

3) Частотные характеристики ( в тет ).

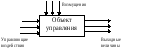
(6)Объект управления.(свойства его):
Теория автоматического управления изучает методы математического моделирования, анализа и синтеза систем автоматического управления (САУ).
Под САУ понимается совокупность объекта управления (ОУ) и управляющего устройства (УУ).
Под объектом управленияпонимается некий механизм, агрегат, устройство, некий технологический, энергетический, экономический, социальный процесс, желаемое поведение или протекание которого должно быть обеспечено.
Поведение объекта управления, результат его функционирования определяется некоторыми показателями. Чаще всего ими являются значения физических (или другой природы) величин, называемых выходными величинами.
В реальных условиях на каждый объект управления многочисленные воздействия оказывает окружающая (внешняя) среда. Из всего многообразия воздействий в поле зрения оставляют лишь те, которые оказывают наибольшее влияние на выходные величины, и называют их входными воздействиями.
Входные воздействия с точки зрения их влияния на ОУ разделяются на две принципиально отличные группы. Некоторые из них обеспечивают желаемое изменение поведения объекта, достижение поставленных целей. Такие входные воздействия называются управляющими, при их отсутствии задача управления вообще не имеет места. Другие входные воздействия мешают достижению цели управления и называютсявозмущающимиили помехами.
Задача управления заключается в формировании такого закона изменения управляющих воздействий, при которых достигается желаемое поведение объекта независимо от наличия возмущений.
(8) Определение свойств объекта по кривой разгона:
Кривая разгона – это реакция объекта на ступенчатую функцию.
Определение динамических характеристик объекта управления по его кривой разгона:
При
определении динамических характеристик
объекта по его кривой разгона на вход
подается или ступенчатый пробный сигнал
или прямоугольный импульс. Во втором
случае кривая отклика должна быть
достроена до соответствующей кривой
разгона.
При снятии кривой разгона
необходимо выполнить ряд условий:
1.
Если проектируется система стабилизации,
то кривая разгона должна сниматься в
окрестности рабочей точки процесса.
2.
Кривые разгона необходимо снимать как
при положительных, так и отрицательных
скачках управляющего сигнала.
По
виду кривых можно судить о степени
асимметрии объекта.
При небольшой
асимметрии расчет настроек регулятора
рекомендуется вести по усредненным
значениям параметров передаточных
функций. Линейная асимметрия наиболее
часто проявляется в тепловых объектах
управления.
3. При наличии зашумленного
выхода желательно снимать несколько
кривых разгона с их последующим наложением
друг на друга и получением усредненной
кривой.
4. При снятии кривой разгона
необходимо выбирать наиболее стабильные
режимы процесса, например, ночные смены,
когда действие внешних случайных
возмущений маловероятно.
5. При снятии
кривой разгона амплитуда пробного
входного сигнала должна быть, с одной
стороны, достаточно большой, чтобы четко
выделялась кривая разгона на фоне шумов,
а, с другой стороны, она должна быть
достаточно малой, чтобы не нарушать
нормального хода технологического
процесса.
Сняв кривую разгона, и
оценив характер объекта управления (с
самовыравниванием или без) можно
определить параметры соответствующей
передаточной функции. Передаточную
функцию вида (1.5) рекомендуется применять
для объектов управления с явно выраженной
доминирующей постоянной времени
(одноемкостный объект). Перед началом
обработки кривую разгона рекомендуется
пронормировать (диапазон изменения
нормированной кривой 0 - 1) и выделить из
ее начального участка величину чистого
временного запаздывания.
Пример.
Дана
нормированная кривая разгона объекта,
у которой заранее выделена величина
чистого запаздывания ![]()
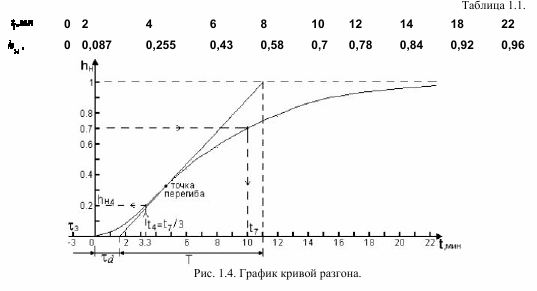
Построим
график кривой разгона (рис. 1.4) по ее
значениям, приведенным в таблице
1.1.
Динамический коэффициент K усиления
объекта определяется как отношение
приращения выходного сигнала к приращению
входного в окрестности рабочей
точки.
Определение динамических
характеристик объектов по кривой разгона
можно производить двумя методами.
1)
Метод
касательной к точке перегиба кривой
разгона. В
данном случае точка перегиба соответствует
переходу кривой от режима ускорения к
режиму замедления темпа нарастания
выходного сигнала. Постоянная времени Т и
динамическое запаздывание![]() определяются
в соответствии с графиком рис.1.4,
т.е.
определяются
в соответствии с графиком рис.1.4,
т.е. ![]() 2) Формульный
методпозволяет
аналитически вычислить величину
динамического запаздывания и постоянной
времени по формулам:
2) Формульный
методпозволяет
аналитически вычислить величину
динамического запаздывания и постоянной
времени по формулам:

где
значение ![]() ,берется
в окрестности точки перегиба кривой, а
значение
,берется
в окрестности точки перегиба кривой, а
значение ![]() принимается
равным 0,8 - 0,85. По этим значениям
определяются и моменты времени
принимается
равным 0,8 - 0,85. По этим значениям
определяются и моменты времени ![]() .
Методику
определения параметров динамической
модели (1.6) объекта без самовыравнивания
рассмотрим на примере кривой разгона
уровня в барабане котла теплоагрегата.
Предполагается, что на вход объекта
увеличили подачу воды на 10
т/час =DG,
при этом уровень начал увеличиваться.
Приращение уровня зафиксировано в
таблице 1.2.
.
Методику
определения параметров динамической
модели (1.6) объекта без самовыравнивания
рассмотрим на примере кривой разгона
уровня в барабане котла теплоагрегата.
Предполагается, что на вход объекта
увеличили подачу воды на 10
т/час =DG,
при этом уровень начал увеличиваться.
Приращение уровня зафиксировано в
таблице 1.2.
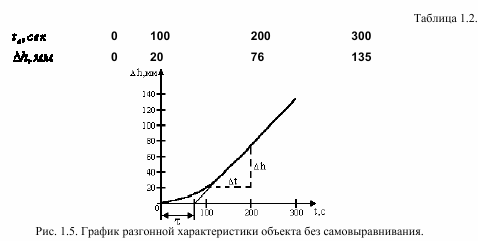
График разгонной характеристики объекта без самовыравнивания, построенной в соответствии с приведенной таблицей показан на рис. 1.5. Для объекта без самовыравнивания коэффициент усиления определяется как отношение установившейся скорости изменения выходной величины к величине скачка входного сигнала. В нашем примере
![]()
Величина
динамического запаздывания ![]() в
объекте определяется так, как показано
на рис.1.5
в
объекте определяется так, как показано
на рис.1.5
(9) Преобразование Лапласа:
Применение преобразования Лапласа для решения линейных дифференциальных уравнений.
Линейные дифференциальные уравнения динамических систем решаются методами, которые подробно рассматриваются в курсах высшей математики. Для задач ТАУ наиболее удобным является операционный метод решения, основанный на функциональном преобразовании Лапласа
 .
.
Эта функция устанавливает соответствие между функцией времени х(t) (вещественной переменной) и функциейХ(s) (комплексной переменнойs=c+jω). Здесьх(t) – оригинал,Х(s) – изображение. Символически эта операция записывается так:
Х(s) = .
.
Чтобы вернуться от изображения к оригиналу, нужно выполнить обратное преобразование Лапласа по формуле:
 .
.
Символ Lуказывает на то, что над функциейх(t) совершено преобразование Лапласа. На практике, чтобы не вычислять интегралы, для нахождения изображения по известному оригиналу или наоборот, используют специальные таблицы. Ниже приведено преобразование Лапласа дляосновных функций, которые наиболее часто встречаются при анализе систем автоматического управления.
Таблица преобразований Лапласа
|
х(t) (t > 0) |
Х(s) = L[х(t)] |
|
1(t) |
1/s |
|
δ(t) |
1 |
|
t |
1/s2 |
|
tn |
n!/sn+1 |
|
eat |
1/(s – a) |
|
e-at |
1/(s + a) |
|
t·eat |
1/(s – a)2 |
|
tn·eat |
n!/(s – a)n+1 |
|
sin(ωt) |
ω/(s2 + ω2) |
|
cos(ωt) |
s/(s2 + ω2) |
|
sin(ωt + φ) |
[sin(φ) ·s + cos(φ) ·ω]/(s2 + ω2) |
|
cos(ωt + φ) |
[cos(φ) ·s – sin(φ) ·ω]/(s2 + ω2) |
|
eat·sin(ωt) |
ω/[(s – a)2 + ω2] |
|
eat·cos(ωt) |
(s – a)/[(s – a)2 + ω2] |
|
eat·sin(ωt + φ) |
[sin(φ) ·(s – a) + cos(φ) ·ω]/[(s – a)2 + ω2] |
|
eat·cos(ωt + φ) |
[cos(φ) ·(s – a) – sin(φ) ·ω]/[(s – a)2 + ω2] |
(n! – выражение факториала, оно равно: n! = 1·2·3·4·…· (n – 1) ·n).
Особо следует отметить, что вид оригинала функций, приведенных в таблице, определен только для t > 0, т.е. значения переменной t ограничены областью положительных значений. Для отрицательных t значение функции х(t) равно нулю. Это важно, и игнорирование этого факта может на практике привести к существенным ошибкам.
Рассмотрев преобразование Лапласа, дадим определение передаточной функции звена САУ.
Передаточной функцией звена W(s) называется отношение изображений Лапласа выходной и входной величин при нулевых начальных условиях, т.е.
 . (2.4)
. (2.4)
Для рассмотренного выше примера (выражение 2.3) передаточная функция W(s) будет отличаться отW(р) только заменой оператора дифференцированиярна комплексную переменнуюsи будет выглядеть следующим образом:
 .
.