

Связи и их реакции
Тело, перемещению которого в пространстве препятствует какие-нибудь другие тела, скрепленные или соприкасающиеся с данным, называется несвободным. Все то, что ограничивает перемещение данного тела в пространстве, называется связями.
Пример. Груз висит на веревке, ящик стоит на полу и т.д.
Сила, с которой данная связь действует на тело, препятствуя тем или иным его перемещениям, называется силой реакции (противодействия) связи или просто реакцией связи.
Силы, приложенные к телу, но не являющиеся реакциями, называются активными.
Направление силы реакции связи противоположно той, куда связь не дает перемещаться телу.
Направления реакций некоторых основных видов связи
1. Гладкая поверхность
Р еакция
связиN
гладкой поверхности или опоры направлена
по нормали к поверхностям соприкасающихся
тел в точке касания и приложена в этой
точке.
еакция
связиN
гладкой поверхности или опоры направлена
по нормали к поверхностям соприкасающихся
тел в точке касания и приложена в этой
точке.
а) б) в)
Рис. 1.5
Если одна из соприкасающихся поверхностей является точкой, то реакция направлена по нормали к другой поверхности (рис. 1.5).
2. Нить, стержень.
Р

 еакция
Т натянутой нити и нагруженного стержняS
направлена вдоль этих связей и приложена
в точке контакта (рис. 1.6).
еакция
Т натянутой нити и нагруженного стержняS
направлена вдоль этих связей и приложена
в точке контакта (рис. 1.6).
а) б)
Рис. 1.6
3 .
Цилиндрический шарнир (подшипник,
петля).
.
Цилиндрический шарнир (подшипник,
петля).
Р

 еакцияR
цилиндрического шарнира лежит в
плоскости, перпендикулярной оси шарнира,
и может иметь любое направление в этой
плоскости. Для определения R
ее раскладывают на два взаимноперпендикулярных
направления: Rx
и Ry
(рис. 1.7).
еакцияR
цилиндрического шарнира лежит в
плоскости, перпендикулярной оси шарнира,
и может иметь любое направление в этой
плоскости. Для определения R
ее раскладывают на два взаимноперпендикулярных
направления: Rx
и Ry
(рис. 1.7).
Рис. 1.7
4 .
Подвижная шарнирная опора.
.
Подвижная шарнирная опора.
Р еакция
связиR
направлена перпендикулярно плоскости
возможного перемещения шарнира (рис.
1.8).
еакция
связиR
направлена перпендикулярно плоскости
возможного перемещения шарнира (рис.
1.8).
5
Рис. 1.8
а)
б)
Рис. 1.9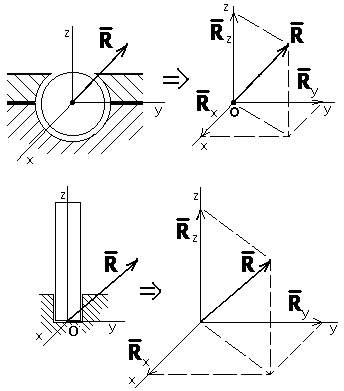
а) б)
Рис. 1.10
Р еакция
шарового шарнира и подпятника может
иметь любое направление в пространстве.
еакция
шарового шарнира и подпятника может
иметь любое направление в пространстве.
А
Рис. 1.11
а)
б)

Сложение сил
Геометрический способ сложения сил
В
а)
б)
Рис. 1.12
П


 усть
на твердое тело действует плоская
система сил (F1,
F2,
F3,
…, Fn)
(рис. 1.12).
усть
на твердое тело действует плоская
система сил (F1,
F2,
F3,
…, Fn)
(рис. 1.12).
И

 з
произвольно выбранной точки О откладывается
векторF1,
из его конца откладывается вектор F2
и т.д. Вектор R,
замыкающий силовой многоугольник,
является результирующим:
з
произвольно выбранной точки О откладывается
векторF1,
из его конца откладывается вектор F2
и т.д. Вектор R,
замыкающий силовой многоугольник,
является результирующим:
![]()
Сложение двух сил
Пусть на тело действуют две силы, лежащие в одной плоскости (рис. 1.13).
![]()

![]() .
.
Р
Рис. 1.13
![]() ;
; ![]() .
.
Сложение трех сил не лежащих в одной плоскости
Р ассмотрим
три силы
ассмотрим
три силы![]() ,
,![]() ,
,![]() не лежащие в одной плоскости (рис. 1.14).
Результирующая сила
не лежащие в одной плоскости (рис. 1.14).
Результирующая сила![]() равна:
равна:
![]() .
.
Направление силы определим по направляющим косинусам:
Рис. 1.14![]()
![]() ;
;
![]() .
.
Разложение сил
Разложение сил по двум заданным направлениям
П
 усть
надо силуF
разложить по направлениям AB
и AD
(рис. 1.15).
усть
надо силуF
разложить по направлениям AB
и AD
(рис. 1.15).
Рис. 1.15![]()
Задача сводится к построению параллелограмма, у которого стороны расположены по направлениям AB и AD и данная сила F является диагональю. Тогда стороны параллелограмма будут искомыми силами.
Разложение сил по трем заданным направлениям.

П
Рис. 1.16
![]() .
.
Вопросы для самоконтроля
Что изучает статика?
Что такое абсолютно твердое тело?
Основные виды связей и их реакции?
Геометрическое сложение сил?
Задачи, рекомендуемые для самостоятельного решения: 1.1 – 1.6 [2]
Литература: [1], [3], [4].
Лекция 2.
Действия над силами. Система сходящихся сил

Проекция силы на ось и на плоскость
П роекция
силы на ось.
Пусть сила F
образует с осью OX
угол
(рис. 2.1), тогда проекция этой силы на ось
будет:
роекция
силы на ось.
Пусть сила F
образует с осью OX
угол
(рис. 2.1), тогда проекция этой силы на ось
будет:
Fx = Fcos.
П
Рис. 2.1
П

 роекция
силы на плоскость.
Проекцией силы F
на плоскость OXY
называется вектор Fxy
= OB1,
заключенный между проекциями начала и
конца силы F
на эту плоскость (рис. 2.2.)
роекция
силы на плоскость.
Проекцией силы F
на плоскость OXY
называется вектор Fxy
= OB1,
заключенный между проекциями начала и
конца силы F
на эту плоскость (рис. 2.2.)
П
Рис. 2.2

А налитический
способ задания сил.
Для аналитического способа задания
силы необходимо выбрать систему координат
OXYZ
и спроектировать силу на оси координат
(рис. 2.3).
налитический
способ задания сил.
Для аналитического способа задания
силы необходимо выбрать систему координат
OXYZ
и спроектировать силу на оси координат
(рис. 2.3).
Направляющие косинусы определяются по формулам:
Рис. 2.3
![]()
![]()
![]() ;
;
![]() .
.
![]() .
.
Для плоской системы сил:
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.