

СКЕ / Лабораторный практикум
.pdf3. Работа с комплексными числами в среде MathCad
Особенности записи и работы с комплексными числами в среде MathCad. Комплексное число записывается в виде:
A a ib ,
где a - действительная часть комплексного числа; b - мнимая часть комплексного числа; i ( j) - мнимая единица.
После определения комплексных чисел дальнейшие действия не отличаются от обычных вычислений:
сложение комплексных чисел C A B ,
вычитание комплексных чисел C A B ,
умножение комплексных чисел C A B ,
деление комплексных чисел C BA .
Операции с комплексными числами:
C - модуль комплексного числа,
arg C - фаза комплексного числа,
Re C - действительная часть комплексного числа,
Im C - мнимая часть комплексного числа
При задании комплексного числа в экспоненциальной форме необходимо учитывать, что все вычисления в среде MathCad производятся в радианах.
Переход от угла, заданного в градусах к углу, заданному в радианах:
рад |
град |
|
|
(1.3) |
||
|
. |
|
||||
|
|
|
||||
|
|
180 |
|
|
|
|
Переход от угла, заданного в радианах к углу, заданному в градусах: |
|
|||||
град |
рад 180 |
. |
(1.4) |
|||
|
||||||
|
||||||
|
|
|
|
|||
4. Порядок выполнения работы
4.1. В соответствии с заданием (приложение 1) определить: комплекс сопротивления ветви 1
11
. |
(1.5) |
|
Z1 R1 jX L1 jXC1, |
||
|
||
комплекс сопротивления ветви 2 |
|
|
. |
(1.6) |
|
Z 2 R2 jX L2 jXC2, |
||
|
||
комплекс сопротивления ветви 3. |
|
|
. |
(1.7) |
|
Z3 R3 jX L3 jXC3. |
||
|
4.2. Входное комплексное сопротивление цепи определить в соответствии со схемой смешанного соединения, заданного в задании.
. |
|
|
. . |
|
. |
|
|
|
Z F Z , Z |
2 |
, Z |
3 |
. |
(1.8) |
|||
|
|
|
1 |
|
|
|
||
|
|
|
|
|
|
|
|
|
4.3. Ток в неразветвленной части цепи рассчитывается как |
|
|||||||
. |
. |
|
|
|
|
|
|
|
U |
|
|
|
|
|
|||
|
|
|
|
|
|
|||
I |
|
. |
|
|
|
|
(1.9) |
|
. |
|
|
|
|
||||
Z
4.4.Определить напряжения на неразветвленных участках цепи и токи в отдельных ветвях.
4.5.Определить мгновенные значения токов.
4.6.Определить активную, реактивную и полную мощности, потребляемые из сети.
Все вычисления выполнить в среде MathCad.
4.7.По рассчитанным токам построить в масштабе их векторную диаграмму. Пример построения векторной диаграммы токов показан на рис. 1.2.
4.8. Построить в масштабе топографическую диаграмму напряжений для электрической цепи, указанной в задании. Для ее построениям вычислить
падения напряжения на отдельных элементах цепи: URi , ULi , UCi . Пример
построения векторной диаграммы токов и топографической диаграммы напряжений изображен на рис. 1.3.
12
5. Исследование процессов в однофазной цепи переменного тока
5.1. Исследование процессов выполняется в приложении Simulink Power System пакета Matlab.
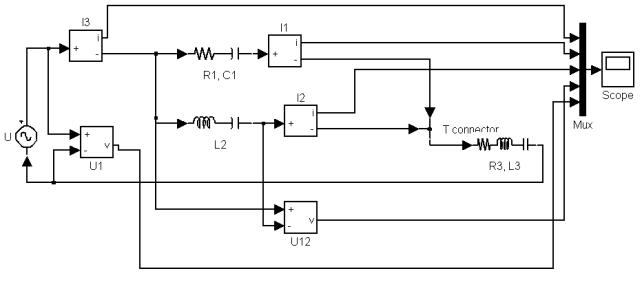
На рис. 1.4 дана схема модели, реализованная на элементах SimPowerSystem, соответствующая однофазной цепи, рассмотренной на рис. 1.1.
