнала (анализ огибающей допплеровского сигнала, ошибки измерения индексов, расширение спектра) [2].
Дополнительной причиной погрешности измерения скорости кровотока при УЗ допплерографии является артефакт «псевдопоток», который заключается в отображении на экране сканера в режиме цветного или энергетического допплера реального движения неоднородной жидкости, возникающее под действием ультразвука [3]. Возникновение артефакта «псевдопоток» при исследовании может привести к неправильному определению скорости кровотока, при этом измеряется не истинная скорость кровотока, а некая сумма истинной скорости кровотока и дополнительной скорости движения частиц крови, вызванной воздействием УЗ излучения.
В связи с выше сказанным весьма актуальным является изучение влияния артефакта УЗ допплерогафии «псевдопоток» на достоверность оценки скорости кровотока.
Появление артефакта «псевдопоток» в неоднородных жидкостях в поле УЗ колебаний обусловлено появлением акустических течений, возникающих вследствие действия радиационного давления. Упрощенная модель артефакта УЗ допплерографии, основанная на совместном действии силы радиационного давления и выталкивающей силы, на среде с газовыми пузырьками представлена в [4]. Пример артефакта «псевдопоток» на модельной среде, вода с газовыми пузырьками, представлен на рис. 1, полученный с использованием системы УЗ допплеровского картирования
448
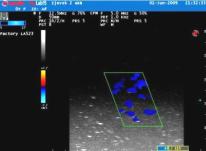
MyLab15. Окрашивание изображения в синий цвет показывает движение пузырьков газа, вызванное силой радиационного давления по направлению от датчика.
Рис. 1 Артефакт «псевдопоток» в модельной среде вода с газовыми пузырьками
Погрешность измерения скорости V, обусловленная влиянием артефакта «псевдопоток», может быть определена как скорость движения частиц крови (эритроцитов) при условии озвучивания неподвижной крови. Согласно модели артефакта «псевдопоток» погрешность измерения скорости кровотока зависит от интенсивности (рис. 2) и частоты излучения (рис. 3). Как видно из графиков (рис. 2, кривая 1 и рис. 3, кривая 1) погрешность измерения скорости кровотока незначительна и имеет порядок 10-5 см/с, что намного ниже чувствительности УЗ допплеровской системы ~ 0,1 см/с и практически не оказывает влияния на скорость кровотока.
Для повышения чувствительности УЗ допплерографии применяют контрастные вещества, представляющие собой раствор, содержащий газовые пузырьки размером от 1 мкм до 10 мкм. Как видно из рис. 2 при наличии в крови контрастных веществ погрешность измерения скорости кровотока, обусловленная артефактом «псевдопоток», растет с увеличением интенсивности УЗ излучения и становится соизмерима с чувствительностью допплеровской аппаратуры при I = 100 мВт/см2 для радиуса пузырька 10 мкм (кривая 3) и при I = 370 мВт/см2 для радиуса пузырька 1 мкм (кривая 2).
Зависимость погрешности измерения скорости кровотока с контрастным веществом, обусловленная артефактом «псевдопоток», от частоты УЗ излучения носит более сложный характер. В диапазоне частот от 1 МГц до 10 МГц погрешность измерения кровотока с контрастным веществом с большими размерами пузырьков (r=10 мкм, кривая 3) при I=350 мВт/см2 имеет порядок величины скорости медленного кровотока (0,1 см/с). Для контрастного вещества с малыми размерами пузырьков (r=1 мкм, кривая 2) частота 3,1 МГц является резонансной, а скорость его движения 300 см/с, что существенно превышает скорость кровотока.
449
Рис. 2. Зависимость величины погрешности измерения скорости кровотока от интенсивности УЗ излучения в дуплексном режиме (В-режим – f = 5 МГц, CMFрежим – f = 12,5 МГц): 1 – без контрастного вещества, 2 – с контрастным веществом (r=1 мкм), 3 ‒ с контрастным веществом (r = 10 мкм)
Рис. 3. Зависимость величины погрешности измерения скорости кровотока от частоты УЗ излучения (I = 350 мВт/см2): 1 – без контрастного вещества, 2 – с контрастным веществом (r=1 мкм), 3 ‒ с контрастным веществом (r = 10 мкм)
Таким образом, в отсутствии контрастного вещества артефакт «псевдопоток» не влияет на точность измерения скорости кровотока ни в крупных сосудах, ни в капиллярах. При введении в кровь контрастных веществ величина погрешности измерения скорости увеличивается, причем существенно для мелких сосудов с низким значением скорости кровотока, а также для крупных сосудов при введении контрастного вещества с пузырьками резонансного размера. Введение в кровь контрастного вещества не позволяет адекватно измерять скорость кровотока, и может лишь использоваться для визуализации проходимости крови по сосудам.
Работа выполнена в рамках проекта по государственному заданию Министерства образования и науки РФ ФГБОУ ВПО «Ижевский госу-
450

