

Аналитический способ сложения сил
Теорема: проекция вектора суммы на какую-нибудь ось равна алгебраической сумме проекций слагаемых векторов на ту же ось.
Е



 слиR
= F1
+ F2
+ F3
+ … + Fn,
причем (F1x,
F1y,
F1z),
(F2x,
F2y,
F2z),
…, (F3x,
F3y,
F3z)
– наборы проекций этих векторов на оси
X,
Y
и Z
то
слиR
= F1
+ F2
+ F3
+ … + Fn,
причем (F1x,
F1y,
F1z),
(F2x,
F2y,
F2z),
…, (F3x,
F3y,
F3z)
– наборы проекций этих векторов на оси
X,
Y
и Z
то
Rx = F1x + F2x + F3x + … + Fnx = Fix;
Ry = F1y + F2y + F3y + … + Fny = Fiy;
Rz = F1z + F2z + F3z + … + Fnz = Fiz;
Модуль результирующей силы:
![]() .
.
Н аправление
результирующего вектораR
определяется направляющими косинусами:
аправление
результирующего вектораR
определяется направляющими косинусами:
![]() ;
;
![]() ;
;
![]() .
.
П

 ример
1. Определить результирующую силу трех
силF1,
F2,
F3
проекции которых заданы: F1(3;3),
F2(6;-2),
F3(-5;-3).
Силы заданы в Ньютонах (рис. 2.4).
ример
1. Определить результирующую силу трех
силF1,
F2,
F3
проекции которых заданы: F1(3;3),
F2(6;-2),
F3(-5;-3).
Силы заданы в Ньютонах (рис. 2.4).
Р ешение:
ешение:
Rx = 3 + 6 – 5 = 4H; Ry = 3 – 2 – 3 = -2H;
М
Рис. 2.4![]()
Направляющие косинусы:
![]()
![]()
Ответ: R = 4,5H; = 63o; = 27o.
Пример 2. Задана плоская система сил, действующая на точку А. F1 = 15Н; F2 = 10Н. Определить равнодействующую силу (рис. 2.5).
Р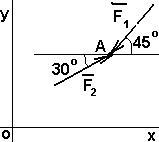 ешение:
ешение:
Определим сумму проекций данных сил на оси OX и OY:
Ось OX:
![]()
О
Рис. 2.5![]()
Подставляя численные значения получим:
Rx = 19,1Н; Ry = -5,5Н.
Модуль
равнодействующей:![]()
Направляющие
косинусы:
![]() ;
;
![]() .
.
Ответ: R = 19,9H; = 74o; = 16o.
Равновесие системы сходящихся сил
Система сходящихся сил – это силы, сходящиеся в одной точке (рис. 2.6).
Геометрическое условие равновесия. Для равновесия системы сходящихся сил необходимо и достаточно, чтобы силовой многоугольник, построенный на этих силах, был замкнут.
А
Рис. 2.6
Fkx = 0; Fky = 0; Fkz = 0.
Теорема о трех силах. Если свободное твердое тело находится в состоянии равновесия под действием трех непараллельных сил, лежащих в одной плоскости, то линии действия этих сил пересекаются в одной точке.
F

 1
+ F2
+ F3
= 0
1
+ F2
+ F3
= 0
Системы статически определимые и статически неопределимые
Задача статики может быть решена лишь в том случае, когда для нее число неизвестных реакций связей не превышает число уравнений равновесия, содержащих эти реакции. Такие задачи называют статически определенные, а система тел, для которых это имеет место – статически определимыми системами.
Задачи, в которых число неизвестных реакций связей больше числа уравнений равновесия, содержащих эти реакции, называются статически неопределенные, а система тел для которых это имеет место – статически неопределимыми системами.
П
Рис. 2.7
Решение задач статики
Для решения задач статики необходимо:
Выбрать тело, равновесие которого должно быть рассмотрено.
Освобождение тела от связей и изображение действующих на него заданных сил и реакций отброшенных связей.
Составление уравнений равновесия.
Определение искомых величин, проверка правильности решения и исследование полученных результатов.
Для решения задач на равновесие тела под действием сходящихся сил можно использовать следующие способы:
а )
Геометрический способ. Применяется
если число сил, действующих на тело
равно трем. При равновесии треугольник,
построенный на этих силах, должен быть
замкнутым.
)
Геометрический способ. Применяется
если число сил, действующих на тело
равно трем. При равновесии треугольник,
построенный на этих силах, должен быть
замкнутым.
б) Аналитический способ. Применяется при любом количестве сил, действующих на тело. В случае плоской системы сходящихся сил составляется два уравнения равновесия, а в случае пространственной системы сил – три.
Рис. 2.8а
П

