

4. Переходная функция.
h(t) =L-1[W(s)/s] =L-1[T] =T·δ(t)
Таким образом, реакция дифференцирующего звена на ступенчатую функцию – это короткий импульс.
5. Весовая функция.
w(t) = L-1[W(s)] = L-1[T·s] = T·dδ(t)/dt
Переходную и весовую функцию дифференцирующего звена трудно изобразить графически, и тем более сложно представить, каков отклик (реакция) этого звена на входное воздействие. Поэтому рассмотрим отклик дифференцирующего звена на линейное (нарастающее) входное воздействие:
х(t) = t Х(s) = 1/s2.
у(t) = L-1[W(s)·Х(s)] = L-1[T·s/s2] = L-1[T/s] = T·1(t).
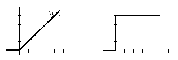
Другими словами, если на вход дифференцирующего звена подать линейно нарастающий сигнал, то в момент подачи сигнала на выходе мы будем иметь скачок выходного сигнала с 0 до T.
6. Частотные характеристики.

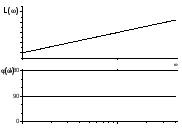
Рис. 5.1. АФЧХ, ЛАХ и ЛФХ дифференцирующего звена.
W(jω) = T·j·ω = 0 + Tω·j
A(ω) = Tω
φ(ω) = arctg(Tω/0) arctg(∞) = π/2
L(ω) = 20lg[A(ω)] = 20lg(Tω).
Как видим, частотные характеристики дифференцирующего звена обратны частотным характеристикам интегрирующего звена.
(16) Апериодическое звено II-ого порядка:
1. Передаточная функция.
Передаточная функция апериодического звена II-ого порядка имеет вид:
W(s) =K/[(T1·s+ 1)·(T2·s+ 1)]
где K– коэффициент усиления;T1иT2– постоянные времени, также характеризующая инерционность системы, т.е. продолжительность переходного процесса в ней. (T1> 0 иT2> 0).
2. Математическое описание звена.
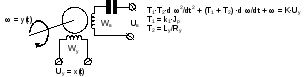
Апериодическое звено II-ого порядка описывается дифференциальным уравнением второго порядка:
(T1T2)·d2у(t)/dt2+ (T1+T2)·dу(t)/dt+ у(t) =K·х(t)
3. Физическая реализация звена.
Апериодическое звено II-ого порядка можно рассматривать как комбинацию двух апериодических звеньевI-ого порядка, т.е. это могут быть различного рода двухъемкостные (двухкаскадные) тепловые, гидравлические и пневматические объекты. Примером апериодического звенаII-ого порядка также является двухфазный асинхронный электродвигатель.
4. Переходная характеристика.
Переходная характеристика апериодического звена II-ого порядка имеет вид:
h(t) = L-1[W(s)·1(t)] = L-1[K/[s·(T1·s + 1)·(T2·s + 1)]] =
= K·[1 – (T1/(T1 – T2))·e-t/T1 – (T2/(T2 – T1))·e-t/T2]
В частном случае, когда T1=T2=Tаналитическое выражение для переходной характеристики имеет несколько иной вид:
h(t) = L-1[W(s)·1(t)] = L-1[K/[s·(T·s + 1)2]] =
= K·[1 – e-t/T – (t/T)·e-t/T]
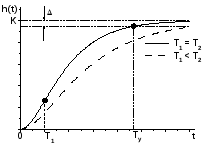
Рис. 4.1. Переходная характеристика апериодического звена П-го порядка.
Переходный процесс апериодического звена II-ого порядка имеет экспоненциальный вид с перегибом в начальной области. Это означает, чтозвено имеет высокую инерционность и как бы не сразу начинает реагировать на входное воздействие. Установившееся значение равно:hуст=K.
Время регулирования Tу(время переходного процесса) для апериодического звенаII-ого порядка в 3 – 5 раз превышает значение большей из постоянных времени.
Tу≈ (3 ÷ 5)·T2
4. Весовая функция.
Весовая функция апериодического звена II-ого порядка имеет вид:
w(t) = L-1[W(s)] = L-1[K/ [(T1·s + 1)·(T2·s + 1)]] =
= K·[(1/(T1 – T2))·e-t/T1 + (1/(T2 – T1))·e-t/T2]
В частном случае, когда T1=T2=Tаналитическое выражение для весовой функции имеет несколько иной вид:
w(t) = L-1[W(s)] = L-1[K/ (T1·s + 1)2] =
= (K·t/T2)·e-t/T
Для весовой функции апериодического звена II-ого порядка характерно плавное изменение амплитуды с максимумом: 1) в точке t = T для случая, когда T1 = T2 = T; 2) в точке t = TП (приведенная постоянная времени) для случая, когда T1 ≠ T2.
Приведенная постоянная времени Tп определяется по формуле:

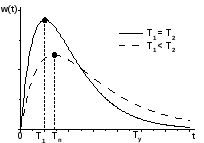
Рис. 4.2. Весовая характеристика апериодического звена П-го порядка.