

Приклади афінних перетворень
Приклад 1. Повернути трикутник АВС з координатами (3;-1), (4;1), (2;1) на 90о проти часової стрілки відносно початку координат.
Використовуючи матрицю координат 3х2 та формули повороту отримаємо:
 .
.

Рис. 6 Поворот
трикутника АВС в

Приклад 2.
Відобразити трикутник DEF з координатами
(8;1), (7;3), (6;2) спочатку відносно осі Y=0
у трикутник
 ,
а потім відносно прямоїx=y
у трикутник
,
а потім відносно прямоїx=y
у трикутник
 .
.
Відображення відносно осі Y=0:
 .
.
Відображення відносно прямої x=y:
 .
.

Рис. 7 Відображення трикутника DEF
Приклад 3.
Нехай задано трикутник ABC з координатами (2;2), (4;2), (4;4). Знайти координати нового трикутника, повернутого на 90о відносно початку координат та відображеного відносно прямої y=-x.
Перша матриця повороту має вигляд:

Матриця відображення відносно y=-x відповідно рівна:

Результатом повороту та відображення координат K трикутника ABC будуть координати K*:
 ,
,
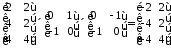 .
.
Якщо провести
перетворення в оберненому порядку
(спочатку відображення, а потім поворот),
то отримаємо трикутник
 :
:
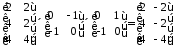 .
.

Рис. 8 Комбінований
поворот та відображення трикутника ABC
( –
проміжний трикутник прямої задачі,
–
проміжний трикутник прямої задачі, –
проміжний трикутник оберненої задачі)
–
проміжний трикутник оберненої задачі)
Приклад 4. Побудувати матрицю повороту точки M(x, y) відносно довільної точки N(m, n) на кут ϕ у додатному напрямку.
Однорідні координати дають можливість знайти матрицю повороту відносно довільної точки. У загальному випадку поворот відносно довільної точки може бути реалізований шляхом таких перетворень:
переміщення точки N(m, n) на вектор (–m, –n) так, щоб центр повороту сумістився з початком координат. Матриця цього перетворення має вигляд:

поворот точки на кут ϕ у додатному напрямку відносно початку координат. Матриця цього перетворення визначається формулою:

Отже, для знаходження результуючого повороту точки M(x, y) відносно точки N(m, n) потрібно перемножити задані матриці за вказаним порядком:
[X,Y,1]
=[x,y,1]


 .
.
Приклад 5.
Нехай задано рівняння прямої L
 та трикутник ABC з координатами вершин
(2,4,1), (4,6,1), (2,6,1). Дзеркально відобразити
трикутник відносно даної прямої.
та трикутник ABC з координатами вершин
(2,4,1), (4,6,1), (2,6,1). Дзеркально відобразити
трикутник відносно даної прямої.
Пряма L
пройде через
початок координат під час зсуву її на
2 одиниці по осі ОY
(матриця зсуву матиме вигляд –
 ).
В результаті повороту навколо початку
координат на
).
В результаті повороту навколо початку
координат на пряма співпаде з віссюОХ
(матриця
повороту матиме вигляд –
пряма співпаде з віссюОХ
(матриця
повороту матиме вигляд –
 ).
Далі необхідно дзеркально відобразити
об’єкт за допомогою матриці дзеркального
відображення
).
Далі необхідно дзеркально відобразити
об’єкт за допомогою матриці дзеркального
відображення і повернутись в початкову орієнтацію.
Комбінація перетворень матиме вигляд:
і повернутись в початкову орієнтацію.
Комбінація перетворень матиме вигляд:




 =
= .
.
Отже, координати нового трикутника матимуть будуть такими:

 =
= .
.
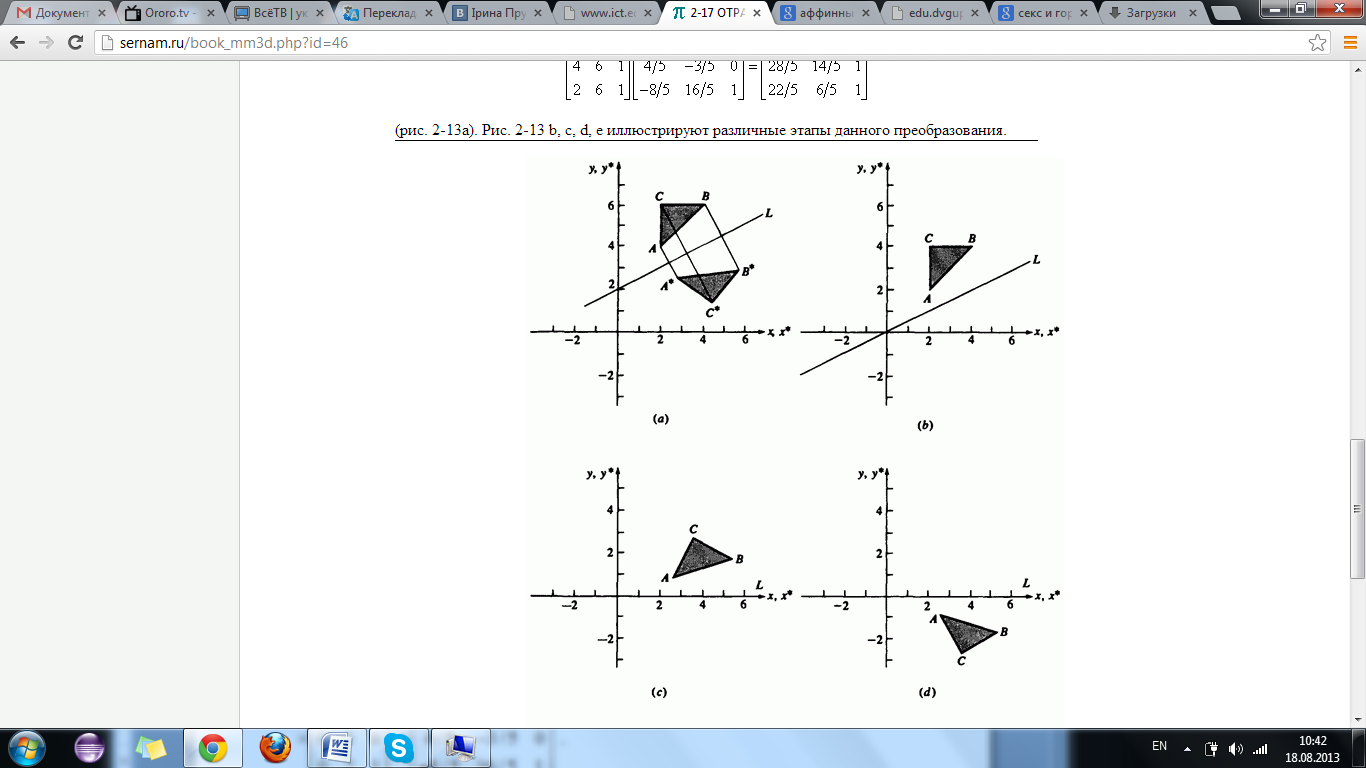
а) б)

в) г)

д)
Рис 9. Відображення відносно будь-якої кривої а)початкове та кінцеве положення трикутника; б)зсув прямої в початок координат; в)поворот прямої та її спів падіння з віссю ОХ; г) відображення відносно осі ОХ; д) обернений поворот.
Висновки
Ідея опису точки вектором виникла з геометричних уявлень. Теореми геометрії розвивалися для афінної геометрії з часом. У них важливими є поняття паралельності і співвідношення між паралельними прямими.
Афінне перетворення є комбінацією лінійних перетворень, супроводжуваних переносом зображень. Афінні перетворення формують зручну підсистему білінійних перетворень, тому що добуток двох афінних перетворень також є афінним. Це дозволяє представити узагальнену орієнтацію системи точок стосовно довільної координатної системи при збереженні одиничного значення однорідної координати h.
Отже, афінні перетворення найбільш часто використовуються в комп'ютерній графіці. І як було показано, вони значно спрощують масштабування, поворот і зсув зображень.