

1.6.2 Предварительный выбор номинального момента двигателя маховичного электропривода
Если момент инерции на валу двигателя равен нулю, то нагрузочная диаграмма двигателя повторяет нагрузочную диаграмму механизма (с учетом потерь в передачах). В этом случае можно было бы выбрать двигатель с номинальным моментом МН=МЭ (эквивалентный, или среднеквадратичный момент), определенному по заданному графику нагрузки рабочей машины:
![]() .
(1.10)
.
(1.10)
Если же на валу
двигателя
![]() ,
то нагрузочная диаграмма электропривода
будет полностью выровнена и при этом
момент на валу двигателя будет иметь
постоянное во времени значение, равное
среднему моменту (МСР),
найденному из графика нагрузки:
,
то нагрузочная диаграмма электропривода
будет полностью выровнена и при этом
момент на валу двигателя будет иметь
постоянное во времени значение, равное
среднему моменту (МСР),
найденному из графика нагрузки:
 (1.11)
(1.11)
МСР<МЭ, так как двигатель нагружен не только статической, но и динамической нагрузкой.
Таким образом, при любых промежуточных значениях J от 0 до ∞ номинальный момент двигателя лежит в пределах от МСР до МЭ (то есть до среднеквадратичного), найденных по графику нагрузки механизма, пересчитанному (приведенному) на вал двигателя с учетом передаточного числа редуктора и потерь в передачах (рис. 1.12).
Последовательность предварительного выбора мощности двигателя следующая:
– определяется полная площадь нагрузочной диаграммы за цикл работы электропривода S [Нм·с];
– определяется среднее значение момента на валу привода за цикл –
![]() ,
Нм, (1.12)
,
Нм, (1.12)
или
 ,
как ранее указано в (1.11);
,
как ранее указано в (1.11);
– определяется номинальный момент предварительно выбранного двигателя :
![]() .
(1.13)
.
(1.13)
К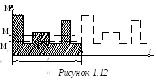 оэффициент
динамичностиКД
тем больше, чем резче пики нагрузки в
нагрузочной диаграмме механизма и чем
большее число включений в час должен
иметь двигатель (то есть чем больше у
него динамическая нагрузка).
оэффициент
динамичностиКД
тем больше, чем резче пики нагрузки в
нагрузочной диаграмме механизма и чем
большее число включений в час должен
иметь двигатель (то есть чем больше у
него динамическая нагрузка).
В литературе по маховичному электроприводу рекомендуются и другие формулы для предварительного определения МН. В этих формулах нет коэффициента динамичности К, но есть среднеквадратичный (эквивалентный) момент двигателя, при расчете которого учитывается реальная динамическая нагрузка электропривода. Эти формулы следующие:
![]() (средняя арифметическая
величина);
(средняя арифметическая
величина);
![]() (средняя
геометрическая);
(средняя
геометрическая);
– определяется мощность предварительно выбираемого двигателя :
![]() ,
,
где ωН должна быть известна по технологическим данным и кинематике механизма.
1.6.3 Предварительный выбор момента инерции маховика
Предварительный выбор момента инерции маховика упрощенно делается по так называемой избыточной площади нагрузочной диаграммы, то есть по площади, лежащей выше линии МСР.
Предполагается, что электропривод работает все время с моментом, равным МСР, работа совершается как двигателем, так и маховиком. Работа, выполняемая маховиком, пропорциональна избыточной площади. Остальное время, кроме пика нагрузки, двигатель работает на нагрузку и на зарядку маховика.
Предварительный выбор J маховика рассматривается для двух типов нагрузочных диаграмм.
Нагрузочная диаграмма задана в функции углового пути – М=f(α)
Такого типа диаграмма (рис. 1.13) характерна для механизмов с кривошипно-шатунной передачей – прессов, молотов, ножниц, подъемно-качающихся столов, различных сталкивателей, сбрасывателей слитков и др.
На рисунке 1.13:
1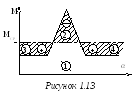 – площадь графика, пропорциональная
работе двигателя для вращения механизма
(полезная работа);
– площадь графика, пропорциональная
работе двигателя для вращения механизма
(полезная работа);
2 – избыточная площадь, характеризующая работу маховика при пике нагрузки (полезная работа, выполняемая за счет энергии, накопленной маховиком);
3 и 4 – площади графика, пропорциональные работе двигателя, затраченной на зарядку маховика энергией при холостом ходе механизма.