дарственный технический университет имени М.Т.Калашникова» на 2012 - 2014 годов в части проведения научно-исследовательских работ (регистрационный номер НИР: 7.1378.2011), при поддержке программы стратегического развития Ижевского государственного технического университета им. М. Т. Калашникова на 2012-2016 годы
(ПСР/М2/Н2.5/МВВ).
Список литературы
1.Ультразвук в медицине. Физические основы применения [Текст]/ под. ред. К. Хилла [и др.]; пер. Л.Р. Гаврилов, В.А. Хохлова, О.А. Сапожников. – М.: ФИЗМАТЛИТ, 2008. – 544 с.
2.Осипов, Л.В. Ультразвуковые диагностические приборы: режимы, методы и технологии. – М.: ООО ПКФ «ИзоМед», 2011. – 316 с.
3.Богдан, О.П. Влияние артефактов на результаты ультразвуковых допплеровских исследований /О.П. Богдан // Интеллектуальные системы в производстве. – 2009. – № 1 (13). – С. 173-180.
4.Коробейникова, О.В. Исследование физических механизмов артефакта ультразвуковой допплерографии «псевдопоток» /О.В. Коробейникова, Е.П. Кузнецов, О.П. Богдан // Медицинская физика. – 2009. – № 3 (43). С. 64–70.
Т. В. Брагина, магистрант П. А. Ушаков, доктор технических наук, профессор
Ижевский государственный технический университет имени М. Т. Калашникова
Опыт моделирования мемристора
До недавних пор считалось, что существуют три базовых элемента: резистор, конденсатор и катушка индуктивности, которые связывают попарно такие величины, как ток, напряжение, электрический заряд и магнитный поток.
Рис. 1. Зависимость между четыремя базовыми элементами цепи по теории Леона Чуа
451
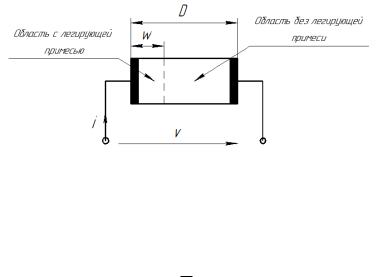
В1971 году Леон Чуа предсказал существование четвертого базового пассивного элемента, который был назван мемристор (англ. memristor, от memory ‒ «память», и resistor ‒ «электрическое сопротивление») [1].
Все это было в теории, пока в 2008 году Стенли Вильямс и его команда из компании Hewlett Packard не создали первый мемристор [2]. В последующее время стала актуальна идея создания модели работы данного элемента, чтобы можно было промоделировать работу устройств, основанных на данном элементе.
Встатье [3] была представлена Spice-модель мемристора, которая реализует главное свойство мемристора – зависимость сопротивления от интеграла тока, проходившего через него в прошлые моменты времени.
Физическая модель мемристора показана на рис. 2, где D – толщина
тонкой пленки оксида титана TiO2 (10 нм), расположенная между двумя платиновыми контактами. С одной стороны слоя находится легирующая примесь (положительно заряженные ионы), т.е. в области w. Данная область ведет себя, как проводник. Другая сторона не имеет легирующей примеси и ведет себя, как диэлектрик.
Рис. 2. Физическая модель мемристора.
В зависимости от электрического тока, проходящего через мемристор,
меняется ширина легирующей области w. Формула (1) определяет сумму всех сопротивлений мемристора, т.е. сопротивление в легированной и нелегированной области.
RMEM x RON x ROFF 1 x , |
(1) |
|||
x |
w |
0,1 |
(2) |
|
D |
||||
|
|
|
||
Ширина легированной области w зависит от длины D, следовательно,
w є [0…D]. |
|
Формула (3) показывает закон Ома, применяемый к мемристору. |
|
v t RMEM w i t |
(3) |
Скорость движения границы между легированной и нелегированной областью зависит от сопротивления легированной области и тока проходящего через нее, так же есть другие факторы, показанные в формуле (4).
452
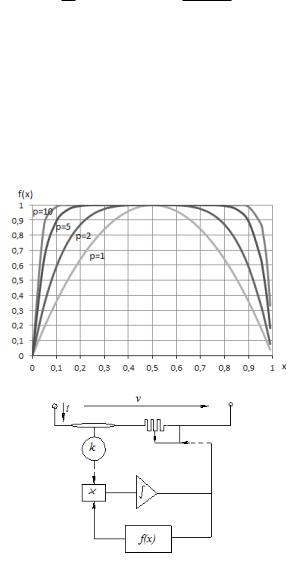
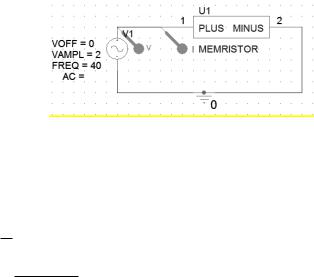
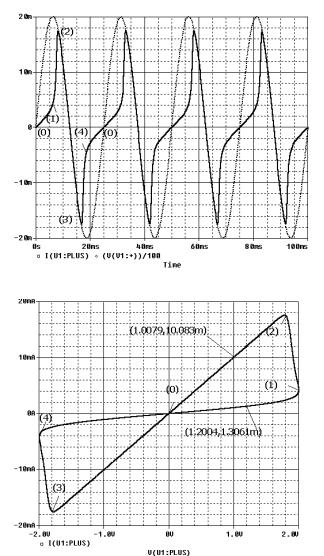
Рис. 6. Временные диаграммы тока и напряжения на мемристоре.
Рис. 7. Вольт-амперная характеристика мемристора.
Сопротивление мемристора зависит от тока, прошедшего через него в прошлом, т. е. мемристор имеет «память». Модель может применяться для создания устройств памяти, основанных на свойствах данного элемента.
455
Список литературы
1.Chua, L.O. Memristor – the missing circuit element / L.O. Chua // IEEE Trans.Circuit Theory.- 1971.-vol. CT-18.-no. 5.- P. 507 – 519.
2.Strukov, D.B. The missing memristor found [Текст]/ D.B. Strukov [и др.] // Na- ture.-2008.- 453 .- P. 80–83.
3.Biolek, Z. SPICE model of memristor with nonlinear dopant drift / Z. Biolek, D. Biolek, V.Biolková // Radioengineering.-2009.-18.- no. 2.-P. 210–214.
4.Елисеев, Н. Мемристоры и кроссбары: нанотехнологии для процессоров/Н. Елисеев// ЭЛЕКТРОНИКА: Наука, Технологии, Бизнес.-2010.-8.- С. 84-89.
И. А. Важенин, магистрант А. В. Абилов, кандидат технических наук, доцент
Ижевский государственный технический университет имени М. Т. Калашникова
Модификация системы веб-аналитики PIWIK и ее локализация в России
Веб-аналитика ‒ комплекс действий, направленных на получение и систематизацию любого рода статистических данных посетителей того или иного сайта в сети интернет с целью его последующего визуального и технического улучшения. Фактически с помощью веб-аналитики выявляются слабые и сильные стороны сайта. Соответственно, система вебаналитики – это автоматизированное программное обеспечение, которое включает в себя этот комплекс действий.
Работа посвящена модернизации и локализации Piwik – независимой системы веб-аналитики с открытым исходным кодом. Работа над модернизацией Piwik является актуальной по трем причинам:
1.Многие владельцы сайтов и веб-мастера не удовлетворены тем, что
вРоссии нет независимой системы веб-аналитики. Независимость означает то, что вся собираемая статистика и аналитические данные принадлежат именно владельцу сайта и никому больше. Никаких третьих лиц и организаций.
2.Piwik – единственная система веб-аналитики, претендующая стать реальным конкурентом Google Analytics и Яндекс.Метрики, основных игроков области, за счет того, что позволяет персонализировать систем у под индивидуальные нужды пользователя. Piwik имеет открытый исходный код.
3.Piwik уважает конфиденциальность данных интернет-пользователей, поэтому по желанию веб-мастера, можно скрывать данные об IP-адресе посетителей сайта в аналитических отчетах.
Однако при всех своих изначальных плюсах, Piwik имеет ряд недоработок и недостаток функционала, что мешает получить ему достаточное
456
распространение и стать реальной альтернативой конкурентам. Поэтому было принято решение модернизировать Piwik, исправить ошибки в работе, разработать новый функционал и создать полностью готовый для использования российскими интернет-пользователями скачиваемый программный продукт, который устанавливается на веб-сервер.
Модернизация: разработка нового функционала
Разработка нового отслеживающего алгоритма и кода
Отслеживающий код любой системы аналитики – один из ключевых факторов работы всей системы. Отслеживающий код – это JavaScript-код (изображен на рис. 1), который вставляется на страницы сайта и выполняется каждый раз, когда посетитель совершает какое-то действие: посещает сайт, переходит на другую страницу, взаимодействует с элементами сайта и так далее.
Проблема заключается в том, что отслеживающий JavaScript-код никак не скрывается на сайте и представлен любому любопытному посетителю в явном виде. Его может наблюдать каждый, просмотрев исходный код сайта (страницы), на котором тот находится. Любой интернет-браузер позволяет сделать это. Отслеживающий JS-код в том числе содержит информацию об адресе сервера статистики Piwik, куда отправляются данные
исами упоминания системы веб-аналитики Piwik.
Имногие серьезные коммерческие компании ‒ которые уделяют должное внимание вопросам конфиденциальности не только своих данных, но и данных об их посетителях ‒ не хотят, чтобы кто-то знал, какую систему веб-аналитики они используют, куда стекаются данные о посетителях сайта и использует ли компания какую-либо систему веб-аналитики вообще.
Таким образом, необходимо решить задачу скрытого отслеживания посетителей сайта и удовлетворить интересы многих коммерческих компаний. Конкуренты (другие системы веб-аналитики) не предоставляют такой возможности.
Был разработан способ отслеживания «Hidden Tracking» (рис. 2), который:
1.Позволяет незаметно для любопытных интернет-пользователей и потенциальных злоумышленников отслеживать посещения сайта.
2.Позволяет незаметно для поисковых систем и автоматических программ-сборщиков данных отслеживать посещения сайта.
3.Имеет значительно меньшую длину, что выполняет положительную эстетическую функцию при работе с ним для пользователей Piwik.
4.Принципиально новое отличие в коде «Hidden Tracking» заключается в том, что JS-код отправляет данные серверу статистики Piwik не напрямую, а посредством промежуточного PHP-файла. То есть полученные данные о посещении сайта обрабатываются и передаются
457
серверу уже с помощью этого PHP-файла, к которому нет доступа третьим лицам.
Рис. 1. Старый отслеживающий код Piwik. Пример
Рис. 2. Новый отслеживающий код Piwik (Hidden Tracking). Пример
Отслеживание посещений из социальных сетей
В связи с возросшей популярностью социальных сетей и высокой активностью их пользователей, было принято решение о создании удобного функционала для отображения переходов именно из социальных сетей.
Было собрано более 50 самых популярных социальных сетей и их логотипы в формате PNG. Понятно, что социальных сетей в современном мире просто огромное количество. Почему отдельным образом будут отображаться именно 50 из них? Потому что именно эти 50 наиболее популярны ‒ ими пользуется порядка 99,9% всех пользователей интернета. Соответственно нет нужды отслеживать другие, явно непопулярные соцсети.
Рис. 3. Разработанный виджет «Список социальных сетей» на главной панели Piwik.
458
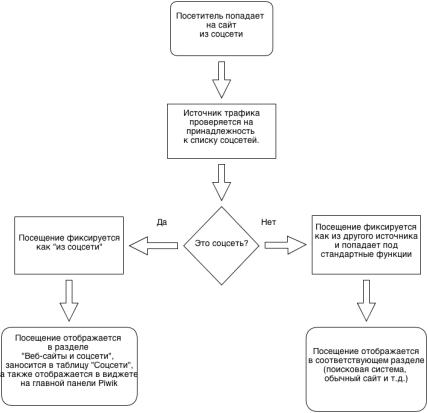
Рис. 4. Схематичный алгоритм работы функционала по отслеживанию посещений из социальных сетей
На рис. 3 изображен разработанный функционал «Список социальных сетей», который представлен в виде виджета на главной панели системы веб-аналитики. А на рис. 4 ‒ схематичный алгоритм работы функционала по отслеживанию посещений из социальных сетей. Каждый раз, когда система фиксирует посещение, его источник проверяется на «принадлежность» к списку социальных сетей и выводит соответствующие данные для этого посещения. Фиксируется количество посещений из конкретной социальной сети и конкретная страница социальной сети, с которой это посещение было совершено.
Для улучшения эффективности системы веб-аналитики был также реализован следующий новый функционал:
1.Функционал для анализа динамики любых численных показателей
2.Функционал отслеживания посещений в реальном времени
459
3.Официальный русскоязычный веб-сайт, который использует документацию по системе на английском языке, но вскоре будет переведен на русский.
4.Устранен ряд неисправностей в работе системы.
Предполагается, что в результате проведенной модернизации и локализации возрастет доля интернет-сайтов в России, которые используют Piwik как инструмент веб-аналитики.
Всередине 2011 года Piwik использовало лишь 0,2% сайтов доменной зоны .ru из тех сайтов в этой зоне, что использовали какую-либо из существующих систем веб-аналитики. К началу 2013 удалось увеличить этот показатель в два раза ‒ до 0,4%.
Piwik, как законченное серверное программное обеспечение, в результате работы эффективно решает задачи веб-аналитики, предоставляя коммерческим организациям и частным лицам гибкость в персонализации и независимость собираемых аналитических данных.
Поскольку оценить полезность разработки нового функционала и устранений неполадок в работе Piwik объективно и однозначно не всегда представляется возможным, было решено провести оценку модернизированной системы Piwik с помощью метода экспертных оценок.
Результаты оценки модернизации данной системы веб-аналитики представлены на рис. 5.
Воценке (на момент 05.02.13) приняло участие 128 ИТ-компаний из различных городов России. В таблице ниже представлены варианты, предложенные экспертам для оценки системы.
Таблица. Варианты оценки (ответа) на опрос экспертов о важности и эффек-
тивности улучшений системы веб-аналитики Piwik
Оценка, |
Словесный эквивалент оценки |
баллы |
|
1 |
Улучшения не важны, конкуренты вполне устраивают |
2 |
Улучшения маловажны, конкуренты по-прежнему впереди |
3 |
Улучшения частично важны, уровень конкурентов |
4 |
Улучшения важны, модификация стоит отдельного внима- |
|
ния |
5 |
Улучшения очень важны, ждали, когда такое предложат кон- |
|
куренты, будем рады попробовать Piwik |
460
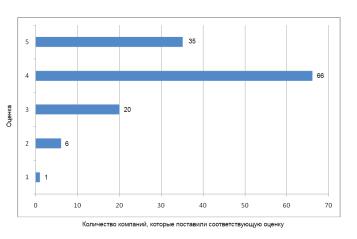
Рис. 5. Результаты проведенного опроса в рамках экспертной оценки улучшений системы веб-аналитики Piwik
На основании результата этого метода можно сделать вывод, что система веб-аналитики Piwik стала более эффективна и, как следствие, более конкурентоспособна. А дальнейшая преграда ее распространения заключается лишь в маркетинговой политике.
Список литературы
1. Кошик, А. Веб-аналитика 2.0 на практике. Тонкости и лучшие методики [Текст] /А.Кошик.- Диалектика, 2011. – С. 145-148
2.Хасслер, М. Веб-аналитика [Текст]. – Эксмо. – 2010. – С. 245-249
3.Официальный сайт системы веб-аналитики Piwik.-2013.-(http://piwik.org)
Д. С. Васильев, магистрант А. В. Чунаев, аспирант
А. В. Абилов, кандидат технических наук, доцент Ижевский государственный технический университет
имени М. Т. Калашникова
Анализ проблем программной реализации передачи потоковых данных в одноранговых сетях со структурой многослойного дерева
Сервис P2P-трансляций может стать альтернативой клиент-серверной модели организации видеотрансляций в Интернете. При P2P-трансляциях пользователи будут передавать видеопотоки друг другу, а центральные сервера системы используются для маршрутизации трафика между P2P-
461
клиентами и практически не задействуются для распространения самих видеопотоков. [4-5] Таким образом, сервис позволяет экономить на трафике при видеотрансляциях и, как следствие ‒ давать крайне привлекательные цены на организацию массовых видеотрансляций пользователям. Но необходимо, чтобы пользователи имели возможность просматривать видео в качестве сопоставимом с качеством в модели клиент-сервер.
Особенно важным при работе одноранговой сети со структурой многослойного дерева является вопрос удаления одного или нескольких клиентов из сети. Клиенты, передающие видеопоток текущему клиенту, называются предками данного клиента. В свою очередь клиенты, получающие видеопоток от данного клиента, называются потомками данного клиента. Главная проблема заключается в том, чтобы минимизировать количество потерь при отключении клиента от одноранговой сети такого вида. При анализе данной проблемы были рассмотрены два вида отключений: с сообщением об отключении и без подобного сообщения.
Для информирования об отключении использовалось сообщение, передаваемое на сервер по TCP-сокету и имеющие специальный идентификатор [2]. При корректном завершении клиентской части программы она выполняет отправку этого специального сообщения перед самым закрытием сокета. При просмотре дескрипторов TCP-сокета серверная часть программы получает данное сообщение и выставляет специальный флаг для данного сокета и клиента в целом, означающий, что на следующей итерации цикла данный клиент должен быть удален из сети, а сама сеть перестроена.
Для перестройки многослойного дерева в ситуации с удалением одного клиента необходимо информировать предков данного клиента о том, что он отключился, что осуществляется с помощью соответствующего сообщения. Самое важное для уменьшения потерь при переключении оперативно информировать предков данного клиента об адресах потомков данного клиента, чтобы вместо пересылки пакетов на уже несуществующий клиент, предки стали отправлять пакеты, предназначенные удаляемому клиенту на потомков удаляемого клиента, если таковые существуют.
На рис. 1 показаны два варианта переключения путей в многослойном дереве с коэффициентом многослойности равным трем. В левой части рисунка показан вариант переключения с потерей строгой структуры многослойного дерева. В этом случае отключение всех клиентов той же глубины, что и клиент 4 приведет к утрате многослойности на промежутке между клиентами 1‒3 и 6‒8. В правой части рисунка показан вариант перестройки дерева, когда один из клиентов (клиент восемь), не имеющих своих потомков, переключился на место отключенного клиента 4. Это позволяет сохранить строгую структуру многослойного дерева, но
462
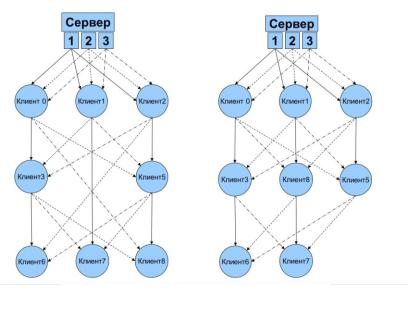
приводит к большему количеству пересылок управляющих сообщений и, соответственно, временным затратам на переключение. В программе реализован первый вариант переключения.
Таким образом, передача пакетов будет осуществлена в обход удаленного клиента. Если к сети подключится новый клиент, то он займет место одного из уже удаленных, причем начиная от корня многослойного дерева. В том случае, если клиент завершил свою работу некорректно и специальное сообщение не было направлено на сервер, потомки отключившегося клиента выполняют запрос активности своего удаленного предке. Если предок не отвечает, то потомки запрашивают сервер об удалении соответствующего пира из структуры дерева согласно вышеописанному алгоритму.
Рис. 1. Два варианта переключения участников сети после удаления клиента четыре
На рис. 2 рассмотрено поведение потомков при отключении одного из предков. Потомки отправляют запрос активности на бездействующего предка и одновременно производят запрос потерянных пакетов с двух других своих предков с использованием запросов, рассмотренных в предыдущем пункте. После того, как будут выполнены три запроса активности и они останутся без ответа или же, если клиент 4 закроет соединение со своей стороны, потомки отправят квитанции с нужным идентификатором и данными о клиенте четыре на сервер, и сервер по их запросу перестроит сеть в обход отключившегося клиента.
В том случае, если у предка нет потомков, то он является последним клиентом цепочки данного дерева. Таких клиентов будем называть
463
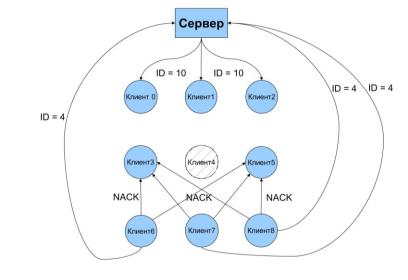
«листья». Информация о его некорректном отключении будет получена в ходе запроса активности листьев дерева, осуществляемого самим сервером.
Рис. 2. Поведение участников сети при отключении четвертого клиента
При подсчете коэффициента потери пакетов на каждом из участников сети обнаруживаются номера потерянных пакетов. Эти пакеты теряются из-за умышленного внесения ошибок или же из-за особенностей канала связи [1, 3]. Независимо от этого, при обнаружении потерянных пакетов их номера помещаются в сообщения, изображенные на рис. 3. Поле «Номер запроса» позволяет понять сколько раз запрашивалась текущая пачка потерянных пакетов. В сообщении, изображенном выше, поле «Количество очередей» содержит 1, так как данный вид сообщения формируется сразу после обнаружения потери пакетов и содержит только одну пачку. Далее указываются номер первого потерянного пакета и длина пачки. В нижнем сообщении количество пачек больше либо равно одной, так как это сообщение информирует предка о потери сразу нескольких пачек пакетов. Если отправленный запрос достигнет адресата, то предок в свою очередь имеет два возможных варианта действия:
1.Выслать запрашиваемые пакеты, если они имеются в его буфере.
2.Выслать сообщение потомку, если каких-либо пакетов нет в буфере.
464
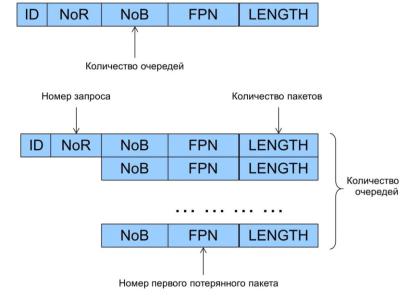
Рис. 3. Сообщения, содержащие запросы клиентов о потерянных пакетах
Перезапрос реализован в основном цикле клиентской части программы [6]. В результате работы исправления потери пакетов на основе перезапроса одноранговая сеть может исправить потери пакетов при удалении одного участника сети. Кроме того, благодаря перезапросу потерянных пакетов клиенты сети могут избежать снижения качества воспроизведения в плохих каналах связи.
Сеть, с рассмотренным алгоритмом функционирования реализована программно и восстанавливает потери пакетов благодаря перезапросу пакетов из буфера. С помощью перезапроса могут быть восстановлены потери пакетов при удалении участника сети или на плохом канале связи. Восстановление потерянных пакетов позволяет участникам одноранговой сети свободно покидать ее состав, в том числе без извещения об этом источника передачи. Значительный минус предложенного решения – серьезная нагрузка на процессор.
Были реализованы алгоритмы организации одноранговой сети, алгоритмы управления сетью, внесения потери пакетов, обнаружения потери пакетов и восстановления пакетов с помощью перезапроса.
Список литературы
1.Марков, М.В. Модели дискретных каналов связи /М.В.Марков.-М, 2004
2.Фейт, С. TCP/IP: Архитектура, протоколы, реализация/С.Фейт-М.: Изд-во ЛОРИ.-2000. - 450 c.
465
3.Hasslinger, G. Model for Packet Loss in Real Time Services on the Internet /G. Hasslinger [и др.].- Resilient P2P Streaming.- 2003
4.Schollmeier, R.A. Definition of Peer-to-Peer Networking for the Classification of Peer-to-Peer Architectures and Applications [Текст]/ R. Schollmeier // Proceedings of the First International Conference on Peer-to-Peer Computing.-IEEE, 2002.
5.RFC 3366, Advice to Link Designers on Link ARQ. - 2002.
Д. Р. Гиззатуллин, бакалавр; Я. В. Заболотских, бакалавр С. В. Ершова, бакалавр; Ю. В. Русленникова, бакалавр А. Р. Сулейманова, бакалавр
В. В. Муравьев, доктор технических наук, профессор Ижевский государственный технический университет имени М. Т. Калашникова
Металлографический анализ термически обработанных сталей
В данной работе исследовали прутковый прокат из стали марки 60С2А, используемый при производстве винтовых цилиндрических железнодорожных пружин горячей навивки по технологической схеме высокотемпературной термомеханической обработки, позволяющей получить высокий уровень эксплуатационных характеристик за счет формирования сверхмелкозернистой структуры в стали [1].
Для исследований структуры металла после термической обработки изготовлены образцы прутков, в которых были реализованы различные структурные состояния. Образец № 1 соответствовал состоянию поставки, остальные состояния получены при отработке операций технологического цикла на стадии термической обработки. Во всех случаях нагрев осуществлялся до температуры 870 °С токами высокой частоты (ТВЧ) или в электропечи. Охлаждение образцов проводилось в полимерной закалочной жидкости (ПЗЖ) Feroquench 2000 с последующим отпуском или без него.
Металлографический инвертированный цифровой комплекс Альтами МЕТ 1М предназначен для исследования микроструктуры металлов и сплавов в отраженном свете в светлом поле при прямом освещении.
Наличие фотоприставки дает возможность получать цифровые снимки высокого качества на экране компьютера или телевизора с последующей обработкой или оценкой компьютерными методами.
Образец № 1 подвергался нагреву в электрической печи до температуры 870 °С с выдержкой 20 минут, затем закалке в масле и среднему от-
пуску в электрической печи при Tотпуск=450 °С с выдержкой 1 час. Полученная микроструктура – мелкозернистый перлит, обезуглероженного
слоя нет.
466
Образец № 2 подвергался нагреву ТВЧ до температуры 870 °С с выдержкой 15 секунд и охлаждению на воздухе. Его микроструктура это пластинчатый перлит, обезуглероженного слоя нет.
Образец №1 |
Образец №2 |
Образец №3 |
Образец №4 |
Для образца № 3 использовался нагрев под закалку ТВЧ до температуры 870 °С, с выдержкой 20 секунд, охлаждение в ПЗЖ, 12% концентрация в воде, ТПЗЖ =25 °С, средний отпуск в электрической печи при Тотпуск =410 °С, выдержка – 75 минут. Микроструктура троостомартенсит 3 – 4 балл.
Образец № 4 подвергался нагреву под закалку ТВЧ до температуры
870 °С, выдержка 15 секунд, охлаждению в воде, Тводы=45 °С. Микроструктура: мартенсит по всему сечению, обезуглероженного слоя нет.
Для образца № 5 использовался нагрев под закалку ТВЧ до температуры 870 °С, выдержка 20 секунд, закалка ПЗЖ, 12 % концентрация в воде, ТПЗЖ= 25 °С. Микроструктура: мартенсит 6‒7 балл, обезуглероженного слоя нет.
Образец № 6 – нагрев под закалку ТВЧ до температуры 870 °С, выдержка 15 секунд, охлаждение в ПЗЖ, концентрация в воде 6%, ТПЗЖ =55 °С. Микроструктура неравновесная, в ее состав входят: мартенсит, сорбит и продукты не мартенситного распада.
467
Образец №5 |
Образец №6 |
Образец №7 |
Образец №8 |
Образец № 7 – нагрев в электрической печи до температуры 870 °С, выдержка 35 минут, закалка в ПЗЖ, 11% концентрация в воде, ТПЗЖ=25оС. Микроструктура мартенсит, троостит, пластинчатый перлит, мелкозернистый феррит. Обезуглероженный слой равномерный по всей окружности прутка глубиной 0,7 мм, крупнозернистый феррит.
Образец № 8 – нагрев под закалку ТВЧ до температуры 870 °С, выдержка 15 секунд, охлаждение в ПЗЖ, 12% концентрация в воде, ТПЗЖ=25 °С,
отпуск в электрической печи при Тотпуск=250 °С, выдержка 75 минут. Микростуктура троостит, пластинчатый перлит, мелкозернистый феррит,
обезуглероженный слой равномерный по всей окружности прутка глубиной 0,4 мм, крупнозернистый феррит.
Работа выполнена при поддержке программы стратегического развития Ижевского государственного технического университета им. М.Т. Калашникова на 2012-2016 годы (ПСР/М2/Н2.5/МВВ).
Список литературы
1. Муравьев, В.В. Контроль качества термической обработки прутков из стали 60C2A электромагнитно-акустическим методом [Текст] / В. В. Муравьев, О. В. Муравьева, Е. Н. Кокорина.- Дефектоскопия.- №1.- 2013.- С. 20-32.
468
А. А. Головкова, студент
А. И. Нистюк, доктор технических наук, профессор Ижевский государственный технический университет имени М. Т. Калашникова
Анализ прохождения радиоволн через геологические породы
Встатье проведен анализ источников информации с целью определить основные направления исследований по распространению радиоволн в горных породах для создания систем оповещения аварийных ситуаций при горнорудных работах.
ВФедеральном законе от 21.07.1997 №116-ФЗ «О промышленной безопасности опасных производственных объектов» понятие «промышленная безопасность» определяется как состояние защищенности жизненно важных интересов личности и общества от аварий на опасных производственных объектах и последствий указанных аварий. Защищенность характеризует степень ослабления действующих на объект нагрузок от потенциальных опасностей.
Во всех странах на фоне роста добычи абсолютное число погибших в среднем снижается, т.е. существует тенденция к защите человека от производственных опасностей. Это связано с развитием новых технологий как добычи ископаемых, так и систем обеспечения безопасности, в частности радиосвязи через горные породы. Горно-геологические, горнотехнические условия ведения работ в достаточной степени специфичны для отдельных предприятий. Это обуславливает применение различных технологий, техники, принятия комплекса мер по обеспечению безопасного ведения горных работ и своевременного оперативного оповещения персонала об аварии, в частности по радиоканалу [1].
Широкий круг вопросов, связанных с использованием радио в геологоразведочном и горном деле, затрагивается в книге немецкого геофизика В. Фрича «Основы радиогеологии», где рассмотрены вопросы распространения радиоволн в шахтах. В. Фричем были описаны работы, проводимые в германских рудниках с целью изучения распространения радиоволн в различных горных породах. В соляных месторождениях дальность радиосвязи на частоте 3 МГц составляла 14 км.
Результаты исследования поглощения электромагнитных волн в земле при использовании скважинной аппаратуры изложены В.К.Притчеттом [2].
Вработе Хеукока О. К., Мэдсена Е. К. и Харста С. Р. [3] приведены экспериментальные измерения скорости распространения, затухания и длины электромагнитных волн в различных горных породах. Обращено внимание на преимущество применения радиосигналов с частотной модуляцией.
469
Джермен-Джонс Д. Г. [4] описывает проведенную работу по оконтуриванию нефтяных залежей, причем достигнуты глубины от 100 до 3000 м, но детали проведенных работ в печати не освещены.
Баррет В. М. [5] предложил метод, названный им «Радойл», для получения отраженных волн от слоя с пониженным сопротивлением, причем указывается на наличие селективного поглощения радиоволн для каждой среды.
В1950‒1952 гг. университет в Миннесоте (США) провел исследования условий распространения радиоволн в диапазоне частот 30-200 кГц на медных рудниках Монреаля и Мичигана. Максимальная дальность связи составила 450 м в твердых породах [6].
Проводились работы по радиопоискам подземных вод в пустынных районах Египта, в результате которых был определен водоносный горизонт на глубине около 900 м [7].
Работами Лаборатории горных исследований Трансвааля и Оранжевой республики (Южная Африка) достигнута дальность радиосвязи через массив горных пород на золотых рудниках до 765 м на частоте 335 кГц [8].
Фирма Деко (США) на глубине 300 м под землей провела испытания системы Литком. Передатчик и приемник размещались на расстоянии 7 км. Передача велась на частоте 150 кГц через слой каменной соли при мощности передатчика 200 Вт. Отмечается, что слой земли хорошо экранировал линию связи от внешних помех.
Проведенный обзор выполненных до 1963 г. работ и собственные исследования позволили рекомендовать диапазон частот 100‒200 кГц, как менее подверженный помехам и обеспечивающий большие дальности при наличии металлических «направляющих».
ВАвстрии в I96I-I964 гг. университетом г. Инсбрук в шахтах Тироля проведены исследования условий распространения сверхдлинных волн частотой 3‒30 кГц, сравнение электрических и магнитных диполей и их поведения в горном массиве.
Представляют интерес данные, полученные в 1968 г. в соляных шахтах ФРГ, подтверждающие возможность беспроводной связи на расстояниях до 4,2 км на частоте 5 МГц и до 2 км на частоте 30 МГц при использовании электрических антенн длиной до 12 м.
В1969 г. опубликованы работы по экспериментальным исследованиям распространения электромагнитных колебаний в угольных шахтах в диапазоне частот от 50 до 1000 кГц, проведенным в Англии и показавшим, что затухание радиоволн при распространении вдоль пласта угля слабо зависит от частоты и составляет 0,1 Нп/м для частоты 60 кГц, 0,07 Нп/м для частоты 170 кГц и 0,15 Нп/м для частоты 300 кГц .
Последние годы наибольший объем работ за рубежом выполнен по горноспасательной шахтной радиосвязи Горным бюро США. Был выполнен значительный объем экспериментов в подземных условиях ряда угольных шахт, в результате которых оценена вероятность получения до-
470
стоверных сигналов с глубины до 300 м. Разработана опытная аппаратура на частоты 350, 520 и 820 кГц, испытания которой в 1982 г. подтвердили принципиальную работоспособность системы.
Практически не уделено внимание распространению радиоволн в районах многолетнемерзлых горных пород и ледных толщ [9].
Анализ состояния изученности закономерностей распространения радиоволн показывает, что в горных породах наблюдается большое затухание сигнала, дальность передачи радиоволн в значительной степени определяется составом, структурой и электрическими характеристиками пород, проникающая способность радиоволн зависит от частоты сигнала и его спектра. Наиболее перспективными направлениями исследований будут являться изучение распространения радиоволн в горных породах Антарктиды и шельфа Арктики.
Список литературы
1.Капаев, А.Е. Радиосвязь под землей. Проблемы и пути решения /А.Е. Капаев, Е.А. Котова // Горная Промышленность, 2004.- №1
2.Pritchett, W.C. Attenuation of radio frequency waves throughthe earth. Geophysics / W.C.Pritchett, 1952.- V. XVIII.-Nо. 2.
3.Zeitern. Bergbau Technik, 1952.- Nо 12.
4.Reweines of Petroleum Technology, 1952.-V. 12.
5.Barret, W.M. Radoil. World Petroleum /W.M. Barret.- 1952.-V. 23.-No. 3.
6.Felegi, E.W. Underground Radio Communication in Lake Superior District Mines [Текст]/ E.W. Felegi.- Mining Engineering, 1953.- No. 5.-P.518-521.
7.El-Said, M.A.H. Geophysical prospection of underground waterin the desert by
means of electromagnetic fringes [Текст]/ M.A.H. El-Said/ -Proceedings of the JRE, 195б.-V. 44.
8.Mc Adam, R. Wireless communication underground. Colliery Guard[Текст]/R. Mc Adam, 1962.-204.-No. 5256.-P. 54-57.
9.Кореннов, Б.И. Исследование условий распространения радиоволн на шахтах Севера и разработка аппаратуры шахтной радиосвязи [Текст]/ дис... канд. техн. наук/Б.И. Кореннов.- Якутск, 1983.-162 c.
А. А. Головкова, студент
А. И. Нистюк, доктор технических наук, профессор Ижевский государственный технический университет имени М. Т. Калашникова
Аварийное оповещение на горнорудных предприятиях
Целью данной статьи является освещение существующих систем аварийного оповещения и анализ возможности построения подобных систем на технологии WiFi.
471
Вкачестве систем аварийного оповещения на рудниках и шахтах применяются [1]:
‒ световая сигнализация (мигание общешахтным освещением); ‒ телефонная связь в качестве канала информации об аварии;
‒ ароматическая (подача ароматических веществ в подающую струю воздуха);
‒ системы, использующие односторонний канал радиосвязи сквозь толщу горных пород (комплекс аварийного оповещения типа «СУБР»).
На рынке в качестве оборудования для целей аварийного оповещения предлагаются системы, использующие радиосвязь по излучающему кабелю, радиосвязь вдоль естественных направляющих. Для того, чтобы оценить эти системы с точки зрения пригодности для целей аварийного оповещения подземного персонала, сформулируем основные требования, которые должны предъявляться к таким системам.
Требования, которым должны соответствовать системы аварийного оповещения подземного персонала рудников и шахт, исходя из решаемых ими задач [2] следующие:
‒ оповещением должна быть охвачена вся зона подземных горных выработок;
‒ системы должны обеспечивать прием сигналов оповещения каждым находящимся в подземных выработках рабочим независимо от места нахождения;
‒ системы оповещения должны оставаться работоспособными после возникновения аварийной ситуации;
‒ время оповещения должно занимать нескольких минут; ‒ объем информации, передаваемой оповещением, должен быть доста-
точен для понимания персоналом характера аварии.
Очевидно, что при невыполнении, хотя бы одного из этих требований нельзя рассчитывать, что подземный персонал будет оперативно эвакуирован из опасной зоны.
Вто же время системы, использующие радиоканал, действующий через толщу горных пород («ЗемляЗМ», «Радиус-2», «СУБР-1СВМ», «СУБР-1П» и другие), успешно применяются в качестве аварийного оповещения уже много лет на горнорудных предприятиях Российской федерации, Радиоканал сквозь толщу горных пород в тональном диапазоне частот для средств аварийной радиосвязи различного назначения успешно начинают использовать в США, Канаде, Австралии.
К достоинствам этих систем следует отнести:
‒ высокую степень гарантии доставки сигнала аварийного оповещения независимо от местоположения персонала во всевозможных аварийных ситуациях при разрушении и затоплении горных выработок, пожарах, отсутствии энергообеспечения, высокой загазованности атмосферы и прочих;
472
‒полное покрытие всей зоны горных выработок радиосигналом, в том числе с учетом перспективы развития горных работ;
‒возможность расположения антенно-фидерных устройств на поверхности и/или в подземных выработках;
‒высокую степень готовности и надежности, обеспечиваемая за счет развитой самодиагностики, полного резервирования передатчиков и частичного резервирования антенны;
‒отсутствие необходимости в переконфигурировании, использовании дополнительных технических средств, проведении монтажных и наладочных работ при продвижении горных выработок (новые участки, горизонты), т.е. характеризуются низкой стоимостью эксплуатации.
К недостаткам систем, использующих радиоканал сквозь горный массив, следует отнести их низкую информативность вследствие узкополосности самого радиоканала. Однако и в этой части ситуация в последнее время существенно поменялась в лучшую сторону. Например, у системы СУБР-1П появилась опция передачи текстовой информации о месте и характере аварии, принимаемой на индивидуальные и групповые текстовые приемники, входящие в состав системы.
Система связи на основе технологии микросотовой связи WiFi базируется на проводных линиях связи. Их основные элементы ‒ базовые станции (приемопередатчики с зонами покрытия от 50 до 500 м) и индивидуальные приемопередатчики. Недостаток таких систем связан со сложной подземной инфраструктурой (десятки и сотни устройств и километров кабеля). Обрыв линии связи приводит к потере возможности аварийного оповещения для значительных участков горных выработок.
WiFi-системы можно позиционировать как универсальное средство передачи информации, с использованием которой могут решаться всевозможные задачи связи, наблюдения, диспетчеризации и оповещения. Такие системы могут частично выполнять функции аварийного оповещения на небольших шахтах-лавах. Для остальных шахт их можно рассматривать как дополняющие средства аварийного оповещения и как системы связи в аварийной ситуации в тех местах и зонах, где сохранилась их работоспособность после аварии.
В системах радиопередачи через толщу горных пород используются антенно-фидерные устройства, которые располагаются на поверхности или, в крайнем случае, в подземных выработках с низкой вероятностью повреждения. Сигналы принимают индивидуальные радиоблоки, встраиваемые в головные светильники, или стационарные приемники, устанавливаемые в местах наиболее вероятного нахождения людей. Системы оповещения на основе микросотовой связи действуют только в зонах действия подземных стационарных приемопередатчиков. Очевидно, что зоны действия приемопередатчиков этих систем должны покрывать все горные выработки по всей их протяженности. С учетом того, что реальная дальность высокочастотной связи не превышает 150...200 м в прямой видимо-
473
сти, такие системы в случае их реализации в подавляющем большинстве случаев не обеспечат связь после возникновения аварийной ситуации.
В дальнейшем аварийное оповещение скорее всего будет развиваться в направлении совершенствования систем, действующих через горный массив. Другие средства связи могут использоваться лишь как дополнительные средства оповещения, существенно улучшающие оперативность управления во время ликвидации аварии в тех местах, где эта связь была возможна и не была повреждена вследствие действия факторов аварии
Таким образом, единственной технологией, обеспечивающей гарантированную доставку сообщения об аварии персоналу в подземных выработках независимо от места их расположения и при любых разрушениях в шахте, служит технология радиопередачи сквозь толщу горных пород. Системы связи на основе микросотовой связи и активных радиометок формально могут использоваться для аварийного оповещения, однако им будут присущи следующие недостатки: высокая вероятность выхода из строя из-за наличие в горных выработках оборудования и разветвленной кабельной сети, сложность обеспечения необходимой степени радиопокрытия; высокая вероятность появления зон с радиотенью при ведении горных работ; значительная стоимость эксплуатации из-за необходимости постоянного обслуживания технических и программных средств.
Список литературы
1. Бабенко, А.Г. Принципы построения многофункциональных систем безопасности угольных шахт, опыт и перспективы их использования/А.Г. Бабенко [и др.] // Безопасность труда в промышленности.- 2011.- №1
2.Концепция подпрограммы «Современные средства индивидуальной защиты
исистемы жизнеобеспечения подземного персонала угольных шахт» [Текст]:федер. целевая программа «Национальная технологическая база» на 20132016 годы (проект)// Сайт министерства энергетики Российской Федерации.-2012.-
(http://minenergo.gov.ru)
А. А. Головкова, студент
А. И. Нистюк, доктор технических наук, профессор Ижевский государственный технический университет имени М. Т. Калашникова
Анализ комплекса аварийного оповещения для угольных шахт
Для построения систем аварийного оповещения необходимо провести анализ наиболее удачных и распространенных на практике действующих комплексов. Как действуют такие системы, рассмотрим на примере комплекса аварийного оповещения СУБР-1П, как имеющего в настоящее
474
время наибольшее распространение и наиболее развитые функциональные возможности [1].
Комплекс состоит из передающего комплекта, передающей антенны и приемных устройств, которыми снабжаются все подземные горнорабочие. В состав передающего комплекта входят два передатчика (ПРД) - основной и резервный, пульт диспетчера (ПД), блок ограничения токов (БОТ). Передатчик комплекса (ПРД) и пульт диспетчера (ПД) располагаются на поверхности и осуществляют формирование, и передачу сигналов аварии, индивидуального вызова и текстовой информации. В случае расположения антенны в горных выработках, опасных по газу и пыли, выход передатчика ПРД подключается к передающей антенне через блоки ограничения токов БОТ. БОТ предназначен для ограничения величины тока антенны на искробезопасном уровне и отключения выходного напряжения передатчика от антенны комплекса в аварийных режимах.
Передающая антенна комплекса представляет собой заземленный диполь или рамку, охватывающую шахтное поле и может располагаться как на поверхности над шахтным полем, так и в подземных выработках. Схема расположения частей комплекса показана на рисунке. Поскольку комплекс СУБР-1П, как и все системы аварийного оповещения этого типа, работает в тональном диапазоне радиочастот (~1000 Гц), передающая антенна комплекса имеет весьма значительную протяженность, вплоть до десятков километров и, следовательно, большое индуктивное сопротивление, для компенсации которого используются блоки согласующих конденсаторов (БСК).
К приемным устройствам комплекса относятся шахтные головные светильники со встроенными радиоблоками СУБР-01 СМ или СУБР-02СМ, а также стационарные приемники группового оповещения СУБР-1СП и приемники текстовой информации СУБР-1ТП. Радиоблоки СУБР-01 СМ или СУБР-02СМ располагаются в крышке батареи питания светильника и обеспечивают прием радиосигналов комплекса. В состав радиоблоков входят активные приемопередатчики высокой частоты («метки») с помощью которых обеспечивается мониторинг персонала в подземных горных выработках, если рудник или шахта используют систему позиционирования горнорабочих и транспорта СПГТ-41. Приемными устройствами снабжаются все горнорабочие, находящиеся в подземных горных выработках. Количество приемных устройств комплекса определяется численностью подземного персонала конкретной шахты или рудника. Для проверки работоспособности приемных устройств перед спуском в шахту используется устройство испытательное (УИс). Управление комплексом осуществляется с пульта, который располагается у диспетчера рудника и имеет с передатчиком цифровую связь по выделенному каналу или через информационную сеть предприятия. Передатчик по команде с пульта формирует низкочастотный сигнал, осуществляет его усиление и генерацию в антенну, располагаемую над шахтным полем и/или в подземных
475
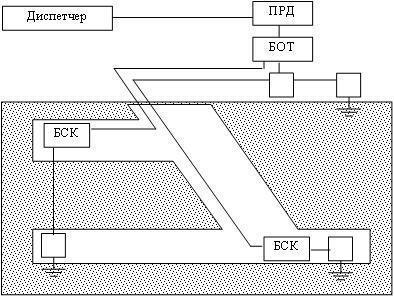
выработках. Приемные устройства принимают передаваемый низкочастотный сигнал и преобразуют его в кодовое мигание лампы головного шахтного светильника. Комплекс одновременно может передавать текстовые сообщения, которые воспринимаются индивидуальными текстовыми приемниками СУБР-1ТП и приемниками группового оповещения СУБР-1СП. Для сокращения времени передачи текстовой информации в памяти текстовых приемников формируются таблицы стандартных и аварийных текстовых сообщений, и во время аварии передается только номер сообщения, а приемник согласно этому номеру отражает на индикаторе текст и дополнительно озвучивает его через громкоговорители.
Рис. 1. Схема работы комплекса аварийного оповещения СУБР-1П.
Использование для передачи сигналов аварии тонального диапазона радиочастот при правильной конфигурации АФУ обеспечивает прохождение радиосигналов по всему шахтному полю сквозь толщу горных пород вплоть до глубин в 1000 м и практически при любом простирании шахтных полей в проекции на горизонтальную плоскость.
Применение таблицы стандартных аварийных (по плану ликвидации аварий) и служебных текстовых сообщений, заранее заносимых в память приемных устройств, позволили при низкой пропускной способности радиоканала комплекса обеспечить вполне удовлетворительную информативность и быстродействие.
Список литературы
1. Комплекс СУБР.-2013.-(http://www.uraltexis.ru/prod/tovars/_aview_b12)
476
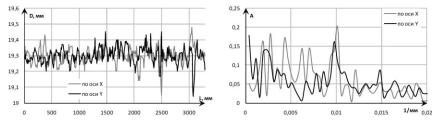
Р. Ф. Зарипов, магистрант В. А. Стрижак, кандидат технических наук, доцент
Ижевский государственный технический университет имени М. Т. Калашникова
Влияние регулярных перепадов сечения на контролепригодность прутка
Среди продукции предприятий черной металлургии большой объем занимает стальной прутковый прокат, в том числе используемый в качестве заготовок при производстве насосных штанг. Важнейшим условием производства прутков высокого качества является отсутствие различных дефектов, возникающих в процессе производства прутков. На практике среди прутков встречается прокат с изменением диаметра по длине прутка. Последнее может быть вызвано технологическими ошибками при производстве проката, например в процессе прокатки, или шлифовки прутков со специальной отделкой поверхности.
На исследование представлено два прутка заготовок насосных штанг. Данные прутки имеют особенности препятствующие проведению волноводного контроля с использованием дефектоскопа АДНШ (предположительно вариация сечения).
а) |
б) |
Рис. 1. Вариация сечения прутка: а) распределение диаметра по длине,
б) распределение периодичности изменения диаметра
Оценка вариации сечения прутка получена измерением диаметра прутка в сечения с шагом 10 мм в двух перпендикулярных направлениях (точность 0,01 мм). Данные прутки в дальнейшем предназначены для изготовления насосной штанги по ГОСТ 13877-96 [1]. Допуск на диаметр тела прутка составляет 19,1+0,20-0,41 мм. Средний диаметр тела прутков составил 19,3 мм. При этом диаметр меняется от максимального значения D = 19,48 мм до минимального значения D = 19,05 мм. Как следует из графика (Рис. 1, а), в теле прутка присутствуют значительные дефекты типа овальности на фоне регулярных незначительных изменений среднего
477