Рисунок 1.4 – Модель однофазной цепи, реализованная на элементах
SimPowerSystem
Первая ветвь R1, C1, вторая ветвь L2 , третья ветвь R3, L3 реализованы
на элементах последовательной RLC ветви Series RLC Branch , входящих в библиотеку SimPowerSystem.
Источник однофазного переменного напряжения U выполнен на элементе AC Voltage Source .
Для соединения ветвей использован соединитель T connector .
Для определения напряжения источника U , напряжения на
неразветвленном участке U |
и токов I , I |
2 |
, I |
3 |
использованы измерители |
|||||
|
12 |
|
1 |
|
|
|
|
|
||
напряжения Voltage Measurment и тока Current Measurment . |
|
|
||||||||
При задании |
параметров |
ветвей |
необходимо учитывать, |
что |
в |
|||||
Series RLC Branch |
задаются |
не индуктивное |
сопротивление |
X L |
и |
|||||
емкостное сопротивление XC , |
а, |
индуктивность L и емкость C . |
Значения |
|||||||
индуктивности и емкости определятся по формулам:
13

L |
|
X L |
, |
|
(1.10) |
|
2 f |
||||||
|
|
|
|
|||
C |
1 |
|
. |
(1.11) |
||
|
|
|
||||
|
|
|
||||
|
|
2 fXC |
|
|||
5.2. В соответствии со схемой однофазной цепи переменного тока, приведенной в задании, составить модель, аналогичную модели, показанной на рис. 1.4.
5.3. В соответствии с вариантом ввести необходимые значения напряжения, активного сопротивления, индуктивности и емкости. При вводе напряжения источника необходимо учитывать, что для синусоидальной величины задается амплитудное значение, а в задании дано действующее значение.
5.4. Одновременно вывести на осциллограф напряжение питания U и токи всех ветвей.
5.5. Длительность моделирования должна быть равна трем периодам питающего напряжения.
tмод 3T |
3 |
с. |
(1.12) |
|
f |
||||
|
|
|
5.6. По графикам определить сдвиг по фазе каждого из токов относительно напряжения питания U .
На графиках сдвиг по фазе определяется в секундах. Период одного колебания синусоидального тока равен T 1f с, что составляет 360o . В этом случае сдвиг по фазе, измененный в градусах, будет равен:
град |
сек 360 |
. |
(1.13) |
|
Т |
||||
|
|
|
Сравнить данные сдвига по фазе для токов всех ветвей с результатами расчетов в MathCad.
6. Содержание отчета
6.1. Наименование работы, цели и задачи исследований.
6.2. Номер варианта. Схема электрической однофазной цепи. Исходные данные для расчета.
6.3. Листинг расчета в MathCad:
14
комплексные сопротивления всех ветвей,
входное комплексное сопротивление,
комплексное значение тока в неразветвленной части цепи,
комплексное значение напряжение на неразветвленном участке цепи,
комплексные значения тока во всех ветвях.
6.4. Мгновенные значения токов равны.
6.5. Активная, реактивная и полная мощности, потребляемые из сети. 6.6. Векторная диаграмма токов 6.7. Расчет комплексов падений напряжений на элементах цепи.
6.8. Векторная диаграмма токов и топографическая диаграмма напряжений.
6.9. Модель однофазной цепи, реализованная на элементах
SimPowerSystem.
6.10. Расчеты L , C , tмод .
6.11. Графики изменения питающего напряжения и токов всех ветвей. 6.12. Результаты сравнения сдвига по фазе для токов всех ветвей,
полученных в результате расчетов в среде MathCad и в результате моделирования в среде Simulink.
