

введение в тфп
.pdfПриложение 1 |
151 |
151 |
между этими волнами. Сравнение уравнений (11) и (16) показывает, что
разность фаз волн «1» и «3» равна ( |
2ω |
L). Если разность фаз равна цело- |
|||
|
|||||
му числу полного угла 2π, т.е. если |
с |
|
|||
|
|
|
|||
|
2ω |
L = n2π (n = 1, 2, …), |
(17) |
||
|
|
||||
|
с |
|
|
|
|
то волны «1» и «3» находятся в фазе, и их амплитуды складываются – наблюдается максимум интерференции этих волн. В противном случае волны будут гасить друг друга. Подставляя связь между круговой частотой
и длиной волны ω = 2λπc в соотношение (17), получим:
L = n |
λ . |
(18) |
|
2 |
|
Синфазное распространение волн «1» и «3» реализуется, если на длине струны укладывается целое число полуволн.
Аналогичный результат получится и для волн, бегущих справа налево − опоры B к опоре A. При этом волны, бегущие от B к A, находятся
в противофазе с волнами, бегущими от A к B за счет сдвига фазы на π радиан при отражении от опоры.
Итак, при выполнении условия (17) (или 18), волны, бегущие в од-
ном направлении, движутся в фазе и их амплитуды складываются.
Подчеркнем еще раз: если условие (17) (или 18) не выполняются, то при многократном отражении разность их фаз непрерывно изменяется, что приводит к уменьшению результирующей амплитуды, волны начинают гасить друг друга.
В реальном эксперименте потери энергии при отражении неизбежны, неизбежно также и затухание волны при распространении по струне. Часть
энергии волны передается устройствам крепления струны − опорам, а часть переходит во внутреннюю энергию материала струны, в результате чего струна нагревается. Поэтому полученное равенство амплитуд бегущих волн a 1 = a2 = … = am = ... не выполняется – амплитуды am уменьша-
ются. Вследствие потерь энергии сдвиг фазы на π радиан при отражении также точно не выполняется, ибо в точках крепления струны наблюдаются незначительные колебания, обеспечивающие передачу энергии креплению струны.
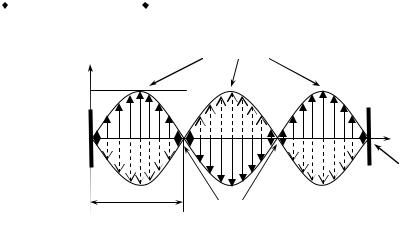
Уравнение стоячей волны. Результирующее колебание струны обусловлено интерференцией встречных волн. Обозначим результирующую амплитуду волн (при выполнении условия (17)), бегущих в положительном
направлении оси 0x, через Y(→) , а в обратном направлении – через Y(←). Здесь: Y(→) = a1 + a3 + a5 + … ; Y(←)= a2 + a4 + a6 + … (на рис. 3 стрелками
152
152  Приложение 1
Приложение 1
показаны только волны y1, y2, y3). Вследствие потерь энергии результи-
рующие амплитуды Y(→) и Y(←) имеют конечное значение (не бесконечно большое!) и не равны друг другу. Уравнение результирующей волны, бегущей в положительном направлении оси 0x, имеет вид:
y(→) = Y(→) sin (ωt – kx).
Уравнение результирующей волны, бегущей в отрицательном направлении оси 0x, имеет вид:
y(←) = Y(←) sin (ωt + kx + π) = − Y(←) sin (ωt + kx).
Результирующая волна y на струне определится суммой встречных бегу-
щих волн:
y = y(→) + y(←) = Y(→) sin (ωt – kx) − Y(←) sin (ωt + kx).
Прибавим и вычтем вспомогательную величину [Y(→) sin (ωt + kx)], получим:
y = [Y(→) sin (ωt – kx) – Y(→) sin (ωt + kx)] + [Y(→) sin (ωt + kx) − Y(←) sin (ωt + kx)],
или |
|
y = −2Y(→) sin kx cos ωt + (Y(→) − Y(←)) sin(ωt + kx). |
(19) |
Уравнение (19) описывает волновой процесс в струне.
Проведем анализ уравнения.