Рис. 4. Величина сигнала отраженного от перепадов
Разным ЗИ соответствует различные величины сигналов отраженных от перепадов сечения. Для случая с коротким по длительности зондирующим импульсом, его спектр получается широким и зависимость шумсигнал от частоты зондирующего импульса имеет один максимум на частоте 16 кГц. С увеличением длительности зондирующего импульса, спектр сужается, а график зависимости приобретает большее число максимумов, на частоте 20 кГц, 40 кГц и 61 кГц.
С помощью дефектоскопа АДНШ-2 был проконтролирован ранее исследованный пруток длиной 3м. Функциональная схема экспериментальной установки представлена на рис. 5. В прутке 1 длиной L с помощью электромагнитно-акустического преобразователя 2 (ЭМАП), расположенного вблизи одного из торцов прутка, возбуждаются короткие акустические импульсы, которые после прохождения по прутку регистрируются приемным пьезоэлектрическим преобразователем 3 (ПЭП) приложенным к тому же торцу прутка. Сигнал регистрируется в ЭВМ 6 [2].
Рис. 5. Функциональная схема экспериментальной установки:
1 – пруток, 2 – излучающий ЭМАП, 3 – приемный ПЭП, 4 – генератор электрических импульсов, 5 – усилитель, 6 – ЭВМ.
Эхограмма зарегистрированного сигнала и ее спектры для различных преобразователей (ø12мм, ø14мм и ø18мм) представлены на рис. 6.
Результаты эксперимента приведены в табл. 1, показаны значения отношения шум-сигнал в процентах для модели при частоте 20 кГц и для снятых эхограмм, прутков с переменным сечением, тремя преобразователями разного диаметра.
479
|
а) |
|
|
|
б) |
|
|
Рис. 6. Эхограмма (а) и спектр зарегистрированных сигналов (б) |
|||||
Таблица 1. Характеристики сигнала и его спектра |
|
|
|
|||
|
|
|
|
|
|
|
|
Параметр |
Модель |
|
ø18 |
ø14 |
ø12 |
|
Отношение шум-сигнал, % |
0,99 |
|
0,82 |
0,80 |
1,25 |
|
Основная частота, кГц |
20 |
|
20 |
20 |
20 |
|
Ширина спектра (на поло- |
|
|
24 |
30 |
21,2 |
|
вине максимума), кГц |
|
|
|||
|
|
|
|
|
|
|
|
Середина спектра, кГц |
|
|
23,8 |
26,1 |
26,4 |
Таким образом, существенное изменение спектра ЗИ в эксперименте с использованием разных преобразователей не выявлено. Изменение частоты зондирующего импульса получено на преобразователе ø18мм, при изменении расстояние (L) излучателя до торца прутка (рис. 7, а). Параметры и вид спектра сигнала приведены на рис. 7, б и в табл. 2.
а) |
б) |
Рис. 7. Схема расположения излучателя ‒ И и приемника ‒ П (а) и спектр зарегистрированных сигналов (б)
Таблица 2. Сравнение результатов
Расстояние L, мм |
40 |
60 |
80 |
100 |
|
Амплитуда первого отраженного |
244 |
218 |
205 |
172 |
|
импульса, мВ |
|||||
|
|
|
|
||
Амплитуда шума, мВ |
1,99 |
1,61 |
1,17 |
0,59 |
|
Отношение шум-сигнал, % |
0,82 |
0,73 |
0,57 |
0,35 |
|
Основная частота спектра, кГц |
20 |
20 |
20 |
20 |
|
Ширина спектра (на половине |
24,2 |
18,6 |
16,8 |
15,2 |
|
максимума), кГц |
|||||
|
|
|
|
||
Середина спектра, кГц |
22,5 |
19,1 |
17,8 |
15,6 |
480
Из результатов эксперимента видно, что при отдалении излучателя от приемника на расстояние 100 мм, происходит смещении спектра ЗИ в низкочастотную область, что приводит к уменьшению уровня акустического шума.
При распространении акустических импульсов в прутке с переменным сечением возникает рост амплитуды мешающего шума. Причиной аномально высокого уровня акустического шума является интерференция волн от перепадов сечения с регулярным шагом. Шум имеет периодический характер. При изменении частоты зондирующего импульса, меняется уровень шума. Увеличивая расстояние излучающей катушки от торца прутка, тем самым изменяя частоту зондирующего импульса, наблюдаем уменьшение уровня акустического шума, не превышающего критерий браковки 0,5 %.
Работа выполнена при поддержке:
‒ Программы стратегического развития Ижевского государственного технического университета имени М. Т. Калашникова на 2012‒2016 годы
(ПСР/М2/Н2.5/МВВ).
Список литературы
1.Штанги насосные и муфты к ним. Технические условия [Текст]:ГОСТ 13877-96. – Минск: ИПК Издательство стандартов, 1999.
2.Буденков, Г.А. Использование волн в стержнях для решения некоторых задач акустического контроля и диагностики [Текст]/ Г.А. Буденков [и др.] //Тезисы XX Уральской конференции «Контроль технологий, изделий и окружающей среды физическими методами» (22-25 мая, 2001, Екатеринбург).-2001. – С. 102-103.
А. В. Жидяев, магистрант В. А. Мошонкин, инженер кафедры «Радиотехника»
Ижевский государственный технический университет имени М. Т. Калашникова
Оценка параметров нестационарного канала связи по вектору ошибок помехоустойчивого декодера
В настоящее время для эффективной передачи данных по беспроводным каналам связи все чаще используются системы связи с алгоритмами адаптации к состоянию канала связи. Существуют различные способы адаптации системы связи, но большинство из них сводится к оценке характеристик канала связи. В настоящее время наиболее популярны следующие методы оценки канала связи [3]:
1) определение уровня шума (отношения сигнал/шум); 2) зондирование специальными сигналами;
3) определение количества ошибок в передаваемом сообщении;
481
4) введение в сигнал специальных символов для оценки канала связи. Первый метод оценки кроме ОСШ не позволяет оценивать другие па-
раметры канала связи, например задержку между лучами, доплеровский сдвиг или рассеивание. Второй метод позволяет очень точно оценить практически все параметры канала, однако для зондирования требуется прерывать передачу, тем самым значительно снижая скорость передачи и усложняется структура системы связи.
Исследуем алгоритм оценки характеристик канала связи, используя значения синдрома ошибок при декодировании данных. Такой метод оценки с помощью помехоустойчивого кодека не требует использование специальных алгоритмов обработки, так как помехоустойчивый код в настоящее время используется в любой системе связи, использующей для передачи данных беспроводной канал связи. В качестве помехоустойчивого кода будем использовать усеченный код Рида-Соломона (16,2).
При оценке нестационарного беспроводного канала связи будем определять отношение сигнал/шум и частотное рассеивание в канале связи. В качестве модели каналы связи выберем декаметровый канала связи.
По классификации ITU декаметровый канал связи может принимать следующие состояния[4]:
1.) спокойные условия (задержка 0,5 мс; частотное рассеяние 0,1 Гц); 2.) умеренные условия (задержка 1 мс; частотное рассеяние 0,5 Гц); 3.) возмущенные условия (задержка 2 мс; частотное рассеяние 1 Гц);
Отношение сигнал/шум в канале связи можно достаточно точно определить, зная вероятность ошибки на бит или среднее количество ошибочных символов в кодовом слове (для кода Рида-Соломона).
Для определения типа канала воспользуемся следующим алгоритмом. Декаметровый канал связи характеризуется наличием замираний (моментов времени, когда мощность сигнала принимает очень низкие значения). В момент замирания отношение сигнал/шум в канале связи уменьшается, и количество ошибочных символов возрастает, причем частота данного процесса зависит от величины доплеровского рассеивания. На рис. 1 и 2 показан график зависимости количества ошибок в кодовом слове при спокойных условиях и возмущенных условиях распространения сигнала в декаметровом канале связи. Анализ графиков позволяет сделать вывод, что скорость изменения среднего значения количества ошибок в спокойном канале значительно меньше, чем скорость изменения среднего значения количества ошибок в возмущенном канале.
482
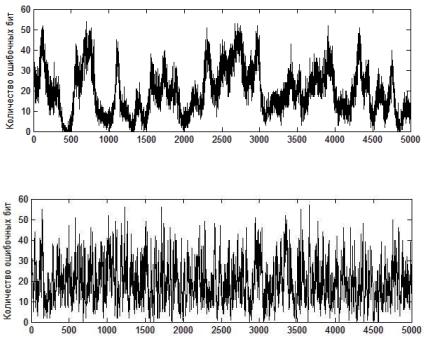
Рис. 1. Зависимость количества ошибок от номера кодового слова при спокойных условиях и отношении сигнал/шум ‒2 дБ.
Рис. 2. Зависимость количества ошибок от номера кодового слова при возмущенных условиях и отношении сигнал/шум ‒ 2 дБ.
Для определения параметров канала был разработан алгоритм, приведенный на рис. 3. Статистикой декодирования является количество ошибок в декодированном кодовом слове Nerr, для оценки канала анализу подвергается N кодовых слов. На начальном этапе производится расчет вероятности ошибки на кодовый символ. Для определения условий в канале выполняется следующие действия:
1)берется модуль от дискретного преобразования Фурье набранного массива статистики;
2)усредняются первые n1 отсчетов;
3)усредняются отсчеты в промежутке от n2 до n3;
4)находится число b равное отношению чисел полученных в пунктах 1 и 2;
5)на основе табл. 1 принимается значение об условиях в канале.
Таблица 1. Условия для оценки условий в канале
Значения числа b |
Условия в канале |
b < 1 |
Канал с АБГШ |
1 < b < 2,5 |
Возмущенные условия |
2,5 < b < 5 |
Умеренные условия |
b > 5 |
Спокойные условия |
483
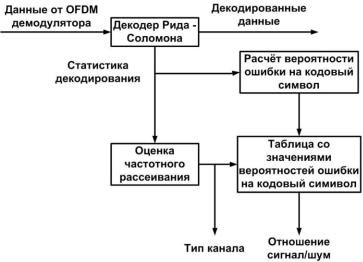
Значения n1, n2, n3, а также пороги 1; 2,5; 5 получены экспериментально.
Рис.3. Схема алгоритма
Предложенный алгоритм позволяет достаточно точно определять условия распространение сигнала в беспроводном канале связи, что позволяет проводить адаптацию системы связи к текущему состоянию нестационарного канала.
Работа выполнена в рамках Программы стратегического развития ФГБОУ ВПО «ИжГТУ имени М.Т. Калашникова» на 2012–2016 гг.
Список литературы
1.Морелос-Сарагоса, Р. Искусство помехоустойчивого кодирования. Методы, алгоритмы, применение [Текст] /Р.Морелос-Сарагоса.- М.: Техносфера, 2005.-
320с.
2.Сергиенко, А.Б. Цифровая обработка сигналов [Текст] /А.Б. Сергиенко -
СПб.: Питер, 2002.-608с.
3.Головин, О.В. Системы и устройства коротковолновой радиосвязи [Текст] / О. В. Головин, С.П. Простое- М.: Горячая линия. – Телеком, 2006.-598с.
4.Recommendation ITU-R F.1487. Testing of HF modems with bandwidths of up to about 12 kHz using ionospheric channel simulators.- ITU 2010.- 13с.
484

Г. Н. Жулдыбина, магистрант
Д. В. Злобин, старший преподаватель Ижевский государственный технический университет
имени М. Т. Калашникова
Оптимизация усилительного тракта аппаратуры волноводного акустического контроля линейно-протяженных объектов
Разработанная на кафедре методика контроля длинномерных объектов предполагает использование стержневой волны, импульс которой формируется ЭМА-преобразователем, находящимся на торце объекта (прутка, насосной штанги и т.п.). В качестве приемника традиционно используется пьезопреобразователь (ПЭП) контактного типа. Он обеспечивает высокую амплитуду принятого сигнала, обладает малой чувствительностью к электрическим наводкам, как от зондирующего импульса, так и от внешних электромагнитных шумов. Однако необходимость ровной контактной поверхности, а также большое поглощение энергии переотраженных импульсов снижают диапазон его возможных применений. Перспективным развитием данной методики контроля является использование приемного ЭМА-преобразователя, работающего на эффекте линейной магнитострикции. Отличительными особенностями ЭМА приема являются меньшая эффективность преобразования, и большая восприимчивость к внешним электромагнитным воздействиям, что приводит к снижению отношения сигнал-шум в принятом сигнале.
Так, например, для прутка диаметром 4 мм, выполненного из стали марки Ст20, амплитуда сигнала с ПЭП составляет 500 мВ, а с ЭМАприемника 11 мВ (рис. 1).
а б Рис. 1. Дефектограммы прутка при использовании пьезоэлектрического (а) и
электромагнитного (б) приемных преобразователей
Вследствие этого, большое значение при разработке методик и аппаратуры контроля длинномерных объектов ЭМА-методом приобретает оптимизация приемного электрического тракта дефектоскопа. Основными ее
485
критериями следует считать минимизацию искажений формы принятого импульса при максимально возможном соотношении сигнал-шум, что требует точной настройки крутизны АЧХ и граничных частот фильтров НЧ и ВЧ, входящих в состав усилительного тракта (рис. 2).
В целях сокращения трудоемкости настройки усилительного тракта был разработан программный продукт, позволяющий моделировать воздействие электрических фильтров различных типов на принятый электрический сигнал.
Алгоритм работы программы (рис. 3) заключается в следующем: исходными данными для обработки является массив значений, содержащий форму принятого импульса во временной области. Данный массив загружается из файла типа «CSV», сохраненного во внутренней памяти цифрового осциллографа. Затем сигнал подвергается Фурье-преобразованию (БПФ). Далее, в программе имеется возможность задания произвольных частотных характеристик, определяющих тип применяемых фильтров (Бесселя, Баттерворта, Чебышева и т.п.), их порядок и граничные частоты. Полученный ранее спектр импульса перемножается с соответствующими АЧХ фильтров. Затем производится обратное преобразование Фурье, в результате которого восстанавливается форма сигнала во временной области, с учетом воздействия АЧХ электрического тракта. Результаты вычислений выводятся в виде графиков, представляющих собой сопоставление исходного сигнала и его формы при воздействии заданных пользователем АЧХ.
|
ГЗИ |
Задающий |
|
|
генератор |
|
|
|
|
|
|
ИК |
ПК |
ОК |
Устройство |
|
|
отображения |
|
|
|
|
Цепь защиты, |
ФНЧ |
ФВЧ |
Выходной |
|
входной каскад |
||||
усилитель |
||||
усилителя |
|
|
||
|
|
|
Рис. 2. Блок-схема акустического дефектоскопа длинномерных объектов: ГЗИ – генератор зондирующих импульсов; ИК – излучающая катушка;
ПК – приемная катушка; ОК – объект контроля; ФНЧ – фильтр нижних частот; ФВЧ – фильтр верхних частот.
486
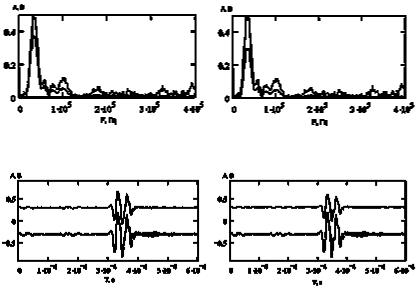
а |
б |
Рис. 4.Сравнение спектров исходного сигнала и прошедшего обработку ФНЧ (а) и ФНЧ+ФВЧ(б) соответственно
а б Рис. 5. Сравнение формы исходного сигнала во временной области и прошедшего
обработку ФНЧ (а) и ФНЧ+ФВЧ (б) соответственно
Таким образом, использование данного программного решения позволяет эффективно моделировать воздействие фильтров с различными параметрами на принятый сигнал, производить оценку степени изменения формы и амплитуды импульса и определять соотношение сигнал - шум на выходе усилительного тракта. Вследствие этого становится возможным значительное сокращение трудозатрат на аппаратное моделирование в процессе разработки приемного тракта, что повышает эффективность труда разработчиков. Перспективами данного направления проектирования может стать развитие возможностей программного продукта. В частности, при дефектоскопии длинномерных объектов с использованием метода многократных отражений появляется возможность моделирования воздействия тракта на серию отраженных импульсов, автоматический подсчет амплитуды каждого импульса, определение коэффициента затухания и коэффициента отражения от дефекта при различных формах АЧХ электрического тракта дефектоскопа.
Работа выполнена при поддержке Программы стратегического развития Ижевского государственного технического университета им. М.Т.Калашникова на 2012‒2016 годы (ПСР/М2/Н2.5/МВВ)
488
Список литературы
1.Волович, Г.И. Схемотехника аналоговых и аналогово-цифровых электронных устройств [Текст] / Г.И. Волович.- М: Издательский Дом «Додэка-XXI», 2005.
–527 с.
2.Охорзин, В.А. Прикладная математика в системе MATHCAD: учеб. пособие [Текст]/В.А. Охорзин. СПб.: Лань, 2009. – 352 с.
П. В. Караваев, магистрант
А. А. Богданов, кандидат технических наук Ижевский государственный технический университет имени М. Т. Калашникова
Широкополосный сигнал с манипуляцией частотных составляющих по фазе
Исследование широкополосных (сложных, шумоподобных) сигналов является актуальным в области информационно-телекоммуникационных технологий в связи с необходимостью повышения качества обслуживания и увеличения скорости передачи данных. В настоящее время многоканальные системы с широкополосными сигналами (ШПС) получают все более широкое распространение. Существует большое количество видов ШПС [1]. Однако чаще применяются фазоманипулированные (ФМ) сигналы, что объясняется простотой их формирования и обработки, обеспечения большой базы, высокой стабильности когерентной несущей частоты, а также возможностью быстрой перестройки параметров передающего и приемного оборудования.
ШПС с манипуляцией частотных составляющих по фазе сочетает в себе особенности широкополосного и многочастотного (МЧ) сигнала. При этом общая полоса частот делится на некоторое (равное числу поднесущих) количество широкополосных элементов (ШПЭ) с последующей их стыковкой. Общий спектр сигнала имеет более равномерную форму, чем спектр ШПС с одной поднесущей.
Рассмотрим по отдельности те элементы, которые необходимы для построения модели широкополосного сигнала с манипуляцией частотных составляющих по фазе: псевдослучайные последовательности (ПСП), используемые для фазовой манипуляции, и многочастотные сигналы.
В качестве ПСП используем последовательности Лежандра, образующие достаточно мощный класс бинарных кодов с минимаксной периодической АКФ [2]. Условие их существования (любая простая длина вида N=4l+3, l – целое число) значительно мягче, чем у М- последовательностей (N=2k-1, k – целое число), благодаря чему последовательности Лежандра более доступны по сравнению с М- последовательностями. Например, на интервале длин от 50 до 1500 М-
489



 N
N

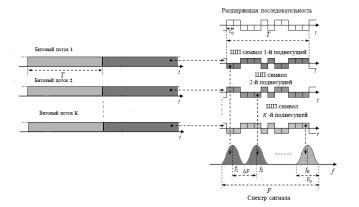
ются усложнение аппаратуры систем, использующих ШПС, особенно приемной части, более высокие требования к быстродействию сигнального процессора и быстродействию алгоритмов обработки сигнала.
В дальнейшем предполагается промоделировать в MATLAB передачу
ШПС с манипуляцией частотных составляющих по фазе по стационар-
ному многолучевому KB каналу с Гауссовым рассеянием; сравнить полученные зависимости вероятности ошибки от отношения сигнал/шум при различных временных задержках и доплеровских сдвигах с простым ФМШПС.
Работа выполнена в рамках Программы стратегического развития ФГБОУ ВПО «ИжГТУ имени М.Т. Калашникова» на 2012-2016гг.
Список литературы
1. Варакин, Л. Е. Системы связи с шумоподобными сигналами [Текст]/Л.Е. Варакин – М.: Радио и связь, 1985. – 384 с.
2.Ипатов, В. П. Широкополосные системы и кодовое разделение сигналов. Принципы и приложения [Текст]/ В.П. Ипатов.– М.: Техносфера, 2007. – 488 с.
3.Гантмахер, В.Е. Шумоподобные сигналы. Анализ, синтез, обработка [Текст]/ В. Е. Гантмахер, Н. Е. Быстров, Д. В. Чеботарев.- СПб.: Наука и Техника,
2005. – 400 с.
4.Весоловский, К. Системы подвижной радиосвязи [Текст]/ К. Весловский; под ред. А. И. Ледовского. – М.: Горячая линия – Телеком, 2006. – 536 с.
И. А. Казанцев, студент
А. И. Нистюк, доктор технических наук, профессор Ижевский государственный технический университет имени М. Т. Калашникова
Перспективы квантовых компьютеров
В данной статье сделана попытка определить перспективные пути развития наноэлектроники и методы исследования наноструктур, применительно к обработке и передаче информации.
Как показано в работе [1], сектор электроники и информационных технологий на рынке нанопродуктов к 2014 году будет составлять $1,8 млрд. Рынок определяется широкими перспективами их практического применения при создании новых веществ с заданными механическими, электрическими, магнитными и оптическими свойствами, и качественно новыми микро- и наноэлектронными приборами на их основе.
Известно, что характеристики наноматериала в значительной мере зависят от свойств составляющих материал частиц, т.е. их величины, морфологии и так далее. Малые атомные агрегации (кластеры) являются промежуточным звеном между изолированными атомами и молекулами, с
493
одной стороны, и объемным твердым телом, с другой стороны. Переход от дискретного электронного энергетического спектра, свойственного отдельным атомам и молекулам, к зонному электронному энергетическому спектру, характерному для твердого тела, происходит именно через кластеры.
Наиболее актуальным является создание эффективного источника излучения на базе кремния. Кремний является непрямозонным материалом, в связи с чем эффективность межзонной излучательной рекомбинации в нем низка по сравнению с безызлучательной. В настоящее время светоизлучающие оптоэлектронные приборы (светодиоды, полупроводниковые лазеры) изготавливаются на основе прямозонных полупроводниковых соединений. Квантовый выход излучения инжекционных лазеров на основе гетероструктур достигает 80%. Однако прямое наблюдение структурных и фазовых превращений в свободных нанокластерах и островковых пленках на твердых поверхностях крайне затруднительно. В этом плане применение методов компьютерного моделирования представляется перспективным на ближайшее время [2].
Таким образом, используя методику, изложенную в [3], можно констатировать, что будут развиваться несколько направлений исследований, а именно:
1.Замена металлических межэлементных соединений в интегральных схемах на оптоэлектронные с использованием диэлектрических, полупроводниковых или гибридных волноводов.
2.Обработка распространяющихся по волноводам оптических сигналов средствами оптоэлектроники.
3.Использование оптического излучения в диапазоне λ = 1,3-1,55 мкм, поскольку это значение совпадает с минимумом спектральной зависимости потерь в кварцевом оптоволокне.
4.Разработка методов компьютерного молекулярно-динамического моделирования.
Список литературы
1.Азоев, Г.Л. Маркетинговый анализ рынков нанопродуктов (результаты аналитического проекта) [Текст]/ Г.Л. Азоев // Маркетинг.-2009. - № 5.
2.Самсонов, В.М. Молекулярно-динамическое моделирование процессов формирования наноразмерных гетероструктур на твердых поверхностях [Текст]/ В.М. Самсонов, А.Г. Бембель, Д.Г. Зыков Д.Г.// Материалы Международной научнотехнической конференции INTERMATIC , 2012.– С. 99-103.
3.Нистюк, А.И. Управление по целям [Текст]/А.И. Нистюк // Приборостроение в XXI веке. Интеграция науки, образования и производства:сб. науч. работ. – Ижевск: Изд-во ИжГТУ, 2008. – С. 125-129.
494
Козлов А. С., магистрант М. А. Бояршинов, кандидат технических наук, доцент
Ижевский государственный технический университет имени М. Т. Калашникова
Разработка портативного радиомодуля УВЧ диапазона
При разработке устройств и систем самого различного назначения возникает задача обеспечения бесшнурового доступа к мобильному терминалу, удаленному от основного устройства на расстояния от десятка метров до нескольких километров. Как правило, для таких задач исполь-
зуется так называемые ISM (Industrial, Scientific and Medical, Промыш-
ленные, Научные и Медицинские) частоты УВЧ диапазона, не требующие регистрации устройств, при ограниченной мощности передатчика.
Модули радиоканала обеспечивающие бесшнуровой доступ пультов управления и радиогарнитур к основной радиостанции, в настоящее время используются и в системах специального назначения. Их применение позволяет избежать обнаружения, а в специальных системах – уничтожения, за счет удаленного расположения от радиостанции. Кроме того, резко повышается мобильность терминала, который может использоваться не только радистом, но и руководителем группы.
Указанные условия применения, требуют решений обеспечивающих требуемую дальность и устойчивость связи, при низком энергопотреблении, особенно при автономной работе. Поэтому, возникла цель спроектировать модуль радиоканала, который мог бы обеспечить канал связи, при различных условиях распространения сигнала связи.
Рассмотрим два существующих варианта построения высокочастотной части устройства. Можно использовать готовый радиомодуль, либо разработать приемопередающее устройство, используя высокочастотную микросхему трансивера, кварцевый резонатор и необходимые дискретные элементы. В табл. 1 приведены преимущества и недостатки обоих способов построения высокочастотной части устройства.
Учитывая то, что самостоятельная разработка приемопередающего устройства позволяет построить беспроводную часть наилучшим образом с учетом всех требований, представленных выше, было решено выбрать данный вариант.
Для определения необходимой выходной мощности передатчика, произведен расчет, для рабочих частот 433 МГц и 868 МГц. Использование данных частот обусловлено тем, что для подключения приемопередатчиков работающих на данных частотах, требуется достаточно мало внешних элементов, стоимость которых к тому же невелика, а значит, снижается и стоимость конечного результата. С ростом рабочей частоты сложность проектирования и эксплуатационного обслуживания устройств растет.
495

Таблица 1. Преимущества и недостатки различных способов построения вы-
сокочастотной части устройства
Варианты |
|
Преимущества |
|
Недостатки |
|
||||||
решения |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Готовый радиоча- |
− |
Минимальное |
время |
− Характеристики |
|
||||||
стотный модуль |
проектирования; |
|
|
могут не точно |
|
соот- |
|||||
|
− |
низкие |
затраты |
на |
ветствовать требуемым; |
||||||
|
оценку и тестирование; |
− единственный |
произ- |
||||||||
|
− |
гарантированное |
ка- |
водитель; |
|
|
|
|
|||
|
чество, проверенное вре- |
− невозможно |
|
вносить |
|||||||
|
менем и большим объе- |
изменения; |
|
|
|
||||||
|
мом выпуска; |
|
|
|
более дорогое |
|
реше- |
||||
|
упрощенная |
логистика |
ние. |
|
|
|
|
||||
|
компонентов. |
|
|
|
|
|
|
|
|
||
ВЧ-часть на дискрет- |
− |
Полный контроль над |
− Выше |
затраты |
на |
||||||
ных компонентах |
характеристиками; |
|
разработку; |
|
|
|
|||||
|
− |
возможность |
вносить |
− требуется |
тестиро- |
||||||
|
изменения; |
|
|
|
|
вание; |
|
|
|
|
|
|
− |
несколько производи- |
сложнее |
логистика |
ком- |
||||||
|
телей комплектующих; |
плектующих. |
|
|
|
||||||
|
экономия |
на |
стоимости |
|
|
|
|
|
|||
|
комплектующих; |
|
|
|
|
|
|
|
|||
Так как дальность радиосвязи r небольшая, в основу расчета линии радиосвязи можно положить следующую формулу [1]:
P D |
D |
P 20lg4πr 20lgλ F , |
(1) |
|
1 |
1 |
2 |
2 |
|
где: P1 ‒ мощность передатчика, дБ,Вт; P2 ‒ чувствительность приемника, дБ,Вт; D1 ‒ коэффициент усиления передающей антенны, дБ; D2 ‒ коэффициент усиления приемной антенны, дБ; r ‒ расстояние, м; ‒ длина волны, м; F ‒ множитель ослабления, дБ.
При расчетах считали, что коэффициенты усиления у применяемых антенн будут:
1)для 433 МГц, коэффициент усиления 2 дБи;
2)для 868 МГц, коэффициент усиления 2,14 дБи.
Длина волны для рабочих диапазонов имеет следующее значение:
1)69,3 см, для частоты 433 МГц;
2)34,6 см, для частоты 868 МГц.
Поляризация выбрана вертикальная, так как это более удобно в использовании. Необходимое расстояние ‒ 150 метров.
Множитель ослабления F включает в себя интерференционные потери F1, обусловленные влиянием земли и потери энергии при распространении сквозь листву деревьев: F (дБ) = F1 (дБ) + (дБ).
496

