

5. Частотные характеристики.
Частотные характеристики (АФЧХ, АЧХ, ФЧХ и ЛАХ) апериодического звена II-ого порядка имеют достаточно сложный аналитический вид.
(17) Колебательное звено:
1. Передаточная функция.
Передаточная функция колебательного звена имеет вид:
W(s) =K/[T2·s2+ 2T·ξ·s+ 1]
где K– коэффициент передачи;T– постоянная времени, характеризующая инерционность системы, т.е. продолжительность переходного процесса в ней. (T> 0);ξ– коэффициент (декремент) затухания, который характеризует рассеяние энергии в звене ( 0 <ξ< 1).
При ξ 1
колебательное звено превращается в
апериодическое звено П-го порядка.
1
колебательное звено превращается в
апериодическое звено П-го порядка.
2. Математическое описание звена.
Колебательное звено описывается дифференциальным уравнением второго порядка:
T2·d2у(t)/dt2+ 2Tξ·dу(t)/dt+ у(t) =K·х(t)
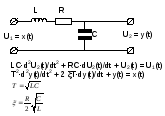
3. Физическая реализация звена.
Примером колебательного звена является электрический колебательный контур, груз на пружине, маятник, стрелочный прибор.

4. Переходная характеристика.
Переходная характеристика колебательного звена имеет вид:
h(t) = L-1[W(s)/s)] = L-1[K/[s·(T2s2 + 2T ξs +1)]] =

Переходная функция имеет достаточно
сложный вид, но наиболее характерно то,
что имеется экспоненциальное затухание
переходного процесса с коэффициентом
- ξ/T, а
также колебательность с частотой .
.
Здесь важно отметить, что частота зависит от коэффициента затухания. При ξ→ 0 ωк→ 1/T; приξ→ 1 ωк→ 0.
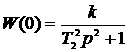
5. Весовая функция.
Весовая функция колебательного звена имеет вид:
w(t) = L-1[W(s)] = L-1[K/(T2s2 + 2T ξ s +1)] =
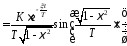
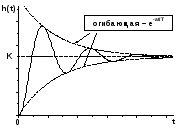
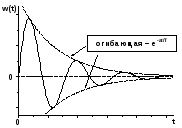
Рис. 4.4. Переходная и весовая характеристики колебательного звена.
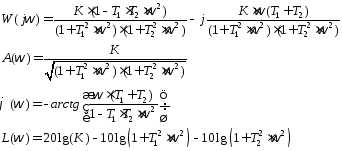
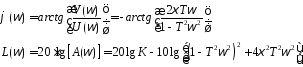
6. Частотные характеристики.
Частотные характеристики колебательного звена имеют следующий вид:
W(jω) =K/(T2·(–jω)2+ 2Tξ·jω+ 1) =

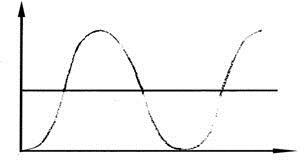
(18 )Консервативное звено:
Если при колебании отсутствует потери энергии в звене, то такое звено называется колебательным консервативным.
Уравнение динамики консервативного звена в операторной форме при Т1=0.
![]()
Передаточная функция
АФЧХ и временная характеристика

Временная характеристика
|
| |
|
|
|
АФЧХ
|
| |
|
|
|

АФЧХ при изменении ω от 0 до бесконечности начинается на положительной вещественной оси на расстоянии к от начала координат и уходит в бесконечность, а возвращается от минус бесконечности по оси отрицательных вещественных чисел.
(20) Структурное преобразование: Структурные схемы систем автоматического управления
Систему автоматического управления можно рассматривать как комбинацию динамических звеньев (типовых и нетиповых). Каждое звено имеет определенное математическое описание, выраженное чаще всего в виде передаточной функции W(s). Зная математическое описание звеньев и связи между ними, всегда можно получить математическое описание всей системы в целом. Для представления системы управления с помощью динамических звеньев используютструктурные схемы.
Дадим определение структурной схемы. Структурной схемой называется изображение системы управления в виде совокупности типовых и нетиповых динамических звеньев с указанием связей между ними.
Основными элементами структурных схем являются следующие.
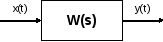
1. Динамическое звено.Звено в структурной схеме выступает как элементарная структурная единица, преобразователь информации (сигнала). В поле звена указывается его математическое описание (передаточная функцияW(s)).
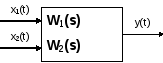
Как правило, звено имеет один вход и один выход, однако допускается также использование в структурных схемах звеньев с несколькими входами и одним выходом. Тогда возле каждого входа указывается своя передаточная функция. Выходной сигнал в этом случае будет определяться выражением:
Y(s) = W1(s)X1(s) + W2(s)X2(s) + …
2. Линия передачи сигнала (линия связи).Устанавливает связь между звеньями. Стрелка указывает направление передачи сигнала.

3. Разветвление (узел).Используется, когда один и тот же сигнал поступает на разные звенья системы управления.

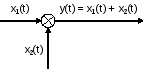
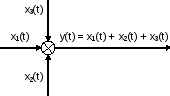
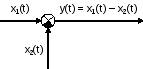
4. Сумматор.Используется, когда сигналы преобразуются в новый сигнал, равный сумме исходных. Поскольку сигналы в одной системе управления могут иметь разную физическую природу, то следует особо отметить, чтосуммируемые сигналы должны иметь одинаковую размерность(нельзя, например, складывать электрическое напряжение с током).
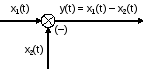
5. Элемент сравнения.Формирует сигнал, равный разности входных сигналов. Элемент сравнения можно рассматривать как сумматор с инвертированным входом. Встречается два варианта обозначения вычитаемого сигнала, поступающего на вход элемента сравнения: 1) сектор, соответствующий входу вычитаемого сигнала, выделяется цветом; 2) вход вычитаемого сигнала указывается знаком минус.
Преобразование структурных схем
При расчетах систем автоматического управления может возникнуть необходимость в преобразовании структурной схемы для приведения ее к более простому виду или к виду, более удобному для решения некоторой конкретной задачи. Исходная и преобразованная структурные схемы должны быть эквивалентными, т.е. одинаковым образом отражать динамические свойства системы управления.
Любая структурная схема включает в себя последовательно и параллельно соединенные звенья, а также элементы соединенные обратной связью. Звенья соединенные подобным образом можно заменить на одно звено, имеющее эквивалентную передаточную функцию.