

СКЕ / Лабораторный практикум
.pdfЛабораторная работа 5 Исследование переходных процессов при прямом пуске асинхронного
двигателя Цели и задачи исследования
Исследование переходных процессов при прямом пуске асинхронного двигателя:
|
построение фазовой траектории F |
M с учетом механических |
|
1 |
|
переходных процессов,
построение фазовой траектории F2 M с учетом механических и электромагнитных переходных процессов.
Программа выполнения работы
F M
1. Построение фазовой траектории 1 с учетом механических переходных процессов
Вариант исходных данных и все параметры асинхронного двигателя соответствуют уже рассчитанным в лабораторной работе 2 параметрам.
Дифференциальное уравнение движения электропривода:
M Mc Jp , |
(5.1) |
где M - электромагнитный момент двигателя, Нм; Mc - момент статической нагрузки, Нм; J - момент инерции двигателя, кГм2; - частота вращения
ротора, c 1.
Уравнение связи момента и скольжения:
M |
|
2M к |
|
, |
||
|
s |
|
sк |
|
||
|
|
sк |
s |
|
|
|
|
|
|
|
|
||
где Mк - |
критический момент двигателя, Нм; s - скольжение; |
|||||
критическое скольжение.
Скольжение и частота вращения ротора связаны уравнением:
s 1 ,o
(5.2)
sк -
(5.3)
41
где |
2 f1 |
- |
синхронная частота вращения, |
c 1; z |
p |
p |
- |
число |
||||
o |
|
z p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
полюсов; f1 - частота напряжения на статоре, Гц. |
|
|
|
|
|
|
||||||
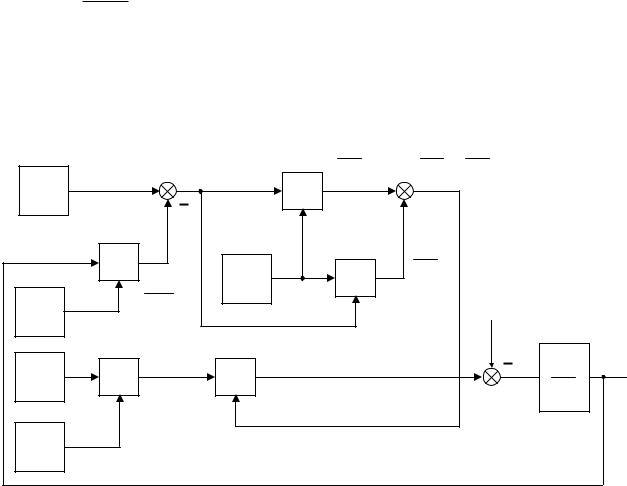
По выражениям (5.1) – (5.3) составим структурную схему асинхронного |
||||||||||||
двигателя с учетом механических переходных процессов (рис. 5.1). |
|
|
||||||||||
|
|
|
|
s |
|
s |
s |
sк |
|
|
|
|
|
|
|
|
|
sк |
sк |
s |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sк |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
sк |
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
o |
|
|
o |
|
|
|
Mc |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
2Mк |
|
M |
|
|
|
|
1 |
|
Mк |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
Jp |
|
|||
|
|
|
|
|
|
|
|
|
|
|
||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 5.1 - Структурная схема асинхронного двигателя с учетом |
||||||||||||
механических переходных процессов |
|
|
|
|
|
|
|
|||||
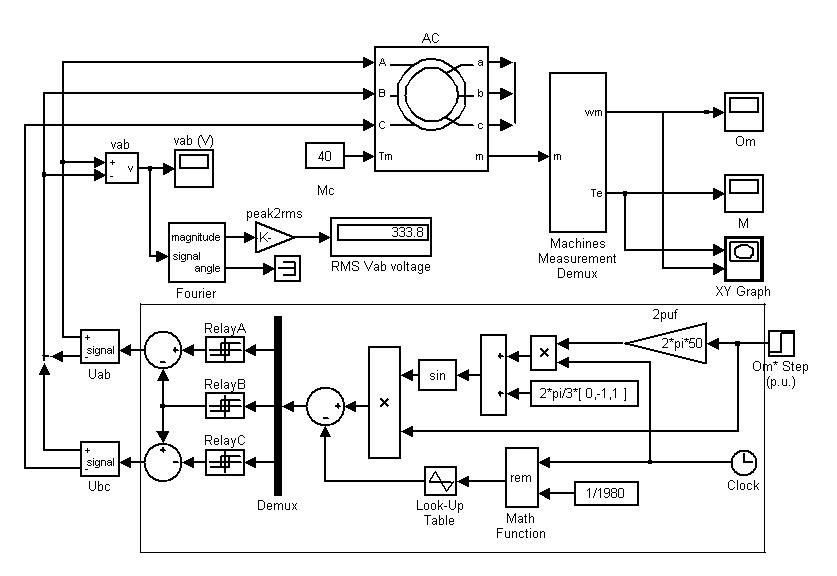
Структурная схема модели, соответствующая рис. 5.1, выполненная на |
||||||||||||
блоках Simulink пакета Matlab, изображена на рис. 5.2. Для получения фазовой |
||||||||||||
траектории |
F |
M |
применен XY |
Graph из |
библиотеки |
Sinks. Блоки |
||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
Constant находятся в библиотеке Sources, блоки Product - в библиотеке Math |
||||||||||||