Таблица 2. |
Параметры проектируемых радиолиний |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
Мощ- |
Мощ- |
|
|
|
Поте- |
|
Диапа- |
|
ность |
ность |
Чувстви- |
|
|
ри, |
|
Дли |
пере- |
пере- |
|
|
вно- |
|||
зон |
тель- |
Потери |
Интерфе- |
|||||
на |
датчика |
датчика |
симые |
|||||
рабо- |
ность |
распро- |
ренционное |
|||||
вол |
с уче- |
без |
лист- |
|||||
чих |
прием- |
стране- |
затухание, |
|||||
ны, |
том |
учета |
вой1, |
|||||
частот, |
м |
листвы, |
листвы, |
ника, |
ния, дБ |
дБ |
дБ |
|
МГц |
дБ,Вт |
|
|
|||||
|
дБ,Вт |
дБ,Вт |
|
|
( 0*15 |
|||
|
|
|
|
|
||||
|
|
(мВт) |
(мВт) |
|
|
|
0м) |
|
433 |
0,69 |
‒19,6 |
‒38,1 |
‒150 |
71,7 |
(‒)39,9 |
(‒)18,5 |
|
(11) |
(0,16) |
|||||||
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
868 |
0,35 |
‒10,2 |
‒36,3 |
‒150 |
75,9 |
(‒)42,3 |
(‒)26,1 |
|
(94) |
(0,25) |
|||||||
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
В этом случае никаких дополнительных элементов не требуется и такое подключение может быть осуществлено напрямую. Необходимо лишь учитывать уровни логических сигналов на соответствующих линиях беспроводного модуля и микроконтроллера, которые должны быть одинаковыми.
Рис.1. Подключение типового беспроводного модуля к микроконтроллеру устройства
Проверочные результаты показывают, что модуль радиоканала, разрабатываемый на основе выбранного трансивера SX1231H, компании Semtech, способен обеспечить стабильный канал связи на расстоянии 150 метров, при выходной скорости передачи данных до 300кбит/с.
Работа выполнена в рамках Программы стратегического развития ФГБОУ ВПО «ИжГТУ имени М.Т. Калашникова» на 2012-2016гг.
498
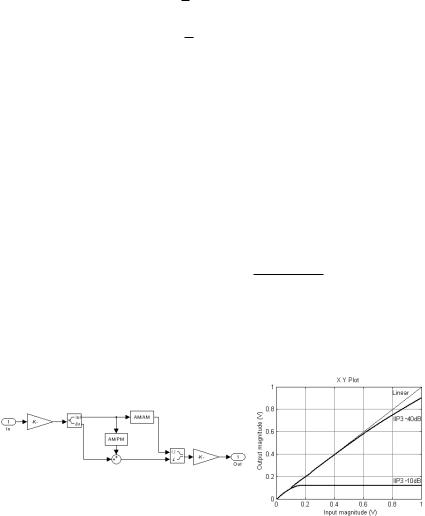
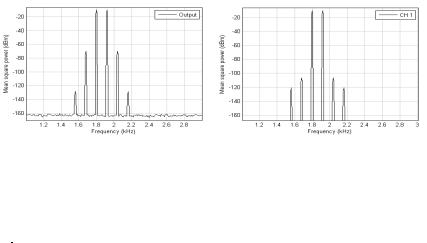
Искажения фазы сигнала в модели достигается с помощью преобразования текущего значения усиления (в дБ) в радианы.
Величина вносимых искажений в модели представлена параметром IIP3. Он характеризует уровень продуктов интермодуляции. На рисунке 3б представлены передаточные характеристики модели усилителя для различных значений IIP3. С ростом величины интермодуляционных искажений, амплитудная характеристика менее линейна.
Для моделирования работы системы линеаризации применялся двухтональный сигнал с частотами ω1=1800 Гц, ω2=1920 Гц.
Результат работы схемы линеаризации при величине интермодуляционных искажений ‒20 дБ представлен на рис. 4. В табл. 1 занесены результаты моделирования для различных уровней интермодуляционных искажений.
а) б)
Рис. 4. а) Спектр сигнала на выходе усилителя мощности без схемы линеаризации; б) спектр сигнала на выходе усилителя мощности со схемой линеаризации.
Таблица 1. Результаты работы схемы линеаризации при различных уровнях
интермодуляционных искажений для модели гиперболического тангенса
|
|
Усиление 0 дБ |
Усиление 10 дБ |
Усиление 40 дБ |
||||
|
|
Без кор- |
С кор- |
Без кор- |
С коррек- |
Без кор- |
С коррек- |
|
|
|
рекции, |
рекцией, |
рекции, |
рекции, |
|||
|
|
цией, (дБ) |
цией, (дБ) |
|||||
|
|
(дБ) |
(дБ) |
(дБ) |
(дБ) |
|||
|
|
|
|
|||||
Уровень |
иска- |
‒50 |
‒75 |
‒40 |
‒64 |
‒10 |
‒45 |
|
жений ‒ 10 дБ |
||||||||
|
|
|
|
|
|
|||
Результат |
|
Подавление 25 дБ |
Подавление 24 дБ |
Подавление 35 дБ |
||||
Уровень |
иска- |
‒70 |
‒106 |
‒60 |
‒92 |
‒30 |
‒60 |
|
жений ‒ 20 дБ |
||||||||
|
|
|
|
|
|
|||
Результат |
|
Подавление 36 дБ |
Подавление 32 дБ |
Подавление 30 дБ |
||||
Проведенное математическое моделирование метода линеаризации основанное на декартовой петли обратной связи показало:
−возможность линеаризовать усилитель в нужной полосе частот (узком диапазоне спектра);
−управление амплитудой и фазой с помощью разных контуров;
−подстройка под усилитель мощности и некритичность к его смене;
−подавление интермодуляционных искажений до 35 дБ;
502
−уровень подавления интермодуляционных искажений связан с как с нелинейностью усилителя, так и его коэффициентом усиления. С увеличением коэффициента усиления зависимость от нелинейности усилителя падает;
−основным недостатком является неустойчивость и необходимостью подстройки амплитуды и фазы сигнала.
Работа выполнена в рамках Программы стратегического развития ФГБОУ ВПО «ИжГТУ имени М.Т. Калашникова» на 2012-2016гг.
Список литературы
1.Pedro, An. MMIC Linearized Amplifier using Active Feedback [Текст] / J. Pedro, J. Perez // IEEE MTT-S, Atlanta, Georgia, vol. 1, June 1993.-P. 95-98.
2.Kenington, P. B. Linearized RF Transmitter Techniques [Текст] / P. B. Kenington
//IEEE MTT-S International Microwave Symposium, Tutorial Session on Advances in Amplifier Linearization,1998.- Baltimore, MD.
3.Kim, S.W. Design of a Predistorter Controlling Individual Orders of Intermodulation Using a New Harmonic Generator [Текст] / S. W. Kim, H. Y. Cho, Y. Kim, I. S. Chang // Microwave Journal, 2003.
4.Shi, B. A 200-MHz IF BiCMOS Signal Component Separator for Linear LINC Transmitters [Текст] / B. Shi, L. Sundstroem // IEEE Journal of Solid-State Circuits. - 2000.-vol. 35.- no. 7.
5.Miehle, K. A new linearization method for cancellation of third order distortion [Текст] / K. Miehle.- 2003.
6.Никифоров, Б.В. Методы уменьшения нелинейных искажений сигналов в радиопередающих трактах [Текст] / Никифоров Б.В., Лисицкий А.Б. // Полупроводниковая электроника в технике связи: сб.- № 28.
А. В. Корякин, аспирант Ижевский государственный технический университет
имени М. Т. Калашникова
Применение нейросетей для распознавания сигналов
впериметровых акустических охранных системах
Внастоящее время нейросети успешно применяются в задачах распознавания образов. В этой работе показана возможность применение нейронных сетей для определения типа нарушителя в периметровых охранных системах, чувствительными элементами которых являются микрофоны.
В[1] были описаны параметры акустического сигнала, по которым можно определять вторжение и различать тип нарушителя (автомобиль, человек). Этими характеристиками являются коэффициент эксцесса сигнала и спектр сигнала.
503
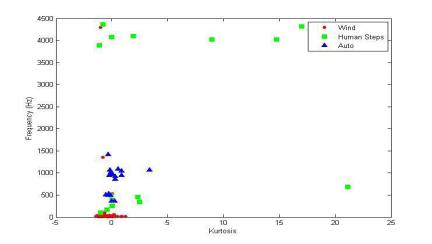
Применение в данной задаче нейросетей обусловлено их способностью к обучению, то есть реальную систему можно будет настроить (обучить) при установке на охраняемом объекте. Системы распознавания требуют гибкой настройки в зависимости от типа грунта, времени года, шумов, присутствующих на данном объекте; параметры системы (уровни срабатывания) будут различными. Для настройки системы достаточно будет хорошей обучающей выборки. Использование в системе общих алгоритмов не даст такой гибкости, и алгоритмы будут довольно сложными при большом числе параметров. Однако производительность (скорость работы) нейросетей по сравнению с общими алгоритмами еще требует проверки.
Вычисления были проведены в среде MatLab [2]. Для имитационного моделирования системы и был использован пакет Simulink, а для создания нейросетей пакет NeuralNetwork toolbox.
Сбор данных для обучения. Для получения данных был использован прототип охранной системы (ноутбук + микрофон). Записывался звук проезжающей машины, проходящего человека и посторонних шумов (ветер). Дорожное покрытие – асфальт. Более подробная информация приведена в [1].
Рис. 1. Обучающая выборка
Из предыдущих исследований ясно, что шаги человека характеризуются большими значениями коэффициента эксцесса (больше 8) и высокой частотой (4‒5 кГц), автомобиль частотой (1 кГц) и меньшими значениями эксцесса, ветер низкими значениями и эксцесса и частоты. В соответствии с этим была определена обучающая выборка, показанная на рис. 1. Дискретизация сигнала, расчет коэффициента эксцесса, значимой частоты сигнала, выбор окна описаны в [1].
504
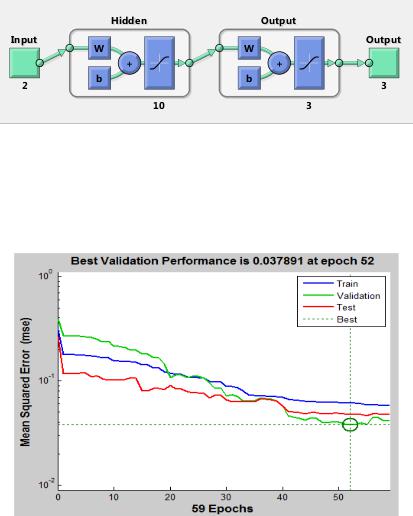
Рис. 2. Строение нейросети
Для задач классификации обычно используют нейронные сети прямого распространения (feedforward). Была использована двухслойная сеть прямого распространения (рис. 2).
Обучение было проведено с помощью обучающей выборки показанной на рис. 1. Поиск весовых коэффициентов проведен методом сопряженных градиентов, продолжительность поиска 59 эпох (рис. 3).
Рис. 3. Производительность сети
Вербализация сети с целью дальнейшего использования в пакете Simulink произведена с помощью команды gensim.
Проверка адекватности обучения. Работа нейросети на большей выборке экспериментальных данных показана на рис. 4.
В аудио файл записан сигнал проходящего человека (3,3 секунды), автомобиля (следующие 3,3 секунды) и ветра. Всего длительность 10 с (рис. 4(г)). На рис. 4(а) значение 1 соответствует определению вторжения автомобиля, на рис. 4(б) – человека и на рис. 4(в) нет вторжения – шум
505
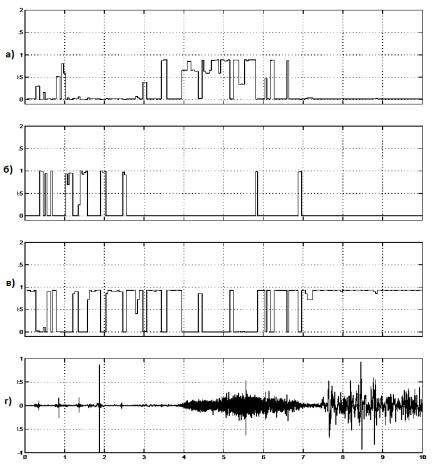
(ветер). Видно, что автомобиль и шаги человека распознаются верно и на расширенной выборке входных данных.
Для решения поставленной задачи распознавания можно использовать нейронные сети. Применение нейросетей дает необходимую гибкость настройки системы, при использовании ее в различных условиях (различное дорожное покрытие, погодные условия и т. д.).
Рис. 4. Результаты тестирования нейросети
Список литературы
1. Корякин, А.В. Алгоритм определение тревоги в периметровых акустических охранных системах на основе коэффициента эксцесса [Текст]/А.В. Корякин //
506

метод весьма плохо реализован аппаратными средствами, большинство из которых являются устаревшими приборами. Актуальным вопросом остается модернизация таких приборов, повышая при этом: универсальность использования прибора, точность, мобильность устройства.
Суть метода автоциркуляции импульсов заключается в том, что прошедший по образцу ультразвуковой импульс преобразуется в приемном преобразователе в электрический импульс, формирующий следующий посылаемый в образец зондирующий сигнал. При этом частота импульсов автоциркуляции зависит от времени пробега импульсом расстояния между пьезопреобразователями, а значит (при неизменном расстоянии между ними) ‒ от скорости распространения ультразвуковой волны в образце.
Рассмотрим подробно один из вариантов построения автоциркуляционного прибора (рис. 1). Генератор запускающих импульсов ГЗИ подает импульсы на вход импульсного усилителя Ус1, с выхода которого они поступают на излучающий пьезопреобразователь В1. Акустический сигнал принимается датчиком B2, с которого поступает на вход широкополосного усилителя Ус2. Сигнал на выходе Ус2 представляет собой затухающие высокочастотные колебания, из этого сигнала формирователь импульсов ФИ1 вырабатывает короткие импульсы, используемые для запуска ФИ2. Задача блока ФИ2 – формирование прямоугольных импульсов длительностью, несколько большей половины периода следования, чем устраняется опасность возникновения колебаний на кратных частотах. С выхода ФИ2 сигнал подается на вход импульсного усилителя Ус1, тем самым цепь автоциркуляции замыкается, после появления устойчивых колебаний генератор ГЗИ отключается выключателем S1. Частота следования импульсов измеряется цифровым частотомером, вход которого подключается к выходу импульсного усилителя. Эта частота будет пропорциональна времени пробега импульса по образцу, а, следовательно ‒ скорости УЗ волны [1].
Рис. 1. Блок схема автоциркуляционного прибора
Целью разработки являлось создание компактного измерителя скорости УЗ колебаний, реализующего метод автоциркуляции. Блок-схема прибора представлена на рис. 2.
510
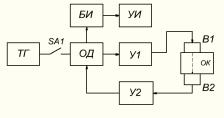
Рис. 2. Блок схема разработанного прибора
Основным узлом, формирующим последовательность сигналов в устройстве, является одновибратор, запускаемый импульсами тактового генератора. Инициированный импульс усиливается выходным усилителем У1, преобразуется датчиком B1 в акустический сигнал, проходит по образцу и принимается преобразователем B2. Далее сигнал усиливается резонансным усилителем У2 с регулируемым коэффициентом усиления, что необходимо для получения устойчивой автогенерации на различных образцах. При превышении принятым сигналом порога срабатывания одновибратора (2,5 В), вырабатывается следующий ЗИ, и процесс циклически повторяется. При возникновении автогенерации тактовые импульсы блокируются выключателем S1. Измерение частоты следования осуществляется цифровым блоком измерения БИ, и отображается на индикаторе.
Аппаратно модули ТГ и ОД реализованы на интегральной микросхеме 74HCT132N, содержащей в своем составе 4 элемента И-НЕ с триггерами Шмитта на всех входах, что позволило значительно уменьшить число составных элементов устройства. Выходной усилитель У1 выполнен по схеме с общим эмиттером, буферизированным эмиттерным повторителем. Входной усилитель У2 – резонансного типа, с настройкой контура на частоту 2,5 МГц, с возможностью регулировки коэффициента усиления в пределах 20‒60 дБ. При использовании одного датчика как на излучение, так и на прием, защита входа У2 от воздействия ЗИ осуществляется цепью ВЧ-диодов, включенных встречно-параллельно.
Измеритель временных интервалов выполнен на базе микроконтроллера (МК) ATTiny 2313. Блок представляет собой плату с установлены контроллером, имеющую порты USB для загрузки и модификации программного обеспечения. Блок схема программы работы контроллера представлена на рис. 3.
Цикл работы программы состоит из следующих основных этапов: инициализация контроллера, в ходе которой указываются начальные значения рабочих переменных, определение числа импульсов, которое используется в рабочем цикле (осуществляется нажатием на соответствующую управляющую клавишу, выбором значений 1, 10, 100). Далее активизируется алгоритм счета числа импульсов, по окончании которого зна-
511
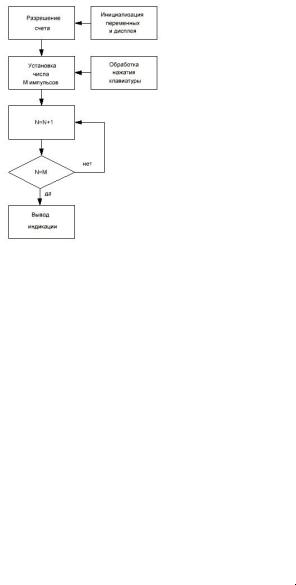
чение времени, соответствующее выбранному их количеству, отображается на однострочном 16-символьном ЖК-дисплее.
Рис. 3. Блок-схема программы
Увеличение числа импульсов в цикле счета приводит к пропорциональному уменьшению относительной погрешности измерения скорости ультразвука. Например, при измерении на стальном образце толщиной 50 мм, погрешность определения скорости при N = 100 составляет порядка 0,3 %, что является весьма высоким показателем.
Конструктивно прибор состоит из плат блока автогенератора, измерения частоты, индикации и источника питания, помещенных в корпус размерами 220×220×70 мм. На передней панели устройства располагаются регулятор коэффициента усиления, кнопки управления запуском и режимами работы контроллера, разъемы подключения преобразователей, контрольные гнезда, а также жидкокристаллический индикатор для отображения результатов измерения. Основные характеристики прибора представлены в таблице
Таблица Основные характеристики прибора
Характеристика |
Значение |
Напряжение питания, В |
220 |
Диапазон измеряемого расстояния, мм |
15‒200 |
Погрешность измерения скорости (N = 100), % |
0,3 |
Потребляемая мощность, Вт |
15 |
Масса, кг |
Не более 0,5 |
Примеры контрольных сигналов с выхода усилителя У2 и одновибратора в режиме установившейся автоциркуляции представлены на рис. 4. В эксперименте использовался стальной образец толщиной 80 мм, режим
512

совместного излучения-приема. Данная установка может быть использована в научной деятельности (точное измерение скорости УЗ-колебаний), лабораторном практикуме, а также в области неразрушающего контроля в качестве толщиномера.
Рис. 4. Контрольные сигналы с выхода У2 и ОД в режиме автоциркуляции
Дальнейшее совершенствование устройства возможно по следующим направлениям – повышение компактности, введение автономного питания, совершенствование характеристик аналогового тракта. Также функциональность прибора может быть улучшена путем осуществления процесса запуска автогенерации и контроля за его поддержанием с помощью возможностей микроконтроллера.
Работа выполнена при поддержке Программы стратегического развития Ижевского государственного технического университета им. М.Т.Калашникова на 2012‒2016 годы (ПСР/М2/Н2.5/МВВ).
Список литературы
1.Муравьев, В.В. Скорость звука и структура сталей и сплавов [Текст]/ В.В. Муравьев, Л.Б. Зуев, К.Л. Комаров.- Новосибирск: Наука. Сибирская издательская фирма РАН, 1996. – 184 с.
2.Евстифеев, А.В. Микроконтроллеры AVR семейства Tiny: руководство пользователя [Текст]/ А.В. Евстифеев А.В..- М.: Издательский дом «Додэка-ХХI»,
2007. – 432 с.
513
Ю. В. Кружалова, студент
А. И. Нистюк, доктор технических наук, профессор Ижевский государственный технический университет имени М. Т. Калашникова
Концепция звукового музыкального блокнота
В данной статье рассматривается концепция звукового блокнота, который способен записывать, воспроизводить, а также преобразовывать звук в ноты ‒ графическое обозначение звука музыкального произведения.
Задача распознавания музыкальных звуков на сегодняшний день является актуальной проблемой. Большинство современных методов, используемых для ее решения, требуют больших вычислительных ресурсов. Невозможность широкого применения многих алгоритмов сегодня, например, в мобильных устройствах заставляет исследователей искать эффективные методы. Для этого необходимо сформулировать основные требования к подобным устройствам. Данное исследование является актуальным в области музыки, так как может использоваться для быстрого создания музыкального произведения. Применение устройств автоматического распознавания особенно актуально для создания музыкальных произведений в нотной записи, идентификации музыкальных произведений, выявление заимствования (плагиат) и др.
Реализация систем распознавания сложна по той причине, что звуковые сигналы сильно зависят от громкости, акустических свойств окружающей среды. Существует целое множество различных факторов, которые могут оказывать негативное влияние на точность распознающей системы
– шум окружающей среды, скорость «напевания», интонация и т. д.
Для распознавания музыки используются алгоритмы, основанные на математических методах.
Для осуществления обработки требуется аналоговый сигнал перевести в цифровой сигнал. Цифровая система обработки звукового сигнала предполагает представление аналогового речевого сигнала в цифровом виде. В результате аналого-цифрового преобразования (АЦП) непрерывный сигнал переводится в ряд дискретных временных отсчетов, каждый из которых представляет собой число. Точность представления зависит от ширины диапазона получаемых чисел, а, следовательно, от разрядности АЦП. Процесс извлечения из сигнала численных значений называется квантованием. Процесс разбиения сигнала на отсчеты – дискретизацией. Число отсчетов в секунду называется частотой дискретизации.
Для извлечения информации обычно используют фильтры тоновых частот (мел-скейл фильтры), которые усредняют спектральные составляющие в определенных диапазонах частот, тем самым делая сигнал менее зависимым от диктора. Такие фильтры являются основой технологии
514
MFCC (Mel-Frequency Cepstral Coefficients), которая используется в рас-
познающей системе.
Еще один метод основан на векторе признаков. Происходит так называемая реализация слова, т. е. цифровая запись произнесения слова (звука) в виде последовательности отсчетов звукового сигнала. Реализация слова (звука) в процессе цифровой обработки разбивается на последовательность кадров. Кадром считается последовательность отсчетов звукового сигнала. Длина кадра фиксирована во времени. Каждому кадру сопоставляются некоторые данные, характеризующие звук наилучшим образом. Такие данные формируют вектор свойств (или вектор признаков). С математической точки зрения это может быть как вектор из пространства , так и набор функций или одна функция. Задачей системы будет являться отождествление каждого слова, поступающего на вход, с заранее определенным классом.
В последнее время распространение получают алгоритмы, использующие нейронные сети. За счет своей простоты и небольшого количества операций на каждой итерации алгоритм стохастической аппроксимации (РАСА) может быть использован для распознавания речи в реальном времени. Алгоритм основан на использовании пробных одновременных возмущений, которые являются искусственными воздействиями с заранее определенными статистическими свойствами, обеспечивающими состоятельность оценок алгоритма при почти произвольных помехах. В случае зашумленных измерений функции потерь алгоритм сохраняет состоятельность доставляемых оценок при почти произвольных помехах. В задаче распознавания отдельных музыкальных звуков такими помехами могут являться фазовые и спектральные сдвиги звукового сигнала, шум окружающей среды, настройки записывающего устройства и т.д. Алгоритм достаточно прост для реализации в виде электронного устройства.
Наилучшей, с нашей точки зрения, является программа WIDI Recognition System (одна из интерпретаций этого названия ‒ Wave to mIDI), поэтапно анализирующая музыкальную композицию и превращающая звуки в ноты. Нота (лат. «знак», «метка») в музыке ‒ это графическое обозначение звука музыкального произведения, один из основных символов современной музыкальной нотации. Вариации в изображении ноты, а также сочетания с другими символами позволяют задать такие характеристики обозначаемого нотой звука, как высоту, длительность и порядок исполнения по отношению к другим звукам [1].
Чтобы получить в конечном варианте ноты, можно использовать различные источники звука. Это может быть звуковой файл, либо сигнал с внешнего источника ‒ магнитофона, микрофона, иного источника звука. В программе есть собственный звукозаписывающий модуль, который обеспечивает запись звука от внешнего источника. Он обеспечивает как монофоническую, так и стереофоническую запись. Распознавание записи проводится в два этапа. На первом вычисляются спектральные данные
515

специального вида ‒ в программе этот этап называется преобразованием «Звук-в-Тон». Для этого распознавания используются несколько различных алгоритмов. Какой из них подходит для выбранного произведения, лучше всего определить методом пробы. Кроме распознавания музыки из файла, программа распознает музыку в реальном времени. Это означает, что можно играть или петь перед микрофоном, а программа будет в это же время распознавать и преобразовывать звуки в формат MIDI.
В состав программы включен специализированный редактор TrueTone для MIDI. Его уникальное отличие от других подобных редакторов заключается в том, что в окне редактирования одновременно отображаются как спектрограмма исходного произведения, так и распознанные ноты. Ноты накладываются на спектрограмму и позволяют визуально сличать их. Для удобства редактор устроен по принципу Piano Roll, когда ноты располагаются на фоне нотного стана. Эти особенности позволяют редактировать распознанные записи даже тем людям, у которых отсутствует большой опыт работы с музыкой.
Редактор позволяет выполнять над нотами различные действия. Он позволяет «склеивать» ошибочно разделенные при распознавании ноты, проигрывать видимый фрагмент файла, сохранять промежуточные результаты в файл специального формата, содержащий как ноты, так и спектрограмму. Возможно проигрывание фрагмента как с нормальной, так и с замедленной скоростью, а также синхронное проигрывание фрагмента и исходного файла. Ноты можно добавлять и стирать, изменять их высоту и длительность, назначать для исполнения любой выбранной ноты тот или иной инструмент [2].
Таким образом, во-первых, алгоритмы обработки звуковых сигналов проходят по одной схеме «аналоговый сигнал ‒ преобразование в цифровой сигнал ‒ обработка ‒ нотная запись ‒ воспроизведение нотной записи». Во-вторых, наиболее перспективными алгоритмами для бытовых устройств, скорее всего, будут алгоритмы, основанные на нейронных сетях. В-третьих, конструктивно подобные устройства должны выглядеть как блокнот со сменными страничками. Микрофон может представлять собой авторучку к блокноту.
Концептуальный вид музыкального блокнота представлен на рисунке.
Рис. Звуковой музыкальный блокнот
516
Предполагается, что звуковой блокнот будет способствовать быстрой записи музыкальных произведений с достаточной достоверностью, что является целью дальнейших исследований.
Список литературы
1.Нота (музыка).- 2013.- (http://ru.wikipedia.org/wiki)
2.Брод, М. Переложим музыку на ноты /М. Брод.- softkey.info: онлайновый журн.-2004.- (http://softkey.info/reviews/review689.php)
3.Takashi, Y.Y. Gadgets portable audio technology. Compose music all high tech like / Y.Y.Takashi.-2008.- (http://www.yankodesign.com/2008/08/18/compose-music- all-high-tech-like)
Я. А. Любезнов, магистрант
В. В. Хворенков, доктор технических наук, профессор Ижевский государственный технический университет имени М. Т. Калашникова
Разработка модернизированной конструкции прибора PKF12-32
Разработка является актуальной в области проектирования микрополосковых СВЧ устройств, в частности, многоканальных широкополосных полосовых фильтров. Цель разработки заключается в улучшении технологичности и упрощении конструктивного исполнения прибора PKF12-32 (далее прибор) при сохранении качества его частотноселективных свойств.
Прибор представляет собой полосовой 12-канальный СВЧ фильтр построенный по микрополосковой технологии. Прибор применяется в СВЧ тракте как устройство первичной частотной селекции принимаемого широкополосного сигнала. Диапазон рабочих частот прибора ‒ от 4 до 10 ГГц. Ширина полосы, выделяемой в одном канале прибора, составляет
500 МГц.
Модернизация прибора состоит в замене подложки с поликора ВК100- 1 на фторопластовую керамику Rogers TMM10i. Данная замена производится с целью увеличения технологичности и снижения трудоемкости изготовления приборов. В связи с заменой подложки необходимо рассчитать новую конструкцию топологии в каналах прибора (типовая топология каналов – параллельно связанные четвертьволновые резонаторы). Затем необходимо построить имитационные модели рассчитанных каналов в программе Microwave Office, смоделировать работу этих каналов и получить амплитудно-частотные характеристики. Ожидаемым результатом будет соответствие АЧХ смоделированных
517
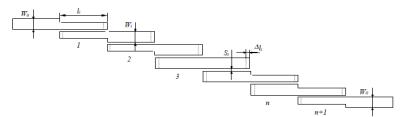
каналов радиотехническим требованиям, указанным в документации на модернизируемый прибор PKF12-32.
На данном этапе работы были выполнены следующие задачи:
1.Расчет топологии первого и четвертого канала прибора PKF12-32M; построение рассчитанной топологии в программе Microwave Office.
2.Исследование амплитудно-частотных характеристик каналов, определение зависимости частотной расстройки от разброса на значение диэлектрической проницаемости подложки. Определение максимального потенциального увеличения длины резонаторов каждого рассчитанного канала во время регулировки.
Выбор исходных данных осуществлялся на основании технических условий, сборочного чертежа и электрической схемы прибора PKF12-32. Для моделирования были выбраны 1-й и 4-й каналы фильтра. Основанием такого выбора послужило их соседнее расположение друг относительно друга в модернизируемом приборе, что максимизирует нежелательное взаимное влияние электромагнитных полей, наводимых в них во время работы.
Топология каждого из каналов фильтра представляет собой структуру на параллельно связанных полуволновых разомкнутых резонаторах с четвертьволновыми электромагнитными связями. Схематическое изображение топологии приведено на рис. 1.
Рис. 1. Схематическое изображение топологии каналов фильтра
В ходе работы методом аналитического расчета получены геометрические размеры топологии[1]. Результаты расчетов сведены в табл. 1.
Таблица 1 Аналитически полученные размеры топологии (в мм)
Геометрические размеры |
1-й канал фильтра |
4-й канал фильтра |
||
топологии |
|
|
||
W1 |
= W6 |
0,516 |
0,543 |
|
W2 |
= W5 |
0,600 |
0,609 |
|
W3 |
= W4 |
0,605 |
0,612 |
|
S1 |
= S6 |
0,232 |
0,298 |
|
S2 |
= S5 |
0,772 |
1,062 |
|
S3 |
= S4 |
0,914 |
1,231 |
|
l1 |
= |
l6 |
6,761 |
4,961 |
l2 |
= |
l5 |
6,727 |
4,935 |
l3 |
= |
l4 |
6,724 |
4,934 |
518
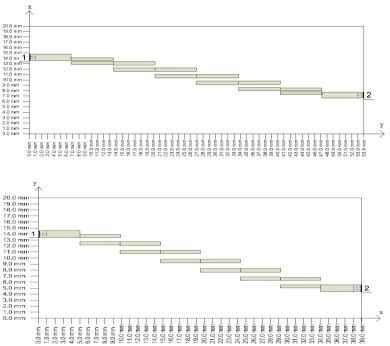
На основе данных расчетов были построены имитационные модели соответствующих каналов фильтра в среде СВЧ моделирования Microwave Office. Структуры моделей в программе показаны на рис. 2 и 3.
Рис. 2. Топология первого канала в программе Microwave Office
Рис. 3. Топология четвертого канала в программе Microwave Office
Отметим, что расчеты и построение топологии в программе производились при характеристиках материала подложки [2], представленных в табл. 2.
Таблица 2. Характеристики материала подложки
|
Относительная |
Тангенс угла |
Высота |
|
Наименование |
диэлектрическая |
диэлектрических |
подложки h, |
|
|
проницаемость ε |
потерь tgδ |
мм |
|
|
|
|
|
|
Rogers |
9,8±0,245 |
0,002 |
0,635 |
|
TMM10i |
||||
|
|
|
Для оптимизации частотно-селективных свойств каналов фильтра были допущены некоторые отклонения от размеров топологии, представленных в табл. 1. Промежуточные графики передаточных характеристик фильтра представлены на рис. 4 и 5.
519
Рис. 4. АЧХ 1-го канала фильтра
Рис. 5. АЧХ 4-го канала фильтра
Планируемым результатом работы являлось получение модели двух каналов прибора PKF12-32M, отвечающей требованиям технической документации на прибор PKF12-32.
Полученные модели каналов удовлетворяют техническим требованиям на прибор PKF12-32, за исключением следующих:
Неравномерности в полосах пропускания обоих рассчитанных каналов оказались чуть больше проектных: 3,38 дБ и 5,34 дБ для первого и четвертого канала соответственно вместо требуемых 3 дБ.
На левой граничной частоте полосы заграждения (4870 МГц) четвертого канала не обеспечивается требуемое затухание 40 дБ.
Результаты, полученные по итогам выполнения данной части магистерской диссертации, позволяют продолжить исследования. Следующим этапом работы после получения АЧХ, удовлетворяющих техническим требованиям, будет создание файлов данных проектирования для платы, на которой будет располагаться микрополосковый тракт. Впоследствии будет создана конструкторская документация на модернизированный прибор, в перспективе планируется создание макета.
520