1. При Y(→) = Y(←) в уравнении (19) остается первый член, который описывает стоячую волну: y = −2Y(→) sin kx cos ωt . Второй член в (19) равен
нулю. Амплитуда колебаний частиц струны (2Y(→)sinkx) определяется координатой этих частиц. В точках с координатами, отвечающими условию sin
kx = 0, т .е. условию kx = nπ, колебания отсутствуют. Эти точки на струне называются узлами стоячей волны. Координаты узлов: т.к. k = 2λπ , то
xузел = n |
λ |
, n = 1, 2, 3, … |
(20) |
|
2 |
|
|
В частности, в точках крепления (x = 0 и х =L) находятся узлы стоячей волны. Имеем L = n λ2 , т.е. при реализации на струне стоячей волны, на
струне укладывается целое число полуволн. Полученное соотношение (20) коррелируется с формулой (18). При заданной длине струны L определим
набор собственных частот струны νn , при которых формируется стоячая волна: так как L = n λ2 = n 2νcn , то:
νn = n |
c |
, |
(21) |
|
2L |
||||
|
|
|
|
|
|
Приложение 1 |
153 |
|
|
|
|
153 |
||
или |
νn = n |
1 |
T . |
(22) |
|
2L |
|||||
|
|
ρ |
|
Фазовая скорость может быть рассчитана из экспериментальных данных
как по формуле c = |
2Lν n |
, так и по формуле c = |
T |
. Предполагается, что |
|
ρ |
|||
|
n |
|
||
при данном натяжении T дисперсия отсутствует.
Частота ν1 (n = 1, т.е. на струне укладывается одна полуволна), называется основным тоном струны, остальные собственные частоты называ-
ются обертонами. Собственные частоты − основной тон и обертона − еще называют резонансными частотами.
Обратим внимание на то обстоятельство, что собственные частоты (22) при малых колебаниях не зависят от собственных упругих свойств материала струны. Частота определяется внешним натяжением (задаваемым в эксперименте грузом) и плотностью струны, но не зависит от модуля Юнга, характеризующего собственные упругие свойства материала струны. Другими словами, если взять две струны из разных материалов,
но c одинаковой линейной плотностью ρ, и приложить к ним одинаковую силу натяжения T, то набор собственных частот этих двух струн будет одинаковым. Этот вывод обусловлен тем, что мы пренебрегли растяжением струны и считали, что сила натяжения одинакова во всех элементах струны при возбуждении колебаний. Разумеется, для струн из различных материалов растяжение при данной нагрузке T различно и определяется модулем Юнга.
В точках струны, отвечающих условию sin kx = 1 ( т.е. при условии kx =(2n + 1) π2 , где n = 1, 2, …) имеем максимумы амплитуды ко-
лебания в стоячей волне. Эти максимумы называются пучностями стоя-
чей волны. Итак, из условия sin kx = 1 получаем выражение для координат пучностей:
xпучн. = (2n + 1) |
λ . |
(23) |
|
4 |
|
В пучностях амплитуда стоячей волны имеет максимальное значение
и равна 2 Y(→), а по мере приближения к узлам, амплитуда колебаний уменьшается
График стоячей волны в отсутствии потерь приведен на рис. 4. Частицы струны между узлами колеблются в фазе. При переходе через
узел фаза изменяется на π радиан ( противофазные колебания частиц на соседних участках струны при переходе через узел).
154 |
154 |
Приложение 1 |
Пучности
y
2Y(→)
x
0
x=L
λ/2 Узлы
Рис. 4
2. В стоячей волне энергия не переносится, в узлах колебания отсутствуют. Однако в отсутствии потерь нет и необходимости компенсировать по-
тери. В реальном же эксперименте потери неизбежны, поэтому Y(→) ≠ Y(←). Энергия от источника переносится бегущей волной описываемой вторым слагаемым в (19), тем самым компенсируются потери энергии волны при отражении и потери за счет затухания волны в струне.
В реальном эксперименте бегущая волна вызывает небольшие колебания в узлах, вследствие чего узлы размываются. Величину амплитуды
бегущей волны Aбег. = (Y(→) − Y(←)) можно оценить по размаху колебания узлов.
