

Перелік умовних позначень, символів, одиниць, скорочень і термінів
|
Слово (визначення) |
Скорочення (позначення) |
Умови використання |
|
Завдання Курсовий проект Коефіцієнт Пояснювальна записка Рисунок Рік Таблиця |
Завд. КП Коеф. ПЗ Рис р. Таб. |
У тексті Бланк завд. У тексті Бланк завд. У тексті У тексті У тексті |
|
Довжина і-ої ланки Кути, що визнач. положення ланок Передаточні функції (відношення) Момент сили Сила Робота сили Момент інерції Кінетична енергія Кутова швидкість Кутове пришвидшення Швидкість точки Пришвидшення точки Коеф. нерівномірності ходу машини Коефіцієнт корисної дії Масштабний коефіцієнт Маса ланки, модуль зубчатих коліс Число зубців Коефіцієнт перекриття Коефіцієнт питомого ковзання Коефіцієнт зміщення Кількість сателітів, коефіцієнт зміни середньої швидкості Фазові кути кулачка |
L,l α,β,γ,ψ Ui1, Vq1 M P,F,R,G A I T ω ε V a δ η, ККД μ m Z εα υ X K
φ |
У тексті і формулах |
ВСТУП
Механізм конвеєра використовується у багатьох галузях виробництва для переміщення виробів під час технологічної обробки, складання, контролю, тощо.
Створення сучасної машини вимагає від конструктора всебічного аналізу її проекту. Конструкція повинна задовольняти багатьом умовам, які можуть бути у протидії одна до одної. Наприклад, мінімальна динамічна завантаженість повинна узгоджуватись зі швидкохідністю, достатня надійність й довговічність повинна бути забезпечена при мінімальних габаритах і масі. Витрати на виготовлення та експлуатацію повинні бути мінімальними, але забезпечувати досягнення заданих параметрів. З великої кількості можливих рішень конструктор вибирає компромісне рішення з визначеним набором параметрів і проводить порівняльну оцінку різних варіантів. Зараз усі розрахунки виконують за допомогою ЕОМ, що дає можливість оцінювати конструкцію за багатьма критеріями якості і знайти максимум показників якості й ефективності.
Виконання усіх стадій проектування у визначений термін часу неможливо здійснити без втілення методів автоматизованого проектування машин. Навички роботи з ЕОМ (вміння користування різними програмами для розрахунків) використовуються в роботі над курсовим проектом з ТММ. Тут використовуються такі програми:
MECH – програма розрахунків для важільних механізмів другого класу;
ZUB, ZUB_COL – програми розрахунків параметрів зубчатого зачеплення;
PL_RED – програма проектування планетарних редукторів;
KULAK – програма проектування кулачкових механізмів:
TEST – програма тестового контролю знань студентів.
Основним є володіння аналітичними, графоаналітичними та графічними методами дослідження механізмів, оцінка отриманих результатів особливо з точки зору якісних показників. Це і є метою даної роботи.
Структурний аналіз механізму
С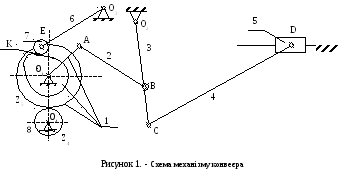 хема
механізму та вхідні дані для дослідження
наведені в [8, додаток Б.7, варіант 1].
хема
механізму та вхідні дані для дослідження
наведені в [8, додаток Б.7, варіант 1].
Механізм конвеєра складається з електродвигуна, планетарного редуктора (електродвигун і планетарний редуктор не показані на рисунку 1), відкритої зубчатої передачі коліс 4 і 5 (з числами зубців Z4і Z5 ) та шести ланкового важільного механізму із вхідною ланкою 1 і вихідною ланкою – повзуном 5. Крім того, автоматизація процесів руху здійснюється за допомогою кулачкового механізму з коливальним штовхачем.
Визначимо основні типи ланок, характер їх руху, клас і назву кінематичних пар. Результати зводимо в таблицю 1.
Таблиця 1. Характеристика ланок і кінематичних пар механізму.
|
Ланки механізму | ||||
|
Позначення |
Назва ланки |
Характер руху | ||
|
0 |
Стійка, корпус, станина |
Нерухомий | ||
|
1 |
Кривошип, кулачок і зубчате колесо Z5 |
Обертальний | ||
|
2 |
Шатун |
Плоский | ||
|
3 |
Коромисло |
Обертальний | ||
|
4 |
Шатун |
Плоский | ||
|
5 |
Повзун |
Поступальний | ||
|
6 |
Штовхач |
Обертальний | ||
|
7 |
Ролик |
Складний | ||
|
8 |
Зубчате колесо |
Обертальний | ||
|
Кількість рухомих ланок механізму n = 8 | ||||
|
Кінематичні пари (КП) | ||||
|
Позна-чення |
Характер відносного руху ланок, що утворюють КП |
Номера ланок, що утворюють КП |
Клас пари | |
|
О1 |
Обертальна |
0,1 |
5 | |
|
А |
Обертальна |
1,2 |
5 | |
|
О2 |
Обертальна |
0,3 |
5 | |
|
В |
Обертальна |
2,3 |
5 | |
|
С |
Обертальна |
3,4 |
5 | |
|
Д |
Обертальна |
4,5 |
5 | |
|
Д1 |
Поступальна |
0,5 |
5 | |
Продовження таблиці 1.
|
О3 |
Обертальна |
0,6 |
5 |
|
О4 |
Обертальна |
0,8 |
5 |
|
Е |
Обертальна |
6,7 |
5 |
|
К |
Складний, вища к.п. |
1,7 |
4 |
|
М |
Складний, вища к.п. |
1,8 |
4 |
|
Кількість кінематичних пар 5 – го класу - p5 = 10, 4 – го класу - p4 = 2 | |||
Усі кінематичні пари механізму – плоскі і дозволяють відносний рух ланок тільки в одній або у паралельних площинах, тому увесь механізм теж плоский.
С тупінь
волі механізму визначаємо за формулою
Чебишева: .
тупінь
волі механізму визначаємо за формулою
Чебишева: .
М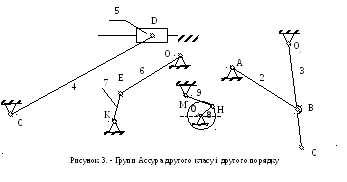 и
бачимо, що механізм може рухатись і з
однією ведучою ланкою 1. Це означає, що
до складу механізму входить одна зайва
ланка. Ця ланка – ролик, який поставлено
для зменшення тертя між кулачком і
штовхачем, але він не змінює характеру
їх відносного руху. Тому цю ланку (ролик)
ми з розгляду відкидаємо. Не має рації
також і кінематична параЕ.
и
бачимо, що механізм може рухатись і з
однією ведучою ланкою 1. Це означає, що
до складу механізму входить одна зайва
ланка. Ця ланка – ролик, який поставлено
для зменшення тертя між кулачком і
штовхачем, але він не змінює характеру
їх відносного руху. Тому цю ланку (ролик)
ми з розгляду відкидаємо. Не має рації
також і кінематична параЕ.
Після цього маємо: n = 7, p5 = 9 і p4 = 2.
Для визначення класу механізму замінюємо всі кінематичні пари четвертого класу на кінематичні ланцюги, в котрих є тільки пари п’ятого класу (рисунок 10.2).
Г

Найвищий клас груп Ассура – другий, тож і увесь механізм другого класу. Структурна формула побудови механізму
↓¯ II (8,9)
I (0,1)← II(2,3) ← II(4,5)
↑_ II (6,7)