Существует несколько физических принципов и основанных на них типов магнитометрических приборов, позволяющих фиксировать минимальные изменения ЕГПЗ [1]:
1.квантовые и сверхпроводящие магнитометры;
2.магнито-оптические преобразователи;
3.датчики Холла;
4.феррозондовые приборы.
Основным недостатком приборов первых двух классов является отсутствие осевой направленности чувствительных элементов и, как следствие, невозможность определения пространственной ориентации вектора магнитного поля, создаваемого объектом исследования. Это может повлиять на результат измерения, особенно если требуется точное определение местоположения ферромагнитного объекта. Также общим недостатком квантовых, сверхпроводящих и оптико-механических магнитометров являются их большие габариты, а кроме того низкое быстродействие.
В полевых условиях наиболее широко используются феррозондовые приборы, обладающие не только высокой чувствительностью и стабильностью метрологических характеристик, но и диаграммой направленности, что дает возможность непосредственного измерения составляющих вектора магнитного поля, обеспечивая тем самым получение наиболее полной информации о его структуре и источниках. Феррозондовые магнитометры пригодны для работы со слабыми магнитными полями в широком температурном диапазоне и отличаются высокой надежностью, малым энергопотреблением и невысокой стоимостью. Собственные шумы новейших феррозондовых приборов находятся на уровне порядка 10-12 нТл, т. е. на два порядка ниже, чем, например, у датчиков Холла [1].
Феррозонд является векторно-измерительным датчиком, т.е. выходной сигнал этого чувствительного элемента зависит не только от величины внешнего магнитного поля, но и от его направления относительно оси чувствительности феррозонда [2]. Это свойство феррозонда позволяет использовать его в качестве ориентированного в пространстве устройства относительно силовых линий поля Земли. Однако, для построения поисковой градиентометрической ИИС это свойство является скорее недостатком, потому что, как говорилось выше, поиск ферромагнитных объектов происходит на фоне природного поля Земли, превосходящее на пять порядков приращения поля, вносимого искомыми объектами. Поэтому для решения задачи устранения влияния ориентации должны быть приняты нетривиальные конструктивные, методологические и схемные приемы [3].
На рисунке представлена структура градиентометрической ИИС для обнаружения скрытых ферромагнитных объектов.
Объектом исследования является любой скрытый предмет, обладающий ферромагнитными свойствами. Феррозондовый преобразователь представляет собой два включенных дифференциально и расположенных на одной оси и на определенном расстоянии друг от друга идентичных
522
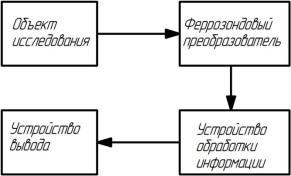
феррозондовых датчика. Каждый из этих датчиков в таком преобразователе называют полузондом. Так как полузонды являются идентичными, поэтому выходной сигнал не зависит от ЕГПЗ, а определяется лишь градиентом внешнего поля.
Рисунок Структура градиентометрической ИИС для обнаружения скрытых ферромагнитных объектов.
Данные с феррозондового преобразователя передаются на устройство обработки информации, где аналоговый сигнал преобразуется в цифровой, а также происходит автоматизированный сбор и хранение измерительной информации. А устройство вывода в свою очередь отображает полученную информацию на дисплее.
Как было определено выше, феррозондовый преобразователь является векторно-измерительным устройством, у которого выходной сигнал зависит от величины и направления магнитного поля. Это позволит ИИС, построенной на его основе получать дополнительную информацию об ориентации и размерах скрытого ферромагнитного объекта, а также оценить глубину его залегания.
Таким образом, предлагаемая ИИС является достаточно простым прибором, которое позволит проводить прецизионные измерения векторных величин магнитного поля, а также малых угловых перемещений какихлибо тел, находящихся в геомагнитном или искусственно созданном магнитном поле. Поэтому данная ИИС, построенная на базе феррозондового преобразователя, впоследствии может применятся в различных областях: поиск и установление местоположения всех ферромагнитных предметов; поиск и установление местоположения больших объектов с подавлением влияния малых предметов; использование ИИС в качестве компаса.
Список литературы
1. Афанасьев, Ю.В. Средства измерения параметров магнитного поля [Текст]/ Ю.В. Афанасьев, Н.В. Студенцов. - Л.: Энергия, 1976. – 320 с.
523
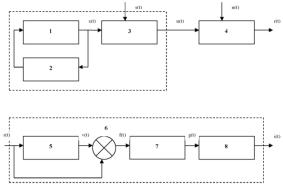
2.Афанасьев, Ю.В. Магнитометрические преобразователи, приборы, установки [Текст]/ Ю.В. Афанасьев, Н.В. Студенцов, А.П. Щелкин. - Л.: Энергия, 1972. –
400 с.
3.Арбузов, С.О. Магниточувствительные поисковые приборы [Текст]/ С.О. Арбузов // Специальная техника, 2000. - № 6.
4.Устройство для измерения градиента магнитного поля [Текст]: авторское свидетельство № 668474/26 СССР. / Афанасьев Ю.В., Катков Ю.В. - заявлено 30.05.60; опубл. в Б.И. 1962, № 9.
Н. В. Менлыгалиев, магистрант
К. Н. Леонов, кандидат технических наук Ижевский государственный технический университет
имени М. Т. Калашникова
Генератор хаотических сигналов с инвариантными свойствами
В связи со стремительным развитием беспроводных технологий связи все больший интерес вызывает применение широкополосных систем связи с хаотической несущей. К настоящему времени разработаны и исследованы различные варианты построения систем связи использующих хаотическую несущую, но используемые в этих системах способы передачи сигналов обладают рядом недостатков, которые препятствуют их распространению [1‒5]. В связи с этим Леоновым и Ушаковым был предложен новый способ передачи цифровой информации на основе инвариантного синхронного хаотического отклика [6].
Генератор хаотических сигналов с инвариантными свойствами
Структурная схема инвариантной системы связи показана на рис. 1.
Рис. 1. Структурная схема инвариантной системы связи: 1 – нелинейный элемент генератора хаотических сигналов, 2 – цепь обратной связи, 3 – управляемый инвертор, 4 – канал связи, 5 – нелинейный элемент приемника хаотических сигналов, 6 ‒ умножитель, 7 – интегратор, 8 – формирователь импульсов
524
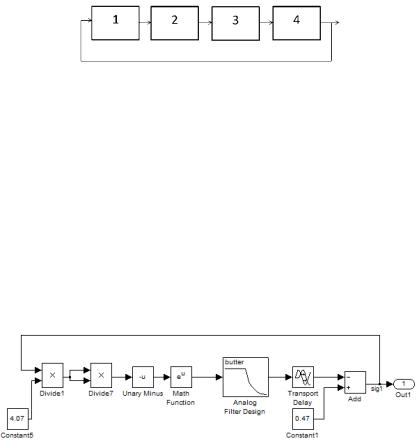
Результаты моделирования выявили, что существенное влияние на форму и спектр выходного сигнала оказывают параметра линии задержки η, порядка фильтра нижних частот n и параметр сравнения дискриминатора b. В частности было выяснено:
1)с увеличением значения линии задержки спектр мощности сигнала генератора хаоса сглаживается. При больших значениях линии задержки выбросы в спектре мощности сигнала генератора практически отсутствуют;
2)чем больше порядок фильтра нижних частот, тем больше крутизна спада спектра мощности генератора на полосе среза фильтра. Таким образом, использование фильтров высокого порядка позволяет получить спектр мощности, ограниченный в частотном диапазоне частотой среза фильтра нижних частот;
3)параметр сравнения дискриминатора должен иметь некоторое экспериментально подобранное значение, удовлетворяющее требованиям уверенной генерации хаотических колебаний и требуемому спектру мощности.
Таким образом, построенная модель работоспособна и может применяться в инвариантной системе связи.
На данный момент перед нами стоит проблема физической реализации разработанной модели и последующего ее внедрения. При рассмотрении структурной схемы генератора, показанной на рис. 2 легко заметить, что она весьма схожа с «классической» схемой ФАПЧ. Отличие заключается
втом, что роль фазового детектора в генераторе хаотических колебаний выполняют дискриминатор в паре с нелинейным элементом. Исходя из этого, физическая реализация предложенного генератора с помощью современной элементной базы не должна представлять больших трудностей.
Нами предлагается две возможные реализации генератора:
1)аналоговый генератор, состоящий из задающего генератора с кварцевой стабилизацией, резонансного контура (обладает инвариантностью выходного напряжения к отклонению частоты входного сигнала от центральной частоты контура) и ФНЧ в цепи обратной связи и варикапа в частотозадающей цепи генератора;
2)цифровой генератор на ПЛИС или цифровом сигнальном процессоре. В связи с постоянным развитием и расширением области применения
цифровых технологий наиболее перспективной является разработка цифрового генератора.
По ряду причин наименьшие трудности должна представлять физическая реализация на ПЛИС:
1)большое разнообразие элементной базы позволяющее подобрать ПЛИС под конкретную задачу;
2)наличие специализированного программного обеспечения, позволяющего разработать проект устройства для данной ПЛИС;
526
3)возможность создания проекта цифрового устройства в виде принципиальной электрической схемы или программы на специальных языках описания аппаратуры: Verilog HDL, VHDL, AHDL;
4)большая гибкость современных ПЛИС, которые могут содержать встроенные процессор, ОЗУ, ПЗУ и т. д.
На данный момент ведется активная работа по реализации цифрового генератора хаотических сигналов с инвариантными свойствами на ПЛИС. При реализации планируется использовать ПЛИС фирмы Altera, которые являются наиболее доступными на массовом рынке. При разработке проекта будет использоваться пакет программ Quartus II 9.1, NIOS II EDS 9.1, ModelSim AE 6.5b фирмы Altera.
Список литературы
1. Kocarev, L. Experimental demonstration of secure communications via chaotic synchronization [Текст]/ K.S. Halle, K. Eckert, L. Chua, U. Parlitz // Int. J. Bifurcation and Chaos,1992. -V. 2. - №3.- P.709.
2.Dedieu, H. Chaos shift keying: Modulation and demodulation of a chaotic carrier using self-synchronizing Chua's circuits [Текст]/ M.P. Kennedy, M. Hasler // IEEE Trans. Circuits and Systems, 1993. V. CAS-40.-№10.- P. 634.
3.Yongxiang, Xia. Performance of Differential Chaos-Shift-Keying Digital Communication Systems Over a Multipath Fading Channel With Delay Spread [Текст] / Chi K. Tse, C. M. Lau Francis // IEEE Trans. Circuits and Systems,2004. - V. CAS-51. - №12. - P. 680.
4.Kolumbán, G. Chaotic communications with correlator receivers: Theory and performance limits [Текст]/ M.P. Kennedy, Z. Jako, G. Kis // Proc. IEEE, 2002.- V. 90. - P. 711.
5.Dmitriev, A.S. Basic Principles of Direct Chaotic Communications [Текст]/ M. Hasler, A.I. Panas, K.V. Zakharchenko // Nonlinear Phenomena in Complex Systems, 2003.- V. 6. -№1. -P. 488.
6.Леонов, К.Н. Инвариантный способ передачи информации в системах с хаотиче-
скими сигналами [Текст] / К.Н. Леонов, П.А. Ушаков // Вестник ИжГТУ, 2010. №4.-С.
92-96.
7.Кальянов, Э.В. Автопараметрическая система с запаздыванием и инерционностью [Текст]/ Э. В. Кальянов // ЖТФ, 2007. -том 77. -Вып. 8. -С.5.
8.Леонов, К.Н. Хаотический широкополосный приемопередатчик для инвариантной системы связи на основе генератора хаоса с задержкой и дискриминатором [Текст]/ К.Н. Леонов, А.А. Потапов, П.А. Ушаков // IV Всероссийская конференция «Радиолокация и радиосвязь»: сб. докладов, 2010. –С.361-365.
527
Д. Н. Мерзляков, магистрант
В. В. Хворенков, доктор технических наук, профессор Ижевский государственный технический университет имени М. Т. Калашникова
Разработка модернизированной конструкции прибора PDU-52
Разработка является актуальной в области проектирования микрополосковых СВЧ устройств, в частности, многоканальных коммутаторов и усилителей. Цель разработки заключается в усовершенствовании конструкции прибора PDU-52 при сохранении его радиоэлектронных свойств.
Прибор PDU – 52 конструктивно состоит из коммутационной части и усилительных модулей. Задача состоит в том, чтобы данный прибор уместить на одной подложке, но поликор, в силу своей неустойчивости к высоким температурам, может иметь размеры не превышающие 64 х 48 mm, что не позволяет осуществить данную цель. В связи с этим необходим новый альтернативный диэлектрический материал. Температурный коэффициент линейного расширения подложек фирмы Rogers меньше. Платы Rogers обеспечивают достаточное экранирование микрополосковой линии передачи (МПЛ) от внешней среды, таким образом можно будет отказаться от титанового корпуса и выполнить корпус из более легкого и удобного для обработки материала. Таким образом, переведя прибор PDU-52 на платы из фирмы Rogers, мы можем выполнить поставленные задачи, в перспективе получив прибор в корпусе из гораздо более легкого в обработке материала, на одной общей плате.
На данном этапе работы был произведен расчет и моделирование коммутационной части усилителя с учетом изменения свойств подложки (табл. 1).
Таблица 1. Характеристики материала подложки
Наименование |
Относительная |
Тангенс угла |
Высота подложки |
|
диэлектрическая |
диэлектрических |
h, мм |
|
проницаемость ε |
потерь tgδ |
|
|
|
|
|
Rogers TMM10i |
9,8 ± 0,245 |
0,002 |
0,635 |
|
|
|
|
Поликор |
9,7 |
0,0001 |
0,5 |
|
|
|
|
Рассчитана ширина микрополосков на подложках из поликора и из Rogers TMM10i. Проверены передаточные характеристики каналов прибора PDU-52M при конструктивных размерах топологии, соответствующих конструкторской документации прибора PDU-52. Для этого построена модель входного микрополоскового тракта прибора в модуле EMSight программы Microwave Office. Топология входной части коммутатора на подложке Rogers TMM10i показана на рис. 1.
528
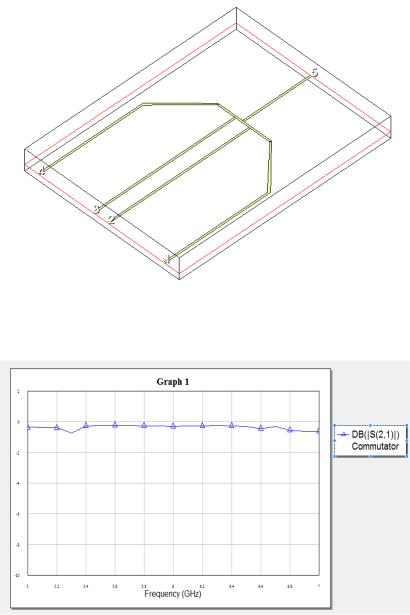
Рис. 1. Топология входной части коммутатора
В результате моделирования были получены следующие графики передаточных характеристик каналов коммутатора. График первого канала коммутатора представлен на рис. 2.
Рис. 2. Передаточная функция первого канала коммутатора
529
График иллюстрирует, что в полосе пропускания первого канала (5,12
– 6,88 ГГц) затухание не превышает 0,74 дБ. Построим соответствующие графики для остальных каналов.
Передаточная функция микрополоскового тракта второго канала представлена на рис. 3.
Рис. 3. Передаточная функция второго канала коммутатора
График иллюстрирует, что в полосе пропускания второго канала (9,12
– 10,88 ГГц) затухание не превышает 0,38 дБ.
Передаточная функция микрополоскового тракта третьего канала представлена на рис. 4.
Рис. 4. Передаточная функция третьего канала коммутатора
График иллюстрирует, что в полосе пропускания второго канала (13,12
– 14,88 ГГц) затухание не превышает 2,38 дБ.
Передаточная функция микрополоскового тракта четвертого канала представлена на рис. 5.
530
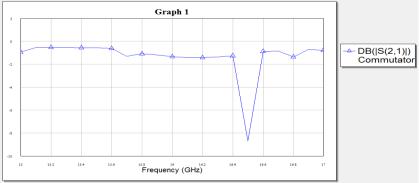
Рис. 5. Передаточная функция четвертого канала коммутатора
График иллюстрирует, что в полосе пропускания второго канала (15,12
– 16,88 ГГц) затухание не превышает 8,69 дБ. Большое затухание на частоте 16,5 ГГц обусловлено индуктивной составляющей.
В моей работе был произведен расчет ширины микрополосков на двух диэлектрических подложках: а) Поликор; б) Rogers. Были получены следующие результаты: а) ширина линии на Поликоре w = 0,49 mm; б) на Rogers w = 0,48 mm. Исходя из полученных данных, построена топология микрополосковой линии. Далее получены передаточные функции входных каналов коммутатора. На основании последнего сделан вывод, что затухания в каналах соответствуют нормам, заявленным в технической документации прибора PDU52. Поэтому данную топологию можно использовать на подложке Rogers TMM10i. Также при расчете передаточных функций, была получена особенность: при работе на 4 канале в диапазоне частот от 15,12 до 16,88 ГГц проявляются сильные затухания. Это связано с ростом индуктивности, так как с увеличением частоты сопротивление индуктивности увеличивается.
Список литературы
1.Справочник по расчету и конструированию СВЧ полосковых устройств [Текст]/ С. И. Бахарев [и др.]. – М : Радио и связь, 1982. – 328 с., ил.
2.Проектирование СВЧ устройств с помощью Microwave office. [Текст]/ под ред. В. Д. Разевига. – М.: СОЛОН-Пресс, 2003.- 496 с.
531
А. И. Миловидова, студент
А. И. Нистюк, доктор технических наук, профессор Ижевский государственный технический университет имени М. Т. Калашникова
Экспериментальная установка для измерений колебаний сенсорного экрана
Устройства, работающие с оператором, должны иметь средства отображения информации и органы управления [1, 2]. В последнее время широкое распространение получили сенсорные экраны, совмещающие средства отображения и управления. Сенсорный экран реагирует на прикосновения к нему, за счет чего осуществляется управление устройством. Сенсорные экраны используются в мобильных телефонах, смартфонах, коммуникаторах, планшетах, платежных терминалах, информационных киосках, оборудовании для автоматизации торговли, операторских панелях, плеерах и, в последнее время, в фото- и видеокамерах. Перечисленные устройства и подобные им предназначены для работы с оператором, и должны быть максимально адаптированы под его эргономические характеристики. Несмотря на очевидные преимущества сенсорного экрана, у него существенный недостаток - отсутствие обратной связи за счет тактильных ощущений.
В работе [3] доказывается возможность создания ощущений объема изображений путем вибрации с переменной амплитудой сенсорного экрана. Модель такого сенсорного экрана представляет собой колебательную систему с динамическим возбуждением.
Отсюда возникла задача измерения характеристик колебаний экрана и вызываемые ими тактильные ощущения.
Таблица. Параметры датчиков расстояния
Параметр |
Индуктив- |
Ультразвуко- |
Триангуляционные |
Радарные |
|
ные датчики |
вые датчики |
датчики |
датчики |
||
|
|||||
Расстояние |
0...20 мм |
10 мм... 10 м |
10 мм...1 м |
10 мм... |
|
|
|
|
|
1,1 км |
|
Разрешение |
0,1 мкм |
0,1 мкм |
1 мкм |
0,5 мм |
|
Точность |
1 мкм |
0,2 мкм |
2 мкм |
2 мм |
|
Линейность |
0,4...5% |
0,5% |
0,05...1% |
0,001% |
|
Время |
0,3 мс |
20 мс |
1 мс |
1 мс |
Сравнительный обзор существующих на рынке датчиков расстояния представлен в работе [111 с, 4 ], которые применяются для самых различных задач автоматизации измерений. Более подробно описаны триангуляционные датчики расстояния, предназначенные для измерения дистанции с микронной точностью. Из приведенной таблицы можно отметить триан-
532
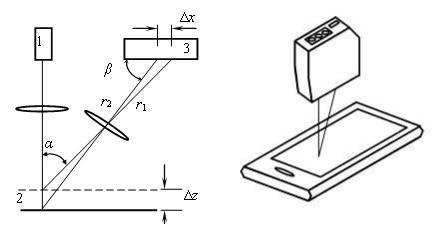
гуляционные датчики, удовлетворяющие требованиям быстродействия и точности измерений колебаний сенсорных экранов.
Метод измерения триангуляционных датчиков основан на расчете расстояния через соотношения размеров треугольника. Он позволяет измерять как относительное изменение расстояния от датчика до контролируемого объекта, так и абсолютную его величину. Причем контролируемое расстояние может иметь масштаб от нескольких микрометров до сотен и тысяч метров.
Триангуляционную схему условно можно разделить на три части: излучатель, отражающая поверхность, приемник (рис. 1).
Рис. 1. Схема триангуляционного изме- |
Рис. 2. Измерение колебаний сен- |
рителя: 1 ‒ излучатель; 2 ‒ отражающая |
сорного экрана |
поверхность; 3 ‒ приемник |
|
Каждая поверхность имеет свойство отражать или рассеивать падающее излучение. Рассеяние излучения поверхностью контролируемого объекта используется как физическая основа для получения информации о расстоянии до этой поверхности.
Любая контролируемая поверхность характеризуется неровностью и высотой микронеровностей. Как правило, требуемая точность измерения обратно пропорциональна высоте микронеровностей контролируемой поверхности.
В зависимости от конкретной реализации, для регистрации сформированного изображения качестве приемника используют либо фотодиодную линейку, либо позиционно-чувствительный приемник.
Схема триангуляционного измерения, приведенная на рисунке 1, работает следующем образом. Излучатель 1 формирует изображение светового пятна на контролируемой поверхности 2. Рассеянный контролируемой поверхностью свет попадает в приемник 3. Таким образом, в плоскости
533
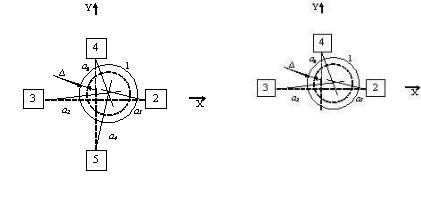
нажатия на клавишу и др. Особенно актуален вибрационный узел для скрытного сообщения или при невозможности использовать другие органы восприятия оператора. Направление, амплитуда и частота вибрации являются теми характеристиками, которые позволяют оператору принимать правильные решения. Следовательно, измерение перечисленных характеристик вибрации во время заводских испытаний или при эксплуатации являются актуальными.
Авторами предлагается устройство и математическое обеспечение измерений вибрационных узлов на основе несбалансированной массы с помощью триангуляционных датчиков.
Рис. 1. |
Схема измерения четырьмя датчи- |
Рис. 2. Схема измерения тремя |
ками: 1 |
‒ тело вращения; 2,3,4,5 ‒ датчики |
датчиками: 1 ‒ тело вращения; |
|
|
2,3,4 ‒ датчики |
Устройство, схема измерения которого изображена на рис. 1, позволяет измерять радиальные деформации и колебания тел вращения. Для того, чтобы произвести измерения, лазерные триангуляторы 2, 3, 4, 5 устанавливаются с четырех сторон измеряемого тела 1 по осям координат.
Экраны всех лазерных триангуляторов должны быть установлены параллельно образующей тела вращения на расстоянии, обеспечивающем заданную точность измерения.
В первоначальный момент расстояние до поверхности тела вращения 1 равно a0, а радиус тела вращения R0. Если при вращении тела устройством привода, произошло смещение его оси по координатам X и Y на величину x и y, и при этом радиус тела вращения изменился на величину Δ, то в результате этого расстояние изменится и станет равным соответственно a1 , a2 , a3 , a4 . Составим систему уравнений:
535
Список литературы
1.Нистюк, А.И. Технология тактильных ощущений объема изображений на сенсорном экране [Текст]/А.И. Нистюк //Интеллектуальные системы в производстве. -2012. -№ 2. -С. 120-122.
2.Нистюк, А. И. Измерение деформаций и колебаний металлических изделий
спомощью электронно-лучевых трубок с металловолоконным экраном [Текст]/А.И. Нистюк // Датчики систем измерения, контроля и управления: межвузовский сб. науч. тр. - Пенза: Пенз. политехн. ин-тут, 1983.- вып. 3.- С. 32-34.
А. Г. Миловзоров, доцент; А. Д. Миронов, аспирант
Г. В. Миловзоров, доктор технических наук, профессор Удмуртский государственный университет Институт нефти и газа им. М. С. Гуцериева
Телеметрические навигационные системы с передачей данных по гидравлическому каналу связи
Внастоящее время все больше скважин имеют сложную траекторию, поэтому возникает необходимость обеспечения эффективного контроля пространственного положения ствола скважины с целью точного попадания забоя скважин в заданную точку пространства и соблюдению проектного профиля скважины. Для этого применяют телеметрические навигационные системы.
Телеметрические навигационные системы в процессе бурения скважин позволяют получать на поверхности в реальном масштабе времени текущие значения зенитного угла, азимута и положения отклонителя относительно ствола скважины. А программное обеспечение позволяет строить фактическую и прогнозировать дальнейшую траекторию скважины.
Вобщем случае телеметрические навигационные системы осуществляют измерение первичной скважинной информации, ее передачу по каналу связи забой ‒ устье, прием наземным устройством, обработку и представление оператору результатов обработки [1].
Существующие телесистемы состоят из следующих основных частей: − забойная аппаратура, которая включает в себя первичные
преобразователи измеряемых параметров, таких как: первичные преобразователи направления бурения; геофизических параметров - данных каротажа;
− наземная аппаратура, к которой относятся пульт оператора, пульт бурильщика и т.д.;
− канал связи (кабельный, электромагнитный, гидравлический); − дополнительные блоки (забойный источник электрической энергии
для телеметрических навигационных систем с беспроводным каналом
537
связи, антенну и принадлежности к ней для электромагнитного канала связи и прочее).
Врезультате многолетних исследований и практического использования в реальных условиях бурения широкое применение нашли три канала связи:
− электропроводный; − гидравлический; − электромагнитный.
У каждого из этих каналов связи имеются свои преимущества и недостатки. Разнообразие условий бурения, а также экономическая целесообразность определяют каждому каналу связи свою область применения. В настоящее время широкое распространение получили телеметрические навигационные системы с гидравлическим каналом связи.
Гидравлический канал связи отличаются от других наличием устройства, создающего в потоке бурового раствора импульсы давления. Для генерирования импульсов давления в буровом растворе используются несколько различных по типу устройств: роторные и поршневые пульсаторы, перепускные клапаны, электродвигатели, связанные с клапаном пульсатора. Сигнал, создаваемый ими, подразделяется на три вида: положительный импульс давления, отрицательный импульс и непрерывная волна.
Положительные импульсы создаются путем кратковременного частичного перекрытия потока бурового раствора, что приводит к повышению внутритрубного давления, этот всплеск давления и является импульсом основного сигнала.
Вслучае с отрицательными импульсами, клапан открывается и частично направляет буровой раствор в затрубное пространство, и при этом происходит кратковременное понижение давления.
Гидравлические импульсы давления, близкие к гармоническим, создаются с помощью электродвигателя, который вращает клапан пульсатора. Гидравлические импульсы давления поступают по столбу бурового раствора на поверхность, где закодированная различными способами информация декодируется и отображается в виде, приемлемом для восприятия оператором [2]. Диаграммы гидравлических импульсов давления представлены на рисунке.
Широкое распространение гидравлического канала связи для передачи информации вызвано следующими его преимуществами:
− гидравлический канал связи не требуется дополнительных затрат на его организацию, так как в нем в качестве канала связи используется столб бурового раствора в бурильной колонне;
− большая дальность действия; − относительная простота осуществления связи;
− гидравлический канал связи не нарушает (по сравнению с кабельным) технологические операции при бурении и не зависит от геологиче-
538
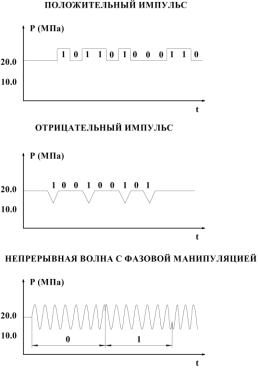
ского разреза (по сравнению с электромагнитным).
Рисунок. Диаграммы гидравлических импульсов при различных способах их формирования
Недостатками данного канала связи являются:
−низкая информативность из-за относительно низкой скорости передачи (по сравнению с кабельным и электромагнитным каналами связи);
−низкая помехоустойчивость;
−последовательность в передаче информации;
−необходимость в источнике электрической энергии (батарея, турбогенератор);
−отбор гидравлической энергии для работы передатчика и турбогенератора;
−невозможность работы с продувкой воздухом и аэрированными жидкостями.
Одной из основных проблем при использовании гидравлического канала связи для передачи забойной информации является выделение полезного сигнала на фоне помех, которые можно разделить на: помехи, связанные с работой буровых насосов, и помехи, связанные с работой бу-
539
рового инструмента [3]. Работа генератора импульсов может существенно влиять на устойчивость гидравлического забойного двигателя [4].
Гидравлический канал связи, используемый для передачи измерительной информации от забойной аппаратуры к наземной, в последние годы находит все более широкое применение на практике. При этом анализ известных решений в данной области показывает, что наиболее перспективными направлениями совершенствования аппаратуры являются: увеличение скорости передачи информации, повышение помехоустойчивости, уменьшение влияния на буровое оборудование.
Список литературы
1. Акбулатов, Т. О. Телеметрические системы в бурении [Текст]/ Т.О. Акбулатов [и др.]– Уфа: изд– во УГНТУ, 1999. – С. 65.
2.Молчанов, А.А. Бескабельные измерительные системы для исследований нефтегазовых скважин (теория и практика) [Текст]/ А.А. Молчанов, Г.С. Абрамов.
–М.: ОАО «ВНИИОЭНГ», 2004.‒516 с.
3.Греков, С.В. Анализ влияния работы телеметрической системы с гидравлическим каналом связи на устойчивость работы гидравлических забойных двигателей и их воздействие на параметры гидравлического сигнала [Текст] / С.В. Греков - Нефтегазовое дело, 2005.
4.Греков, С.В. Исследование помех в гидравлическом канале связи [Текст]/ С.В. Греков - Нефтегазовое дело, 2005.
А. Г. Миловзоров, доцент
И. В. Наговицина, преподаватель Г. В. Миловзоров, доктор технических наук, профессор
Удмуртский государственный университет Институт нефти и газа имени. М. С. Гуцериева
Постановка задачи оптимизации проводки скважин в заданном направлении в условиях неопределенности
Техническое совершенствование и дальнейшее повышение эффективности буровых работ требуют в настоящее время выявления новых направлений применения наиболее современных технологий строительства нефтяных и газовых скважин. Вместе с тем, учитывая высокую стоимость бурения глубоких скважин, особенно в осложненных геологотехнических условиях, повышение эффективности возможно путем оптимизации процесса механического углубления ствола скважины.
На сегодняшний день технология бурения представляет собой комплекс технологических процессов, включающий в себя процесс углубления скважины, формирования требуемого профиля траектории ствола скважины и процесс подготовки скважины к эксплуатации. В современных условиях в ходе строительства нефтегазовых скважин такой процесс,
540
как формирование требуемого профиля траектории ствола скважины, является основным. Такое внимание к данному процессу обусловлено, прежде всего, труднодоступностью разрабатываемых месторождений, усложнение геологических условий бурения, увеличение глубин залегания продуктивных пластов. В данных условиях точность формирования требуемой траектории ствола скважины во многом определяет такие показатели, как затраты и сроки строительства, дебет и срок эксплуатации скважины, безопасность и др. [1].
Каждая скважина бурится по проекту, предусматривающему вполне определенное положение ствола в пространстве, которое может быть достигнуто с помощью различных технических средств. Для проводки скважины строго по проекту необходимо в любой момент с достаточно высокой точностью знать фактическое положение ствола в пространстве, уметь управлять траекторией движения долота в процессе бурения.[2] Для обеспечения эффективности бурения используются буровые растворы, которые очищают забой от выбуренной породы и транспортируют породу из скважины, активизируют процесс разрушения горной породы долотами предотвращают осыпи и обвалы, а так же оказывают смазывающее и антикоррозионные действия на буровой инструмент.
Однако, здесь стоит учитывать, что при бурении происходит пространственное искривление скважины, что в свою очередь влечет за собой осложнения при добычи нефти, затруднения при спуске обсадных колонн, нарушение герметичности обсадных колонн, удлинение ствола скважины, расход большей мощности на вращение бурильной колонны и тд.
Так, при рассмотрении характерных особенностей построения современных систем управления процессом формирования траектории ствола скважины, учитываются, прежде всего, параметры траектории ствола скважины. Пространственное положение текущей точки траектории определяется декартовыми и цилиндрическими координатами (рисунок).
541
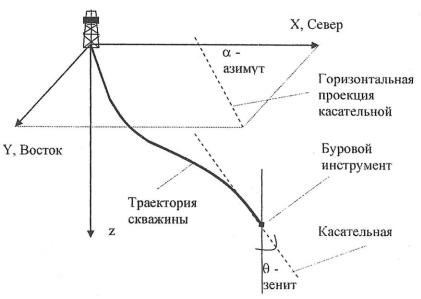
Рисунок. Пространственное положение траектории.
Вкачестве параметров, характеризующих степень искривленности траектории скважины, применяются: интенсивность изменения азимутального, зенитного угла, пространственная интенсивность искривления.
Как правило, объектом управления при формировании профиля ствола скважины выступает компоновка низа бурильной колонны (КНБК), траектория движения которой определяет форму профиля ствола скважины.
Необходимо так же учитывать воздействия на объект управления, параметры определяющие его движения:
‒технологические параметры (осевое давление на долото, частота вращения долота, параметры бурового раствора);
‒ геометрические параметры (структура и взаимное расположение элементов КНБК);
‒ параметры пространственной ориентации (угол установки отклонителя);
Впроцессе бурения, протекающем в условиях значительной неопределенности, возникают сильные и непредсказуемые воздействия, основа которых – как горно-геологические, так и технико-технологические причины. Факторы, влияющие на искривление ствола скважины можно разделить на три группы: геологические (наклонное залегание пластов, чередование пород, наличие тектонических нарушений, напряженное состояние пород и др.), технические (несоосность вышки относительно осей
542
стола ротора и шахтового направления, использования искривленных труб и др.) и технологические (нагрузка на долото и частота вращения и др.).
Постановка задачи оптимизации проводки скважины в заданном направлении в условиях неопределенности может быть сформулирована как оперативное принятие решений, обеспечивающих намеченный ход процесса проводки скважины в условиях непредсказуемых воздействий. Эта задача является комплексной проблемой, в которую входят технологический процесс бурения, геологические особенности пород, а так же математическое моделирование и проектирование процесса бурения и совершенствование методов принятия решений при управлении буровыми работами.
Список литературы
1.Информационно-управляющие системы в нефтегазодобывающей промышленности [Текст]/ под ред. С.Т. Кусимова, Б.Г. Ильясова, В.И. Васильева. – М.: Машиностроение, 2008. – 319 с.
2.Попов, А.Н. Технология бурения нефтяных и газовых скважин [Текст]: учебник для вузов/ А.Н. Попов, А.И. Спивак. ‒ Недра, 2007.
Е. С. Морозова, старший преподаватель Г. В. Миловзоров, доктор технических наук, профессор
Уфимский государственный авиационный технический университет
Первичные преобразователи инклинометрических систем
Одной из основных технологических операций, осуществляемых в процессе бурения наклонно направленных и горизонтальных скважин, является контроль комплекса параметров искривления скважин с целью обеспечения оптимальных режимов бурения и решения многих других задач. Не менее важной при бурении скважины является операция ориентирования породоразрушающего инструмента бурильной колонны при проводке ствола скважин в заданном направлении либо удержания направления в конусе допустимых угловых отклонений. Для осуществления указанных операций служит инклинометрическая система (ИнС) [3].
Под ИнС понимают комплекс технических средств, предназначенных для контроля комплекса угловых параметров пространственной ориентации твердых тел по отношению к базисной системе координат, связанной с Землей. ИнС нашли широкое применение в геофизике при определении пространственного положения траектории скважин.
ИнС включают в свою структуру следующие первичные преобразователи: акселерометры, феррозонды, маятники, гироскопические датчики угловой скорости [2].
Принцип работы акселерометра заключается в следующем. Акселерометры измеряют проекции абсолютного ускорения на их оси чувстви-
543
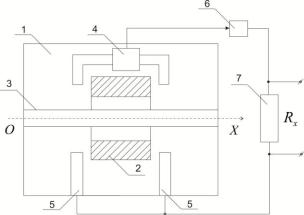
тельности. При неподвижном основании акселерометры измеряют лишь проекции ускорения свободного падения.
С помощью трех акселерометров измеряются три проекции вектора ускорения свободного падения на оси чувствительности акселерометров, которые функционально связаны с искомыми зенитным и визирным углами. Акселерометр (рис. 1) содержит корпус 1, чувствительный инерционный элемент 2, перемещающийся по направляющей оси 3, датчик перемещения 4, датчик силы 5, усилитель обратной связи 6 и резистор цепи обратной связи 7 [2].
Когда корпус прибора 1 расположен горизонтально, т.е. ось чувствительность OX направлена перпендикулярно вектору свободного падения, инерционное тело 2 будет находиться в нейтральном положении, и тогда на выходе датчика 4 сигнала не будет. Если прибор наклонить относительно горизонта, то инерционное тело сместится по оси OX , и на выходе датчика появится сигнал рассогласования, которые после усиления и преобразования подается на датчик силы 5, которые возвращает тело 2 в нейтральное положение. В этом случае напряжение на резисторе 7 обратной связи будет являться выходным сигналом акселерометра, который пропорционален измеряемой проекции вектора ускорения свободного падения на ось чувствительность.
Рис. 1. Кинематическая схема линейного акселерометра
С помощью феррозондов, неподвижно закрепленных в корпусе прибора, измеряются три проекции вектора магнитного поля Земли на их оси чувствительности, которые функционально связаны с магнитным азиму-
том [1].
Обычно феррозонд выполняется с двумя параллельно расположенными сердечниками из пермаллоя или «аморфного железа». Каждый из сердечников имеет две или три обмотки: обмотку возбуждения, сигнальную
544
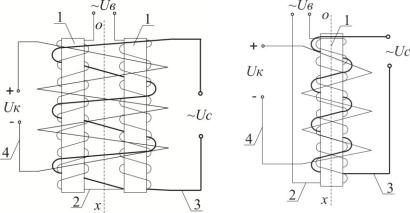
обмотку и обмотку компенсационную. Часто сигнальная обмотка одновременно является и компенсационной.
Феррозонд принимает более компактную форму, если вместо двух отдельных измерительных обмоток используется одна, охватывающая оба сердечника (рис. 2а) или один сердечник с уложенными на нем обмотками возбуждения, сигнальной и компенсационной (рис. 2б).
Переменный ток в последовательно и встречно включенных обмотках возбуждения создает магнитные поля противоположных направлений. Измерительные обмотки включены последовательно, поэтому напряжение на выходе сигнальной обмотки при отсутствии внешнего магнитного поля равно нулю. Под действием магнитного поля Земли (МПЗ) в сигнальных обмотках феррозондов появляется информационное напряжение второй гармоники, амплитуда которой пропорциональна проекции вектора напряженности на ось чувствительности OX феррозонда (рис. 3). Этот сигнал после усиления и выпрямления в фазочувствительном усилителе поступает на вход компенсационной обмотки, которая создает постоянное магнитное поле, компенсирующее магнитное поле Земли в объеме ферро-
зонда. Ток, протекающий в компенсационной обмотке, пропорционален
проекции вектора напряженности МПЗ T на ось чувствительности феррозонда. При этом напряжение на резисторе 6 обратной связи является выходным сигналом, который пропорционален модулю измеряемого век-
тора напряженности МПЗ и косинусу угла поворота оси чувствительности
датчика относительно T .
а) б)
Рис. 2. Принципиальные схемы феррозондов: 1- сердечник, 2- обмотка возбуждения, 3- сигнальная обмотка, 4- компенсационная обмотка, ox- ось чув-
ствительности феррозонда
545
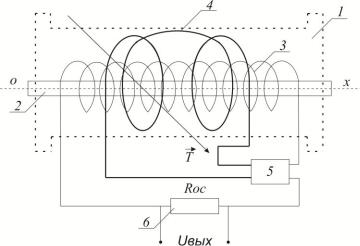
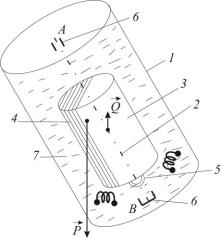
Рис. 4. Кинематическая схема датчика визирного угла: 1 ‒ корпус, 2 ‒ ось вращения, 3 ‒ поплавок, 4 ‒ эксцентрический груз, 5 ‒ датчик угла поворота (СКВТ), 6 ‒ опоры подвеса маятника, 7 ‒ демпфирующая жидкость
К числу достоинств ТВГ следует отнести его большую ударопрочность, стойкость к вибрационным перегрузкам, что является следствием отсутствия в датчике подшипников, как в классическом гироскопе. Поэтому срок службы ТВГ достаточно велик. Датчик характеризуется широким диапазоном измеряемых угловых скоростей, малыми габаритами и весом, малой потребляемой мощностью, что позволяет создавать на их основе автономные гироскопические инклинометры с электронной памятью.
Техническая сложность создания гироскопических преобразователей для инклинометров определяется необходимостью малых габаритов приборов.
Гироскопические приборы позволяют производить высокоточные исследования скважин, в которых имеются внешние магнитные влияния.
Вряде конструкций инклинометров используются три жесткозакрепленных магниточувствительных преобразователя и три неподвижно закрепленных акселерометра [1].
Вприведенной статье рассмотрены принципы работы первичных преобразователей, входящих в конструкцию инклинометрических устройств, перечислены их особенности и приведены кинематические, принципиальные и функциональные схемы.
Список литературы
1.Исаченко, В.Х. Инклинометрия скважин [Текст]/ В.Х. Исаченко.- М.: Недра,
1987.- 216с.
2.Ковшов, Г.Н. Приборы контроля пространственной ориентации скважин при бурении [Текст]/ Ковшов Г.Н., Коловертнов Г.Ю. - Уфа: Изд-во УГНТУ, 2001.- 228 с.
3.Миловзоров, Г.В. Анализ инструментальных погрешностей инклинометрических устройств [Текст]/ Г.В. Миловзоров.- Уфа: Гилем, 1997. -184с.
547
В. Н. Мохов, магистрант В. В. Хворенков, доктор технических наук, профессор
Ижевский государственный технический университет имени М. Т. Калашникова
Разработка технологических схем функционирования и взаимодействия локальной системы оповещения «Воткинской ГЭС» по интеграции ее в региональную автоматизированную систему централи-
зованного оповещения Удмуртской Республики»
Локальные системы оповещения (ЛСО) предназначены для обеспечения доведения сигналов и информации оповещения до персонала объекта, представителей власти и населения. В этой связи, разработка функциональной модели системы оповещения Воткинской ГЭС является актуальной в области обеспечения безопасности населения, а также в области информационных коммуникаций. Локальная система оповещения представляет собой организационно-техническое объединение дежурной службы потенциально опасного объекта, технических средств оповещения, сетей вещания и линий связи. В статье рассматривается начальный этап создания объекта – программное моделирование системы на местности. Модель включает в себя создание среды передачи данных между узлами ЛСО, организацию коммуникаций внутри ЛСО и анализ результата работы системы, показывающий работоспособность и функциональность программной реализации объекта. [1] В рамках исследования применен оптимальный вариант создания имитационной модели функционирования телекоммуникационной системы, которой в данном случае является локальная система оповещения – продукт NetCracker Professional. NetCracker – это система автоматизированного проектирования, моделирования и анализа различных проводных и беспроводных сетей. Программа позволяет создавать отчеты, содержит инструменты задания характеристик трафиков различных протоколов, в базе данных представлены сетевые устройства ведущих производителей.
Программа NetCracker поддерживает возможность выбора фона, в качестве фона схемы сети выбран сегмент Yandex Maps, соответствующий территории Воткинской ГЭС и выбранному расположению элементов системы. Все элементы на схеме взяты из библиотек готового оборудования NetCracker. Выбор и настройка оборудования, трафика, а так же выбор среды передачи (Radio, Coaxial, Twisted Pair) осуществлены в соответствии с требованиями, принятыми при проектировании и данными, полученными при выборе оптимального перечня устройств и материалов для реализации.
Для каждого используемого объекта базы данных NetCracker установлены характеристики соответствующего оборудования, устанавливаемого в ЛСО.
548
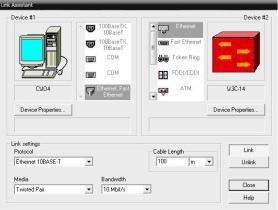
Настройка линии передачи показана на примере (рис. 1):
Рис. 1. Настройка линии передачи
Одной из главных задач исследования является проектирование сопряжения ЛСО Воткинской ГЭС и Территориальной Автоматизированной Системой Централизованного Оповещения (ТАСЦО) Удмуртской Республики. Модель содержит совокупность речевых и электросиренных узлов оповещения (РУО и СУО), узла связи, управляющей и резервной ЭВМ, районного узла связи с упрощенной моделью системы П-166, ТАСЦО УР и узла дежурной службы г. Чайковский. Соединены реализованные объекты посредством протоколов Ethernet, GSM, CDMA при использовании модемов, базовых станций каждого вида беспроводной связи, коммутаторов. Основной передающей средой является телефонная сеть районного значения (Пермский край) с возможностью интеграции служб, обозначенная на схеме в виде облака. Расстояние между единой дежурной диспетчерской службой (ЕДДС) г. Воткинска принято равным 35 км, задержка в канале – 20 секунд, эти и другие данные свободно задаются в интерфейсе программы. Сигналы с пульта П-166 поступают на ЕДДС, откуда осуществляется связь с ТАСЦО УР г. Воткинска. Показана нагрузка на телефонные линии ГЭС и города в виде столбиков рядом с соответствующими обозначениями телефонных сетей в виде облаков.
Также с помощью П-166 осуществлено сопряжение с ЕДДС г. Чайковского, откуда сигналы могут быть переданы абонентам телефонной сети (расстояние 5 км).
В дежурном режиме передача данных от узлов оповещения к пультам управления осуществляется по каналу CDMA, при возникновении неполадок на этом уровне (нарушение на линии передачи) передача переключается на GSM канал. Реализовать выход из строя оборудования или линии передачи можно при помощи команды Break.
549
Работа схемы в дежурном режиме отражена на рис. 2. Квадраты и треугольники соответствуют передаваемым пакетам, крестиком обозначены закрытые каналы передачи (GSM – резервный канал) [2].
Рис. 2. Передача данных в дежурном режиме
Отчет о времени передачи пакетов некоторых узлов по CDMA-каналу в таблице.
Таблица 1. Время передачи в режиме ЧС ТАСЦО
Name |
Source |
|
Destination |
Travel time |
Response time |
traffic |
Створ 1 |
|
Рез. ЭВМ |
1.00 s |
0.00 µs |
traffic |
Створ 1 |
|
Упр. ЭВМ |
1.00 s |
0.00 µs |
traffic |
Упр. ЭВМ |
|
РУО5 |
3.00 s |
0.00 µs |
|
|
|
|
|
|
traffic |
Упр. ЭВМ |
|
Пульт П-166 |
10.00 s |
0.00 µs |
traffic |
Упр. ЭВМ |
|
РУО6 |
7.00 s |
0.00 µs |
traffic |
Упр. ЭВМ |
|
РУО8 |
9.00 s |
0.00 µs |
traffic |
Пульт П-166 |
ЕДДС г. Вот- |
20.00 s |
0.00 µs |
|
|
|
|
кинск |
|
|
interLAN |
ЕДДС |
г. |
АСЦО УР г. |
20.00 s |
0.00 µs |
traffic |
Воткинск |
|
Воткинска |
|
|
interLAN |
П-166 |
|
ЕДДС г. Чай- |
20.00 s |
0.00 µs |
traffic |
|
|
ковский |
|
|
|
|
|
|
|
|
550
Связь с ТАСЦО осуществляется.
В результате была создана модель ЛСО Воткинской ГЭС и произведено схематическое сопряжение ЛСО с ТАСЦО Удмуртской Республики. Передача производится в допустимых рамках для подобных систем (не более 2-х минут), а значит схема может быть использована в дальнейшем для разработки и моделирования процессов оповещения абонентов сети организации. Реализованное решение по сопряжению систем оповещения так же может быть основой для проектирования, учитывая богатые возможности модернизации системы в программной среде NetCracker.
Список литературы
1.Методические рекомендации по созданию в районах размещения потенциально опасных объектов локальных систем оповещения [Текст]. – М.: ФЦ ВНИИ ГОЧС, 2003. – 22 с.
2.Локальная система оповещения Филиала ОАО «РусГидро» - «Воткинская ГЭС» [Текст].- Чайковский 59022/08-ЛСО-ГУ-ПЗ.-Рабочий проект. - Т. 1.
С. В. Наговицына, магистрант
К. В. Шишаков, кандидат физико-математических наук Ижевский государственный технический университет имени М. Т. Калашникова
Разработка полосковой СВЧ антенны
Использование полосковых СВЧ антенн является актуальным в области телекоммуникации, что связано со стремительным развитием систем связи. Естественно, что к ним предъявляется ужесточенные требования. Помимо имеющихся малых массогабаритных параметров они должны быть помехоустойчивыми, конформными, обладать необходимым коэффициентом усиления, иметь круговую поляризацию и доступны по цене. На все эти требования хорошо отвечают полосковые антенны. Но, не смотря на предъявляемые требования, для данных антенн нет определенных рекомендаций по их созданию. Как правило, такие исследования выполняются своего рода вслепую, методом проб и ошибок.
В своей работе на примере антенны простых форм я хочу представить упрощенный характер ее поведения, которым можно будет воспользоваться при синтезе антенн.
Вначале разберем, что собой представляет полосковая антенна (рис.1). Типичная конструкция полосковой антенны имеет тонкую плоскую проводящую пластину той или иной формы, размещенную на диэлектрическом слое – подложке толщиной h = (0,003 … 0,5) , ограниченном снизу проводящей экранной плоскостью, где
, ограниченном снизу проводящей экранной плоскостью, где  – длина волны в свободном пространстве [1].
– длина волны в свободном пространстве [1].
551
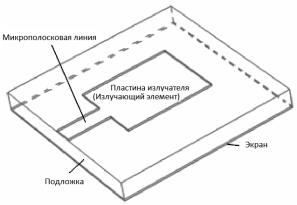
В качестве подложки обычно используются материалы с относительной диэлектрической проницаемостью  = 2…10, но, в зависимости от приложений, возможен и более широкий спектр значений
= 2…10, но, в зависимости от приложений, возможен и более широкий спектр значений  . Основное требование к материалу подложки – малые потери, характеризуемые тангенсом угла потерь tgδ. Подложки из сотового материала с
. Основное требование к материалу подложки – малые потери, характеризуемые тангенсом угла потерь tgδ. Подложки из сотового материала с  = 1,05 или полосковая антенна с воздушным зазором имеют наименьшие потери и обеспечивают наибольшую эффективность излучения антенны. Увеличение величины
= 1,05 или полосковая антенна с воздушным зазором имеют наименьшие потери и обеспечивают наибольшую эффективность излучения антенны. Увеличение величины  используемой подложки позволяет создать антенну меньших габаритных размеров с более широкой ДН [2].
используемой подложки позволяет создать антенну меньших габаритных размеров с более широкой ДН [2].
Пластины полосковой антенны чаще всего имеют прямоугольную или круглую форму, однако принципиально возможна произвольная форма с известной резонансной частотой. Выбором формы пластины можно как существенно улучшить согласование полосковой антенны с фидерной линией, так и реализовать круговую поляризацию излучения антенны.
Рис. 1. Полосковая антенна с микрополосковой линией
В ходе исследования было рассмотрено и промоделировано с помощью программы «Microwave Office» несколько факторов влияющих на работу антенны:
1.Излучение антенны при разном положении излучающего элемента и размерах выреза;
2.Излучение антенны при разной длине (ширине) излучающего элемента;
3.Излучение антенны при разном положении источника питания;
4.Излучение антенны при разной толщине подложки.
По результатам моделирования было выявлено следующее:
1. При изменении положения излучающего элемента диаграмма направленности в основном остается неизменной, что нельзя сказать про сопротивление, которое меняется скачкообразно. При этом значения активного сопротивления на диапазоне сверх высоких частот изменяются
552
слабо. Данный показатель указывает на то, что антенна хорошо излучает в этой полосе частот.
Расположение излучающего элемента на подложке горизонтально или вертикально, не оказывает никакого влияния на сопротивление, но влияет на диаграмму направленности, а именно на смену угла излучения. Однако, не стоит очень близко располагать излучающий элемент к краям подложки, т.к. это оказывает отрицательное влияние на работу антенны, что связано с максимальным напряжение по ее краям, где ток минимален, но не равен нулю. Это относится и к расположению щели. Она не должна быть близко к краю подложки, но ее расположение горизонтально или вертикально не принципиально.
2.Увеличение ширины излучающего элемента изменяет сопротивление в меньшую сторону (диаграмма направленности остается постоянной). А изменение длины излучающего элемента изменяет не только диаграмму направленности, но и увеличивает сопротивление, ухудшая работу антенны.
3.Питание антенны, в нашем случае, производилось с помощью коаксиального кабеля. Зависимость активного сопротивления антенны от частоты носит резонансный характер, где резонансная частота совпадает с центральной частотой антенны. Максимальное значение сопротивления на резонансе и есть требуемое активное сопротивление. Величина этого значения зависит от расположения точки питания. Более улучшенные характеристики для антенны были получены, когда питание антенны подводилось на расстоянии длины волны равной λ/4 , либо λ.
4.Полоса пропускания напрямую зависит от толщины подложки. При увеличении толщины подложки она расширяется, что ведет к падению добротности антенны.
Основываясь на полученных результатах, была разработана полосковая СВЧ антенна, представленная на рис.2. Ее диаграмма направленности
икоэффициент отражения отображены на рис.3 и рис.4. По конструкции она похожа на симметричный щелевой вибратор. Диапазон рабочих частот такой антенны равен 1,9 ГГц – 2,1 ГГц, диэлектрическая проницае-
мость  . Размеры антенны – 1,2х1,2х0,2см. Щель у симметричного щелевого вибратора расположена посередине. Длина щели равна λ/2, а ширина – λ/7. Питание антенны осуществляется на длине волны равной λ.
. Размеры антенны – 1,2х1,2х0,2см. Щель у симметричного щелевого вибратора расположена посередине. Длина щели равна λ/2, а ширина – λ/7. Питание антенны осуществляется на длине волны равной λ.
553
Рис. 2. Внешний вид полоскового симметричного щелевого вибратора
Рис. 3. Диаграмма направленности полоскового симметричного щелевого вибратора
Рис. 4. Коэффициент отражения по входу полоскового симметричного щелевого вибратора
554
В своей исследовательской работе сделана попытка разработать рекомендации по созданию наилучшего устройства полосковых антенн прямоугольного и квадратного типа. В дальнейшем планирую рассмотреть антенны круглой, полукруглой и овальной формы. Для каждой антенны будет разработана эквивалентная схема на основе ее математической модели, с помощью которых можно будет проследить влияние модификаций и их расположения на значения параметров антенн.
Список литературы
1.Бахарев, С.И. Справочник по расчету и конструированию СВЧ полосковых устройств [Текст] / С.И. Бахарев [и др.]; под ред. В.И. Вольмана. – М: Радио и Связь, 1982. – 328 с.
2.Поуторжков, О.М. Печатные микрополосковые антенны [Текст] / О.М.Поуторжков, З.М.Воробьева.– М.: ЦНИИ «Электроника», 1982. – 54 с.
А. Н. Невоструев, магистрант
А. В. Абилов, кандидат технических наук, доцент Ижевский государственный технический университет имени М. Т. Калашникова
Имитационное исследование протоколов маршрутизации в WI FI MESH сетях
Данное исследование дает оценку эффективности работы беспроводной ячеистой структуры, определенной в стандарте IEEE 802.11s. Конкретнее, в оценке новых возможностей маршрутизации на MAC слое (протокол HWMP) и сравнение их с другим протоколом маршрутизации на основе нескольких переходов – AODV, который также может использоваться для создания беспроводных ячеистых сетей в стандартах IEEE 802.11 на сетевом уровне.
Результаты исследования позволят выбрать, когда лучше использовать тот или иной протокол в зависимости от размеров сети и поведения в ней.
Разработка стандарта IEEE 802.11s ведется с 2004 года и до настоящего времени он официально не ратифицирован, последняя вышедшая версия этого стандарта 802.11s/D10 [3], которая описывает топологию сетей и закрепляет использование некоторых протоков. Например, в обязательной для исполнения части IEEE 802.11s в качестве протокола маршрутизации задается гибридный протокол для беспроводных mesh-сетей (HWMP), а в качестве метрики для выбора маршрута – метрика времени передачи по каналу (ALM).
Однако, как будет показано в данном исследовании, обычный счетчик переходов от узла-отправителя к узлу-получателю в некоторых сетях дает лучшие результаты, чем метрика ALM.
555