Operations, блок Transfer Fnc - в библиотеке Continuous. |
|
|
|
|
|
|||||||
В соответствии с вариантом задания определить параметры типовых |
||||||||||||
блоков Simulink, соответствующих структурной схеме модели (рис. 5.2). |
|
|||||||||||
Момент статической нагрузки принять равным: |
|
|
|
|
|
|||||||
Mc Mн |
Pн |
, |
(5.4) |
||
o 1 |
sн |
||||
|
|
|
|||
42

Рисунок 5.2 - Структурная схема модели асинхронного двигателя с учетом механических переходных процессов
Время моделирования ориентировочно принять равным
tм 3 |
|
J o |
3 |
J o |
, |
(5.5) |
|
Mп Mc |
Mн kп 1 |
||||||
|
|
|
|
||||
где Mп - пусковой момент, Нм; kп - кратность пускового момента. |
|
||||||
Выполнить |
моделирование, вывести график фазовой |
траектории |
|||||
F M . |
|
|
|
|
|
||
1 |
|
|
|
|
|
|
|
2. Построение фазовой траектории F2 M с учетом механических и электромагнитных переходных процессов
В реальном асинхронном двигателе переходные процессы определяются не только механической, но и электромагнитной инерцией. В результате этого реальная фазовая траектория существенно отличает от траектории, полученной в разделе 1.
Математическое описание асинхронного двигателя с учетом электромагнитных переходных процессов достаточно громоздко и сложно. Поэтому при исследовании переходных процессов следует использовать раздел
Simulink - SimPowerSystem.
В разделе SimPowerSystem содержатся следующие основные библиотеки: библиотека соединений Connectors,
43
библиотека электрических источников Electrical Sources,
библиотека элементов электрических цепей Elements,
библиотека электрических машин Machines,
библиотека измерений Measurements
библиотека силовой электроники Power Electronics
На рис. 5.3 показана структурная схема модели асинхронного двигателя с учетом механических и электромагнитных переходных процессов. Схема реализована на блоках библиотек SimPowerSystem. При построении схемы
реализован закон частотного управления |
U1 |
const . Структурная схема |
|
||
|
f1 |
|
модели содержит: |
|
|
АИН - автономный инвертор напряжения (показан пунктиром);
АС - асинхронный короткозамкнутый двигатель;
Machines Measurement Demux - блок, в котором создается вектор
выходных характеристик асинхронного двигателя;
Uab, Ubc - блоки, конвертирующие сигналы Simulink в эквивалентные сигнал источника напряжения;
vab - блок для измерения напряжения;
Fourier - блок выделения из входного сигнала амплитуды и фазы
гармонических колебаний;
peak2rms - блок, определяющий действующее значение сигнала по амплитудному значению.
Для работы с моделью необходимо задать параметры асинхронного двигателя (блок АС ), момент статической нагрузки (блок Mc ) и задание на частоту вращения (блок Om * Step (p.u.)).