15
Лабораторная работа 2 Построение механических и энергомеханических характеристик асинхронного
двигателя
Цели и задачи исследования
Расчет механических характеристик асинхронного двигателя по параметрам схемы замещения и каталожным данным:
расчет параметров схемы замещения; определение мощности, потребляемой из сети;
построение механической и энергомеханической характеристик на основании схемы замещения;
расчет параметров механической характеристики по данным каталога и по схеме замещения;
построение механических характеристик;
построение векторной диаграммы токов, ЭДС и напряжений при номинальной нагрузке.
Программа выполнения работы
1.Расчет параметров схемы замещения; определение потребляемой мощности
1.1.Расчет параметров Г-образной схемы замещения
Вариант исходных данных и все параметры асинхронного двигателя приведены в приложении 2. Все двигатели рассчитаны на напряжение
питающей сети: фазное напряжение |
Uн 220 В, линейное напряжение |
U лн 380 В. Номинальная частота тока |
f1н 50 Гц. Число фаз m 3. |
В каталогах на асинхронные двигатели приводятся следующие параметры.
Номинальные данные:
Pн - номинальная мощность на валу, кВт;
Uн - номинальное напряжение, В;
н - номинальный КПД,
cos н - сдвиг по фазе в номинальном режиме,
m - число фаз,
p - число полюсов,
16
f - частота питающего напряжения, Гц;
kn - кратность пускового момента,
kmin - кратность минимального момента,
km - кратность максимального момента,
sн - номинальное скольжение,
sк - критическое скольжение,
in - кратность пускового тока,
Jдв - момент инерции двигателя, кГм2,
Параметры Г-образной упрощенной схемы замещения в относительных единицах:
r1 - активное сопротивление статора,
x1 - индуктивное сопротивление рассеивания статора,
r2' - активное сопротивление ротора,
x'2 - индуктивное сопротивление рассеивания ротора,
xm - индуктивное сопротивление намагничивающего контура.
Параметры Г-образной схемы замещения даны в относительных единицах. Для их перевода в абсолютные единицы необходимо определить номинальный ток и базовое сопротивление:
I1н |
|
|
Pн |
, А |
(2.1) |
|||
mUн cos н н |
||||||||
|
|
|
|
|
|
|||
Z |
б |
|
Uн |
, Ом. |
|
(2.2) |
||
|
|
|||||||
|
|
|
Iн |
|
||||
|
|
|
|
|
|
|||
С учетом формулы (2.2) параметры Г-образной упрощенной схемы |
||||||||
замещения в абсолютных единицах определятся: |
|
|||||||
R1 r1Zб , Ом; |
|
(2.3) |
||||||
X1 x1Zб , Ом; |
|
(2.4) |
||||||
|
' |
|
|
' |
|
|
(2.5) |
|
R2 |
r2Zб , Ом; |
|
|
|||||
|
' |
|
|
' |
|
|
(2.6) |
|
X2 |
x2Zб , Ом; |
|
|
|||||
17
Xm xmZб , Ом. |
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.7) |
||||
Г-образной упрощенной схемы замещения в абсолютных единицах |
||||||||||||||||||
изображена на рис. 2.1. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
. |
|
|
|
|
|
|
|
|
|
|
' |
|
|
|
R'2 |
|||
|
I1 |
|
|
|
R1 |
|
X1 |
|
|
|
||||||||
|
|
|
|
|
X 2 |
|
|
|
|
|||||||||
|
s |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Z1 |
|
|
|
|
|
|
' |
|
|
|
|
|
|
|
|
||
. |
|
|
|
|
. |
|
|
I2 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||||||||
U н |
|
|
|
I o |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
X m 
Рисунок 2.1 - Г-образной упрощенная схема замещения в абсолютных единицах
. |
|
||
На рис. 2.1 комплекс полного сопротивления статора Z1 R1 jX1. |
|||
По номинальным данным определяются число полюсов z p , |
синхронная |
||
частота вращения o и номинальный ток, потребляемый из сети I1н : |
|||
z p p , |
(2.8) |
||
o |
2 f |
, с 1. |
(2.9) |
|
|||
z p
Расчеты по пунктам (2.1) – (2.9) выполнить в среде MathCad.
