

СКЕ / 2_Асинхронные двигатели. Принцип работы. Схемы замещения. Механические характеристики
.pdfФормула является приближенной, так как не учитывает падение напряжения в обмотках статора. Для исследования двигательного режима уравнение (5.76) дает приемлемую точность (10-17%).. Это объясняется тем,
что в области малых скольжений от s = 0 до s = sк магнитный поток изменяется незначительно и, следовательно, в этой области формула не может дать большой погрешности, тем более, что точки s = 0 и s = sк являются фиксированными.
При скольжениях, близких к единице, формула (5.76), казалось бы,
должна давать завышенные значения момента, так как при больших токах сильнее проявляется падение напряжения в статоре. Однако в реальных машинах при скольжениях, близких к единице, уменьшается сопротивление
X 2 из-за явления вытеснения тока в проводниках ротора, что ведет к увеличению момента. В результате оказывается, что погрешность,
обусловленная пренебрежением падения напряжения в статоре, и погрешность, вызванная изменением параметров ротора, взаимно противоположны,
вследствие чего точность приближенной формулы (5.76) достаточна для практических целей.
5.6.2.Тормозные режимы работы
5.6.2.1Торможение противовключением
Торможение противовключением может сделано путем изменения чередования двух фаз питающего напряжения (рис 5.20). Данное торможение применяют как один из способов остановки двигателя.
C |
|
|
|
B |
|
|
|
A |
|
|
|
B1 C1 |
A1 |
B1 |
C1 |
A1 |
|
||
ω |
|
|
ω |
M |
M |
|
|
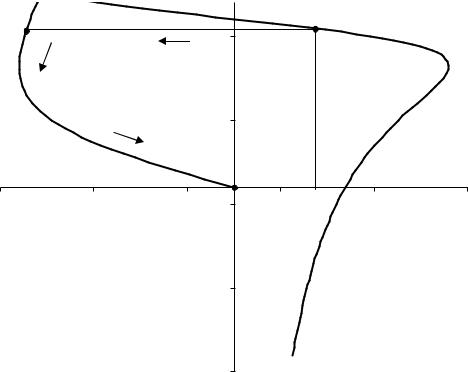
Рисунок 5.20 – Изменение чередования фаз питающего напряжения Рассмотрим механические характеристики двигателя при торможении
противовключением (рис. 5.21).
89

|
|
|
|
ω |
1 |
Двигательный |
||
|
|
|
2 |
|
режим |
|
|
|
|
|
|
|
|
|
|
|
|
Торможение |
|
|
|
|
|
|||
противовключением |
|
|
|
|
||||
|
|
|
3 |
|
|
|
|
|
−M |
|
|
−M с |
|
M с |
|
M |
|
|
|
|
|
|
|
Генераторный |
||
|
|
|
4 |
−ω |
|
режим |
|
|
|
|
|
5 |
|
|
|
||
|
|
|
|
|
|
|
|
|
Рисунок |
5.21 |
– |
Механические |
характеристики |
при |
торможении |
||
противовключением |
|
|
|
|
|
|
|
|
Допустим, что двигатель работает в двигательном режиме, момент |
||||||||
нагрузки равен Mc (рис. 5.21, |
точка 1). Переключение двух фаз, изменит |
|||||||
текущее направление вращения магнитного поля статора, и двигатель перейдет |
||||||||
в точку 2. Переход, из точки 1 в точку 2, произойдет при той же частоте |
||||||||
вращения ротора. Далее скорость начнет снижаться, и в момент времени, когда |
||||||||
двигатель дойдет до точки 3 (скорость равна нулю), необходимо отключить |
||||||||
обмотку статора от сети. В противном случае ротор начнет разгоняться, и вновь |
||||||||
перейдет в двигательный режим – |
точку 4. Однако, направление вращения вала |
|||||||
ротора будет обратно предыдущему. |
|
|
|
|
||||
В процессе торможения скольжение будет изменяться от s = 2 (точка 2) |
||||||||
до s = 1 (точка |
3). |
При торможении противовключением, токи в обмотке |
||||||
двигателя в 6-8 раз превышают номинальный ток двигателя, что приводит к |
||||||||
сильному нагреву обмоток, ускоряя их износ. |
|
|
|
|||||
5.6.2.2 Генераторное торможение
Генераторное торможение (торможение с отдачей энергии в сеть)
используется в подъемно-транспортных механизмах при спуске грузов (момент
90

нагрузки активный). Под действием опускающегося груза ротор асинхронной машины начинает вращаться с частотой вращения, превышающей синхронную частоту вращения ωo . При этом машина переходит в генераторный режим и начинает создавать тормозной момент. Равновесному состоянию будет соответствовать точка пересечения механической характеристики и линии активного статического момента. При этом груз будет опускаться с установившейся скоростью.