В линейном приближении, т.е. при малых колебаниях струны, максимальная амплитуда стоячей волны 2Y(→) много больше амплитуды бегущей волны Aбег.: 2Y(→) >> Aбег.

Приложение 2 |
155 |
155 |
Приложение 2. Формулы и теоремы векторного исчисления
Векторные величины в тексте обозначены прямым полужирным шрифтом, скалярные – курсивом. Например, b – вектор, b – скаляр. точкой между сомножителями. Скалярное произведение векторов векторов a и b записывается как (ab). Векторное произведение обозначено заключением сомножителей в квадратные скобки через запятую. Например, векторное произведение векторов a и b записывается как [a, b].
1.Векторная алгебра
1.1. Скалярное произведение векторов ab называется произведение модулей векторов на косинус угла между этими векторами:
ab = ab cos(a^b).
Выражение скалярного произведения через компоненты векторов в декартовой системе координат:
ab = (ax i + ay j + az k) (bx i + by j + bz k) = ax bx + ay by + az bz ,
где i, j, k – единичные орты, ii = jj = kk = 1, ij = jk = ki = 0.
1.2. Векторное произведение двух векторов [a, b]. В результате векторного произведения векторов a и b получается новый вектор c: [a, b] = c. Модуль результата векторного произведения – модуль вектора с - по определению равен c = ab sin (a^b). В декартовой системе координат векторное произведение имеет вид
[a, b] = [(ax i +ay j +az k) (bx i +by j +bz k)] = (ay bz − az by)i + (az bx − ax bz)j + (ax by − ay bx)k.
Векторное произведение [a, b] можно представить в форме определителя:
[a, b] = |
i |
j |
k |
. |
ax |
a y |
az |
||
|
bx |
by |
bz |
|
1.3. Смешанное (скалярно-векторное) произведение трех векторов а[bc]. Результатом такого произведения является скалярная величина:
а[b, c] = axbycz − axbzcy + aybzcx − aybxcz + azbxcy − azbycx .
Смешанное произведение допускает циклическую (стековую) перестановку векторов:
а[b, c] =c[а, b] = b[c, а].
По своему геометрическому смыслу смешанное произведение равно объему параллелепипеда, построенного на векторах а, b и c.
1.4.Двойное векторное произведение [а, [bc]]:
[а, [b, c]] = b(ac) − c(ab).
Здесь вначале выполняются скалярные произведения, стоящие в скобах (т.е. скалярные произведения ac и ab), и только затем вектора b и c
156 |
156 |
Приложение 2 |
умножаются на соответствующие результаты скалярного произведения. Компоненты результата двойного векторного произведения имеют вид:
[а, [bc]]x = bx (ac) − cx (ab), [а, [bc]]y = by (ac) − cy (ab), [а, [bc]]z = bz (ac) − cz (ab).
При проведении циклической перестановки в двойном векторном произведении получаются три разных вектора, сумма которых равна нулю:
[а,[b, c]] +[c,[а, b]] +[b, [c, а]] = 0
2.Векторный анализ
2.1.Векторный оператор набла (оператор Гамильтона) как символический вектор:
= ∂∂x i + ∂∂y j + ∂∂z k.
2.2.Градиент скалярной функции (скалярного поля) ϕ(x, y, z) – это век-
тор, направленный в сторону быстрейшего увеличения ϕ и равный производной по этому направлению. В координатном представлении градиент имеет вид:
gradϕ = ϕ (в развернутом виде ϕ = ∂∂ϕx i + ∂∂ϕy j + ∂∂ϕz k).
2.3. Дивергенция некоторого вектора E в данной точке пространства – это поток вектора E из бесконечно малого объема dV, находящегося в этой точке пространства. Объем dV – источник или сток вектора E. Дивергенция вектора E – скалярная величина и определяется скалярным произведением оператора набла на вектор E:
div E ≡ E. В развернутом виде E = ∂∂Exx + ∂∂Eyy + ∂∂Ezz .