 ример
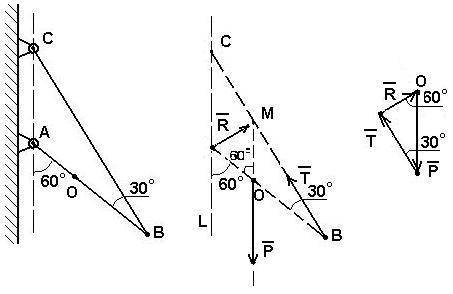
№3. К вертикальной гладкой стене АВ
подвешен на тросе АС однородный шар.
Трос составляет со стеной угол,
сила тяжести шара Р. Определить силу
натяжения троса Т и давление шара на
стену Q.
Шар находится в равновесии под действием
этих трех сил (рис. 2.8а).
ример
№3. К вертикальной гладкой стене АВ
подвешен на тросе АС однородный шар.
Трос составляет со стеной угол,
сила тяжести шара Р. Определить силу
натяжения троса Т и давление шара на
стену Q.
Шар находится в равновесии под действием
этих трех сил (рис. 2.8а).
Решение.
Р
 ассмотрим
решение задачи геометрическим
(графическим) способом. Так как шар
находится в равновесии под действием
трех сил, то эти силы сходящиеся. Точка,
в которой сходятся эти силы, является
геометрическим центром шара (точка О).
Построим силовой треугольник (рис.
2.8б). Построение начинают с известной
силы Р.
ассмотрим
решение задачи геометрическим
(графическим) способом. Так как шар
находится в равновесии под действием
трех сил, то эти силы сходящиеся. Точка,
в которой сходятся эти силы, является
геометрическим центром шара (точка О).
Построим силовой треугольник (рис.
2.8б). Построение начинают с известной
силы Р.
Силовой треугольник
должен быть замкнут. В данном случае
это прямоугольный треугольник. Тогда:
![]() ;
;
![]()
О
Рис. 2.8б![]() ;
;
![]() .
.
П
А
а)
б)
в)
Рис. 2.9
Р
Определим силы, действующие на данную конструкцию:
Р – сила тяжести стержня АВ, так как стержень однородный, то сила приложена к его геометрическому центру (точка О).
Т – натяжение троса СВ, направлено вдоль СВ.
R – реакция в шарнире А (направление неизвестно) (рис. 2.9б).
Согласно принципу освобождаемости от связей, заменим связи соответствующими реакциями.
Так как система находится в равновесии под действием трех сил, то эти силы должны сходиться, а поэтому сила реакции R направлена от А к М (точка пересечения сил Р и Т).
Построим силовой треугольник. Для этого выберем произвольную точку О и отложим от нее известную силу Р, сохраняя ее направление. Из конца вектора Р под углом 300 проведем луч, который соответствует направлению силы Т (рис. 2.9в).
Так как <LAO = <AOM (как накрест лежащие углы), то угол <MOB = 1800 - 600 = 1200, тогда <OMB = 1800 – (1200 + 300) = 300, т.е. треугольник ОМВ равнобедренный: сторона ОМ = ОВ. Поэтому ОМ = ОВ = ОА, так как О является серединой АВ, а угол <АOM = 600, то треугольник АОМ является равносторонним. Поэтому <OАM = 600 = <AMO. Из точки О проводим луч под углом 600 к направлению силы Р до пересечения с направлением силы Т. Полученный треугольник прямоугольный, поэтому R = Psin300 = 20/2 = 10H.
Ответ: R = 10H.
Пример №5. Три груза А, В и С массой 10, 20, и 60 кг соответственно лежат на плоскости, наклоненной под углом к горизонту (рис. 2.10). Грузы соединены тросами, как показано на рисунке. Коэффициенты трения между грузами и плоскостью равны А = 0,1, В = 0,25, С = 0,5 соответственно.
Определить угол , при котором тела равномерно движутся вниз по плоскости. Найти также натяжение тросов ТАВ и ТВС.
Р ешение:
ешение:
Р
а)
б)
в)
г)
Рис. 2.10
с






