

TASA / Pukhlovsky_28
.docКонтрольне завдання №2
За передавальною функцією визначити тип динамічної ланки і побудувати графік перехідної функції, навести приклад ланки даного типу.
![]()
![]()
При порівнянні з типовими динамічними ланками визначаємо, що ця ланка є запізнілою. Ця ланка передає сигнал без перекручувань, але при цьому вихідний сигнал запізнюється на постійну величину τ стосовно вхідного. Перехідна функція запізнілої ланки за своєю формою збігається з перехідною функцією пропорційної ланки, але зміщена за часом на τ. Прикладами цієї ланки являються релейний підсилювач, в якому час запізнення визначається часом спрацьовування реле, довгі електричні лінії та інше.
![]()
Знаходимо, що k = 0,5;
τ = 4;
![]()
При t = 4 маємо у = 0;
t = ∞ у = 0,5.
В результаті отримуємо пряму, зміщену на τ = 4.
Графіки перехідної характеристики будуть виглядати наступним чином:

Контрольне завдання №3
Скласти амплітудно-фазову (АФХ), амплітудно-частотну (АЧХ) та фазочастотну (ФЧХ) характеристики за знайомою передавальною функцією ланки.
![]()
k = 5; T = 4.
![]()
![]()
![]()
![]()
![]()
![]()
-
ω
Im(ω)
Re(ω)
0
0
8
1
1,6
8
2
3,2
8
3
4,8
8
4
6,4
8
5
8
8
6
9,6
8
7
11,2
8
8
12,8
8
9
14,4
8
10
16
8

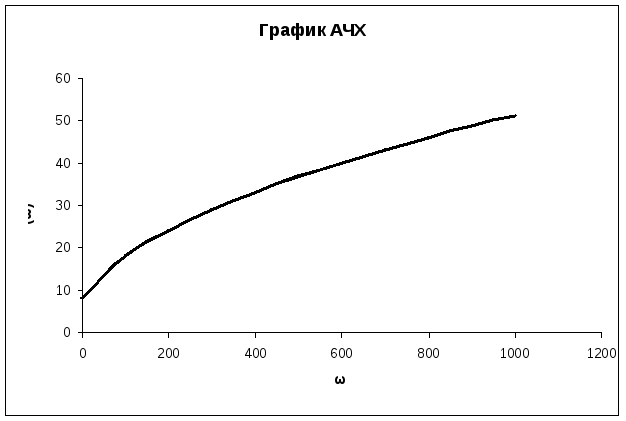
Для побудови графіка АЧХ використовуємо формулу:
![]()
-
ω
W(ω)
0
8
100
17,88854
200
24
300
28,84441
400
32,98485
500
36,66061
600
40
700
43,08132
800
45,9565
900
48,6621
1000
51,22499
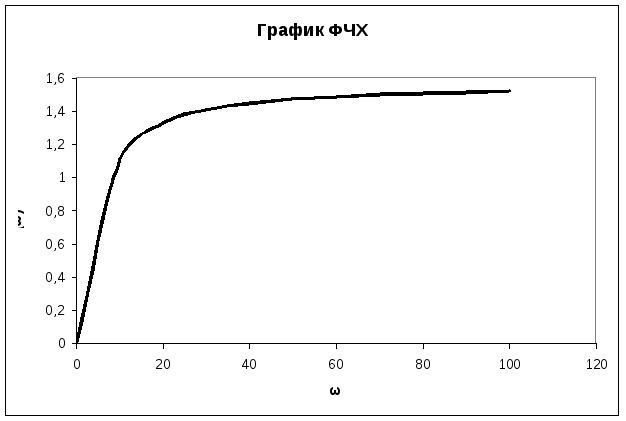
ФЧХ визначимо за формулою:
![]()
-
ω
φ(ω)
0
0
10
1,107149
20
1,325818
30
1,405648
40
1,446441
50
1,471128
60
1,487655
70
1,499489
80
1,508378
90
1,515298
100
1,520838
Контрольне завдання №4
Визначити стійкість розімкнутої системи автоматичного керування швидкістю руху конвеєра за частотним критерієм Михайлова.
![]()
k = 52 c-1; Тд = 0,44 с; Ту = 0,01 с
Стійкість автоматичних систем визначається з використанням частотного критерію Михайлова для замкнутих систем. Для цього визначається характерний багаточлен із передавальної функції, в якому окремо групується реальна частина багаточлена і умовна:
![]()
![]()
-
ω
Im(ω)
Re(ω)
0
0
52
1
0,9956
51,55
2
1,9648
50,2
3
2,8812
47,95
4
3,7184
44,8
5
4,45
40,75
6
5,0496
35,8
7
5,4908
29,95
8
5,7472
23,2
9
5,7924
15,55
10
5,6
7
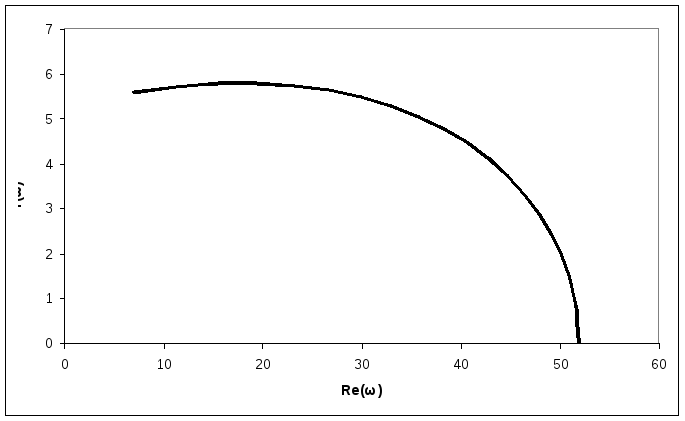
По графіку робимо висновок, що система являється стійкою.
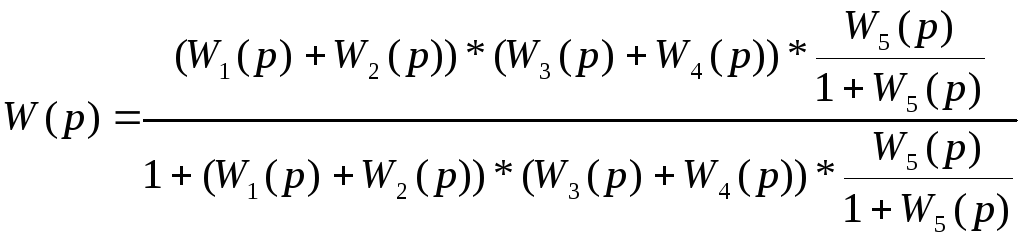
Контрольне завдання №5
Перетворити структурну схему.

Література
-
Зайцев Г.Ф. Теория автоматического управления и регулирования. - К.: Вища школа, 1989.-431с.
-
Метлюк Н.Ф. Автоматика и автоматизация производственных процессов. - Минск: Высшая школа, 1985.-301с.
-
Петров В.А. Автоматические системы транспортных машин. - М.: Машиностроение, 1974.-336с.
-
Методичні вказівки до виконання лабораторних робіт з дисциплін “Основи теорії автоматичних систем автомобіля” та “Автоматичне регулювання ДВЗ” для студентів спеціальностей 7.090211 “Колісні та гусеничні транспортні засоби” та 7.090210 «Двигуни внутрішнього згоряння» денної та заочної форм навчання. / Укл.: В.В.Брильов., Г.В.Борисенко – Запоріжжя: ЗНТУ, 2007.