

TASA / Androsovv_18
.docКонтрольне завдання №2
За передавальною функцією визначити тип динамічної ланки і побудувати графік перехідної функції, навести приклад ланки даного типу.
![]()
![]()
При порівнянні з типовими динамічними ланками визначаємо, що ця ланка є коливальною. Прикладами цієї ланки можуть слугувати електричний ланцюг, який складається з ємності С, індуктивності L та опору R, електродвигун та ін.
![]()
Знаходимо, що k = 4;
Т = 1;
2ξТр = 0 ξ = 0.
![]() ;
;
![]()
![]()
![]() ;
;
![]()
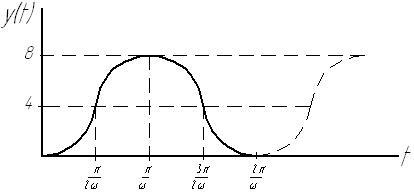
При проведенні розрахунків отримаємо:
t = 0 y (t) = 0;
t =
![]()
y (t)
= 4;
y (t)
= 4;
t =
![]()
y (t)
= 8;
y (t)
= 8;
t =
![]()
y (t)
= 4;
y (t)
= 4;
t =
![]()
y (t)
= 0.
y (t)
= 0.
Будуємо графік перехідної характеристики:
Контрольне завдання №3
Скласти амплітудно-фазову (АФХ), амплітудно-частотну (АЧХ) та фазочастотну (ФЧХ) характеристики за знайомою передавальною функцією ланки.
![]()
k = 4; Т = 0,6.
![]()
![]()
![]()
|
ω |
Re (ω) |
Im (ω) |
|
0 |
4 |
0 |
|
100 |
2 |
-3.5 |
|
200 |
-2 |
-3.5 |
|
300 |
-4 |
0 |
|
400 |
-2 |
3.5 |
|
500 |
2 |
3.5 |
Графік АФХ
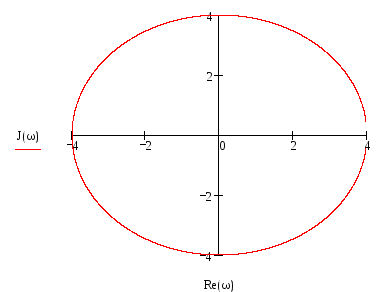
Im (ω)
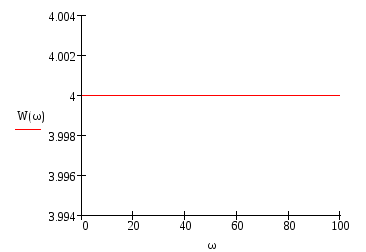
Для побудови графіка АЧХ використовуємо формулу:
![]()
|
ω |
W (ω) |
|
0 |
4 |
|
20 |
4 |
|
40 |
4 |
|
60 |
4 |
|
80 |
4 |
|
100 |
4 |
Графік АЧХ
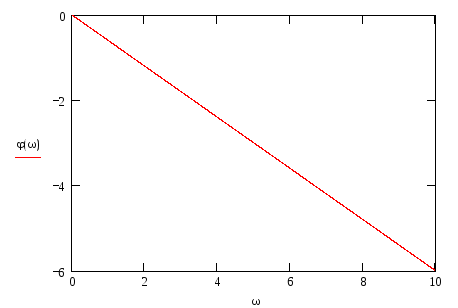
ФЧХ визначимо за формулою:
![]()
|
ω |
φ (ω) |
|
0 |
0 |
|
2 |
-0.8 |
|
4 |
-2.4 |
|
6 |
-3.6 |
|
8 |
-4.8 |
Графік ФЧХ
Контрольне завдання №4
Визначити стійкість розімкнутої системи автоматичного керування швидкістю руху конвеєра за частотним критерієм Михайлова.