Таким образом, для беспроводных ячеистых сетей встает проблема выбора протокола маршрутизации, который обеспечит быструю конвергенцию сети и будет всегда находить оптимальные маршруты.
Следующим вопросом, который необходимо рассмотреть, связан с режимами работы HWMP: реактивный и проактивный. Работа в реактивном режиме основана на передаче служебных пакетов от отправителя к получателю для нахождения оптимального маршрута. Протокол AODV построен на том же принципе, но служебные данные передаются на третьем уровне модели OSI (сетевой уровень), вместо второго (канальный) как в HWMP. Является ли использование HWMP лучшим решением для ячеистых беспроводных сетей, чем AODV?
Описание протокола AODV.
Работа данного протокола выглядит следующим образом. Если некоторому узлу-инициатору, требуется передать данные другому узлу, а соответствующий маршрут не известен, то узел инициатор посылает широковещательный запрос RREQ для поиска данного маршрута. Этот запрос передается всем соседям данного узла, которые, в свою очередь, пересылают его своим соседям и так далее. Так как в запросе указана информация об узле инициаторе, то все узлы, получившие данный запрос строят маршруты до узла-инициатора.
На Рис 8 изображена отправка запроса RREQ (пунктирные стрелки) узлом А, который желает узнать маршрут до узла В.
Рис 8. Построение маршрута от А к Б в AODV
При этом один из промежуточных узлов ‒ узел 5 знает необходимый маршрут и отправляет узлу А ответ RREP (сплошные стрелки), он же отправляет еще один «беспричинный» ответ (сплошные стрелки) узлу В, для того, чтобы построился обратный маршрут от узла В к узлу А [2].
Описание HWMP.
Гибридный протокол маршрутизации HWMP использует стандартный набор служебных пакетов, правил их создания и обработки, наподобие AODV. Однако, HWMP адаптирован для работы с адресами MAC уровня и метриками путей. Гибридным он назван потому, что объединяет в себе два режима построения путей, которые могут быть использованы как по отдельности, так и одновременно в одной сети:
556