В блок Mc ввести момент статической нагрузки, равный номинальному моменту двигателя Mc Mн .
Поскольку управление АИН сформировано в относительных единицах, то в блок ввести «1», что соответствует заданию на частоту вращения ротора
o.
В блок АС ввести следующие параметры асинхронного двигателя:
44
АИН
Рисунок 5.3 - Структурная схема модели асинхронного двигателя с учетом механических и электромагнитных переходных процессов
45
Pн - номинальная мощность на валу, Вт;
Uн - номинальное напряжение, В;
f1н - номинальная частота питающего напряжения, Гц;
R1 - активное сопротивление статора, Ом;
|
L1 |
|
|
|
X1 |
|
|
- индуктивность рассеивания статора, Гн; |
||
2 f1н |
||||||||||
|
|
|
|
|
||||||
|
R' |
- активное сопротивление ротора, Ом; |
||||||||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
' |
|
|
|
|
||
|
L2 |
|
|
|
X 2 |
|
|
- индуктивность рассеивания ротора, Гн; |
||
|
2 f1н |
|||||||||
|
|
|
|
|
|
|||||
|
Lm |
|
X m |
|
xm - индуктивность намагничивающего контура, Гн; |
|||||
|
2 f1н |
|
||||||||
|
|
|
|
|
|
|
||||
Jдв - момент инерции двигателя, кГм2;
Mтр - момент трения, Нм;
z p p - число полюсов.
Время моделирования, в первом приближении, принять равным tм 0.5 с.
Выполнить моделирование, |
вывести |
график фазовой |
траектории |
||
F2 |
M . |
|
|
|
|
Проанализировать графики |
фазовых |
траекторий |
F |
M , |
|
|
|
|
|
1 |
|
F2 |
M , сделать выводы. |
|
|
|
|
3. Содержание отчета
3.1. Наименование работы, цели и задачи исследований. 3.2. Номер варианта. Исходные данные для расчета.
F M
3.3. Построение фазовой траектории 1 с учетом механических
переходных процессов.
3.3.1. Уравнения (5.1), (5.2), (5.3) с числовыми значениями коэффициентов.
46
3.3.2. Структурная схема модели асинхронного двигателя с учетом механических переходных процессов (рис. 5.2) с числовыми значениями коэффициентов.
F M
3.4. График фазовой траектории 1 .
3.4.1 Построение фазовой траектории F2 M с учетом электромагнитных переходных процессов.
3.4.2.Расчет параметров, вводимых в блоки Mc , Om * Step (p.u.), АС .
3.4.3.Структурная схема модели асинхронного двигателя с учетом механических и электромагнитных переходных процессов (рис. 5.3).
3.4.4.График фазовой траектории F2 M .
3.5. Анализ фазовых траекторий, выводы.
47
Лабораторная работа 6 Исследование переходных процессов при частотном скалярном управлении
скоростью асинхронного двигателя Цели и задачи исследования
Исследование переходных процессов при частотном скалярном управлении скоростью асинхронного двигателя:
скалярное управление с положительной обратной связью по току,
скалярное управление с отрицательной обратной связью по скорости.
Программа выполнения работы 1. Исследование переходных процессов при скалярном управлении с
положительной обратной связью по току (скалярная IR -компенсация)
Вариант исходных данных и все параметры асинхронного двигателя соответствуют уже рассчитанным в лабораторной работе 2 параметрам.
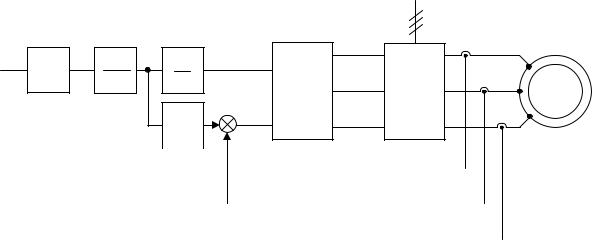
Структурная схема системы управления со скалярной IR -компенсацией приведена на рис. 6.1.