В этих рассуждениях есть допущение о работе двигателя со средним моментом МСР, то есть при идеальном выравнивании нагрузочной диаграммы.
Запас кинетической энергии маховика:
![]() [Дж=Н·м=Вт∙с],
(1.14)
[Дж=Н·м=Вт∙с],
(1.14)
где JМ – момент инерции маховика, Дж∙с2=Нм∙с2;
ω – угловая скорость вращения маховика, с-1.
При пике нагрузки скорость двигателя и маховика меняется в пределах от ωМАКС до ωМИН (в конце пика нагрузки). За период преодоления пика нагрузки запас кинетической энергии маховика уменьшится на величину ΔА:
![]() ,
,
![]() .
(1.15)
.
(1.15)
Энергия ΔА отдается маховиком рабочей машине за время пика нагрузки. В остальное время работы электропривода скорость маховика увеличивается вновь до ωМАКС, и его энергия вновь возрастает на ΔА.
Расчет по предварительному определению ΔА выполняется с использованием понятий о средней скорости (ωСР) и коэффициенте неравномерности хода (j):
![]() ;
(1.16)
;
(1.16)
![]() .
(1.17)
.
(1.17)
Величина j меняется в некоторых пределах для различных механизмов или (грубо) для отраслей промышленности:
ткацкие и мукомольные
машины –
![]() ;
;
металлорежущие
станки –
![]() ;
;
насосы, ножницы –
![]() ;
;
металлургические
механизмы (механизмы прокатных станов)
–
![]() .
.
Вводя ωСР и j в формулу для определения ΔА, получим:
![]()
![]()
![]() .
.
Принимая с
допущением, что
![]() ,
получим:
,
получим:
![]() ,
откуда
,
откуда
![]() ,
Нм·с2=Дж·с2=кг·м2.
(1.18)
,
Нм·с2=Дж·с2=кг·м2.
(1.18)
Нагрузочная диаграмма задана в функции времени – М=f(t).
В этом случае площадь графика (рис. 1.14) представляет импульс момента.
Н а
рисунке 1.14:
а
рисунке 1.14:
1 – импульс момента, необходимый для работы двигателя при пике нагрузки и холостом ходе;
2 – избыточный импульс момента за счет работы маховика. Площадь графика, выражащая избыточный импульс момента, обозначается как QИЗБ;
3 – импульс момента, необходимый для зарядки маховика.
Из курса теоретической
механики известно, что избыточный
импульс момента (![]() )
численно равен изменению момента
количества движения маховика.
)
численно равен изменению момента
количества движения маховика.
В общем виде
количество движения
![]() ,
а момент количества движения –
,
а момент количества движения –![]() .
.
Так как линейная
скорость
![]() ,
то
,
то![]()
![]() .
.
Изменение момента
количества движения –
![]() .
.
Рассматривая теперь работу электропривода с маховиком, запишем:
![]()
(1.19)
![]() ,
,
так как
![]() .
.
Принимая
![]() ,
получим, что
,
получим, что![]() ,
откуда
,
откуда
![]() ,
Нм·с2.
(1.20)
,
Нм·с2.
(1.20)
Изложенный метод определения МН и JМ может быть рассмотрен лишь как предварительный, так как он принципиально неверен по следующим причинам:
а) с одной стороны нагрузка двигателя при пиковом характере работы механизма полагается равномерной и равной МСР, а с другой стороны допускается колебание скорости от ωМАКС до ωМИН, что противоречиво, так как в этом случае не учитывается действительная механическая характеристика, а предполагается, что механическая характеристика двигателя вертикальна (абсолютно мягкая);
б) коэффициент j выбирается произвольно и ориентировочно;
в) метод дает только одно решение (при выбранном коэффициенте j), в то время как возможно несколько комбинаций МН и JМ.
1.6.4 Уточненный метод выбора момента инерции маховика по нагрузочной диаграмме МС=f(t)
Н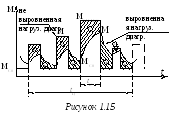 а
рисунке 1.15 показана нагрузочная диаграмма
электропривода прокатного стана, имеющая
пики статической нагрузки различные
по величине и длительности (в соответствии
с программой прокатки).