 умма
всех сил, действующих на тело равна
нулю. На тело А действует сила тяжести
РА,
сила реакции опоры NА,
сила трения FтрА
и сила натяжения троса ТАВ
(рис. 2.10б).
Условие равновесия: РА
+ NА
+ FтрА
+ ТАВ
= 0.
умма
всех сил, действующих на тело равна
нулю. На тело А действует сила тяжести
РА,
сила реакции опоры NА,
сила трения FтрА
и сила натяжения троса ТАВ
(рис. 2.10б).
Условие равновесия: РА
+ NА
+ FтрА
+ ТАВ
= 0.
Выберем систему координат и спроектируем силы на оси:
Ось ОХ РАsin - РАcos - ТАВ = 0.
Подставляя численные значения получим: 10sin - cos - ТАВ = 0.
Р








 ассмотрим,
какие силы действуют на тело В: РВ
- сила тяжести, FтрВ
- сила трения, ТВА-
сила натяжения троса со стороны груза
А, ТВС
- сила натяжения троса со стороны груза
С, NВ
- сила реакции опоры (рис. 2.10в). Тогда
условие равновесия будет: РВ
+ NВ
+ FтрВ
+ ТВА
+ ТВС
= 0.
ассмотрим,
какие силы действуют на тело В: РВ
- сила тяжести, FтрВ
- сила трения, ТВА-
сила натяжения троса со стороны груза
А, ТВС
- сила натяжения троса со стороны груза
С, NВ
- сила реакции опоры (рис. 2.10в). Тогда
условие равновесия будет: РВ
+ NВ
+ FтрВ
+ ТВА
+ ТВС
= 0.
Проектируя это уравнение на ось ОХ, получим:
РВsin - FтрВ + ТВА - ТВС = 0; учитывая, что ТВА = ТАВ:
РВsin - РВcos*В + ТВА - ТВС = 0;
30sin - 30cos*0.25 + ТВА - ТВС = 0;
Н


 а
тело С действуют следующие силы: РС
- сила тяжести, FтрС
- сила трения, ТСВ-
сила натяжения троса со стороны груза
В, NС
- сила реакции опоры (рис. 2.10г). Тогда
условие равновесия при проектировании
на ось ОХ будет:
а
тело С действуют следующие силы: РС
- сила тяжести, FтрС
- сила трения, ТСВ-
сила натяжения троса со стороны груза
В, NС
- сила реакции опоры (рис. 2.10г). Тогда
условие равновесия при проектировании
на ось ОХ будет:
РСsin - РСcos*С – ТСВ = 0; так как ТВС = ТСВ,
60sin - 60*0,5cos – ТВС = 0.
Получим систему из трех уравнений с тремя неизвестными:
Так как неизвестные силы перпендикулярны оси y, то на эту ось силы не проектируем.
1 0sin
- cos
- ТАВ
= 0 (1);
0sin
- cos
- ТАВ
= 0 (1);
30sin - 7,5cos + ТВА - ТВС = 0 (2);
60sin - 30cos – ТВС = 0 (3).
Отсюда: ТАВ = 10sin - cos; ТВС = 60sin - 30cos.
Подставляя выражения ТАВ и ТВС в уравнение (2), получим:
100sin = 38.5cos; tg = 0.385; = arctg0.385; = 210.
Из уравнения (1) получим: ТАВ = 10sin210 - cos210 = 10*0,358 – 0,93 = 2,67Н.
ТАВ = 2,67Н.
Подставляя численные данные в уравнение (3), получим:
ТВС = 60sin210 - 30cos210 = 60*0,358 – 30*0,93 = 6,42Н;
ТВС = 6,42Н.
Ответ: = 210; ТАВ = 2,67Н; ТВС = 6,42Н.