Допустим, что двигатель поднимал груз, работая в двигательном режиме,
активный момент нагрузки равен Mc (рис. 5.21, точка 1). Для перехода в режим спуска груза переключим две фазы. При этом изменится текущее направление вращения магнитного поля статора, и двигатель перейдет в точку 2. Переход, из точки 1 в точку 2, произойдет при той же частоте вращения ротора. Далее скорость начнет снижаться, проходя через точки 3 (скорость равна нулю), 4 (двигательный режим с обратным направлением вращения). Новое равновесное состояние наступит в точке 5.
5.6.2.3 Динамическое торможение
Динамическое торможение асинхронного двигателя (торможение постоянным током) осуществляется путем подключения к двум любым фазам обмотки статора источника постоянного тока.
A
B  +
+
C
|
|
|
|
K1 |
|
|
|
|
K 2 |
||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rm
M 
Рисунок 5.22 - Схема динамического торможения
Для динамического торможения с помощью группы контактов K1
(рис. 5.22) асинхронный двигатель сначала отключают от питания трехфазным переменным током, и только после этого, замыкают группу контактов K 2 ,
91
подавая постоянный ток. Величину постоянного тока регулируют сопротивлением Rт (рис. 5.22).
Ввиду того, что при питании постоянным током обмотка будет обладать только омическим сопротивлением, для получения нужного значения тока достаточно небольшого по величине напряжения.
При отключении переменного тока, вращающееся магнитное поле исчезает. После подключения источника постоянного тока создается постоянное (неподвижное) магнитное поле. Ротор по инерции продолжает вращаться теперь уже в неподвижном магнитном поле. В обмотке ротора наводится ЭДС, ее частота прямо пропорциональна частоте вращения вала.
ЭДС создает ток и магнитный поток.
Взаимодействие неподвижного магнитного поля статора и тока ротора создает тормозной момент. При этом асинхронный двигатель становится генератором, преобразуя кинетическую энергию вращающегося вала в электрическую энергию. Последняя рассеивается в обмотке ротора в виде тепловой энергии.
Кривая динамического торможения проходит через начало координат. Торможение происходит до полной остановки ротора (рис. 5.23).
|
ω |
Двигательный |
2 |
1 |
режим |
|
|
|
|
Динамическое |
|
|
торможение |
|
|
3 |
|
−M |
M с |
M |
|
−ω |
|
Рисунок 5.23 – |
Механическая характеристика динамического торможения |
|
асинхронного двигателя |
|
|
92
Допустим, что двигатель работает в двигательном режиме, момент нагрузки равен Mc (рис. 5.23, точка 1). После отключения переменного тока и подачи на обмотку статора постоянного тока, двигатель перейдет в режим динамического торможения (рис. 5.23, точка 2). Переход, из точки 1 в точку 2,
произойдет при той же частоте вращения ротора. Далее скорость начнет снижаться до нуля по кривой 2-3.
5.7. Устойчивость работы асинхронного двигателя
Под устойчивостью работы электродвигателя понимают способность двигателя восстанавливать установившуюся частоту вращения при кратковременных возмущениях (изменениях нагрузки, напряжения питающей сети и пр.).