2.4. Ротор некоторого вектора E – это вектор, порождающий циркуляцию некоторого другого вектора по бесконечно малому контуру. Напри-
мер, в уравнении Максвелла rot Е = − ∂∂Bt вектор ∂∂Bt является ротором, ко-
торый порождает вихревой вектор – напряженность вихревого электрического поля Е. Ротор вектора E – векторная величина и определяется
векторным произведением оператора набла на вектор E: rotE ≡ [, E].
∂Ez |
|
∂E y |
∂Ex |
|
∂Ez |
∂E y |
|
∂Ex |
|||||
В развернутом виде [, E] = |
|
− |
|
i + |
|
− |
j + |
|
− |
|
k). |
||
|
∂y |
|
∂z |
|
|
∂z |
|
∂x |
|
∂x |
|
∂y |
|
|
|
|
|
|
|
|
|||||||
Приложение 2 |
157 |
157 |
2.5.Некоторые векторные тождества.
1. (ϕ) = 2ϕ = ∂2ϕ + ∂2ϕ + ∂2ϕ , где ϕ - скалярная функция.
∂x2 ∂y2 ∂z2
2.[ , (ϕ)] = 0.
3.[ , E] = 0, где E - векторная функция.
4.[ , [ , E]] = ( E) −2E.
5.(δϕ) = δ ϕ + ϕ δ, где δ и ϕ - скалярные функции.
6.(ϕ E) = ϕ ( E) + Eϕ.
7.[ (ϕ E)] = ϕ [ E] + [(ϕ) E].
2.6.Теоремы векторного анализа.
1.Теорема Гаусса. Здесь объем V ограничен замкнутой поверхностью S. Вектор dS в данной точке замкнутой поверхности направлен по внешней нормали к поверхности.
а) |
( E)dV = |
E dS |
или в форме |
divEdV = |
E dS; |
|
|
(V ) |
(S ) |
|
(V ) |
(S ) |
|
б) |
( ϕ)dV = |
ϕ dS |
или в форме |
gradϕ dV = |
ϕ dS |
|
|
(V ) |
(S ) |
|
(V ) |
|
(S ) |
2. Теорема Стокса. Здесь замкнутый контур L ограничивает поверхность S, натянутая на контур. Вектор dl (как элемент контура L) по направлению совпадает с положительным обходом контура. Положительный обход контура связан с положительной нормалью к поверхности S правилом правого винта.
а) |
[ ,E]dS = |
Edl |
или в форме |
rotEdS= |
|
Edl; |
|
|
(S ) |
|
(L) |
|
(S ) |
(L) |
|
б) |
[dS ( ϕ)] = |
|
ϕ dl |
или в форме |
[dS gradϕ]= |
ϕ dl. |
|
|
(S ) |
(L) |
|
(S ) |
|
(L) |
|
СОДЕРЖАНИЕ
1. |
Электростатическое поле |
4 |
|
|
1.1. |
Объекты электростатики |
4 |
|
1.2. |
Закон Кулона. Напряженность электростатического поля |
|
|
|
и интегральная теорема Гаусса |
5 |
|
1.3. |
Дифференциальная форма теоремы Гаусса. |
|
|
|
Дивергенция электрического поля |
10 |
|
1.4. |
Работа электростатического поля. |
|
|
|
Потенциал электростатического поля |
15 |
|
1.5. |
Потенциальная энергия взаимодействия зарядов |
17 |
|
1.6. |
Энергия электрического поля |
19 |
|
1.7. |
Материальное физическое поле. Скалярные и векторные поля |
20 |
|
1.8. |
Градиент потенциала электростатического поля |
22 |
|
1.9. |
Циркуляция электростатического поля |
25 |
|
1.10.Связь напряженности и потенциала электростатического поля |
25 |
|
|
1.11.Градиент как потенциальный вектор |
27 |
|
|
1.12.Уравнения Пуассона и Лапласа |
28 |
|
2. |
Магнитостатическое поле |
32 |
|
|
2.1. |
Объекты магнитостатики |
32 |
|
2.2. Поток вектора индукции магнитного поля B |
|
|
|
|
через замкнутую поверхность |
32 |
|
2.3. |
Закон Био-Савара-Лапласа |
33 |
|
2.4. Циркуляция индукции магнитного поля тока |
35 |
|
|
2.5. Напряженность магнитного поля H. Циркуляция H |
36 |
|
|
2.6. |
Сила Лоренца, сила Ампера |
39 |
3. Электромагнитная индукция 41
3.1. Закон электромагнитной индукции Фарадея.