‒реактивный режим ‒ построение маршрутных таблиц в узлах meshсети непосредственно перед передачей данных ‒ по запросу (рис. 2 слева);
‒проактивный режим ‒ регулярная процедура обновления информации в маршрутных таблицах узлов всей сети. Процедуру инициирует корневой узел, в результате на сети строится граф (дерево) путей с вершиной в корневом узле (рис. 2 справа ).
Рис 9. Реактивный (слева) и проактивный (справа) режим HWMP
Проактивный режим отличается от реактивного тем, что в сети назначается корневой узел (узлы). Этот узел периодически рассылает пакеты RANN, которые распространяются по всей сети. Все узлы сети, принявшие проактивный RANN, сохраняют адрес узла-отправителя (через который лежит путь к корневому узлу), широковещательно транслируют RANN с измененными полями (поля метрики и TTL) и отправляют PREP корневому узлу [1].
Иммитационное моделирование протоколов HWMP и AODV.
Исследование протоколов маршуртизации проводится в программе
Network Simulator 3 (NS-3).
NS-3 [4] – это сетевой симулятор дискретных событий для Интернетсистем, предназначенный преимущественно для исследовательских и образовательных целей. NS-3 является бесплатным программным продуктом (лицензия GNU GPLv2) и общедоступен для исследований.
NS-3 является инструментом моделирования, учитывающим все аспекты построения современных сетей и позволяющим разработчикам изучать интернет-протоколы и крупномасштабные системы в условиях полностью контролируемой среды.
Для сравнения эффективности работы протоколов используется матричная топология (рис. 3) N×M, где N – количество узлов в строке, а M – количество узлов в столбце. Расстояние R между узлами матрицы постоянное.
Обобщенная блок-схема модели, написаной в NS-3, показана на рис. 4.
557
Такая топология позволит более точно сравнить результаты эффективности работы протоколов, чем случайное распределение узлов.
Протоколы маршрутизации также были настроены с идентичными параметрами, чтобы разница в результатах исследования была вызвана только особенностями построения маршрутных таблиц самих протоколов.
Соединения между узлами имеют равномерное распределение с продолжительностью в среднем 30 секунд. Моделирование проводится в течение 300 секунд. Размер передаваемого пакета установлен в 1024 байта, скорость передачи от 50 Кбит/с до 400 Кбит/с.
Результаты исследования.
Входе исследования были получены следующие характеристики для различных размеров сети и скорости передачи:
− Средняя пропускная способность: отношение количества полученных битов к разнице времени получения первого пакета данных и последнего пакета данных.
− Средняя доля доставленных пакетов (PDF): отношение количества принятых пакетов к количеству переданных пакетов.
− Средняя продолжительность задержки: отношение общей продолжительности задержек при передаче всех пакетов к количеству переданных пакетов.
− Средний коэффициент загрузки маршрута: отношение количества служебных пакетов маршрутизации к общему объему переданных пакетов. Значение 1 означает, что объемы загрузки маршрутизации и переданных пакетов совпадают.
PDF и пропускная способность.
Всреднем, HWMP превосходит AODV в сетях 3×3 и 4×4, тогда как в сети 6x6 AODV является наилучшим. В сети 5×5 они имеют одинаковую производительность (рис. 5).
Это происходит потому, что метрика HWMP (ALM) получает худшие метрические значения, когда соединения уже используются или возникают помехи (повышается процент ошибок), и ALM пытается найти другой свободный путь, чтобы избежать столкновений.
На данных графиках приведены результаты исследования HWMP hop count, который является протоколом маршрутизации, работающим на втором уровне, как HWMP, но вместо метрики ALM использует количество переходов, как AODV.
559
Рис. 12. PDF(справа) и пропускная способность (слева) в сетях 3×3 (первый ряд), 4×4 (второй ряд), 5×5 (третий ряд) и 6×6 (четвертый ряд)
560
Таким образом, AODV работает лучше, чем HWMP, по показателям PDF и пропускной способности, когда количество узлов и соединений большое.
Задержка.
В сетях 3×3 и 4×4 разницы практически нет, но в сетях 5×5 и 6×6, AODV приводит к большим задержкам, чем HWMP (до 3 раз). Изменение задержки в зависимости от сети представлено на рис. 6.
Рис. 13. Изменение задержки в различных сетях
В HWMP задержки ниже, потому что 2 уровень контрольных пакетов имеют приоритет перед третьим и могут быть переданы даже при загрузке канала. Исходя из этого, можно решить, что PDF AODV должна быть хуже, чем PDF HWMP. Но HWMP пытается избежать загруженных соединений и в некоторых случаях выбирает слишком длинный путь или вообще не находит маршрут, что снижает PDF.
Коэффициент загрузки маршрутизации.
Увеличение скорости передачи влечет за собой уменьшение PDF. Таким образом, коэффициент загрузки маршрутизации увеличивается, потому что больше потерянных пакетов предполагает необходимость генерировать больше маршрутной информации (рис. 7).
Коэффициент загрузки маршрутизации в HWMP никогда не превышает 0,1 и в лучшем случае может иметь значение 0,005. С другой стороны, минимальное значение, полученное AODV составляет около 0,01, а максимальное может быть почти в 5 раз превышать максимальное значение
HWMP.
561
Рис. 14. Изменение коэффициента загрузки маршрутизации во всех сетях
Такой результат может представлять собой проблему для загруженных сетей, где рост загрузки маршрутизации может привести к еще большим заторам и являться причиной плохой работы протокола AODV.
В данном исследовании было выполнено сравнение протоколов маршрутизации HWMP и AODV, выяснены преимущества и возможности MAC-маршрутизации перед протоколами, работающими с IP уровнем. Результаты показывают, что 2 уровень маршрутизации имеет важное преимущество в условиях задержек и при загрузке каналов маршрутизации. Преимущество увеличивается при возрастании количества узлов и соединений.
Однако, в некоторых ситуациях, например, в сетях размера 6х6 и больше по показателям PDF и пропускной способности, метрика эфирного времени (ALM в HWMP) работает несколько хуже, чем обычный счетчик в AODV. Несмотря на это, можно сделать вывод, что маршрутизация на MAC уровне имеет очевидные преимущества перед обычным 3 уровнем маршрутизации. Эти преимущества должны быть использованы в реальных приложениях.
Список литературы
1.Аблялимова, С.З. Маршрутизация в mesh сетях на основе хаотических радиоимпульсов [Текст] / З.С. Аблямова, Д.М. Уразалиева // IV Всероссийская конференция «Радиолокация и радиосвязь». – ИРЭ РАН. – 2010. – C. 457-461. – Библиогр.: с. 461.
2.Карманов, М.Л. Протокол маршрутизации для ad hoc сетей [Текст] / Л.М. Карманов // Вестник ЮУрГУ Сер. Компьютерные технологии, управление, радиоэлектроника, выпуск 10. – 2009. - № 26. – С. 47-51. – Библиогр.: с. 51.
3.IEEE Draft Standard for Information Technology-Telecommunications and information exchange between systems-Local and metropolitan area networks-Specific requirements-Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) specifications-Amendment 10: Mesh Networking [Текст] / IEEE P802.11sD10.0. – March 2011. – pp. 1-379.
4.NS-3 network simulator: manuals and tutorial for NS-3.-(www.nsnam.org).
562

В. А. Осипов, студент Ижевский государственный технический университет
имени М. Т. Калашникова
Многомерный базис функций Виленкина ‒ Крестенсона
Эффективность решения многих задач цифровой обработки сигналов спектральными методами существенно зависит от используемых систем базисных функций. Как правило, выбор рационального базиса является сложной теоретической и прикладной проблемой. Один из перспективных классов функций для решения задач спектрального анализа дискретных сигналов и изображений – функции Виленкина – Крестенсона, за счет того, что они содержат изменяемый параметр. Одномерный случай этих функций давно известен и рассмотрен в научной литературе. Многомерный же случай изучен не полностью и требует дальнейших исследований, так как его использование может улучшить эффективность решения некоторых задач.
Рассмотрим одномерные базисные функции Виленкина – Крестенсона (ВКФ). Базисная функция системы ВКФ описывается выражением
|
|
|
2 |
n |
|
|
|
i |
k j x j |
|
|
|
|
m |
|
||
|
|
(x) e |
j 1 |
, |
|
|
|
||||
|
|
|
|
|
|
|
k |
|
|
|
|
где m ‒ основание системы счисления; kj ‒ j-й разряд числа k, записанного в позиционной m-ичной системе, n ‒ количество разрядов в m-ичном представлении значения N, которое определяет длину выборочных отсчетов сигнала, причем N = mn [1].
ВКФ имеют различные методы упорядочивания. Переход от одной системы к другой возможен с помощью индикаторных матриц.
Обобщим ВКФ на многомерный случай. Получим следующий вид базисных функций (пусть p ‒ размерность функции):
|
|
|
2 |
n |
|
|
2 |
n p |
|
|
|
|
|
1 |
|
|
|
|
|||
|
|
i |
|
k1 j x1 j |
|
i |
|
|
k p j x p j |
|
k1 …k p |
(x1...xp ) e |
m |
... e |
m |
|
, |
||||
1 |
j 1 |
|
|
p j 1 |
||||||
|
|
|
|
|
|
|||||
то есть в виде мультипликативной функции, где множителями являются ВКФ первого порядка.
Исходя из полученных формул была написана программа, реализующая многомерное дискретное преобразование Фурье в базисе ВКФ.
В матричном виде базисные функции Виленкина – Крестенсона для n- мерного случая можно представить в виде кронекерова произведения матриц для одномерного преобразования. Такое представление возможно только для тех случаев, когда размерности матриц одномерного преобразования совпадают.
Рассмотрим частные случаи.
563
тивного направления. Важно получить вид многомерных функций Виленкина – Крестенсона для общего случая и проверить на практике, какова вычислительная и функциональная эффективность данного класса функций, что является целью дальнейших исследований.
Список литературы
1.Трахтман, А. М. Основы теории дискретных сигналов на конечных интервалах [Текст] / А.М. Трахтман, В.А. Трахтман .-М. : Сов. радио, 1975. – 208 с.
2.Залманзон, Л. А. Преобразования Фурье, Уолша, Хаара и их применение в управлении, связи и других областях [Текст] / Л.А. Заманзон.- М. : Наука, 1989. – 496 с.
3.Даджион, Д. Цифровая обработка многомерных сигналов [Текст] / Д. Даджион , Р. Мерсеро.- М. : Мир, 1987. – 488 с.
4.Дагман, Э.А. Быстрые дискретные ортогональные преобразования [Текст] / Э.А. Дагман, Г.А. Кухарев.- Новосибирск:Наука. Сибирское отделение,1983. – 234 с.
М. А. Петров, магистрант К. Н. Леонов, кандидат технических наук
Ижевский государственный технический университет имени М. Т. Калашникова
Исследование взаимодействия протоколов физического и канального уровней в сетях автоматизированных систем управления зданием
В последние годы автоматизированные системы управления все чаще устанавливаются на объектах индивидуального жилищного строительства. При этом, как правило, преследуется сразу несколько целей: обеспечить сохранность частного имущества, снизить затраты на тепло-, водо- и энергоснабжение, а также получить возможность удаленного управления исполнительными устройствами (например, цепями освещения) и мониторинга их состояния. В данной статье рассматривается специфика передачи данных в сетях таких систем, называемых также АСУЗ – автоматизированными системами управления зданием.
Приведем краткую характеристику основных протоколов, используемых в большинстве проектируемых и действующих АСУЗ: Ethernet, RS485, DMX512.
Стандарты Ethernet [2] определяют параметры электрических сигналов на физическом уровне, а также форматы кадров передаваемых данных на канальном уровне. Наиболее распространенная структура кадра Ethernet представлена на рис. 1.
565
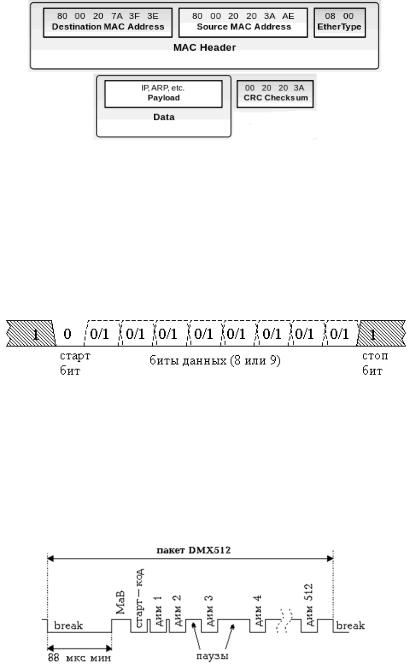
Рис. 1. Формат кадра Ethernet
В первом поле, MAC Header, передается MAC-адрес получателя кадра (6 Байт), MAC-адрес источника (6 Байт) и идентификатор протокола верхнего уровня (2 Байта).
Второе поле кадра служит для передачи полезной нагрузки (от 46 до 1500 Байт), третье – для проверки целостности кадра (4 Байта).
RS-485 (EIA/TIA-485) – один из наиболее распространенных стандартов [3] физического уровня связи. В качестве среды передачи выступает витая пара – два скрученных проводника А и B, информационный сигнал представляет собой разность потенциалов между ними. Сигнал кадра посылки в отдельном проводнике схематично изображен на рис. 2.
Рис. 2. Сигнал кадра стандарта RS-485
Логический ноль передается низким уровнем сигнала, логическая единица – высоким уровнем; старт-биты и стоп-биты служат для отделения информационных посылок друг от друга. Техническая скорость задается контроллером в диапазоне от 2400 до 115200 бод.
На основе стандарта RS-485 организуется передача данных по протоколу канального уровня DMX512 [1]. Область применения данного протокола – передача управляющих сигналов к многоканальным диммирующим устройствам, в частности, к диммерам освещения. Структура пакета DMX512 преставлена на рис. 3.
Рис. 3. Формат пакета DMX512
566
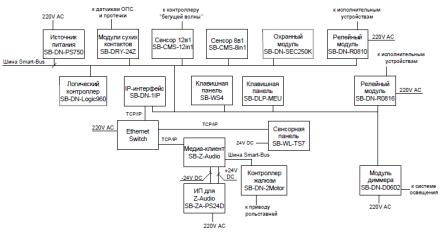
Начало нового пакета обозначается блоком break – двумя нулевыми октетами стандарта RS485 (88 мкс), после чего передаются блок MaB (граница break, 8 мкс), старт-код (один нулевой октет, 44 мкс) и данные каналов (до 512 каналов по 44 мкс).
Помимо указанных, в сетях АСУЗ могут применяться и другие стандарты передачи данных (SPI, RS-232, X10). В модели-прототипе системы, с помощью которого проводилось исследование взаимодействия протоколов, базовым является протокол канального уровня hdl-bus. Данный протокол функционирует «поверх» RS-485 и применяется исключительно для передачи сигналов между контроллерами марки Hdl-bus pro. Структура пакета приведена в таблице.
Таблица Структура пакета протокола hdl-bus
Поле |
Размер |
ID подсети |
ID источ- |
Тип |
Тип ко- |
|
пакета |
источника |
ника |
источника |
манды |
||
|
||||||
Размер |
1 байт |
1 байт |
1 байт |
2 байта |
2 байта |
|
|
|
|
|
|
|
|
Значение |
13-128 |
0-255 |
0-255 |
0-65535 |
0-65535 |
|
|
|
|
|
|
|
|
Поле |
ID подсети |
ID получа- |
Данные |
CRC |
CRC |
|
получателя |
теля |
(команда) |
1 |
2 |
||
|
||||||
Размер |
1 байт |
1 байт |
0-N байт |
1 байт |
1 байт |
|
Значение |
0-255 |
0-255 |
|
|
|
Начало пакета идентифицируется двухбайтным старт-кодом 0xAAAA (43690), который не указан в таблице. Ключевыми являются поля «Тип команды» и «Данные», содержащие управляющую информацию.
Исследование взаимодействия перечисленных протоколов проводилось на модели-прототипе АСУЗ, структурная схема которой изображена на рис. 4.
Рис. 4. Структурная схема модели-прототипа АСУЗ
567
Функционально компоненты системы связаны между собой следующим образом. Логический контроллер и охранный модуль в соответствии со сценариями, задаваемыми в процессе конфигурирования оборудования, передают в сеть hdl-bus (smart-bus) пакеты управления и пакеты с запросами параметров оконечных блоков, а также принимают ответные пакеты. Входами системы служат датчики движения и освещенности SB-CMS-8in1, клавишные панели и модуль дискретных входов SB-DRY-24z. В качестве выходов системы выступают блоки реле SB-DN-R0810 и SB-DN-R0816, диммер SB-DN-D0602, а также контроллер SB-DN-2Motor. Для наблюдения за текущим состоянием входов системы и задания параметров работы применяется интерфейсная сенсорная панель SB-WL-TS7.
Отметим, что в действующей АСУЗ, представляющую собой расширенный вариант модели-прототипа, также используется DMX-контроллер SB-DN- 48DMX, осуществляющий преобразование пакетов hdl-bus в кадры стандарта DMX512 путем извлечения данных об уровнях каналов и замены заголовков пакетов.
Соединение отдельных участков сети hdl-bus с сенсорной панелью и компьютером, используемым для настройки, осуществляется посредством сети Ethernet через преобразователи протоколов hdl-bus/Ethernet и сетевой коммутатор. Данные преобразователи протоколов могут быть использованы для передачи пакетов через сеть Интернет, что позволяет осуществлять удаленное управление и мониторинг состояния системы.
Для корректной передачи пакетов по различным протоколам составлены две схемы адресации: первая – для сети Ethernet (ip-адреса, расположенные в одной подсети 192.168.10.0/24), вторая – для сети hdl-bus (DeviceID с указанием
SubnetID=1).
В ходе исследования рассматривалось два аспекта передачи данных в сетях АСУЗ. Прежде всего эмпирическим путем была выявлена зависимость времени отклика компонентов системы от частоты посылки запросов их текущих параметров. Для этого проводились серии из 20 измерений по каждому из следующих значений периодичности поступления запросов: 50, 100, 250, 500, 750 и 1000 мс. В качестве опрашиваемых блоков были выбраны медиаклиент SB-Z- Audio, датчик температуры на панели SB-DLP-MEU, модуль дискретных входов SB-DRY-24z и модуль диммирования SB-DN-D0602. Время отклика замерялось для блока релейных выходов SB-DN-R0816 и модуля дискретных входов; его пороговое значение было условно задано равным 1000 мс. Результаты экспериментов показали, что пороговое значение быстродействия системы превышается при частоте посылки запросов большей, чем один раз в 250 мс. Полученная зависимость представлена на рис. 5.
568
 SB-DRY-24Z SB-DN-R0816
SB-DRY-24Z SB-DN-R0816М. Н. Пудова, магистрант
А. Н. Зямбахтина, магистрант
О. В. Пономарева, кандидат технических наук, доцент Ижевский государственный технический университет имени М. Т. Калашникова
Виртуальный прибор для анализа электроэнцефалограмм
Метод ЭЭГ (электроэнцефалограмм) перспективен и показателен, что позволяет рассматривать его в области диагностики психических расстройств. Применение математических методов анализа ЭЭГ и внедрение их в практику позволяет автоматизировать и упростить работу врачей. ЭЭГ является составной частью объективных критериев течения исследуемой болезни в общей системе оценок, разработанных для персонального компьютера.
ЭЭГ ‒ метод регистрации электрической активности (биопотенциалов) головного мозга через неповрежденные покровы головы, позволяющий судить о его физиологической зрелости, функциональном состоянии, наличии очаговых поражений, общемозговых расстройств и их характере.
Характер ЭЭГ определяется функциональным состоянием нервной ткани, а также протекающими в ней обменными процессами. Нарушение кровоснабжения приводит к подавлению биоэлектрической активности коры больших полушарий. Важной особенностью ЭЭГ является ее спонтанный характер и автономность. Электрическая активность мозга может быть зафиксирована не только в период бодрствования, но и во время сна. Даже при глубокой коме и наркозе наблюдается особая характерная картина ритмических процессов (волн ЭЭГ). В электроэнцефалографии различают пять основных диапазона: альфа ритм (ν = 8‒13 Гц, А = 50‒100 мВ); бета-ритм (ν = 14‒30 Гц, А = 10‒20 мкВ); гамма-ритм (ν >31 Гц, А мала); тэта-ритм (ν = 4‒7 Гц, А мала); дельта-ритм (ν = 1,5‒3 Гц, А мала) [3].
В настоящее время все более широкое распространение получает компьютерная электроэнцефалография (КЭЭ). Одной из важнейших задач в области КЭЭ является задача отображения карты электрических потенциалов мозга пациента (ЮПМ) в режиме реального времени на экране персонального компьютера (ПК).
Задача построения динамической КЭПМ формулируется следующим образом: дать оценку мощности сигнала в каждом из опрашиваемых каналов в полосе частот, соответствующей одному из принятых диапазонов (1‒3 Гц, 4‒8 Гц, 8‒12 Гц, 13‒20 Гц), сформировать изображение путем интерполяции полученных данных на пространственную сетку, соответствующую расположению датчиков на голове пациента, вывести изображение на экран ПК. Одним из наиболее перспективных программных обеспечений для анализа сигналов является LabVIEW.
570
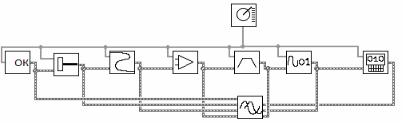
В последних версиях LabVIEW имеется очень удобный инструмент для разработки приложений ‒ интерактивные виртуальные экспрессприборы (Экспресс-ВП), представляющие собой готовые модули (фактически – подпрограммы), предназначенные для обработки и анализа данных для большинства типичных измерительных и испытательных приложений. Экспресс-ВП разделены по тематике и обеспечивают моментальный доступ к более чем 400 различным функциям анализа и обработки сигналов, содержащимся в LabVIEW.
Процесс разработки ВП включает:
1.Размещение регуляторов и индикаторов на передней панели ВП.
2.Добавление требуемых для прикладной задачи структур и функций на функциональной панели.
3.Соединение регуляторов, индикаторов, констант, функций и др. на функциональной панели при помощи проводки.
Особенно актуально использование технологии LabVIEW в функциональной диагностике в связи с необходимостью концентрации финансовоемкой диагностической измерительной техники в учреждениях здравоохранения. Стоимость специализированного медицинского диагностического оборудования постоянно растет, при одновременном снижении цен
ипопуляризации компьютеров. Применение технологии LabVIEW позволит разработчикам использовать эти обстоятельства в интересах здоровья людей.
Используя известные принципы построения электроэнцефалографов [1], представим структурную схему виртуального прибора для сбора ЭЭГ данных в следующем виде (рис. 1).
Рис. 1. Структурная схема виртуального прибора для сбора ЭЭГ данных
Она состоит из следующих блоков (слева направо): блока пациента, который играет роль источника сигналов; набора электродов, которые играют роль проводников биологического электричества от коры головного мозга к блокам регистрации и обработки; соединительных линий, кабелей, передающих сигнал от пациента к блоку обработки; усилителя, фильтра, АЦП, блока обработки сигнала, обычно компьютера. В схеме также присутствует панель управления (вверху), на которой присутствуют варианты управления характеристиками и панель визуализации (внизу), на которой отображается сигнал.
571
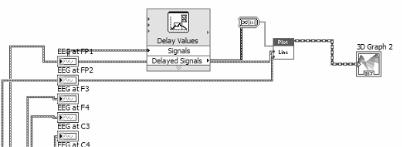
На рис. 2 показан фрагмент схемы с блоком, предназначенным для графического отображения 3D аттрактора сигнала. При реконструкции n- мерного аттрактора в 3х-мерном пространстве по одной оси откладывается сигнал, по другой сигнал с задержкой t, по третей – сигнал с задержкой 2t. Этот механизм реализован на схеме рис. 2.
Рис. 2. Фрагмент схемы базы данных ЭЭГ сигнала
Он состоит из блока задержки, блока выбора вида задержанного сигнала и блока отображения трехмерного графика.
Каждая фаза моделируется в виде отдельного функционального узла, воспроизводящего моделируемый процесс, в том числе и процессы, имитирующие воздействие случайных внешних и внутренних факторов, влияющих на результаты измерительного эксперимента в реальных условиях. Каждый такой узел (или группа узлов) средствами программного пакета LabVIEW воспроизводится на экране монитора в виде некоторого физического устройства, изображение которого близко к реальному исполнению объектов эксперимента, в том числе и реальным измерительным средствам, с указанием необходимых органов управления. В дальнейшем разработанные модели объединяются в измерительные схемы, соответствующие моделируемому измерительному процессу [2].
Такой подход к моделированию измерительных процессов обладает высокой гибкостью и позволяет воспроизводить измерительный процесс с требуемой глубиной, а визуализация измерительных средств и объектов эксперимента со свободным доступом к органам управления и настройки позволяет осуществлять управление измерительным процессом без вмешательства в тело программы.
|
Список литературы |
|
|
|
1. Зенков, Л.Р. |
Клиническая |
электроэнцефалография |
(с |
элемента- |
ми эпилептологии) [Текст] / Л.Р. Зенков. – Таганрог: Издательство ТРТУ. – 1996. –
358с.
2.Кузнецов, С.П. Динамический хаос [Текст]: курс лекций /С.П. Кузнецов – М.: Физматлит, 2001. – 295 с.
3.Крамаренко, А.В. Электроэнцефалограмма. Анализ с точки зрения теории информации / А.В. Крамаренко. –2002.-(http://www.dxtelemedicine.com/rus/ publications/analise_eeg.htm)
572