|
|
|
|
|
|
|
|
~ U1 |
U з |
|
з |
f з |
|
|
U уА |
M |
|
|
ЗИ |
1 |
1 |
|
U |
|
|
|
|
|
|
уB |
|
||||
|
2 |
p |
|
|
|
|||
|
|
Uр |
ПК |
|
АИН |
|||
|
|
|
|
U уC |
||||
|
|
|
ФП |
|
Uу |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
Uir |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
iA |
||||||||
|
|
|
|
|
Kir R1 |
|
I1 |
ФПТ |
||||
|
|
|
|
Tir p 1 |
|
|
|
|
||||
|
|
|
|
|
iB |
|||||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
iC |
|||
|
|
|
|
|
|
|
|
|
||||
Рисунок 6.1 - Структурная схема частотного управления со скалярной |
||||||||||||
IR -компенсацией |
|
|
|
|
|
|||||||
Задатчик интенсивности ЗИ формирует |
кривую разгона двигателя. |
|||||||||||
Сигналу задания U з соответствует задание на частоту |
fз . Функциональный |
|||||||||||
48

преобразователь ФП формирует требуемую зависимость между частотой и
напряжением преобразователя, устанавливая один из законов управления E1 .
f1
При скалярной IR -компенсации сигнал управления U y является суммой сигнала регулирования U p и сигнала положительной обратной связи по току
Uir : |
|
|
U y U p Uir U p Kir R1I1. |
(6.1) |
|
где Kir - коэффициент положительной обратной связи по току; |
R1 - активное |
|
сопротивление обмоток статора; I1 - сигнал, пропорциональный действующим |
||
значениям токов iA , iB , iC обмоток статора двигателя. |
|
|
Сигнал управления U y |
является входным сигналом |
для прямого |
координатного преобразователя |
ПК , на выходе которого формируются три |
|
синусоидальных напряжения управления U yA , U yB , U yC , сдвинутые друг
относительно друга на угол 120o, с амплитудами, напряжению управления. Сигналы U yA , U yB , U yC
напряжения на выходе автономного инвертора напряжения
Интенсивность IR -компенсации зависит от параметров апериодического звена, установленного в цепи положительной обратной связи по току:
W ( p) |
Kir R1 |
. |
(6.2) |
|
|||
т |
Tir p 1 |
||
|
|
||
где Tir - постоянная времени задержки контура тока, с.
На рис. 6.2 показана структурная схема модели скалярного управления скоростью асинхронного двигателя с положительной обратной связью по току. Схема реализована на блоках библиотек SimPowerSystem. Структурная схема модели содержит:
АИН - автономный инвертор напряжения (показан пунктиром);
АС - асинхронный короткозамкнутый двигатель;
Machines Measurement Demux - блок, в котором создается вектор
выходных характеристик асинхронного двигателя;
49
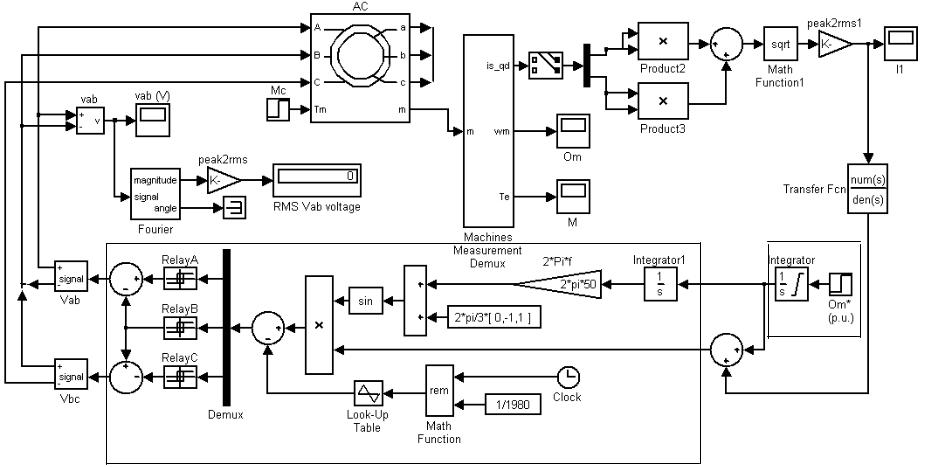
ЗИ
АИН
Рисунок 6.2 - Структурная схема модели асинхронного двигателя с учетом механических и электромагнитных переходных процессов
50