5.7.1 Факторы, определяющие устойчивость
Рассмотрим известное из механики условие равновесия моментов,
приложенных к ротору двигателя: |
|
||
M = Mс + J |
dω |
, |
(5.77) |
|
|||
|
dt |
|
|
где M - электромагнитный момент двигателя; M с |
- статический момент |
||
нагрузки (момент сопротивления механизма, приводимого во вращение, с
учетом механических потерь в двигателе); J |
dω |
- |
динамический момент, |
|||||||||
|
||||||||||||
|
|
|
|
|
|
|
|
dt |
|
|
|
|
зависящий от момента инерции вращающихся масс |
J |
и ускорения ротора |
||||||||||
|
dω |
|
|
|
|
|
|
|
||||
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
dt |
|
|
|
|
|
|
|
||||
|
|
При M = M с ускорение ротора |
|
|
|
|||||||
|
|
|
dω |
= |
M − Mс |
= 0, |
|
|
(5.77) |
|||
|
|
|
|
|
|
|
||||||
|
|
|
dt |
J |
Если M M с |
|
||||||
т. е. ротор вращается с установившейся частотой. |
ротор |
|||||||||||
ускоряется, а при M M с - замедляется. Устойчивость зависит от конкретных |
||||||||||||
условий, при |
которых работает электродвигатель, в |
частности от |
формы |
|||||||||
93

механических характеристик двигателя и приводимого им во вращение |
|||||||
производственного механизма. |
|
|
|
|
|
||
а) |
|
|
б) |
|
|
|
|
ω |
|
|
ω |
C |
|
M с |
|
2 |
|
|
ωа |
|
|
A |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
E |
|
|
1 |
|
|
|
|
1 |
|
|
|
ωb |
|
|
|
B |
|
3 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
M с |
0 |
|
D |
M |
|
|
|
|
|
||||
Рисунок 5.24 |
- |
Механические |
|
характеристики |
некоторых |
||
производственных механизмов (а) и графики для определения статической |
|||||||
устойчивости асинхронного двигателя (б) |
|
|
|
||||
На рис. 5.24, a для примера приведено несколько типичных механических |
|||||||
характеристик различных производственных механизмов. Для грузоподъемных |
|||||||
механизмов (кранов, |
лифтов, |
лебедок и |
т. |
п.) характерна |
неизменность |
||
статического момента M с (прямая 1 на рис. 5.24, а). Вентиляторы,
центробежные насосы, гребные винты и прочие механизмы имеют характеристику, при которой нагрузочный момент M с резко увеличивается с
ростом частоты вращения (кривая 2). Эту характеристику часто называют вентиляторной. Бетономешалки, шаровые мельницы и некоторые другие механизмы имеют большое трение в состоянии покоя и при малых частотах вращения, поэтому в таких механизмах с ростом частоты вращения
нагрузочный момент M с падает (кривая 3).
5.7.2 Устойчивость «в малом»
Рассмотрим работу асинхронного электродвигателя (механическая характеристика 1 на рис. 5.24, б), приводящего во вращение производственный
механизм, у которого статический (нагрузочный) момент M с падает с увеличением частоты вращения (механическая характеристика 2). В этом
94
случае условие M = M с выполняется в точках A и B при значениях частоты вращения ωa и ωb . Однако в точке B двигатель не может работать
устойчиво, так как при малейшем изменении момента M с (нагрузки) и
возникающем в результате этого отклонении частоты вращения от установившегося значения появляется избыточный замедляющий или ускоряющий момент ± (M − Mс), увеличивающий это отклонение.
Например, при случайном небольшом увеличении статического момента M с
ротор двигателя начинает замедляться, а его частота вращения ω -
уменьшаться. При работе машины в режиме, соответствующем точке B , т. е.
на участке B − D характеристики 1 , это приводит к уменьшению электромагнитного момента M , т. е. к еще большему возрастанию разности
M − M ст. В результате ротор продолжает замедляться до полной остановки.
При случайном уменьшении статического момента ротор начинает ускоряться,
что приводит к дальнейшему увеличению момента M и еще большему ускорению до тех пор, пока машина не переходит в режим работы,
соответствующий точке A. При работе машины в режиме, соответствующем точке A, двигатель работает устойчиво, так как при случайном увеличении момента M ст и замедлении ротора (т. е. уменьшении частоты вращения ω )
электромагнитный момент M возрастает. Когда момент M станет равным
новому значению M с, двигатель снова работает с |
установившейся, но |
|||
несколько меньшей частотой вращения. |
|
|
|
|
Таким образом, асинхронный двигатель |
при |
работе |
на участке |
|
C − A − E |
механической характеристики |
обладает, |
свойством |
|
внутреннего саморегулирования, благодаря которому его вращающий момент автоматически регулируется по закону M = M с. Это регулирование
осуществляется за счет увеличения или уменьшения частоты вращения ротора ω , т. е. система регулирования является статической.
Сравнивая условия работы двигателя в точках A и
вывод, что работа двигателя устойчива, если с увеличением частоты вращения ω статический момент M с уменьшается медленнее, чем
95
электромагнитный момент двигателя M . Это условие представим в
следующем виде:
|
dM |
|
dMс |
. |
(5.78) |
|
dω |
|
|||
|
|
dω |
|
||
Оно выполняется практически для всех механизмов с падающими |
|||||
характеристиками M с = f (ω) |
и с характеристиками, не зависящими от |
||||
частоты вращения (кривые 3 и 1 на рис. 5.24, а), если двигатель работает на участке C − A − E характеристики 1 (рис. 5.24, 6). Следовательно, двигатель, приводящий во вращение подобные механизмы, может устойчиво работать только в диапазоне изменения скольжения 0 s sк. При s sк, т. е. на участке
E − B − D механической характеристики 1, устойчивая работа становится невозможной.