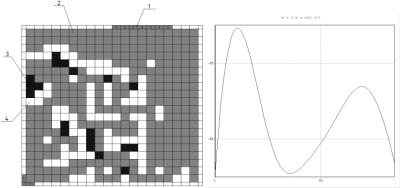
а |
б |
Рис.1. Фрактальный элемент: а – вид на резистивный слой (2) и контактные площадки (1); б – ФЧХ с с = -33,5 1
На рис. 1 введены следующие обозначения: 2 конечный элемент (КЭ) со структурой слоев вида R-C-0 (резистивный слой – диэлектрик - идеальный проводник), 3 КЭ со структурой слоев вида R, 4КЭ с удаленным резистивным слоем (0-слой).
Недостатком программы RCWorkbench является низкая скорость сходимости ГА вблизи оптимума целевой функции. Однако использование в этой области классических методов многопараметрической оптимизации в данном случае невозможно из-за огромного числа оптимизируемых переменных, равном числу КЭ, на которые разбивается поверхность RC-ЭРП.
Целью данной работы является поиск критерия оптимизации, который бы позволил ввести в ГА некоторую стратегию выбора мест выполнения генетических операторов (скрещивания и мутации) в области определения варьируемых параметров на заключительных стадиях оптимизации. Это, на наш взгляд, позволило бы существенно ускорить работу ГА.
В[5] показано, что формирование топологии контактных площадок или топологии резистивного слоя в пленочных RC-ЭРП в виде регулярных фракталов с известной фрактальной размерностью, позволяет создавать фрактальные элементы с соответствующим данной фрактальной размерности участком постоянной фазы в ограниченном диапазоне частот.
Вчастности, показано, что выполнение контактных площадок к резистивному слою RC-ЭРП в виде стержней Кантора с фрактальной размерностью D = 1,71 позволяет создать фрактальный элемент, ФЧХ импеданса
которого имеет постоянство фазового сдвига на уровне φс = –51,912°. Следовательно, показатель α = θс/90° = 51,912°/90° = 0,5768. Если учесть,
что между фрактальной размерностью и показателем существует связь α = 1/D [6], которая в данном случае с погрешностью 1,4% выполняется, то таким критерием оптимизации ГА могла бы стать фрактальная размерность топологии RC-ЭРП.
574
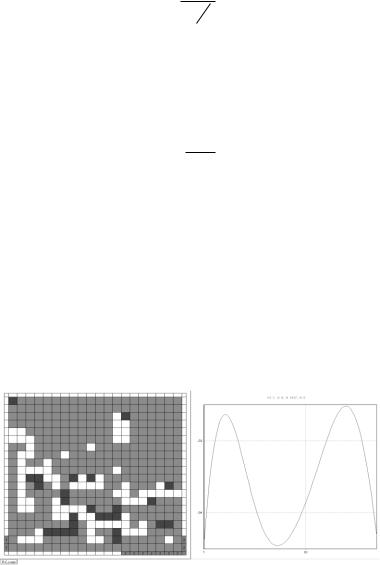
Изменим критерий синтеза, взяв требуемый уровень постоянства ФЧХ импеданса фрактального элемента с = -39,5. Синтезированная топология и реализованная ФЧХ изображены на рис. 3. Используя (5) для данной топологии получим: L = 223, S = 108, D = 2,31, = 0,4329, что соответствует уровню постоянства фазы ФЧХ импеданса фрактального элементас = 38,96. Это также не соответствует заданному уровню постоянства фазы. Однако изменение рассчитанных фрактальных размерностей хорошо коррелирует с изменением уровня постоянства фаз ФЧХ импедансов, реализуемых синтезированными фрактальными элементами. Так с увеличением уровня постоянства фазы, хоть и не значительно, но растет коэффициент .
а |
б |
Рис.3. Фрактальный элемент: а – вид на резистивный слой и контактные площадки; б – ФЧХ с с = ‒39,5 1
Отличие рассчитанных фрактальных размерностей по формуле (5) от реализованных фрактальных размерностей синтезированных фрактальных импедансов можно объяснить тем, что формула не отражает особенности конструкции RC-ЭРП, в которой наряду с КЭ со структурой слоев RC0 присутствуют КЭ со структурой R. Кроме того не учтено влияние контактных площадок, граничащих с КЭ по периферии резистивного слоя.
Однако наличие корреляции между рассчитанными значениями фрактальных размерностей с изменением уровня постоянства фаз ФЧХ импедансов, реализуемых синтезированными фрактальными элементами, позволяет заключить, что разницу в оценках можно устранить, усовершенствовав методику определения фрактальной размерности конструкции RC-ЭРП как случайного фрактала особого класса.
Список литературы
1. Ушаков, П.А. Методы анализа и синтеза многослойных неоднородных RCэлементов с распределенными параметрами и устройств на их основе [Текст]: автореф. дисс…. доктора техн. наук /П.А. Ушаков.- Казань: КГТУ, 2009. – 35 с.
576
2.Потапов, А.А. Системные принципы и элементная база фрактальной радиоэлектроники. Ч II. Методы синтеза, модели и перспективы применения [Текст]/ А.А. Потапов, А.Х. Гильмутдинов, П.А. Ушаков // Радиотехника и электроника. – 2008. – Т. 53.- №11.- С. 1347-1394.
3.Oldham, K.B. The Fractional Calculus [Текст]/ K.B. Oldham, J. Spanier// New York: Academic Press, 1974. -234 с.
4.Программа синтеза конструкции резистивно-емкостных элементов с распределенными параметрами [Текст]: свидетельство о государственной регистрации программы для ЭВМ № 2010612900. /Филиппов А.В., Ушаков П.А., Красноперов К.В.; зарегистрировано в Реестре программ для ЭВМ 20.04.2010.
5.Ушаков, П.А. Распределенные резистивно-емкостные элементы с фрактальной размерностью: конструкции, анализ, синтез и применение [Текст]/ П.А. Ушаков, А.Х. Гильмутдинов, В.А. Мокляков // Нелинейный мир, 2007.-Т. 5. -№ 10-11.- С. 633-638.
6.Le Mehante, A. Fractal electrodes and constant phase angle response [Текст]/ A. Le Mehante // Solid State Ionics, 1977.- V.25.- P.99-100
7.Чумак, О.В. Энтропии и фракталы в анализе данных [Текст] /О.В. Чумак. – М. – Ижевск: НИЦ «Регулярная и хаотическая динамика», 2012. – 168 с.
В. Д. Стерхов, магистрант; Р. Ф. Зарипов, магистрант О. В. Муравьева, доктор технических наук, профессор В. А. Стрижак, кандидат технических наук, доцент Ижевский государственный технический университет
имени М. Т. Калашникова
Контроль отклонений в геометрии сечения прутка электромагнитно-акустическим методом
Прутковый прокат, часто применяемый как заготовка для более сложных конструкций, в процессе производства проходит множество технологических циклов, при этом сечение прутка может деформироваться на протяжении всей его длины. Изменение сечения прутка не является равномерным для всей его длины, таким образом, пруток может иметь по сечению формы, отличные от круга.
Одним из подходов к решению задач измерения отклонения геометрии пруткового проката и изделий из него является использование бесконтактного электромагнитно-акустического метода (ЭМА) с применением объемных поперечных волн. Для определения изменения сечения в прутках использовался метод многократных отражений с использованием ЭМА преобразования [1].
ЭМА преобразователь спроектирован таким образом, что возбуждаемая проходной катушкой-индуктором поперечная волна, проходит по всем диаметрам (по сечению) объекта контроля и регистрирует как наличие дефектов типа несплошности, так и отклонения в геометрии и структуре участка находящегося под преобразователем. Схемы хода ультразву-
577
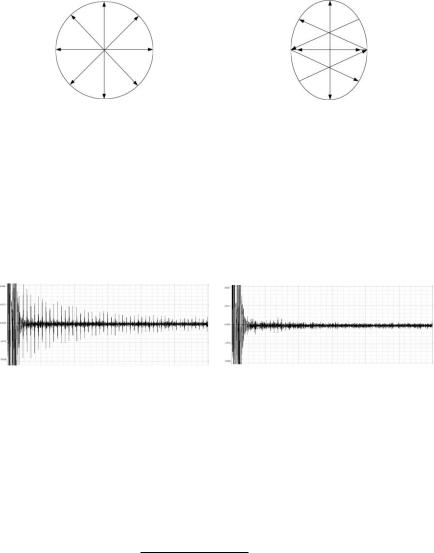
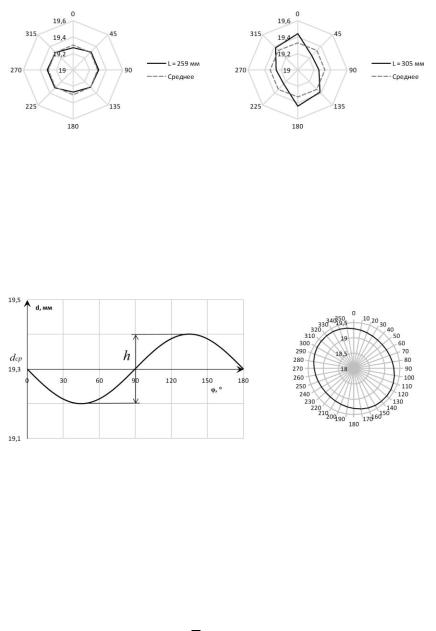
а) |
б) |
Рис. 3. Индикатриса диаметров прутка
По всей длине прутка было выделено 18 наиболее типичных эхограмм, включая годные и бракованные участки. Разделение результатов измерений на годные и бракованные участки прутка производилось следующим образом: условно годная эхограмма (количество различимых импульсов больше 15), среднее значение Ns < 0,5 %. Для эхограмм содержащих менее 15 различимых отражений – Ns > 0,5 %.
а) |
б) |
Рис. 4. Модель овальности сечения прутка
В программной оболочке MathCAD выполнено моделирование серии импульсов многократных отражений при прозвучивании прутков поперечными волнами. На рис. 4 представлено заложенное в модель угловое распределение по диаметру в сечении прутка, изменяющееся по закону синуса и соответствующая этому распределению угловая индикатриса по диаметру. Моделирование базируется на принципе численной суперпозиции волн, идущих из каждого элемента периметра и принятых противоположным элементом. Модель описывается формулой:
U D |
1 U n Di , |
(2) |
|
k |
|
k i 1
579
где UΣ(D) – моделируемая серия импульсов, U(nDi) – импульс от отдельного элемента, прошедший расстояние Di, k – число элементов суммирования (в эксперименте k = 18), n – число отражений.
Di |
Dср h sin , |
(3) |
где Dср – средний диаметр по сечению, h – абсолютное отклонение, θ – угол, при котором измерен диаметр.
Зондирующий импульс задается формулой: |
|
P t P0 e t sin 2 ft , |
(4) |
где β – коэффициент затухания, пропорциональный частоте f, P0 – амплитуда зондирующего импульса.
Основные входные данные модели: Ct = 3200 м/с – скорость распространения поперечной волны, f = 2 МГц – частота ЗИ, N = 14 – разрядность БПФ. Модель не учитывает такие явления как прозрачность и отражение, затухание и расхождение. Модель ЗИ представлена на рис. 5.
Рис. 5. Модель зондирующего импульса
Рис. 6. Модель эхограммы для h = 0,1 мм и h = 0,4 мм
580
Результаты моделирования при h = 0,1 мм и h =0,4 мм представлены на рис. 6.
Проведенные теоретические и экспериментальные исследования по влиянию отклонения диаметра на основные параметры эхограммы многократных отражений показывают возможность точной оценки отклонения по диаметры (0,1 мм) с помощью бесконтактного ЭМА метода с использованием объемных волн.
Работа выполнена при поддержке Программы стратегического развития Ижевского государственного технического университета им. М.Т.Калашникова
на 2012-2016 годы (ПСР/М2/Н2.5/МВВ).
Список литературы
1. Муравьев, В.В. Контроль качества термической обработки прутков из стали 60С2А электромагнитно-акустическим методом [Текст]/ В.В.Муравьев, О.В. Муравьева, Е.Н. Кокорина // Дефектоскопия, 2012. -№1 – С.20 – 32.
В. Д. Стерхов, магистрант
К. В. Петров, студент
О. В. Муравьева, доктор технических наук, профессор Ижевский государственный технический университет имени М. Т. Калашникова
Влияние местоположения индуктора проходного электромагнитноакустического преобразователя
на его акустическую помехозащищенность
При определенных условиях наряду с основным типом волн ультразвуковой преобразователь может излучать и другие (нежелательные) типы волн [1]. Излучая сразу несколько типов волн, такой преобразователь может фиксировать один и тот же дефект несколько раз, что может привести к перебраковке какого-либо изделия. Для исключения многократной индикации одного и того же дефекта при проектировании ультразвуковых преобразователей необходимо рассчитывать акустические поля как полезного так и нежелательного типов волн. Отношение амплитуды основных волн к амплитуде нежелательных волн называют акустической помехозащищенностью.
Электромагнитно-акустический (ЭМА) преобразователь позволяет возбуждать и принимать в объекте контроля, как продольные, так и поперечные волны по нормали к поверхности. Для того, чтобы ЭМА преобразователь излучал преимущественно один (основной) тип волны, при его проектировании необходимо учитывать ряд факторов, основным из которых является взаимное расположение направления индуцируемых в объ-
581
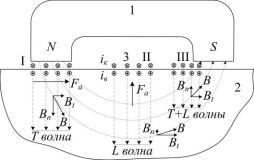
екте контроля вихревых токов и силовых линий постоянного магнитного поля (поля подмагничивания).
На рис. 1 представлена схема возбуждения продольных и поперечных волн ЭМА преобразователем. Магнит 1 создает в объекте контроля 2 по-
стоянное магнитное поле, силовые линии которого замыкаются определенным образом. Суммарный вектор индукции магнитного поля В рас-
кладывается на нормальную Bn и тангенциальную Bt составляющие таким образом, что вблизи полюсов магнита максимальное значение имеет нормальная составляющая, а в центре между полюсами максимальна тангенциальная составляющая магнитного поля. Вихревые токи iв, индуцируемые индуктором 3, взаимодействуя с постоянным магнитным полем, приводят к появлению силы Ампера Fa, которая в свою очередь вызывает механические смещения частиц в объекте контроля.
Рис. 15. Возбуждение поперечных T и продольных L волн ЭМА преобразователем (B ‒ результирующая индукция магнитного поля, Bn ‒ нормальная составляющая, Bt ‒ тангенциальная составляющая, Fa ‒ сила Ампера,
iв ‒ вихревые токи, iк ‒ ток индуктора)
Таким образом, если размесить индуктор вблизи полюсов магнита (положение I), то будет излучаться преимущественно поперечная волна T, если между полюсами (положение II) ‒ преимущественно продольная L. Размещение индуктора в зоне, где тангенциальная и нормальная составляющие магнитной индукции равны (Bn=Bt) или сопоставимы (положение III), возможно излучение как продольных, так и поперечных волн в большей или меньшей степени в зависимости от соотношения нормальной и тангенциальной составляющих магнитной индукции.
В данной работе рассмотрены вопросы акустической помехозащищенности проходного ЭМА преобразователя поперечных волн радиальных направлений по сечению, используемого для контроля цилиндрических объектов теневым метом многократных отражений [2]. Принцип действия такого преобразователя показан на рис. 2, а. Мешающей для такого ЭМА преобразователя является продольная волна, появление которой на многократных отражениях можно ошибочно интерпретировать как наличие дефектов в изделии.
Для оценки соотношения амплитуд основного T и нежелательного L типов волн и закономерностей их появления в зависимости от местопо-
582
ложения высокочастотного индуктора необходимо определить соотношение нормальной и тангенциальной составляющих магнитной индукции в зоне действия вихревых токов.
С этой целью методом конечных элементов была смоделирована система подмагничивания проходного ЭМА преобразователя поперечных волн [3], схематически представленная на рис. 2, б. Графики напряженности нормальной и тангенциальной составляющих магнитного поля вдоль координаты на поверхности объекта, полученные в ходе моделирования представлены на рис. 3.
 а)
а)
б)
Рис. 2. Принцип действия проходных ЭМА преобразователей поперечных волн радиальных направлений по сечению (а), модель поля подмагничивания (б)
Видно, что строго по центру системы подмагничивания х=0 нормальная Bn компонента магнитного поля (отвечает за излучение поперечных волн) имеет максимальное значение, уменьшаясь от 1,8 Т при х=0 мм до 0 при х=7,5 мм, далее меняет знак на противоположный и увеличивается до значения 0,7 Т по модулю. При этом тангенциальная компонента Bt магнитного поля при х=0 имеет нулевое значение, в зоне х>0 наблюдается положительный экстремум при х=6,5 мм, соответствующий значению Bt=1,5 Т. Аналогичный отрицательный экстремум наблюдается в зоне
х<0.
Таким образом, размеры и расположение высокочастотного индуктора по координате х существенно влияют как на эффективность излучения основного типа волн, так и на возможность появления продольной волны мешающего типа.
583


а |
б |
Рис. 5. Эхограмма многократных отражений при х=0 мм (а) и х=8 мм (б)
Результирующий график зависимости отношения амплитуды поперечной Ut к амплитуде продольной Ul волн от величины смещения индуктора x представлен на рис. 6. Согласно рис.6 даже незначительное смещение индуктора (на 2 мм) уже приводит к возникновению мешающей волны по амплитуде в 8 раз меньше поперечной. Изменение положения индуктора относительно центра до 5 мм ухудшает его помехозащищенность до 4.
Рис. 6. График зависимости отношения Ut /Ul от величины смещения x
Приведенные в статье результаты теоретических и экспериментальных исследований показывают необходимость строгого позиционирования индуктора относительно системы подмагничивания и выбора его размера для достижения максимальной акустической помехозащищенности проходного ЭМА преобразователя при контроле цилиндрических объектов.
Работа выполнена при поддержке Программы стратегического развития Ижевского государственного технического университета имени М. Т. Калашникова на 2012 – 2016 годы (ПСР/М2/Н2.5/МВВ).
585
Список литературы
1.Буденков, Г.А. Динамические задачи теории упругости в приложении к проблемам акустического контроля и диагностики [Текст]/ Г.А. Буденков, О.В. Недзвецкая.- М.: Изд-во «Физико-математической литературы», 2004. – 136 с.
2.Муравьев, В.В. Контроль качества термической обработки прутков из стали 60С2А электромагнитно-акустическим методом [Текст]/ В.В. Муравьев, О.В. Муравьева, Е.Н. Кокорина // Дефектоскопия, №1, 2012. – с.20 – 32.
3.Муравьева, О.В. Моделирование систем подмагничивания электромагнитноакустических преобразователей объемных волн для контроля пруткового проката
[Текст] // О.В. Муравьева, Е.Н. Кокорина, В.Д. Стерхов, Д.В. Малютин // Приборостроение в XXI веке - 2011. Интеграция науки, образования и производства: Сб. материалов VII Всероссийской научно-технической конференции с международным участием (Ижевск, 2011 г.). – Ижевск: Изд-во ИжГТУ, 2012. – С. 198-202.
А. В. Чунаев, аспирант Ижевский государственный технический университет
имени М. Т. Калашникова
Программная реализация алгоритма FEC прикладного уровня для передачи потоковых данных
Передача потоковых данных занимается все большее место в области телекоммуникаций. Передача потоковых данных по сетям ЭВМ применяется при мультимедийных конференциях, видеотрансляциях, передачи голоса, видеонаблюдении и других мультимедийных приложениях реального времени. При этом существует проблема обеспечения необходимого качества передачи для восприятия передаваемой аудио/видеоинформации [1]. Для повышения качества передачи могут применяться на разных уровнях модели взаимодействия открытых систем различные методы коррекции ошибок. В данной работе рассматривается FEC (Forward Error Correction – прямая коррекция ошибок), реализованная программно на прикладном уровне.
Пакеты в алгоритме FEC прикладного уровня составляются в блоки. Блок состоит из R избыточных и K информационных пакетов. Избыточные пакеты внутри блока могут восстановить до R, включительно, любых информационных пакетов внутри блока. Увеличение избыточных пакетов приводит к увеличению вычислительных ресурсов необходимых для восстановления информационных пакетов. Поэтому величина R не должна быть большой и была установлена равной 4. Одной из основных характеристик кода является его скорость, которая в нашем случае равна K/(K+R). Чем выше скорость кода, тем менее дополнительное потребление пропускной способности из-за избыточных пакетов. С другой стороны, чем ниже скорость кода, тем больше вероятность восстановления информаци-
586
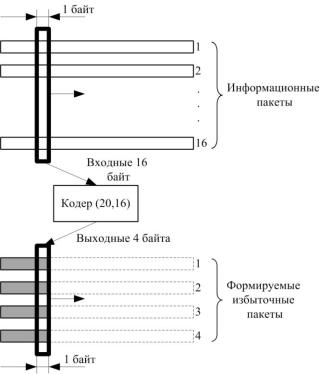
онных пакетов. Поэтому, исходя из скорости кода, величина K установлена равной 16. Кодом, с помощью которого можно построить такой блок, может служить код Рида-Соломона (32,28) укороченный до кода (20, 16). Однако символы этого кода имеют 5-битные значения. Так как предполагается программная реализация, то в этом случае удобнее оперировать 8- битными величинами, т. е. байтами. Поэтому для укорачивания до (20,16) был выбран код Рида-Соломона (256,252), который более далек по отношению к укороченному коду, чем код Рида-Соломона (32,28). На рис. 1 представлена схема получения избыточных пакетов для информационных пакетов с помощью кодера Рида-Солона (20,16).
Рис. 1. Формирование избыточных пакетов
Для функционирования этого алгоритма необходимо 2 буфера. Один - на сервере для хранения тех пакетов, на основе которых будут получены избыточные, другой ‒ на клиентской стороне для задержки пакетов перед подачей на приложение, в течение которой все необходимые для декодирования пакеты будут получены. Длина буфера сервера равна K, а буфера клиента K+R+l, некоторое задаваемое l добавляется для борьбы с джиттером. На рис. 2 приведены форматы сообщений, а на рис. 3 – блок-схемы алгоритмов для сервера и клиента. PNBN+1 на рис. 3б означает порядковый
587
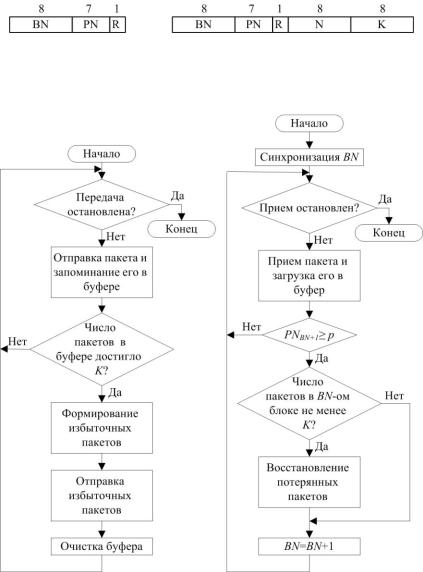
номер принятого пакета из (BN+1)-го блока, а величина p – некоторая задаваемая величина, которая должна быть менее l. Условие PNBN+1≥p поставлено для борьбы с джиттером.
Работа алгоритма была исследована при передаче видеопотока через канал связи подверженный ошибкам.
а) б)
Рис. 2. Форматы сообщений FEC прикладного уровня для а) информационного б) избыточного пакета: BN – номер блока, PN – номер пакета внутри блока, R – флаг избыточного пакета, N – общее число пакетов внутри блока, K – число информационных пакетов внутри блока
а) б)
Рис. 3. Алгоритм FEC прикладного уровня для а) сервера б) клиента
588

для достижения наибольшей эффективности предполагается данный алгоритм объединить с алгоритмом автоматического запроса повторной передачи.
Список литературы
1.Чунаев, А.В. Влияние характеристик передачи потоковых данных на качество видео в WLAN [Текст] / А.В. Чунаев, А.В. Абилов, А.И. Нистюк // T-Comm – Телекоммуникации и транспорт. – М.: Издательский дом Медиа Паблишер. – 2012
–№5.
2.VideoLAN // VLC: Official site.-(http://www.videolan.org)
3.YUV CIF reference videos // Telecommunication Networks Group: сайт. – URL: http://www2.tkn.tu-berlin.de/research/evalvid/cif.html (дата обращения: 4.02.2013).
4.Network performance objectives for IP-based services // ITU-T Rec. Y.1541. – 2011. – 57 p.
М. В. Якимов, аспирант К. А. Андрюшаев, магистрант
Г. В. Ломаев, доктор технических наук, профессор Ижевский государственный технический университет имени М. Т. Калашникова
Влияние магнитных бурь на процесс направленного бурения наклонных и горизонтальных скважин, возможность аппаратного выявления помехи от магнитных бурь
Жизнь в современном мире полностью зависит от достижений научно технической революции – машин и различных механизмов, и подчинена использованию энергоносителей. Наиболее распространѐнными и доступными из энергоносителей являются нефть и газ, и с каждым годом потребность человечества в них возрастает, что диктует необходимость ускоренного темпа разработки новых и старых месторождений и добычи нефти и газа. Реальность такова, что на данный момент стало не выгодно бурить вертикальные скважины для добычи нефти и газа, так как они охватывают малый объѐм продуктивного пласта, что не позволяет в полной мере добыть залегающие в породах нефть и газ. К тому же стоимость строительства наклонной скважины, с развитием технологии бурения, приближается к стоимости вертикальной.
Для бурения наклонно направленных и горизонтальных скважин необходимо обладать телеметрическим забойным оборудованием, которое в реальном времени предоставляет технологу по бурению информацию о зенитном угле и азимуте на забое в точке замера, что и позволяет понять, в каком направлении в данный момент ведѐтся бурение рис. 1 и какие нужны корректировки, чтобы соответствовать плановой траектории.
590
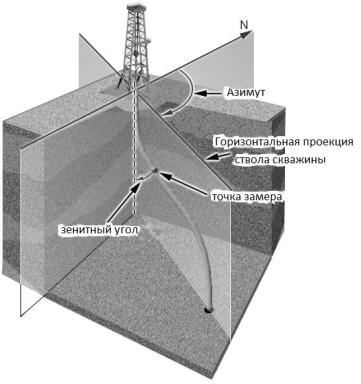
Рис. 1. Зенитный угол и азимут
Все данные об ориентации инструмента предоставляет специальный блок телесистемы, который называется инклинометрический зонд [1]. Внутри него содержатся три взаимно ортогональных акселерометра и три взаимно ортогональных магнитометра, зная показания акселерометров, можно вычислить зенитный угол, а зная показания магнитометров, рассчитывается азимут. В расчѐте азимута участвуют также и показания акселерометров.
Для оценки правильности измерения магнитных составляющих геомагнитного поля существует критерий сравнения, рассчитывается величина геомагнитного поля по показаниям трѐх магнитометров и сравнивается с величиной магнитного поля Земли рассчитанного по специальной ежегодно обновляемой модели, учитывающей ежегодное смещение полюсов Земли. Азимут считается корректным, если точны вычисления зенитного угла и измеренное значение геомагнитного поля для данных координат отличается не более чем на ±350 нТл от значения магнитного поля вычисленного программой для этих же координат.
591
В процессе бурения зачастую получается так, что измеренная величина магнитного поля Земли выбивается за рамки поля вычисленного программой, и проведение повторного замера даѐт такие же результаты. Такой замер считается некорректным и его нельзя использовать при расчѐтах траектории. Необходимо добиться точного результата измерений, установив тем самым происхождение помехи на забое, либо не было полного покоя телесистемы в процессе замера, или помехой стала другая причина, например магнитная буря. Магнитная буря бывает в диапазоне
±500 нТл [2].
На сегодняшний день, на буровой площадке нет такой возможности, чтоб моментально точно установить есть магнитная буря или нет, поэтому в возникающих случаях порой приходится ждать около трѐх часов, чтоб информация о пришедших магнитных бурях, которую предоставляют специальные обсерватории, дошла до работников. И только тогда становится возможным понять, связана ли причина помех с возникшей магнитной бурей.
Процесс бурения очень затратный, и длительный простой оборудования недопустим, поэтому когда не получается снять замер из-за того, что критерий по магнитному полю Земли выбивается за рамки допуска, часто принимается решение о полном подъѐме инструмента с целью выявления и устранения причины, например замены инклинометрического зонда телесистемы на запасной, в то время как причиной явилась магнитная буря. Хотя если бы был на буровой площадке прибор, который давал бы информацию о наличии и отсутствии магнитных бурь, то можно было бы избежать многих незапланированных подъѐмов инструмента и, как следствие избежать потери времени и больших денежных затрат.
Для решения данной проблемы необходимо разработать специальный прибор, который предоставлял бы точные показания в условиях электромагнитных помех от бурового оборудования, линий электропередачи и питающих подстанций, и позволял прогнозировать магнитные бури.
Для достижения поставленной цели необходимо решить следующие задачи:
1)изготовление опытного образца прибора, который не будет реагировать на внешние факторы среды, а будет лишь фиксировать возникновение магнитной бури с высокой точностью;
2)выявление негативного воздействия, устранение причин их возникновения и последующая модернизация оборудования.
Основным ожидаемым результатом нашей работы является разработка прибора, определяющего магнитную бурю в условиях большого уровня техногенных электромагнитных помех. Накопленная в течение длительного времени информация, поступающая с датчиков, устраняющих помехи, позволит получить точную классификацию помех на буровой площадке, что в свою очередь послужит выявлению негативных причин воздействия окружающей среды. Наши исследования дадут нам возможность
592
предупреждения о сбоях техники (навигационного оборудования, телеметрического оборудования), выходе из строя электросетей.
Данная информация поможет понять, в чѐм причина некорректных результатов при замере телесистемы. И будет принято верное решение о том, что нет необходимости в подъѐме инструмента, а нужно всего лишь переждать возмущения, вызванные геомагнитной бурей.
Список литературы
1.Булатов А.И. [Текст] / А.И. Булатов, В.И. Демихов, П.П. Макаренко. - M.: Недра: Контроль процесса бурения нефтяных и газовых скважин, 1998. – 345 с.
2.Магнитная и метеорологическая обсерватория Павловск-Воейково – Л.: Гидрометеоиздат: 1978. – 22 с.
593