![]()
k = 52 c-1; Тд = 0,44 с; Ту = 0,01 с
Стійкість автоматичних систем визначається з використанням частотного критерію Михайлова для замкнутих систем. Для цього визначається характерний багаточлен із передавальної функції, в якому окремо групується реальна частина багаточлена і умовна:
![]()
![]()
|
ω |
Re (ω) |
Im (ω) |
|
0 |
52 |
0 |
|
1 |
50.987 |
0.495 |
|
2 |
49.188 |
0.486 |
|
3 |
46.487 |
0.473 |
|
4 |
42.888 |
0.455 |
|
5 |
38.388 |
0.433 |
|
6 |
32.987 |
0.407 |
|
7 |
26.688 |
0.376 |
|
8 |
19.487 |
0.341 |
|
9 |
11.387 |
0.301 |
|
10 |
2.387 |
0.257 |
Im (ω)
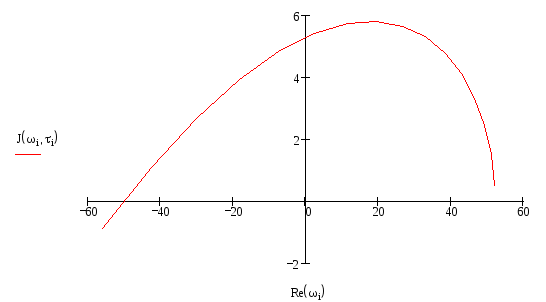
Re (ω)
По графіку робимо висновок, що система являється стійкою.
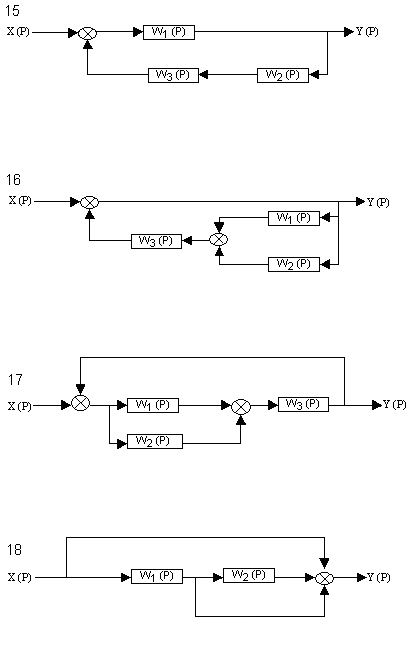
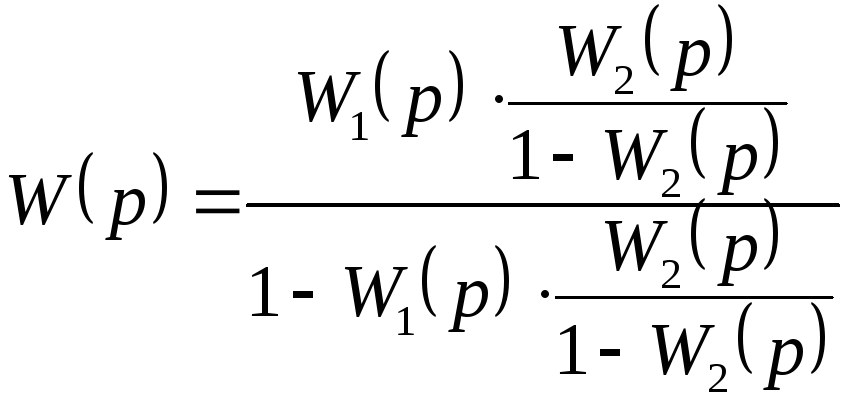
Контрольне завдання №5
Перетворити структурну схему.
Література
-
Зайцев Г.Ф. Теория автоматического управления и регулирования. - К.: Вища школа, 1989.-431с.
-
Метлюк Н.Ф. Автоматика и автоматизация производственных процессов. - Минск: Высшая школа, 1985.-301с.
-
Петров В.А. Автоматические системы транспортных машин. - М.: Машиностроение, 1974.-336с.
-
Методичні вказівки до виконання лабораторних робіт з дисциплін “Основи теорії автоматичних систем автомобіля” та “Автоматичне регулювання ДВЗ” для студентів спеціальностей 7.090211 “Колісні та гусеничні транспортні засоби” та 7.090210 «Двигуни внутрішнього згоряння» денної та заочної форм навчання. / Укл.: В.В.Брильов., Г.В.Борисенко – Запоріжжя: ЗНТУ, 2007.