а
рисунке 1.15 показана нагрузочная диаграмма
электропривода прокатного стана, имеющая
пики статической нагрузки различные
по величине и длительности (в соответствии
с программой прокатки).
Общий принцип выравнивания нагрузки в электроприводе с маховиком заключается в том, что кинетическая энергия маховика к началу нового цикла должна оставаться неизменной, а скорость двигателя постоянной и равной ωС0 (статическая скорость в начале цикла).
При пиках нагрузки за время цикла маховик отдает энергию на вал двигателя (соответствует площади заштрихованных на рисунке 1.15 участков со знаком «минус»), а в периоды холостого хода запасает энергию (площадь заштрихованых участков со знаком «плюс»). Энергия, отданная маховиком за цикл, должна быть равна энергии, вновь им накопленной. Если это условие не соблюдается, то в последующие периоды начальная скорость цикла не будет оставаться неизменной (то есть двигатель при этом будет перегружен, либо он выбран завышенной мощности).
Наиболее точный
метод предварительного выбора МН
двигателя и JМ
маховика для маховичного электропривода
заключается в том, что из всего рабочего
цикла рассматривается лишь наиболее
тяжелый период загрузки двигателя (на
рисунке 1.15 это период времени tК).
В указанный период действует наибольший
статический момент МС.МАКС,
а двигатель в конце этого периода
развивает момент
![]() ,
а в начале периодаtК
– момент
,
а в начале периодаtК
– момент
![]() .
Для упрощения расчетов без большой
ошибки можно принять
.
Для упрощения расчетов без большой
ошибки можно принять![]() .
.
Для приведенного на рисунке 1.15 графика полагаем, что двигатель должен работать с максимально допустимой перегрузкой. Тогда, рассматривая механический переходный процесс (то есть процесс, описываемый только уравнением движения электропривода, учитывающим действие только электромеханической инерции), можно записать следующее соотношение для момента времени tК*):
![]() ,
(1.21)
,
(1.21)
где λ – коэффициент допустимой перегрузки двигателя по моменту.
Преобразуем соотношение (1.21) следующим образом:
![]() ;
;
|
|
|
*) теория механических переходных процессов подробно изложена в разделе курса, посвященном переходным процессам в электроприводе.
![]() ;
;
 ;
;
![]() .
(1.22)
.
(1.22)
В этом выражении
tК,
МС.МАКС
и МС
– параметры графика нагрузки, а МН,
λ,
ω0
и s(Н)
– параметры предварительно выбранного
двигателя;
![]() – электромеханическая постоянная
времени электропривода;J
– суммарный момент инерции на валу
электродвигателя; ω0
– скорость идеального холостого хода
двигателя; s(Н)
– скольжение при номинальной нагрузке
(показывает жесткость механической
характеристики двигателя, используемой
в маховичном электроприводе); R
– сопротивление цепи якоря (для двигателя
постоянного тока независимого
возбуждения); Ф
– магнитный поток двигателя.
– электромеханическая постоянная
времени электропривода;J
– суммарный момент инерции на валу
электродвигателя; ω0
– скорость идеального холостого хода
двигателя; s(Н)
– скольжение при номинальной нагрузке
(показывает жесткость механической
характеристики двигателя, используемой
в маховичном электроприводе); R
– сопротивление цепи якоря (для двигателя
постоянного тока независимого
возбуждения); Ф
– магнитный поток двигателя.
Из последнего соотношения определяется суммарная величина момента инерции на валу двигателя:
 ,
Н·м·с2.
(1.23)
,
Н·м·с2.
(1.23)
Момент инерции маховика определяется как
![]() ,
(1.24)
,
(1.24)
где JПР – момент инерции всех элементов электропривода, приведенных к валу двигателя, кроме маховика (то есть момент инерции собственно двигателя, передаточного устройства и рабочей машины).
После предварительного выбора двигателя (МН, ωН) и момента инерции маховика (JМ) необходимо построить нагрузочную диаграмму электропривода с учетом действия маховика и по этой диаграмме окончательно проверить двигатель по нагреву и перегрузке.