Физическая природа электромагнитной индукции 41
3.2. Самоиндукция. Индуктивность проводника 43 3.3. Магнитная энергия 44

Содержание |
159 |
4. Электродинамика 46
4.1. |
Объекты теории электромагнитного поля. |
|
|
Уравнения Максвелла как постулаты электродинамики |
46 |
4.2. |
УравненияМаксвеллавинтегральной |
|
|
идифференциальнойформе |
47 |
|
4.2.1. Интегральная теорема Гаусса |
|
|
и дивергенция электрического и магнитного полей |
48 |
|
4.2.2. Циркуляция и ротор вихревого электрического поля |
49 |
|
4.2.3. Циркуляция и ротор магнитного поля. |
|
|
Гипотеза Максвелла |
57 |
4.3. |
Материальные константы и уравнения связи |
61 |
4.4. |
Уравнение движения заряженных частиц |
62 |
4.5. |
Волновое уравнение плоской электромагнитной волны |
|
|
в идеальном диэлектрике |
64 |
4.5.1.Из уравнений Максвелла вытекает существование электромагнитного излучения (электромагнитной
волны) 64
4.5.2.Волновое уравнение плоской электромагнитной волны в идеальном диэлектрике в отсутствии потерь.
Решение волнового уравнения, свойства волны 67
4.6. |
Дифференциальные уравнения Максвелла |
|
|
в комплексной форме |
74 |
4.7. |
Граничные условия |
76 |
|
4.7.1. Граничные условия для векторов E и D |
|
|
электростатического поля (граница раздела |
|
|
двух однородных диэлектриков) |
76 |
|
4.7.2. Граничные условия для векторов B и H |
|
|
магнитостатического поля (граница раздела |
|
|
двух однородных магнетиков) |
79 |
|
4.7.3. Граничные условия в переменном |
|
|
электромагнитном поле |
81 |
4.8. Электромагнитная волна в среде с проводимостью |
83 |
|
|
4.8.1. Комплексная диэлектрическая проницаемость |
83 |
|
4.8.2. Уравнение плоской волны в среде с проводимостью |
86 |
4.9. Энергетические соотношения в электромагнитной волне |
90 |
|
|
4.9.1. Поток плотности электромагнитной энергии, |
|
|
вектор Пойнтинга |
90 |

160 |
Содержание |
|
|
4.9.2. Теорема Умова-Пойнтинга |
93 |
|
4.9.3. Поток энергии электромагнитного поля |
|
|
вдоль подводящих проводов, поглощение энергии |
|
|
в проводах (постоянный ток) |
96 |
|
4.9.4. Идеальная двухпроводная линия передачи |
|
|
электромагнитной энергии (переменные ток) |
102 |
|
4.9.5. Реальная двухпроводная линия передачи э |
|
|
лектромагнитной энергии (переменные ток) |
105 |
4.9.6.Оценка распределение плотности потока переносимой электромагнитной энергии в пространстве
около проводов линии передачи |
108 |
4.10.Отражение и преломление плоской электромагнитной волны |
|
на границе раздела сред |
109 |
4.10.1.Отражение и преломление плоской электромагнитной волны при нормальном падении на границу
раздела сред 109
4.10.2.Отражение и преломление плоской электромагнитной волны при наклонном падении на границу
раздела сред 113
4.10.3.Распространение плоской электромагнитной волны в проводящей (поглощающей) среде при наклонном
падании волны из диэлектрика |
119 |
4.10.4. Затухание электромагнитной волны в проводящей среде. |
|
Граничные условия Леонтовича |
123 |
4.11.Волновод как линии передачи электромагнитной волны |
125 |
4.11.1. Идеально проводящая плоскость как волновод |
126 |
4.11.2.Распространение электромагнитной волны между параллельными идеально
проводящими поверхностями 129
4.11.3. Прямоугольный металлический волновод 139
Приложения |
|
Приложение 1. Бегущая и стоячая волна в струне |
145 |
Приложение 2. Формулы и теоремы векторного исчисления 155