1.2. Расчет мощности, потребляемой из сети
Активная, реактивная и полная мощности, потребляемые из сети в
номинальном режиме работы, определяются по формулам: |
|
||||||||
P |
mU |
|
I |
cos |
Вт; |
|
|
|
(2.10) |
1н |
|
н 1н |
н |
|
|
|
|
|
|
Q |
mU |
I |
sin arccos cos |
н |
|
, Вар; |
(2.11) |
||
1н |
|
|
н 1н |
|
|
|
|
|
|
S1н mUнI1н , ВА. |
|
|
|
|
(2.12) |
||||
Расчеты по пунктам (2.10) – (2.12) выполнить в среде MathCad.
18
2. Построение механической и энергомеханической характеристик
Уравнение механической характеристики представляет собой
зависимость скольжения s (частоты вращения ) от момента M : |
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
' |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 R2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
mUн |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
М |
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
, Нм. |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
' |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.13) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|||||
|
|
|
|
R |
|
R2 |
|
|
|
|
|
X |
|
X |
' |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
||||||||||||||||
|
|
|
o |
1 |
|
|
s |
|
|
|
|
|
|
1 |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Энергомеханические характеристики представляю собой зависимость |
|||||||||||||||||||||||||||||
токов I |
статора и ротора I ' |
|
от скольжения |
s . |
|
|
|
||||||||||||||||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
' |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ток I2 вычисляется по формуле: |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
' |
|
|
|
|
|
|
|
|
|
|
Uн |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
I2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, А. |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
' |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
(2.14) |
||||||||
|
|
|
R |
R2 |
|
|
|
|
X |
X |
' |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
1 |
|
s |
|
|
|
|
|
|
1 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ток |
|
I |
является |
векторной |
|
суммой токов ротора |
I |
' |
и тока |
||||||||||||||||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
||
намагничивания Io . Модуль тока статора в этом случае будет равен:
I1 |
2 |
' 2 |
|
|
|
' |
|
|
|
(2.15) |
||||
Io I2 |
2IoI2 sin 2 , А. |
|
|
|||||||||||
|
|
|
|
|
|
|
X |
X |
' |
|
|
|
|
|
где sin 2 |
|
|
|
|
|
|
|
1 |
|
2 |
|
|
|
- сдвиг по фазе тока ротора. |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
R' |
|
2 |
' |
|
2 |
||||||
|
|
|
|
|
|
|
|
|||||||
|
|
R1 |
|
|
2 |
|
X1 X 2 |
|
|
|
|
|||
|
|
|
|
|
|
|||||||||
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Механическую и энергомеханические характеристики в соответствии с уравнениями (2.13) – (2.15) для двигательного режима работы построить на одном графике в среде MathCad.
19

3. Расчет параметров механической характеристики
Механическая характеристика асинхронного двигателя (рис. 2.2) имеет характерные точки:
Точка идеального холостого хода o, s 1, M 0 ,
Точка номинального режима н, s sн, M Мн ,
Точка критического момента к , s sк , M Мк ,
Точка минимального момента min, s smin, M Мmin , Точка короткого замыкания 0, s 1, M Мп .
|
М н |
|
o |
|
|
|
|
|
н |
|
|
к |
М к |
|
|
|
|
min |
Мmin |
|
|
|
|
|
М п |
М |
|
|
|
Рисунок 2.2. - Механическая характеристика асинхронного двигателя |
||
3.1.Расчет характерных точек по параметрам схемы замещения.
3.1.1.Точка идеального холостого хода, o, s 1, M 0
Частота вращения при идеальном холостом ходе рассчитывается по формуле (2.9):
|
|
2 f |
, с 1. |
|
|
(2.16) |
|||
o |
|
z p |
|
|
|
|
|
|
3.1.2. Точка критического момента кр , s sкр , M Мкр :
20