При работе электродвигателя совместно с производственным механизмом, имеющим вентиляторную характеристику (рис. 5.24, а, кривая 2),
устойчивая работа возможна и на участке E − B − D механической характеристики 1, т. е. при s sк. Однако допускать работу при скольжениях,
больших критического, не следует. При этом резко уменьшается КПД двигателя, а потери мощности в его обмотках становятся настолько большими,
что могут за короткое время вывести двигатель из строя.
5.7.3 Устойчивость «в большом»
Практически условие (5.78) является необходимым, но недостаточным. В эксплуатации возможны не только кратковременные небольшие изменения
M с, но и существенные увеличения нагрузочного момента при резких изменениях режима работы. Когда двигатель работает при скольжении,
меньшем sк, но близком к |
нему, случайная |
перегрузка двигателя может |
|||||||||
привести к его остановке при |
M ст M к. Поэтому максимальный момент |
||||||||||
иногда называют опрокидывающим моментом. |
|
|
|
|
|
|
|
||||
При больших перегрузках устойчивость работы двигателя обеспечивают |
|||||||||||
путем выбора |
номинального |
момента M |
н |
M |
к |
. Отношение |
k |
м |
= |
M к |
, |
|
|||||||||||
|
|
|
|
|
|
|
M н |
||||
|
|
|
|
|
|
|
|
|
|
||
называемое |
перегрузочной |
способностью, |
|
регламентируется |
ГОСТ. |
||||||
96

Перегрузочная |
способность |
для |
различных |
двигателей |
различна: |
|||||
kм = 1.7 ÷ 3.5. |
Большие значения имеют двигатели, предназначенные для |
|||||||||
работы с большими перегрузками: крановые, металлургические и т. п. |
|
|||||||||
Увеличение перегрузочной способности асинхронного двигателя ведет к |
||||||||||
возрастанию его габаритов и массы или к снижению энергетических |
||||||||||
показателей. Из формулы (5.69) видно, что значение максимального момента |
||||||||||
приблизительно |
обратно |
пропорционально |
индуктивным |
сопротивлениям |
||||||
X + X |
' |
обмоток. Для |
увеличения |
перегрузочной |
способности |
двигателя |
||||
1 |
2 |
|
|
|
|
|
|
|
|
|
следует уменьшать эти сопротивления, т. е. числа витков обмоток статора и |
||||||||||
ротора. А это приводит к возрастанию магнитного потока (а, следовательно, к |
||||||||||
увеличению сечения магнитопровода) и тока холостого хода. Поэтому |
||||||||||
двигатели с повышенным значением kм имеют большие габариты и массу, а |
||||||||||
ток холостого хода у них достигает 40...60% от номинального тока. |
|
|||||||||
Большое значение для обеспечения устойчивой работы асинхронных |
||||||||||
двигателей имеет качество электроснабжения. Как следует из уравнений (5.60) |
||||||||||
и (5.69), вращающий момент асинхронного двигателя зависит от квадрата |
||||||||||
питающего напряжения. Поэтому даже незначительное уменьшение |
||||||||||
напряжения влияет на максимальный момент, а значительное уменьшение |
||||||||||
может вызвать остановку двигателя. |
|
|
|
|
|
|||||
|
|
ω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1, U1 = U н |
|
||
|
|
2, U1 = 0.7U н |
|
M к2 |
|
|
M к1 |
|
||
|
|
0 |
|
|
|
|
|
M |
|
|
Рисунок 5.25 - Механические характеристики асинхронного двигателя |
||||||||||
при различных напряжениях |
|
|
|
|
|
|
||||
На рис. 5.25 для примера приведены механические характеристики |
||||||||||
асинхронного двигателя при номинальном напряжении U1 = Uн (кривая 1) и |
||||||||||
|
|
|
|
|
|
97 |
|
|
|
|
напряжении U1 = 0.7Uн (кривая 2). Во втором случае электромагнитный
момент уменьшается примерно в два раза, и работа двигателя при номинальной нагрузке становится невозможной. В ГОСТ установлено, что длительное изменение напряжения в электрических сетях, питающих силовое оборудование, не должно отличаться от номинального значения более чем на
—5 и +10%.
98